JP2010143530A - 車両用空力制御装置 - Google Patents
車両用空力制御装置 Download PDFInfo
- Publication number
- JP2010143530A JP2010143530A JP2008325936A JP2008325936A JP2010143530A JP 2010143530 A JP2010143530 A JP 2010143530A JP 2008325936 A JP2008325936 A JP 2008325936A JP 2008325936 A JP2008325936 A JP 2008325936A JP 2010143530 A JP2010143530 A JP 2010143530A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle body
- spoiler
- vehicle
- rotor
- endless belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Vehicle Body Suspensions (AREA)
Abstract
【課題】回転するスポイラでマグナス効果を発生し、走行中の車両を安定させる車両用空力制御装置を提供する。
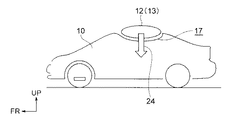
【解決手段】円柱形状のロータ12は軸12Cを中心として矢印20のように回転可能に支持されている。車体10には複数のロータ12が設けられ、走行中はロータ12には車体前方より走行風22が吹き付けている。ロータ12が矢印20のように回転していると、その表面では上下に別れた走行風22はそれぞれ車体上方では走行風22A、車体下方では走行風22Bのようにロータ12の上下を通過する。ロータ12の回転(矢印20)が風向と逆であるため、走行風22Aは流速が低下する。走行風22Bはロータ12の表面が風向と同方向に回転移動するため、流速が高くなる。ロータ12の車体上側では気圧が高く、車体下側では気圧が低くなるため各々のロータ12に対してダウンフォース24が発生し、車体10全体を車体下側に押し付ける。
【選択図】図1
【解決手段】円柱形状のロータ12は軸12Cを中心として矢印20のように回転可能に支持されている。車体10には複数のロータ12が設けられ、走行中はロータ12には車体前方より走行風22が吹き付けている。ロータ12が矢印20のように回転していると、その表面では上下に別れた走行風22はそれぞれ車体上方では走行風22A、車体下方では走行風22Bのようにロータ12の上下を通過する。ロータ12の回転(矢印20)が風向と逆であるため、走行風22Aは流速が低下する。走行風22Bはロータ12の表面が風向と同方向に回転移動するため、流速が高くなる。ロータ12の車体上側では気圧が高く、車体下側では気圧が低くなるため各々のロータ12に対してダウンフォース24が発生し、車体10全体を車体下側に押し付ける。
【選択図】図1
Description
本発明は車両用空力制御装置に関する。
従来から、円柱状の回転体を回転させることにより、マグナス効果による揚力を発生させる空力装置が存在する(例えば、特許文献1参照)。あるいは回転体を回転させることにより車両の挙動を安定させる荷重配分器が存在する(例えば、特許文献2参照)。
特開昭61−57490号公報
実開平06−3783号公報
移動中の構造物(例えば船舶)に発生する風圧抵抗を、揚力や推進方向の力として利用するため、上記特許文献1のように構造物の上下方向や左右方向に沿って設けられたローターを回転させる構成が存在するが、ロータの回転には動力源が必要であり、コストおよび重量が嵩み、また別途動力源のためエネルギー源が必要となる。
さらに特許文献2に記載の荷重分配機は旋回中の車両のロールを低減する効果のみであり、ピッチング、ノーズダイブ、スクォートの解消や、オーバーステア、アンダーステアの解消あるいはスリップアングルの低減といった課題を解決することはできない。
走行中の車両は揚力ではなくダウンフォースを必要とし、且つ旋回中や加速、減速中の車両は前後左右および上下へのモーメントが発生するため、車両を安定させるにはこれらのモーメントへの対応が必要となる。
本発明は上記事実を考慮し、回転するスポイラでマグナス効果を発生し、走行中の車両を安定させる車両用空力制御装置を提供することを目的とする。
請求項1に記載の本発明における車両用空力制御装置は、車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラと、前記スポイラ内に、半径方向に移動可能に収容されると共に、対称形に複数個配置され、自重により径方向一方側に突出可能に支持された突出部と、を備えたことを特徴とする。
上記構成によれば、自重で径方向に突出する突起部が車体下側にあるときは車体下方向に自重で突出し、車体上側に来たときは自重でスポイラ内部に収納されるため突起部が走行風を受けてスポイラを回転させ、モータなどの外部動力なしで回転するスポイラとすることができる。
請求項2に記載の本発明における車両用空力制御装置は、車幅方向を軸方向として配置され、軸線回りに回転可能に支持された左右一対の円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた左右一対の無端ベルト形状のスポイラと、前記左右一対の円柱形状のスポイラまたは前記左右一対の無端ベルト形状のスポイラにそれぞれ設けられ、各々独立して回転駆動させる回転手段と、操舵角を検知し、前記回転手段を制御する制御手段と、を備え、前記制御手段は操舵角に基づいて操舵方向側の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラがダウンフォースを発生させるように回転駆動され、操舵方向反対側の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラは停止または逆回転させることを特徴とする。
上記構成によれば、操舵時には操舵角に基づいてイン側のスポイラを駆動し、ダウンフォースを発生させることでイン側のリフトを打ち消し、アウト側のスポイラは駆動しないか又は逆回転させることでダウンフォースを発生させないか又は揚力を発生させ、アウト側をリフトさせる。これにより操舵時に発生するコーナリング中の車体のロールを打ち消し、安定した車体の旋回性能を得ることができる。
請求項3に記載の本発明における車両用空力制御装置は、車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、制動操作を検知し、前記回転手段を制御する制御手段と、を備え、前記制御手段は制動操作に基づいてダウンフォースを発生させるように前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動することを特徴とする。
上記構成によれば、制動時には制動操作を検知し、制動操作に基づいてスポイラを駆動させてダウンフォースを得ることにより、制動時のノーズダイブやブレーキングによるタイヤのグリップ限界を緩和し、より強くタイヤをグリップさせることができるので、制動時の車両の姿勢を安定させることができる。
請求項4に記載の本発明における車両用空力制御装置は、少なくとも車体前後に一対設けられ、車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、車体のピッチングを検知し、前記回転手段を制御する制御手段と、を備え、前記制御手段は車体が前下がりの時には車体後方でダウンフォースを発生させるように車体後方の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動し、車体が前上がりの時には車体前方でダウンフォースを発生させるように車体前方の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動することを特徴とする。
上記構成によれば、車両のピッチングを検知し、急制動時などノーズダイブが発生した時には、これを打ち消す方向に車体後方でダウンフォースを発生させて車体前端をリフトさせ、急加速時などスクォートが発生した時には、これを打ち消す方向に車体前方でダウンフォースを発生させて車体後端をリフトさせるように制御することで、車両のピッチングを抑制することができる。
請求項5に記載の本発明における車両用空力制御装置は、少なくとも車幅方向に一対設けられ、車体上下方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車体上下方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、前記回転手段を制御する制御手段と、操舵角度を検知し、前記制御手段に伝達する舵角センサと、車体前後端の横Gを検知し、前記制御手段に伝達する少なくとも前後一対の横Gセンサと、を備え、前記制御手段は旋回中に前記舵角センサおよび前記横Gセンサからの情報に基づきオーバーステアあるいはアンダーステアを検知すると、オーバーステア時には車体前方をアウト側へ、車体後方をイン側へ付勢するモーメントを発生させ、アンダーステア時には車体前方をイン側へ、車体後方をアウト側へ付勢するモーメントを発生させるように前記回転手段を制御することを特徴とする。
上記構成によれば、旋回中にオーバーステアが発生した際には、これを打ち消す方向に車体前端をアウト側に、車体後端をイン側に付勢するヨーイングモーメントを発生させ、アンダーステアが発生した際には、これを打ち消す方向に車体前端をイン側に、車体後端をアウト側に付勢するヨーイングモーメントを発生させることで、オーバーステアおよびアンダーステアを抑制することができる。
請求項6に記載の本発明における車両用空力制御装置は、少なくとも車幅方向に一対設けられ、車体上下方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車体上下方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、前記回転手段を制御する制御手段と、路面に対する車体のスリップアングルを検出し、前記制御手段に伝達するスリップアングルセンサと、を備え、前記制御手段は前記スリップアングルが所定の角度より大きいとき、前記スリップアングルを解消するモーメントを発生させるように前記回転手段を制御することを特徴とする。
上記構成によれば、前輪の進む方向と車体の進行方向に解離が生じ、いわゆるスリップアングルが発生し、スリップアングルが一定の閾値を超えた際にはこれを打ち消す方向に、前輪の進む方向よりも車体が右へ進行していれば車体前端を右へ付勢し、車体後端を左へ付勢するヨーイングモーメントを発生させることで、前輪の進む方向と車体の進行方向の解離を減少させ、スリップアングルを抑制することができる。
本発明に係る車両用空力制御装置は上記構成としたので、回転するスポイラでマグナス効果を発生し、走行中の車両を安定させることができるという優れた効果が得られる。
<構造の概要>
本発明の第1実施形態に係る車両用空力制御装置の詳細を図1および図2に従って説明する。
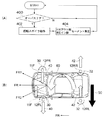
図1には、本発明が適用された第1実施形態に係る車両用空力制御装置が示されている。なお各図において、図中矢印FRは車体前方方向を、矢印REは車体後方方向を、矢印UPは車体上側方向を、矢印INは車体内側方向を、矢印OUTは車体外側方向を示す。
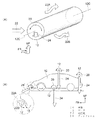
図1(A)に示すように、車幅方向に延設された円柱形状のロータ12は図示しない駆動手段によって軸12Cを中心として矢印20のように回転可能に支持されている。図1(B)に示すように車体10には複数のロータ12が設けられ、それぞれ矢印20の方向に回転可能とされている。
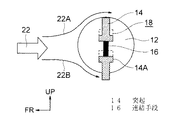
図2に示すようにロータ12の内部に設けられた空隙18には、一対の突起14がロータ12の径中心に対して対称となるように一対設けられている。一対の突起14はロータ12の径方向中心部分において、互いに連結手段16で連結され、一方の突起14のみがロータ12の表面から突出可能とされている。
突起14は車体下側に位置するときロータ12から自重で車体下側に突出し、ロータ12が回転して車体上側に移動すると自重でロータ12内部の空隙18へ収容される。
またロータ12の外周面は平滑な面に限定されず、微細な穴などの凸凹や歯車状の凹凸、あるいは整流効果のある溝やフィンなどが設けられていてもよい。
<作用効果>
次に本発明の第1実施形態の作用および効果について説明する。
次に本発明の第1実施形態の作用および効果について説明する。
図1(A)に示すように、走行中はロータ12には車体前方より走行風22が吹き付けている。ロータ12が矢印20のように回転していると、その表面では上下に別れた走行風22はそれぞれ車体上方では走行風22A、車体下方では走行風22Bのようにロータ12の上下を通過する。
このとき走行風22Aは、ロータ12の回転(矢印20)が走行風22Aの風向と逆であるため、これに伴う表面摩擦によって流速が低下する。逆に走行風22Bは矢印20のようなロータ12の回転に伴い、ロータ12の表面が風向と同方向に回転移動するため、流速が高くなる。
このためロータ12の車体上側では気圧が高く、車体下側では気圧が低くなる。これによりロータ12に対しては、車体下側に吸引される方向に力が働く(マグナス効果)。図1(B)に示すように車体10に設けられたロータ12が矢印20の方向に回転した場合は、上記の効果により各々のロータ12に対して矢印のようにダウンフォース24が発生し、車体10全体を車体下側に押し付ける方向に力が働く。
これにより車体10はエアダムやウイングなどの空力的付加物によって発生する空力効果に加えて、ロータ12で発生するダウンフォース24によっても安定して接地性を得ることができ、より安定した走行が可能となる。
また車体10の車体前方端に設けられたロータ12の場合は一点鎖線で拡大図を示したように、車体10との間を流れる走行風22が斜め上前方から斜め下後方に流れるようにすれば、車体前方へのベクトルを含むダウンフォース24’とすることができ、走行性能および経済性の改良が期待できる。
図2に示すようにロータ12に設けられた一対の突起14は車体下側に位置するときロータ12から自重で車体下側に突出して、前方からの走行風22Bを受ける。このためロータ12は矢印20の方向へ回転するように力を受ける。
さらにロータ12の回転によって、走行風22Bを受けた突起14が車体上側に移動すると、突起14は自重でロータ12内部の空隙18へ収容される。このため車体上側では、突起14は走行風22Aを受けることはなく、常にロータ12の車体下側でのみ突起14は走行風22Aを受けるので、他に駆動手段を設ずとも走行風22Aによって矢印20方向に回り続けることができる。
<第2実施形態>
本発明の第2実施形態に係る車両用空力制御装置の詳細を図3に従って説明する。
本発明の第2実施形態に係る車両用空力制御装置の詳細を図3に従って説明する。
図3には、本発明が適用された第1実施形態に係る車両用空力制御装置が示されている。
図3(B)に示すように、車幅方向に延設された円柱形状のロータ12は図示しない駆動手段によって回転可能に支持されている点は第1実施形態と同様である。本実施形態においては、ロータ12は車幅方向中央で左右に2分割され、ロータ12Rとロータ12Lとしてそれぞれ独立して駆動可能とされている。
図3(C)に示すように、前輪11Fに舵角を与えて走行中の車体10を旋回させる操舵装置19には伝達手段29が設けられ、ロータ12Rとロータ12Lとにそれぞれ制動をかける制動手段27Rと制動手段27Lとに操舵装置19から舵角および操舵方向に関する情報が伝達される。
制動手段27と伝達手段29とは例えばワイヤブレーキや油圧アクチュエータのように機械的な接続でもよく、あるいは図示しない制御手段を解して伝達手段29が伝達する舵角および操舵方向の情報より電磁ブレーキ等を操作する、電気的な接続方法であってもよい。この場合の伝達手段29はポジションセンサ等を使用することができる。
制動手段27は、伝達手段29による操舵装置19の舵角および操舵方向の情報から、操舵装置19が舵を切った方向のロータ12(右へ操舵すれば車体右側のロータ12R)はそのまま作動させ、他方のロータ12(右へ操舵すれば車体左側のロータ12L)は減速あるいは停止させるように制御される構成となっている。
<作用効果>
次に本発明の第2実施形態の作用および効果について説明する。
次に本発明の第2実施形態の作用および効果について説明する。
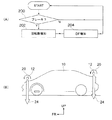
図3(B)に示すように、旋回中の車体10には旋回する方向に応じて車体10を左右に傾かせる、いわゆるロールが発生する。図3(B)のように右に旋回すれば矢印25のように車体10をロールさせる力が働き、このロールが大きくなれば走行安定性に影響を与える虞がある。
本実施形態においては図3(A)にフローチャートで示すように、操舵装置19が作動し、車体10が旋回を開始すると、旋回方向アウト側の制動手段27のみが作動し、ロータ12を停止または減速させる。
図3(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ100では図示しない舵角センサが、車体が操舵状態であるか否かの判定を行う。操舵状態であると判定された場合はステップ102へ移行する。
ステップ102では、旋回方向が右旋回であるか左旋回であるかを舵角センサからの舵角情報に基づいて判定する。結果が左旋回であればステップ104へ、右旋回であればステップ106へ移行する。
ステップ104では、車体が左旋回していると判断され、右側のロータ12Rのみ回転駆動され、左側のロータ12Lには制動手段27Lが作動することで制動がかかる。
ステップ106では、車体が右旋回していると判断され、左側のロータ12Lのみ回転駆動され、右側のロータ12Rには制動手段27Rが作動することで制動がかかる。図示しない舵角センサからの舵角情報が直進を示すまで、ステップ100に戻って上述の処理が繰り返される。
上記のようにしてロータ12が駆動制御された結果、図3(B)および図3(C)に示すように車体10が右に旋回すれば旋回方向アウト側、つまり左側の制動手段27Lのみが作動し、左側のロータ12Lが停止または減速する。
これにより左側のロータ12Lではダウンフォースは発生しないか、または効果が弱くなり、且つ右側のロータ12Rで発生するダウンフォース24が車体10に働くため、図3(B)に矢印25で示す車体10のロールを打ち消す方向にダウンフォース24を利用することができる。
この構成とすることで、図3(B)に示すように旋回中の車体10に対してイン側のロータ12のみを作動させ、車体10のロールを抑えることで、より安定した旋回を行うことができる。
<第3実施形態>
本発明の第3実施形態に係る車両用空力制御装置の詳細を図4に従って説明する。
本発明の第3実施形態に係る車両用空力制御装置の詳細を図4に従って説明する。
図4には、本発明が適用された第3実施形態に係る車両用空力制御装置が示されている。図4(B)に示すように、車体10には車幅方向に延設された円柱形状のロータ12が車体前後に少なくとも一対設けられている点は第1実施形態と同様である。
ロータ12はそれぞれ図示しない駆動手段によって回転軸を中心として矢印20のように回転可能に支持され、また図示しない制御手段によって回転速度が制御されている。車体10には図示しないブレーキ(制動手段)が設けられ、ブレーキ作動の有無はデータとして図示しない制御手段に送られる。
<作用効果>
次に本発明の第3実施形態の作用および効果について説明する。
次に本発明の第3実施形態の作用および効果について説明する。
図4(A)にフローチャートで示すように、図示しないブレーキが作動すると図示しないブレーキセンサにより検知された制動操作が制御手段にデータとして送られ、図示しない駆動手段を制御してロータ12の回転速度を増加させる。
図4(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ200では図示しないブレーキセンサが、車体が制動状態であるか否かの判定を行う。制動状態であると判定された場合はステップ202へ移行する。
ステップ202では、図示しない制御手段に対して回転数を増加させる命令を発する。これによりロータ12の回転数が増加し、ステップ204に移行する。
ステップ204では、ロータ12の回転数が増加したことによりダウンフォース24が増加し、車体10のリフトを抑制する。図示しないブレーキセンサからの情報がブレーキ開放を示すまで、ステップ200に戻って上述の処理が繰り返される。
この構成とすることで、図4(B)に示すように車体前後に設けられたロータ12がより高速で回転し、発生するダウンフォース24も増加する。これにより制動中の車体10を車体下方により強く押し付けられ、より安定した制動を行うことができる。
<第4実施形態>
本発明の第4実施形態に係る車両用空力制御装置の詳細を図5に従って説明する。
本発明の第4実施形態に係る車両用空力制御装置の詳細を図5に従って説明する。
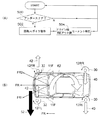
図5には、本発明が適用された第4実施形態に係る車両用空力制御装置が示されている。図5(B)、図5(C)に示すように、車体10には車幅方向に延設された円柱形状のロータ12が車体前後に少なくとも一対設けられている点は第1実施形態と同様である。
ロータ12はそれぞれ図示しない駆動手段によって回転軸を中心として矢印20のように回転可能に支持され、また図示しない制御手段によって回転速度および回転方向が制御されている。車体10の車体前後端近傍には図示しない車高センサが設けられ、車体前後の車高に差があるか否か、あればその差がデータとして図示しない制御手段に送られる。
<作用効果>
次に本発明の第4実施形態の作用および効果について説明する。
次に本発明の第4実施形態の作用および効果について説明する。
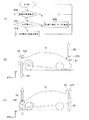
図5(A)にフローチャートで示すように、図示しない車高センサが車体前後で車高に差を検知した場合、図示しない制御手段にデータとして送られ、図示しない駆動手段を制御して車体前後に設けられたロータ12の回転速度をそれぞれ増加あるいは減少、または逆回転させる。
図5(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ300では図示しない車高センサが、車体がピッチングを起こしている状態であるか否かの判定を行う。ピッチングを起こしている状態であると判定された場合はステップ302へ移行する。
ステップ302では、図示しない車高センサが車体10の前が高い、スクォート状態であるか否かを判定する。スクォート状態であると判定された場合はステップ304へ、逆にノーズダイブ状態であると判定された場合はステップ306へ移行する。
ステップ304では、図5(B)に示すように、車体前方のロータ12Fの回転数を増加させ、車体後方のロータ12Rを矢印21のように逆回転させる。ロータ12Fの回転数を増加したことにより車体前方ではダウンフォース24が増加し、またロータ12Rが逆回転することにより車体後方では揚力26が発生する。これにより車体10のスクォートを抑制する。
ステップ306では、図5(C)に示すように、車体後方のロータ12Rの回転数を増加させ、車体前方のロータ12Fを矢印21のように逆回転させる。ロータ12Rの回転数を増加したことにより車体後方ではダウンフォース24が増加し、またロータ12Fが逆回転することにより車体前方では揚力26が発生する。これにより車体10のノーズダイブを抑制する。図示しない車高センサからの情報が車体前後で車高に差なしを示すまで、ステップ300に戻って上述の処理が繰り返される。
この構成とすることで、図5(B)、図5(C)に示すように車体前後に設けられたロータ12F、ロータ12Rがそれぞれより高速で回転し、あるいは逆回転することで発生するダウンフォース24を増加させ、あるいは揚力26を発生させる。
これにより上記のスクォート、ノーズダイブ状態に加えて車体10の前後が上下方向に振れる、いわゆるピッチングを解消する方向にダウンフォース24と揚力26を発生させることができるので、より安定した走行を行うことができる。
<第5実施形態>
本発明の第5実施形態に係る車両用空力制御装置の詳細を図6および図7に従って説明する。図6および図7には、本発明が適用された第5実施形態に係る車両用空力制御装置が示されている。
本発明の第5実施形態に係る車両用空力制御装置の詳細を図6および図7に従って説明する。図6および図7には、本発明が適用された第5実施形態に係る車両用空力制御装置が示されている。
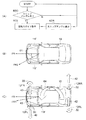
図6(B)、図7(B)に示すように、車体10には車体上下方向に延設された円柱形状のロータ112が少なくとも車体前または後端近傍において車幅方向両端に一対、より望ましくは車体前後端近傍に一対づつ設けられている。
ロータ112はそれぞれ図示しない駆動手段によって回転軸を中心として矢印30または矢印32のように回転可能に支持され、また図示しない制御手段によって回転速度および回転方向が制御されている。車体10には図示しない舵角センサ、および車体前後端における左右方向の加速度を検知する加速度センサが設けられ、運転者が操舵した際の舵角、および車体10の前後端における左右方向のモーメントを検知し、データとして図示しない制御手段に送る。
<作用効果>
次に本発明の第5実施形態の作用および効果について説明する。
次に本発明の第5実施形態の作用および効果について説明する。
図6(A)にフローチャートで示すように、旋回中の車体10において図示しない舵角センサが検出した前輪11Fの方向(=進みたい方向FR1)に対して、図示しない加速度センサが車体後端が矢印50のようにアウト側へ滑り始め、車体10が方向FR2へ向かう、いわゆるオーバーステアの状態であると制御手段が判断した場合、ロータ112をそれぞれ動作させ、オーバーステア状態のモーメントを打ち消す方向(矢印60)に車体前後端にモーメントを発生させる。
図6(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ400では図示しない舵角センサおよび加速度センサが、車体がオーバーステアであるか否かの判定を行う。オーバーステアであると判定された場合はステップ402へ移行する。
ステップ402では、図6(B)に示すように、図示しない制御手段が車体前方のロータ112FRおよびロータ112FLは矢印30方向に回転させるように、また車体後端のロータ112RRおよびロータ112RLは矢印32方向に回転させるように図示しない回転手段に指示を出し、ステップ404に移行する。
ステップ404では、車体前方のロータ112FRおよびロータ112FLが矢印30方向に回転することにより矢印40のように車体前端をアウト側へ向けるモーメントを発生させ、車体後端のロータ112RRおよびロータ112RLは矢印32方向に回転することにより、矢印42のように車体後端をイン側へ向けるモーメントを発生させる。これにより車体10をオーバーステア方向に回転させようとするモーメントを打ち消し、(矢印60)安定した旋回を行うことができる。
図示しない舵角センサおよび加速度センサからの情報が、オーバーステア状態の解消を示すまで、ステップ400に戻って上述の処理が繰り返される。
図7(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ500では図示しない舵角センサおよび加速度センサが、車体がアンダーステアであるか否かの判定を行う。アンダーステアであると判定された場合はステップ502へ移行する。
ステップ502では、図7(B)に示すように、図示しない制御手段が車体前方のロータ112FRおよびロータ112FLは矢印32方向に回転させるように、また車体後端のロータ112RRおよびロータ112RLは矢印30方向に回転させるように図示しない回転手段に指示を出し、ステップ504に移行する。
ステップ504では、車体前方のロータ112FRおよびロータ112FLが矢印32方向に回転することにより矢印42のように車体前端をイン側へ向けるモーメントを発生させ、車体後端のロータ112RRおよびロータ112RLは矢印30方向に回転することにより、矢印40のように車体後端をアウト側へ向けるモーメントを発生させる。これにより車体10をアンダーステア方向に回転させようとするモーメントを打ち消し、(矢印62)安定した旋回を行うことができる。
図示しない舵角センサおよび加速度センサからの情報が、アンダーステア状態の解消を示すまで、ステップ500に戻って上述の処理が繰り返される。
上記の実施形態では車体前後方向に一対づつのロータ112が設けられているが、これに限定せず車体前端または車体後端に左右一対のみ設けられたロータ112を駆動することにより、車体前端または車体後端でオーバーステアあるいはアンダーステアを解消する方向にモーメントを発生させる構成とされていてもよい。
<第6実施形態>
本発明の第6実施形態に係る車両用空力制御装置の詳細を図8に従って説明する。図8には、本発明が適用された第6実施形態に係る車両用空力制御装置が示されている。
本発明の第6実施形態に係る車両用空力制御装置の詳細を図8に従って説明する。図8には、本発明が適用された第6実施形態に係る車両用空力制御装置が示されている。
図8(B)に示すように、車体10には車体上下方向に延設された円柱形状のロータ112が少なくとも車体前または後端近傍において車幅方向両端に一対、より望ましくは車体前後端近傍に一対づつ設けられている点は第5実施形態と同様である。
ロータ112はそれぞれ図示しない駆動手段によって回転軸を中心として矢印30または矢印32のように回転可能に支持され、また図示しない制御手段によって回転速度および回転方向が制御されている。車体10には図示しない舵角センサ、車輪速度センサ、加速度センサ、車体の進行方向を検知するヨーレートセンサなどが設けられ、運転者が操舵した際の舵角に応じた前輪11Fの方向FR1と車体10が実際に進行する方向FR2とのなす角度であるスリップアングルθ1を検知し、データとして図示しない制御手段に送る。
<作用効果>
次に本発明の第6実施形態の作用および効果について説明する。
次に本発明の第6実施形態の作用および効果について説明する。
図8(A)にフローチャートで示すように走行中の車体10において、図示しない各種センサが検出した前輪11Fの方向(=進みたい方向FR1)と車体10が実際に進行する方向FR2とのなす角度であるスリップアングルθ1が所定の値よりも大きいと図示しない制御手段が判断した場合、ロータ112を作動させてスリップアングルθ1を縮小させる。
図8(A)のフローチャートを参照して本実施例の作用を説明する。まずステップ600では図示しない舵角センサ、加速度センサ、ヨーレートセンサが、図7(B)に示す車体のスリップアングルθ1が所定の閾値以上であるか否かの判定を行う。閾値以上であると判定された場合はステップ602へ移行する。
ステップ602では、図7(C)に示すように、図示しない制御手段が車体前方のロータ12FRおよびロータ12FLは矢印30方向に回転させるように、また車体後端のロータ12RRおよびロータ12RLは矢印32方向に回転させるように図示しない回転手段に指示を出し、ステップ604に移行する。
ステップ604では、車体前方のロータ12FRおよびロータ12FLが矢印30方向に回転することにより矢印40のように車体前端をFR2側へ向けるモーメントを発生させ、車体後端のロータ12RRおよびロータ12RLは矢印32方向に回転することにより、矢印42のように車体後端をFR2と逆側へ向けるモーメントを発生させる。これにより車体10のスリップアングルθ1をθ2のように減少させ、安定した走行を行うことができる。
図示しない舵角センサ、加速度センサおよびヨーレートセンサからの情報が、スリップアングルθ1が所定の閾値以下を示すまで、ステップ600に戻って上述の処理が繰り返される。
上記の処理により車体10が実際に進行する方向は方向FR3となり、スリップアングルθ1はスリップアングルθ2のように縮小され、前輪11Fの方向(=進みたい方向FR1)と車体10が実際に進行する方向FR3とのズレは小さくなるため、より自然な感覚で安定した走行を行うことができる。
<他の実施形態>
本発明の他の実施形態の詳細を図9、図10、図11に従って説明する。
本発明の他の実施形態の詳細を図9、図10、図11に従って説明する。
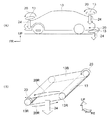
図9には本発明が適用された第7実施形態に係る車両用空力制御装置が示されている。図9(A)に示すように、車体10にはロータ12に代えて、車幅方向に複数延設されたシャフト13Rに巻き掛けられ車体前後方向に駆動されるベルト13が設けられている。
図9(B)に示すように、ベルト13は車幅方向に延設され図示しない駆動手段で回転駆動される複数のシャフト13Rに巻き掛けられ、矢印20Rのように車体前後方向に駆動される。あるいはシャフト13Rは従動ローラとされ、ベルト13の外周面をプーリーなどで駆動する方式とされていてもよい。
あるいはシャフト13Rが車体上下方向に延設され、複数のシャフト13Rにベルト13が巻き掛けられる構成であってもよい。
この構成とすることで、シャフト13Rが矢印20のように回転するとき、ベルト13は矢印20Rのように搬送駆動されるので、ベルト13の外周面13Bと走行風との間でマグナス効果が発生し、車体10に対してダウンフォース24を発生させることができる。あるいはシャフト13Rを車体上下方向に延設することで、第5実施形態または第6実施形態と同等の効果を得ることができる。この構成ではロータ12を用いる構成に比較して、外周面13Bの面積をロータ12の表面積よりも大きく取りやすいため、より効果の高い空力性能を期待できる。また曲面に沿わせるなど、形状の自由度も大きくすることができる。
図10には本発明が適用された第8実施形態に係る車両用空力制御装置が示されている。図10に示すように、ロータ12(あるいはロータ112)の車体前方、車体後方の少なくとも一方に整流部材15が設けられ、ロータ12(あるいはロータ112)を車体前方または車体後方からの正面視でカバーしている。
この構成とすることで、ロータ12(あるいはロータ112)において空力的効果の発生する車体上下方向(または車幅方向)の面はそのまま走行風22に接触する一方、車体前方に設けられた整流部材15Fは走行風22に対する空気抵抗を低減し、車体後方に設けられた整流部材15Rはロータ12(あるいはロータ112)の車体後方で発生する伴流の影響を小さく抑えることができる。
これにより整流部材15F、15Rはそれぞれロータ12(あるいはロータ112)の空気抵抗を低減させることができ、走行に要するエネルギーの節約および風切り音の低減などの効果を得ることができる。
また、フロントエアダムやリアスポイラーなど既に車体意匠の一部となっている空力部材にロータ12(あるいはロータ112)を内蔵させることができるので、より車体10の意匠に高い自由度と、より高い空力性能をもたせることができる。
図11には本発明が適用された第9実施形態に係る車両用空力制御装置が示されている。図11に示すように、車体10にはロータ12(あるいはベルト13)の形状に合わせた凹部17が設けられ、ロータ12(あるいはベルト13)は凹部17に嵌り込むことで、車体10の車体上下方向(あるいは車幅方向、車体前後方向も含む)外側にロータ12(あるいはベルト13)が突出する量を低減させる構成とされている。
この構成とすることで、車体10から外側へロータ12が突出する量を少なくすることができ、意匠や車体寸法の点で自由度を高めることができる。
以上、実施形態を挙げて本発明の実施の形態を説明したが、これらの実施形態は一例であり、要旨を逸脱しない範囲内で種々変更して実施できる。また、本発明の権利範囲がこれらの実施形態に限定されず、本発明の要旨を逸脱しない範囲において種々なる態様で実施し得ることは言うまでもない。
すなわち、上記実施形態では車体10の外部表面を例に挙げたが、これに限定せず他の構成であっても本発明を適用することができる。例えばエアインテークからのエンジン冷却風流路やブレーキダクト内面などの空力に関しても本発明を適用することができる。
10 車体
11F 前輪
12 ロータ
12C 軸
13R シャフト
13 ベルト
14 突起
15 整流部材
16 連結手段
17 凹部
18 空隙
22A 走行風
22B 走行風
24 ダウンフォース
26 揚力
112 ロータ
11F 前輪
12 ロータ
12C 軸
13R シャフト
13 ベルト
14 突起
15 整流部材
16 連結手段
17 凹部
18 空隙
22A 走行風
22B 走行風
24 ダウンフォース
26 揚力
112 ロータ
Claims (6)
- 車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラと、
前記スポイラ内に、半径方向に移動可能に収容されると共に、対称形に複数個配置され、自重により径方向一方側に突出可能に支持された突出部と、を備えたことを特徴とする車両用空力制御装置。 - 車幅方向を軸方向として配置され、軸線回りに回転可能に支持された左右一対の円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた左右一対の無端ベルト形状のスポイラと、
前記左右一対の円柱形状のスポイラまたは前記左右一対の無端ベルト形状のスポイラにそれぞれ設けられ、各々独立して回転駆動させる回転手段と、
操舵角を検知し、前記回転手段を制御する制御手段と、
を備え、
前記制御手段は操舵角に基づいて操舵方向側の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラがダウンフォースを発生させるように回転駆動され、操舵方向反対側の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラは停止または逆回転させることを特徴とする車両用空力制御装置。 - 車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、
前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、
制動操作を検知し、前記回転手段を制御する制御手段と、
を備え、
前記制御手段は制動操作に基づいてダウンフォースを発生させるように前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動することを特徴とする車両用空力制御装置。 - 少なくとも車体前後に一対設けられ、車幅方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車幅方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、
前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、
車体のピッチングを検知し、前記回転手段を制御する制御手段と、
を備え、
前記制御手段は車体が前下がりの時には車体後方でダウンフォースを発生させるように車体後方の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動し、
車体が前上がりの時には車体前方でダウンフォースを発生させるように車体前方の前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを駆動することを特徴とする車両用空力制御装置。 - 少なくとも車幅方向に一対設けられ、車体上下方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車体上下方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、
前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、
前記回転手段を制御する制御手段と、
操舵角度を検知し、前記制御手段に伝達する舵角センサと、
車体前後端の横Gを検知し、前記制御手段に伝達する少なくとも前後一対の横Gセンサと、を備え、
前記制御手段は旋回中に前記舵角センサおよび前記横Gセンサからの情報に基づきオーバーステアあるいはアンダーステアを検知すると、オーバーステア時には車体前方をアウト側へ、車体後方をイン側へ付勢するモーメントを発生させ、アンダーステア時には車体前方をイン側へ、車体後方をアウト側へ付勢するモーメントを発生させるように前記回転手段を制御することを特徴とする車両用空力制御装置。 - 少なくとも車幅方向に一対設けられ、車体上下方向を軸方向として配置され、軸線回りに回転可能に支持された円柱形状のスポイラまたは、車体上下方向に延設された複数の回転軸に巻き掛けられた無端ベルト形状のスポイラと、
前記円柱形状のスポイラまたは前記無端ベルト形状のスポイラを回転駆動させる回転手段と、
前記回転手段を制御する制御手段と、
路面に対する車体のスリップアングルを検出し、前記制御手段に伝達するスリップアングルセンサと、を備え、
前記制御手段は前記スリップアングルが所定の角度より大きいとき、前記スリップアングルを解消するモーメントを発生させるように前記回転手段を制御することを特徴とする車両用空力制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008325936A JP2010143530A (ja) | 2008-12-22 | 2008-12-22 | 車両用空力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008325936A JP2010143530A (ja) | 2008-12-22 | 2008-12-22 | 車両用空力制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010143530A true JP2010143530A (ja) | 2010-07-01 |
Family
ID=42564396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008325936A Pending JP2010143530A (ja) | 2008-12-22 | 2008-12-22 | 車両用空力制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010143530A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013193596A (ja) * | 2012-03-21 | 2013-09-30 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2014136463A (ja) * | 2013-01-15 | 2014-07-28 | Toyota Motor Corp | 車両又は移動体の空力制御装置及び空力制御装置を備えた車両又は移動体 |
| FR3063270A1 (fr) * | 2017-02-24 | 2018-08-31 | Peugeot Citroen Automobiles Sa | Dispositif aerodynamique de plaquage au sol d''un vehicule automobile, comprenant un deflecteur d''air horizontal logeant un cylindre rotatif. |
| KR101984130B1 (ko) * | 2017-11-28 | 2019-05-30 | 공주대학교 산학협력단 | 공기층의 박리를 이용한 열차용 공기저항 감소장치 |
| US10443564B2 (en) | 2015-07-01 | 2019-10-15 | Challenergy Inc. | Magnus type thrust generating device |
| CN111216813A (zh) * | 2020-02-07 | 2020-06-02 | 石家庄铁道大学 | 赛车尾翼及赛车 |
| CN114162228A (zh) * | 2021-11-16 | 2022-03-11 | 上汽大众汽车有限公司 | 一种用于车辆空气动力学控制的主动式下扰流板系统及车辆 |
| US11447193B2 (en) * | 2019-06-10 | 2022-09-20 | GM Global Technology Operations LLC | Control of vehicle aerodynamic force for hydroplaning mitigation |
| JP2023514004A (ja) * | 2019-12-12 | 2023-04-05 | マグヌス フォース エルエルシー | 乗り物用の補助推進システム |
| US12365402B2 (en) | 2023-01-12 | 2025-07-22 | Honda Motor Co., Ltd. | Spinner assembly for a vehicle |
-
2008
- 2008-12-22 JP JP2008325936A patent/JP2010143530A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013193596A (ja) * | 2012-03-21 | 2013-09-30 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2014136463A (ja) * | 2013-01-15 | 2014-07-28 | Toyota Motor Corp | 車両又は移動体の空力制御装置及び空力制御装置を備えた車両又は移動体 |
| US10443564B2 (en) | 2015-07-01 | 2019-10-15 | Challenergy Inc. | Magnus type thrust generating device |
| FR3063270A1 (fr) * | 2017-02-24 | 2018-08-31 | Peugeot Citroen Automobiles Sa | Dispositif aerodynamique de plaquage au sol d''un vehicule automobile, comprenant un deflecteur d''air horizontal logeant un cylindre rotatif. |
| KR101984130B1 (ko) * | 2017-11-28 | 2019-05-30 | 공주대학교 산학협력단 | 공기층의 박리를 이용한 열차용 공기저항 감소장치 |
| US11447193B2 (en) * | 2019-06-10 | 2022-09-20 | GM Global Technology Operations LLC | Control of vehicle aerodynamic force for hydroplaning mitigation |
| JP2023514004A (ja) * | 2019-12-12 | 2023-04-05 | マグヌス フォース エルエルシー | 乗り物用の補助推進システム |
| JP7571983B2 (ja) | 2019-12-12 | 2024-10-23 | マグヌス フォース エルエルシー | 乗り物用の補助推進システム |
| CN111216813A (zh) * | 2020-02-07 | 2020-06-02 | 石家庄铁道大学 | 赛车尾翼及赛车 |
| CN114162228A (zh) * | 2021-11-16 | 2022-03-11 | 上汽大众汽车有限公司 | 一种用于车辆空气动力学控制的主动式下扰流板系统及车辆 |
| US12365402B2 (en) | 2023-01-12 | 2025-07-22 | Honda Motor Co., Ltd. | Spinner assembly for a vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010143530A (ja) | 車両用空力制御装置 | |
| JP4179348B2 (ja) | 走行装置 | |
| CN104097701B (zh) | 主动空气动力辅助控制的车辆稳定性控制方法及系统 | |
| CN103303367B (zh) | 一种四轮驱动电动车车身稳定控制方法 | |
| JP4179392B1 (ja) | 車両の旋回挙動制御装置 | |
| CN101618733A (zh) | 汽车前后轮主动转向控制系统 | |
| CN104925054A (zh) | 一种基于微分平坦的车辆稳定转向集成控制方法 | |
| CN107600197B (zh) | 用于机动车的主动水平舵 | |
| JP2009248746A (ja) | 車両用空力制御装置 | |
| JP4556775B2 (ja) | 車両用操舵装置 | |
| JP7037933B2 (ja) | 整流装置 | |
| CN112849126A (zh) | 车辆控制装置 | |
| JP6076727B2 (ja) | アライメント制御装置 | |
| JP5359351B2 (ja) | 挙動制御装置 | |
| JP5157306B2 (ja) | 車輪位置可変車両 | |
| JP2984724B2 (ja) | 電気自動車 | |
| CN119682564B (zh) | 抗横风的电动车辆控制方法、控制器和电动车辆 | |
| EP4200193B1 (en) | A method for controlling steering of a vehicle arrangement | |
| JP2006187047A (ja) | 4輪独立駆動車の駆動力制御装置 | |
| JP5389583B2 (ja) | 車両駆動制御システム | |
| JP2011161957A (ja) | 中央制御装置 | |
| JP2010247563A (ja) | 車両の駆動力制御装置 | |
| JP2014080084A (ja) | ハイブリッド自動車のローリング抑制方法 | |
| KR102615533B1 (ko) | 전기차용 전자식 차동 제한장치의 제어방법 | |
| JP5500012B2 (ja) | 車両制御装置および車両制御方法 |