第1の実施の形態.
<直接形交流電力変換装置の構成>
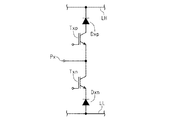
図1は直接形交流電力変換装置の概念的な構成の一例を示している。直接形交流電力変換装置は、入力端Pr,Ps,Ptと、電流形コンバータ1と、直流電源線LH,LLと、電圧形インバータ2と、出力端Pu,Pv,Pwとを備えている。
入力端Pr,Ps,Ptは例えば三相交流電源に接続されて三相交流電圧が印加される。
電流形コンバータ1はスイッチング素子Sxp,Sxn(但し、xはr,v,wを代表する。以下同様)を備えている。スイッチング素子Sxpは入力端Pxと直流電源線LHとの間に設けられている。スイッチング素子Sxnは入力端Pxと直流電源線LLとの間にそれぞれ設けられている。
スイッチング素子Sxp,Sxnはいずれも逆阻止能力を有している。図2はスイッチング素子Sxp,Sxnの一例を示している。スイッチング素子SxpはトランジスタTxp(例えば絶縁ゲートバイポーラトランジスタ)と、ダイオードDxpとを備えている。ダイオードDxpは直流電源線LL側にアノードを、直流電源線LH側にカソードをそれぞれ向けてトランジスタTxpと直列に接続されている。スイッチング素子SxnはトランジスタTxn(例えば絶縁ゲートバイポーラトランジスタ)と、ダイオードDxnとを備えている。ダイオードDxnは直流電源線LL側にアノードを、直流電源線LH側にカソードをそれぞれ向けてトランジスタTxnと直列に接続されている。ダイオードDxp,Dxnによって、スイッチング素子Sxp,Sxnはそれぞれ逆阻止能力を有する。
スイッチング素子Srp,Srn,Ssp,Ssn,Stp,Stnは台形状波形を信号波(以下、指令値とも呼ぶ)とするパルス幅制御でスイッチングされる。具体的には該信号波とキャリヤとの比較結果に基づくスイッチング信号SSrp,SSrn,SSsp,SSsn,SStp,SStnが入力されてそれぞれその導通/非導通が制御される。
電圧形インバータ2はスイッチング素子Syp,Syn(但し、yはu,v,wを代表する。以下、同様)を備えている。スイッチング素子Sypは出力端Pyと直流電源線LHとの間に設けられている。スイッチング素子Synは出力端Pyと直流電源線LLとの間にそれぞれ設けられている。
図3はスイッチング素子Syp,Synの一例を示している。スイッチング素子SypはトランジスタTyp(例えば絶縁ゲートバイポーラトランジスタ)と、ダイオードDypとを備えている。ダイオードDypは直流電源線LL側にアノードを、直流電源線LH側にカソードをそれぞれ向けてトランジスタTypと並列に接続されている。スイッチング素子SynはトランジスタTyn(例えば絶縁ゲートバイポーラトランジスタ)と、ダイオードDynとを備えている。ダイオードDynは直流電源線LL側にアノードを、直流電源線LH側にカソードをそれぞれ向けてトランジスタTynと並列に接続されている。
スイッチング素子Sup,Sun,Svp,Svn,Swp,Swnは例えば正弦波を信号波(以下、指令値とも呼ぶ)とするパルス幅制御でスイッチングされる。具体的には該信号波とキャリヤとの比較結果に基づくスイッチング信号SSrp,SSrn,SSsp,SSsn,SStp,SStnが入力されてそれぞれその導通/非導通が制御される。
出力端Pu,Pv,Pwには負荷(例えば三相モータ)が接続される。
<直接形交流電力変換装置の制御方法>
まず、電流形コンバータ1の制御方法について概説し、次に電圧形インバータ2の制御方法について概説し、次に電圧制御率(特許文献2における変調率の大きさに相当)について述べる。
電流形コンバータ1は、台形状波形を信号波とするパルス幅制御(PMW)でスイッチングさせることにより、入力端Pr,Ps,Ptの相互間に印加される線間電圧のうちいずれか2つを選択的に直流電源線LH,LLに印加する。台形状波形を信号波とするパルス幅制御の一例については後に詳述する。
例えば電流形コンバータ1は入力端Pr,Ps,Ptの相互間に印加される3つの線間電圧のうち、より大きい2つの線間電圧を選択的に交互に直流電源線LH,LLの間に印加する。以下、具体的なスイッチング素子Sxp,Sxnの制御方法の一例について概説する。なお、導通であると言及しない限り、スイッチング素子Sxp,Sxnは非導通である。
図4は入力端Pr,Ps,Ptのそれぞれに印加される相電圧Vr,Vs,Vtを示している。これらのいずれもが入力端Pr,Ps,Ptの相互間の線間電圧の最大値で規格化されている。図4を参照して、例えば位相角θが30度から90度の領域1では、線間電圧Vrt,Vstのいずれもが線間電圧Vrs以上である。よって、領域1では電流形コンバータ1は線間電圧Vrtと、線間電圧Vstとを交互に選択的に直流電源線LH,LLの間に印加する。より具体的には、電流形コンバータ1は、スイッチング素子Srp,Stnが導通するスイッチングパターン(このとき線間電圧Vrtを出力する)と、スイッチング素子Ssp,Stnが導通するスイッチングパターン(このとき線間電圧Vstを出力する)とを交互に選択に採る。
なお、この内容は、領域1において、最小相たるt相を基準相とし、当該基準相と、他の2つの相の何れか一方を選択して、これらの間の線間電圧を直流電源線LH,LLの間に出力している、とも把握できる。
他の領域においても、3つの線間電圧のうち、より大きい2つの線間電圧を直流電源線LH,LLの間に交互に選択的に印加する。例えば位相角θが200度から260度までの領域2について説明する。領域2においては、線間電圧Vrt,Vstの絶対値が線間電圧Vrsの絶対値以上である。よって、領域2においては線間電圧Vrt,Vstが交互に選択的に直流電源線LH,LLに出力される。より具体的にはスイッチング素子Srn,Stpが導通するスイッチングパターンと、スイッチング素子Ssn,Stpが導通するスイッチングパターンとを交互に選択的に採る。なお、この内容は、領域2において、最大相たるt相を基準相とし、当該基準相と、他の2つの相の何れか一方を選択して、これらの間の線間電圧を直流電源線LH,LLの間に出力している、とも把握できる。
電流形コンバータ1は上述した制御において、基準相に対して他の2つの相の何れか一方を選択する比率を適宜に設定することで、直流電圧Vdcを直流電源線LH,LLに出力する。図5はかかる直流電圧Vdcを説明するためのグラフを示している。図5については後に詳述する。
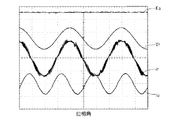
なお、入力端Pr,Ps,Ptに流れる線電流ir,is,itは正弦波に近いことが望ましく、この観点から上記比率が求められる。線電流ir,is,itが相電圧Vr,Vs,Vtと同位相の電流波形を呈するために、正弦波形状を呈する比率で基準相に対する2つの相を導通させる。かかる比率(以下、電流分配率と呼ぶ)が図6に示されている。電流分配率D1,D2は、キャリヤの一周期において、基準相以外で選択される二相の線電流が電流形コンバータ1を通流する期間の割合を示している。
電流分配率D1は、キャリヤの一周期において、基準相及び中間相のいずれでもない相が選択される期間の割合を示している。例えば領域1における位相角60度区間のうち始めの位相角30度区間においては当該相はr相であり、線電流irが通流する期間の割合を示す。キャリヤの一周期は相電圧の周期に対して非常に短いので、電流分配率D1は、キャリヤの一周期においてスイッチング素子Srp,Stnが導通している期間の割合であるといえる。
電流分配率D2とは、キャリヤの一周期において、中間相が選択される期間の割合を示す。例えば領域1の始めの位相角30度区間においては、中間相はs相であり、線電流isが通流する期間の割合を示す。言い換えれば、電流分配率D2は、キャリヤの一周期においてスイッチング素子Ssp,Stnが導通している期間の割合である。
図6に示す電流分配率D1,D2及びこれらの和たる電流分配率Dtotalは、120度の位相差を有して連続する正弦波の絶対値の波形を呈している。具体的には電流分配率D2は中間相の相電圧波形の絶対値と同一の形状を呈している。電流分配率D1は基準相が最大相であれば最小相の相電圧波形の絶対値と同一の形状を呈し、基準相が最小相であれば最大相の相電圧波形の絶対値と同一の形状を呈する。そして電流分配率Dtotalは基準相の相電圧波形の絶対値と同一の形状を呈している。但しこれらの振幅についてはこの限りではない。以下、代表して領域1の始めの30度区間を例に採って説明する。当該30度区間の始まりを0度とし、終わりを30度とする位相角θを導入する。電流分配率D1,D2、及び電流分配率D1,D2の和たる電流分配率Dtotalは次式で表される。
なお、電流分配率Dtotalは、キャリヤの一周期において、基準相が導通する、より正確には基準相に対応する線電流が通流する期間の割合を示している。
かかる電流分配率D1,D2を採用することによって、各相が正弦波形状に従って通流し、以って線電流ir,is,itを正弦波形状にすることができる。
しかしながら直流電圧Vdcを得るためには、基準相は位相角60度区間において常に導通状態である必要がある。例えば領域1の始めの位相角30度区間では、基準相たる最小相t相が導通状態(スイッチング素子Stnが導通状態)とする必要がある。よって、電流分配率D1,D2を、それぞれ基準相が導通する期間の割合たる電流分配率Dtotalで除算した電流分配率を採用する必要がある。かかる電流分配率D1,D2が次式で表されている。
但し、cosθin=√3max(|Vr|,|Vs|,|Vt|)であり、基準相がtそうであればcosθin=√3|Vt|となる。上述のように電流分配率Dtotalは基準相の相電圧波形の絶対値と同一の形状を呈しており、Dtotal=cosθinである。よって式(4)(5)から、電流分配率Dtotalは図7において1である。
かかる電流分配率D1,D2を採用することによって、直流電圧Vdcを得ることができる。なお図5において、基準相でも中間相でもない相と基準相との間の線間電圧を直流電圧E1で示し、基準相と中間相との間の線間電圧を直流電圧E2で示している。直流電源線LH,LLの間の直流電圧Vdcはこの直流電圧E1,E2をキャリヤ一周期の各々において繰り返し交互に採る。なお図5においては、キャリヤ周期で変動する様子を図示すると繁雑となるので、直流電圧Vdcは示されていない。なお、かかる電流分配率D1,D2による制御は、入力端Pr,Ps,Ptの相互間に印加される線間電圧のうち最大値をとる第1線間電圧(E1)と最大値及び最小値のいずれでもない第2線間電圧(E2)の内のいずれか1つを相補的に前記第1及び前記第2の直流電源線の間に印加している、と把握できる。
例えば領域1の始めの位相角30度区間において、直流電圧E2は基準相t相に対する中間相s相の線間電圧である。かかる直流電圧E2は線間電圧Vstと同一であるので、次式で表される。
例えば領域1の始めの位相角30度区間において、直流電圧E1は基準相t相に対する最大相r相の電圧である。かかる直流電圧E1は線間電圧Vrtと同一であるので、次式で表される。
図5においては、キャリヤの一周期内で直流電圧Vdcを平均した第1平均直流電圧Vdc1が示されている。第1平均直流電圧Vdc1は、キャリヤの一周期内で出力される直流電圧E1,E2に対し、それぞれ対応する電流分配率D1,D2を乗算し、その結果を加算することで求められる。例えば領域1における始めの30度区間において、第1平均直流電圧Vdc1は次式で表される。
以上のように、上記コンバータ制御によって、基準相に対する中間相の直流電圧2と、基準相に対する他の相の直流電圧E1のいずれか一方を採る直流電圧Vdcが直流電源線LH,LLの間に印加される。なお、他の位相角においても同じ計算結果が得られる。よって、第1平均直流電圧Vdc1は式(8)に示すように脈動する。かかる脈動は、電流分配率D1,D2同士の比を保ちつつ、電流分配率Dtotalを1にしたことに起因する(式(3)〜(5)参照)。そしてその脈動は三相交流の相電圧Vr,Vs,Vtの絶対値の最も大きい値であるcosθinによってもたらされる。
次に、電圧形インバータ2の制御について概説する。なお、実際は線電流ir,is,itの波形を整える目的で、以下に述べる制御よりも複雑な制御を行うことが望ましい。この内容については後に概説する。
電圧形インバータ2は直流電源線LH,LLの間の直流電圧Vdcを三相交流電圧に変換して出力端Pu,Pv,Pwの相互間に印加する。より具体的には、スイッチング素子Syp,Synを相補的に導通させ、8つのスイッチングパターンを選択して、その各々に対応した電圧ベクトルV0〜V7を採用する。そして、各電圧ベクトルV0〜V7を採用する順序及びその出力期間を制御して、直流電圧Vdcを三相交流電圧に変換して出力端Pu,Pv,Pwに印加している。
このときキャリヤの一周期内で平均すると(1/cosθin)に比例する直流電圧Vdcの脈流を補正すべく、直流電圧Vdcが一定であると仮定して算出した各電圧ベクトルの出力期間にcosθinを乗じる。例えば、直流電圧Vdcが一定と仮定した場合に、キャリヤの一周期内で電圧ベクトルV0,V4,V6をそれぞれ期間T−t40−t60,t40,t60(但し、Tはキャリヤ周期)にわたって出力する場合について説明する。上記補正によって、電圧ベクトルV0,V4,V6の期間t0,t4,t6は次式で表される。
式(9)によって、キャリヤの一周期で平均した直流電圧Vdc(第1平均直流電圧Vdc1)の脈動分を補正している。これによって脈流成分の影響を除いて電圧ベクトルを出力できる。
次に、電圧制御率Ksを導入して電圧形インバータ2における指令値(キャリヤと比較される信号波)を求める場合に、当該電圧制御率Ksの算出方法について述べる。なお、実際には電圧制御率Ksと制御位相角φに基づいて指令値が算出される。当該算出の方法は公知であるので、詳細な説明は省略する。
電圧形インバータ2が出力する線間電圧の実効値Viは次式で表される。
ここで、Vd*,Vq*はそれぞれd軸、q軸における電圧形インバータ2の出力電圧の指令値を示す。
電圧制御率Ksは線間電圧の実効値Viを用いて次式で表される。
ここで、Vdc2は直流電圧Vdcの最大値の√3/2倍(以下、等価直流電圧Vdc2と呼ぶ)を示している。なお、図6を参照して、等価直流電圧Vdc2は、直流電圧E1の波高値の√3/2とも把握できる。√3/2という数値については後に述べる。
また制御位相角φは次式で表される。
図8は式(10)〜式(12)で表された電圧制御率Ksと制御位相角φとを用いて制御を行った場合の、電圧制御率Ks、相電圧Vr,線電流ir,出力端Puを流れる線電流iuを示している。図9は線電流irに含まれる高調波成分を示している。
比較のために、特許文献2で示される変調率を、本直接形電力変換装置に適用した場合についても説明する。特許文献2にかかる電圧制御率Ks’は次式で表される。
図10は式(13)で示される電圧制御率Ks’と制御位相角φを用いて制御を行った場合の、電圧制御率Ks’、相電圧Vr,線電流ir,出力端Puを流れる線電流iuを示している。図11は線電流irに含まれる高調波成分を示している。
cosθin=√3max(|Vr|,|Vs|,|Vt|)より、cosθinは入力端Pr,Ps,Ptに印加される三相交流電圧の周期の6分の1の周期を有する。電圧制御率Ks’はcosθinを因数に有する(式8、13を参照)ことから、線電流irには6次調波成分が含まれる。よって、キャリヤの一周期で平均した線電流に含まれる高調波成分ir’は次式で表される。
但し、ILは線電流irの振幅、ωsは入力端Pr,Ps,Ptに印加される三相交流電圧の角速度、tは時間である。なお、ここでは直接形交流電力変換装置の入力電圧(入力端Pr,Ps,Ptに印加される電圧)と、出力電圧(出力端Pu,Pv,Pwに印加される電圧)は等しいと仮定している。
式(14)を三角関数の公式に則って変形すると、次式が導かれる。
式(15)から分かるように、線電流に含まれる高調波成分ir’には5次と7次の高調波成分が含まれる。これが図11に示されている。
そして、図9と図11との比較から容易に理解できるように、本制御方法によれば、線電流irに含まれる高調波成分(特に5次と7次の高調波成分)を低減することができる。言い換えれば、脈流成分の影響を除去した適切な電流が電流形コンバータ1に入力される。これは式(10)及び式(11)から理解できるように、電圧制御率Ksがcosθinを含まないからである。
次に電圧形インバータ3の出力電圧について述べる。上述した制御方法に従えば、電圧形インバータ2が出力する電圧Voは、電圧制御率Ksと、脈動成分cosθinと、第1平均直流電圧Vdc1との積で示される(Vo=Ks・cosθin・Vdc1)。第1平均直流電圧Vdc1は(1/cosθin)の因子を有するものの、これとcosθinが積算されるので、出力電圧Voはcosθinの因子を有さない。具体的には、式(8)を考慮して、出力電圧Vo=Ks・√3/2となる。但し、本実施の形態では入力端Pr,Ps,Ptの相互間の線間電圧の最大値を1に規格化しているので、実際には出力電圧Voは、直流電圧E1の波高値(最大値)の√3/2に相当する直流電圧と、電圧制御率の積算で導出される、と把握できる。また、従来の間接形インバータにおける出力電圧はVo’=Ks’’・Vdc’で表されることに鑑みると、上述した制御方法は、直流電圧E1の波高値の√3/2に相当する一定の直流電圧を用いてで電圧形インバータ2を制御していることと等価である。
なお、この所定値√3/2は第1平均直流電圧Vdc1に対し、三相交流の相電圧Vr,Vs,Vtの絶対値の最も大きい値であるcosθinを乗じて得られる値である。
以上のようにして、電圧制御率Ksとして等価的に一定な直流電圧(上述した例ではVdc2)を用い、電圧制御率Ksと、第1平均直流電圧Vdcの脈流補正を行うための、cosθinとに基づいて制御を行うことで、電圧形インバータ2は脈流成分の影響を除去した適切な電圧を出力できることが分かる。
また、特許文献2に示された制御方法を変更することなく、式(11)にかかる電圧制御率Ksを導入しているので、従来の制御構成をそのまま適用することができる。よって、製造コストや開発コストを低減できる。
続いて、上記制御方法を実現する制御部の一例を説明する。
<制御部の構成の一例>
図12は、上述した制御を行う制御部の具体的な内部構成の概念的な一例を示す。制御部100は、等価直流電圧検出部10と、コンバータ制御部20と、インバータ制御部30と、変調率算出部40と、センサレスベクトル制御部50とを備えている。
等価直流電圧検出部10は直流電圧検出部11を備えている。直流電圧検出部11は直流電圧Vdcの最大値を検出し、これを√3/2倍した等価直流電圧Vdc2を出力する。
コンバータ制御部20は、線間電圧Vrt(特にその位相角θ)を入力し、スイッチング信号SSrp,SSsp,SStp,SSrn,SSsn,SStnを出力する。スイッチング信号SSrp,SSsp,SStp,SSrn,SSsn,SStnの活性/非活性により、それぞれスイッチング素子Srp,Ssp,Stp,Srn,Ssn,Stnの各々が導通/非導通する。
インバータ制御部30は、位相角θと、電圧制御率Ksと、制御位相角φと、モータの回転位置を示す磁束位相角φ’とを入力し、スイッチング信号SSup,SSvp,SSwp,SSun,SSvn,SSwnを出力する。スイッチング信号SSup,SSvp,SSwp,SSun,SSvn,SSwnの活性/非活性により、それぞれスイッチング素子Sup,Svp,Swp,Sun,Svn,Swnの各々が導通/非導通する。
コンバータ制御部20は、電源位相検出部21と、台形状電圧指令生成部22と、比較器23と、電流形ゲート論理変換部24とを有する。これらの動作は特許文献1で公知な技術であるので詳細な説明は省略するが、概略は以下の通りである。
特許文献1において示されていたとおり、電流と電圧との双対性から、キャリヤと比較されるべき電流形コンバータ1の指令値として、仮想的な電圧形コンバータの相電圧指令Vr*,Vs*,Vt*を採用する。ここでは相電圧指令Vr*,Vs*,Vt*とキャリヤとの比較を行って仮想的な電圧形コンバータについてのスイッチング信号を求め、これを変換して電流形コンバータ1についてのスイッチング信号を得る。
電源位相検出部21は例えば線間電圧Vrsを検出して、入力端Pr,Ps,Ptに印加される三相交流電圧の位相角θを検出し、台形状電圧指令生成部22に出力する。
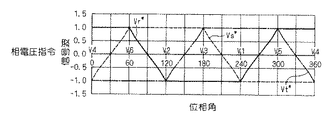
台形状電圧指令生成部22は受け取った位相角θと、例えば所定のテーブルとに基づいて、相電圧指令Vr*,Vs*,Vt*を生成する。相電圧指令Vr*,Vs*,Vt*は360度の周期を有し互いに120度ずれている。そしていずれもが例えば120度区間の平坦領域の一対と、平坦領域の一対を繋ぐ60度区間の傾斜領域からなる台形状の形状を有している。例えば傾斜領域はその振幅を正規化して±√3・tan(θ2)で示される(θ2は相電圧Vrの位相を基準として相毎に定まる位相であって−π/6≦θ2≦π/6)。かかる相電圧指令Vr*,Vs*,Vt*が図13に示されている。
比較器23は、キャリヤCと相電圧指令Vr*,Vs*,Vt*とを比較した結果を出力し、これに基づいて電流形ゲート論理変換部24がスイッチング信号SSrp,SSsp,SStp,SSrn,SSsn,SStnを生成する。この生成について以下に述べる。
前掲した非特許文献1は、電圧形インバータの相電圧と電流形インバータの相電流との双対性、及び電圧形インバータの線間電圧と電流形インバータの相電流との双対性に鑑みて、線電流指令値に基づくスイッチングと相電流指令値に基づくスイッチングとの対応関係について教示している。
図14はここで検討する仮想的なインバータの構成を示す回路図である。当該インバータは、電流形コンバータ1のスイッチングについて検討するためのものであり、電圧形インバータ2とは直接には関係ないので、三相交流についてa相、b相、c相との名称を採用する。当該インバータはa相のハイアーム側にスイッチ素子Qapを、ローアーム側にスイッチ素子Qanを、それぞれ有している。同様にして、b相においてスイッチ素子Qbp,Qbnを、c相においてスイッチ素子Qcp,Qcnを、それぞれ有している。
a相の線電流iaは、a相−c相間の相電流icaとb相−a相間の相電流ibaとの差で求まるため、これらの一対の相電流を流すスイッチングを行う場合のみ、a相電流が流れる。他の相の線電流についても同様である。そこで、相電流ijkが上アーム側のスイッチ素子に流れるか否かを記号Sjkで、下アーム側のスイッチ素子に流れるか否かを記号SjkBで表すことにする。ここで記号j,kは相互に異なりつつも記号a,b,cを代表し、記号Sjk,SjkBが二値論理“1”/“0”をとることで、相電流ijkが「流れる」/「流れない」を示すこととする。
インバータが相電圧指令とキャリヤとの比較に基づいて線電流を流すときに、ハイアーム側のスイッチ素子Qjp、ローアーム側のスイッチ素子Qjnの導通/非導通を制御するスイッチ指令を、それぞれ記号Sj+,Sj-で示すと、非特許文献1に示す内容は次の変換式で示される:Sa+=Sac・SbaB,Sb+=Sba・ScbB,Sc+=Scb・SacB,Sa-=Sba・SacB,Sb-=Scb・SbaB,Sc-=Sac・ScbB。
ここで更に、電圧形インバータの相電圧と電流形インバータの相電流との双対性に鑑みれば、上記の各式の右辺の論理値は、電圧形インバータでの相電圧とキャリヤとの比較結果として得られることが分かる。非特許文献1によれば、相電流ijkの指令値が相電圧Vjの指令値と対応する。よって記号Sjkは相電圧指令Vj*とキャリヤとの比較によってスイッチ素子Qjpを導通させる論理と一致し、記号SjkBは相電圧指令Vj*とキャリヤとの比較によってスイッチ素子Qjnを導通させる論理と一致する。
記号SbaBは相電圧指令Vbとキャリヤとの比較によってスイッチ素子Qap,Qbpをそれぞれ導通/非導通させる論理と一致し、記号Sbaは相電圧指令Vbとキャリヤとの比較によってスイッチ素子Qbp,Qapをそれぞれ導通/非導通させる論理と一致する。より具体的には、相電圧指令Vbがキャリヤ以下の場合にはスイッチ素子Sapを導通させ、以上の場合にはスイッチ素子Qbpを導通させる。そして記号Sa+、Sb+は線電流を流すときにそれぞれスイッチ素子Qap,Qbpを導通させる期間を示す。
今、上記相電圧指令Vr*,Vs*,Vt*を電圧指令Va*,Vb*,Vc*と読み替えて、これらが位相角0〜60度にある場合を説明する。電圧指令Va*,Vc*はそれぞれ値1,−1を採るので、Sac=1,SacB=0,Scb=0,ScbB=1となる。これにより、Sa+=SbaB,Sb+=Sba,Sc+=Sa-=Sb-=0となる。
換言すれば、a相,b相,c相をそれぞれr相、s相、t相と読み替えて、相電圧指令Vs*がキャリヤC以下の場合にはスイッチング素子Srpが導通し、キャリヤC以上の場合にはスイッチング素子Sspが導通する。キャリヤCの最小値が0であることに鑑みれば、電圧指令信号Vsの値がスイッチ素子Srpを導通させる期間に相当する。
電流ベクトルと電圧ベクトルとの間には30度の位相差が生じることに鑑みると、相電圧指令Vs*の値は、位相角θが30度から60度の領域で電流分配率D2に相当する。これは電流形コンバータ1においてスイッチング素子Srp,Stnが導通するスイッチングパターンと,スイッチング素子Ssp,Stnが導通するスイッチングパターンとを値D1,D2の比に比例する期間で交互に切り替えるタイミングを規定する。他の位相角においても同様に、電圧指令Vr*,Vt*の値についても上記の説明が妥当する。
図12に戻り、上述のようにして決定される相電圧指令Vr*,Vs*,Vt*とキャリヤCとの比較によって得られた結果は、比較器23から電流形ゲート論理変換部24へと与えられる。そして上の変換式で示された変換式に則った変換が行われることにより、スイッチング信号SSrp,SSsp,SStp,SSrn,SSsn,SStnが求められる。
キャリヤCを生成するキャリヤ生成部25はコンバータ制御部20に設けられてもよいし、次に説明するインバータ制御部30に設けられてもよいし、両者のいずれに属すると把握してもよい。
インバータ制御部30は、脈流算出部31と、出力電圧指令生成部32と、中間相検出部33と、指令値補正部34,35と、比較器36,37と、論理演算部38とを有する。インバータ制御部30の動作も特許文献1で公知であるので、簡単な説明に留める。
特許文献1に示されたとおり、線電流ir,is,itの波形を正弦波に近づけるべく、電圧形インバータ2は、電流形コンバータ1側で出力される2つの線間電圧の期間の各々において、その電流分配率D1,D2に応じて各電圧ベクトルを採用する。例えば図4に示す領域1においてキャリヤの一周期内に、電圧形インバータ2が電圧ベクトルV0,V4,V6をそれぞれ期間t0,t4,t6にわたって採用する場合について説明する。電流形コンバータ1が線間電圧Vrtを出力している期間に、電圧形インバータ2は電圧ベクトルV0,V4,V6をそれぞれ期間D1・t0,D1・t4,D1・t6に渡って出力する。そして電流形コンバータ1が線間電圧Vstを出力している期間に、電圧形インバータ2は電圧ベクトルV0,V4,V6をそれぞれ期間D2・t0,D2・t4,D2・t6に渡って採用する。
中間相検出部33は、相電圧指令Vr*,Vs*,Vt*のうち、いずれがいわゆる中間相に相当するかを判断する。例えば位相角θが30度から60度の領域においては相電圧指令Vs*が相当する。そして相電圧指令Vs*の値に鑑み、比D1:D2(=Dtotal−D1=1−D1)が決定され、値D1,D2が指令値補正部34,35に与えられる。
中間相検出部33はインバータ制御部30に設けられてもよいし、先に説明したコンバータ制御部20に設けられてもよいし、両者のいずれに属すると把握してもよい。
脈流算出部31は電源位相検出部21から位相角θを受け取ってcosθinを出力する。
出力電圧指令生成部32は、脈流算出部31から受け取ったcosθinと、変調率算出部40から受け取った電圧制御率Ksと、制御位相角φと、センサレスベクトル制御部50から受け取った磁束位相角φ’とに基づいて、電圧形インバータ2の相電圧指令値Vu*,Vv*,Vw*を生成する。具体的には、電圧制御率Ksと、制御位相角φと、磁束位相角φ’とに基づいて公知の技術によって生成した相電圧指令値にcosθinを乗じて電圧指令Vu*,Vv*,Vw*を生成する。なお、各電圧ベクトルの出力期間は相電圧指令Vr*,Vs*,Vt*とキャリヤCとの比較によって決定されるので、相電圧指令値Vu*,Vv*,Vw*にcosθinを乗じることによって、間接的に式(9)に表現された補正を行うことができる。
指令値補正部34,35は、電圧指令値Vu*,Vv*,Vw*と、電流分配率(以下、補正値とも呼ぶ)D1,D2とに基づいて、電圧形インバータ2の転流のためにキャリヤCと比較すべき値を生成する。相電圧指令Vs*が中間相である場合を例に採れば、電圧指令値Vu*,Vv*,Vw*に基づいて値d0,d4,d6(=1−d0−d4)を計算し、これと補正値D1,D2とに基づいて、値D1(1−d0−d4),D2(1−d0),D1+D2・d0,D1+D2(d0+d4)を生成する。また値0,D1+D2も出力する。これらの値は比較器36,37において比較され、その結果が論理演算部によって演算される。そして論理演算部38は比較器36,37における比較結果に基づいてスイッチング信号SSup,SSvp,SSwp,SSun,SSvn,SSwnを生成する。
変調率算出部40は、等価直流電圧Vdc2と、d軸電圧指令Vd*とq軸電圧指令Vq*とを受け取って、式(10)〜式(12)に基づいて電圧制御率Ksと、制御位相角φとを算出し、これらを出力電圧指令生成部32に出力する。
センサレスベクトル制御部50は、出力端Pu,Pv,Pwを流れる線電流iu,iv,iwからモータの回転数ωや磁束位相角φ’を算出し、これと外部から入力される回転数指令ω*とデューティとに基づいてd軸電圧指令Vd*とq軸電圧指令Vq*とを生成する。
第2の実施の形態.
第1の実施の形態においては、直流電圧Vdcの最大値を検出し、これを√3/2倍した等価直流電圧Vdc2を用いて電圧制御率Ksを演算していた。直流電圧VdcはキャリヤCの一周期という短い期間に直流電圧E1,E2を交互に採るため、その最大値を精度よく検出することはノイズの観点から困難であった。本第2の実施の形態にかかる制御方法は精度よく直流電圧Vdcの最大値を得て、精度のよい等価直流電圧Vdc2を得ることを目的とする。
キャリヤ周期内で平均した第1平均直流電圧Vdc1は式(18)で表される。第1平均直流電圧Vdc1を位相角30度の区間(例えば位相角θが0度から30度)で積分すると、その結果たる第2平均直流電圧Vdc3は次式で表される。
直流電圧Vdcの最大値は直流電圧E1の最大値、即ち線間電圧の最大値と等しい。上述した式はいずれも線間電圧の最大値で規格化しているので、直流電圧Vdcの最大値は1である。よって、直流電圧Vdcの最大値Vdc_maxは次式で表すことができる。
従って、位相角30度の区間(例えば位相角θ1が0度から30度)に渡って直流電圧Vdcを平均した第2平均直流電圧Vdc3を検出し、式(17)から直流電圧Vdcの最大値Vdc_maxを求めることができる。
よって、直流電圧Vdcの最大値Vdc_maxが直流電圧Vdcを平均した第2平均直流電圧Vdc3を用いて算出されているので、ノイズの影響を低減して直流電圧Vdc最大値Vdc_maxを得ることができる。ひいては精度よく等価直流電圧Vdc2を得ることができる。
図15はかかる制御を行う制御部の具体的な内部構成の一例を示している。図12に示す制御部と比較して、等価直流電圧検出部10が相違している。等価直流電圧検出部10はフィルタ12と、振幅補正部13とを備えている。
フィルタ12には直流電圧Vdcが入力される。フィルタ12は直流電圧Vdcをフィルタリングして例えば30度の区間に渡って直流電圧Vdcを平均化し、これを第2平均直流電圧Vdc2として出力する。かかるフィルタ12は例えば一次フィルタによって実現することができる。
振幅補正部13は第2平均直流電圧Vdc3を受け取って、式(17)より直流電圧Vdcの最大値Vdc_maxを算出し、これを√3/2倍して等価直流電圧Vdc2を変調率算出部40に出力する。
第3の実施の形態.
第3の実施の形態にかかる制御方法では、式(16)に示す第1平均直流電圧Vdc1を検出し、式(17)から、これを位相角において30度の区間で平均して第2平均直流電圧Vdc3を検出する。
第1平均直流電圧Vdc1を求める期間の基準であるキャリヤは例えば数kHz〜数十kHzである。第2平均直流電圧Vdc3を求める期間の基準である三相交流電圧の周波数の12倍は、例えば日本では600Hz(=50Hz×12)あるいは720Hz(60Hz×12)である。よって、第2平均直流電圧Vdc3に比べて第1平均直流電圧Vdc1は10倍以上短い期間で検出できる。
第3の実施の形態にかかる制御方法では、一旦、第1平均直流電圧Vdc1を検出しているので、これを例えば瞬停の判断基準として用いることができる。第1平均直流電圧Vdc1と基準値Vrefよりも低ければ、入力端Pr,Ps,Ptへの三相交流電圧の供給が遮断されたと判断する。
よって、例えば第2平均直流電圧Vdc3を用いて瞬停を判断する場合に比べて、実際に瞬停が生じてから瞬停を検出するまでの時間を短縮できる。
図16はかかる制御を実行する制御部の内部構成の概念的な一例を示している。図12,15に示す制御部と比較して、等価直流電圧検出部10が相違している。等価直流電圧検出部10は、キャリヤフィルタ14と、比較器15と、脈流フィルタ16と、振幅補正部13とを備えている。
キャリヤフィルタ14には直流電圧Vdcが入力される。キャリヤフィルタ14は直流電圧Vdcをフィルタリングしてキャリヤの一周期内で直流電圧Vdcを平均し、これを第1平均直流電圧Vdc1として出力する。かかるキャリヤフィルタ14は例えば公知の一次フィルタで構成することができる。なお、位相遅れなくキャリヤ成分(キャリヤの一周期で直流電圧E1,E2を採ることに起因する成分)をノイズなく除去して、電源周波数の6倍の高調波成分を含む第1平均直流電圧Vdc1を得ることは困難である。しかしながら、瞬停を検出するために第1平均直流電圧Vdc1を用いる場合であれば、第1平均直流電圧Vdc1の検出精度の要求を高める必要がない。
脈流フィルタ16には第1平均直流電圧Vdc1が入力される。脈流フィルタ16は第1平均直流電圧Vdc1をフィルタリングして、三相交流電圧の周期の12分の1の期間内で第1平均直流電圧Vdcを平均し、これを第2平均直流電圧Vdc3として出力する。
振幅補正部13は第2平均直流電圧Vdc3を受け取って、式(17)より直流電圧Vdcの最大値Vdc_maxを算出して、これを√3/2倍して等価直流電圧Vdc2を変調率算出部40に出力する。
比較器15には第1平均直流電圧Vdc1と、例えば予め設定された基準値Vrefとが入力される。比較器15は第1平均直流電圧Vdc1が基準値Vrefよりも小さければ、例えば瞬停が生じたと判断する。
変形例.
第1乃至第3の実施の形態では、電圧形インバータ2において、直流電圧Vdcが一定であると仮定して算出された各電圧ベクトルの出力期間に対して、cosθinを乗じて直流電圧Vdcの脈動分を補正していた。変形例にかかる制御方法では電圧形インバータ2において当該補正を行わない。そして、電圧制御率として電圧制御率Ksを採用する。
以下、第1の実施の形態にかかる制御方法における出力電圧と、変形例にかかる制御方法における出力電圧とについて、例えば電圧制御率Ksを1に指定し、電圧形インバータ2が電圧ベクトルV4を出力する場合を例に挙げて述べる。
まず、第1の実施の形態にかかる制御方法について考える。キャリヤの一周期に対する電圧ベクトルV4を出力する期間の割合(時比率)dは式(9)に鑑みて次式で表される。
よって、電圧ベクトルV4の大きさVは次式で表される。
次に変形例にかかる制御方法について考える。式(18)において電圧制御率Ksを電圧制御率Ks’に置き換え、電圧ベクトルV4の出力期間t4をt40に置き換えると、時比率d’は次式で表される。
式(11)およびKs=1に相当するように√(Vd*2+Vq*2)=√3/(2√2)とすると、
よって、電圧ベクトルV4の大きさV’は次式で表される。
以上のように、変形例にかかる制御による電圧形インバータ2の電圧ベクトルの大きさと、第1の実施の形態にかかる制御による電圧形インバータ2の電圧ベクトルの大きさが等しい。よって、変形例にかかる制御によっても適切に出力電圧を出力することができる。
但し、電圧制御率Ks’は第1平均直流電圧Vdc1を含んでいる。直流電圧Vdcから電源周波数の6倍の高調波を含む第1平均直流電圧Vdc1を位相遅れなく精度よく検出するためには、2桁以上のキャリヤ周波数が必要である。5〜10kHz程度のキャリヤ周波数では精度よく第1平均直流電圧を検出することは困難である。少なくとも一次フィルタを用いて検出することは難しい。
一方、第2及び第3の実施の形態にかかる制御方法であれば、キャリヤ周波数の10分の一程度の電源周波数の12分の1の周波数で直流電圧Vdcを平均した第2平均直流電圧Vdc_maxを用いて電圧制御率Ksを得ている。よって、例えば一次フィルタ程度を用いて電圧制御率Ksを得ることができるので、製造コストを低減することができる。