JP2010071706A - 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 - Google Patents
画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 Download PDFInfo
- Publication number
- JP2010071706A JP2010071706A JP2008237357A JP2008237357A JP2010071706A JP 2010071706 A JP2010071706 A JP 2010071706A JP 2008237357 A JP2008237357 A JP 2008237357A JP 2008237357 A JP2008237357 A JP 2008237357A JP 2010071706 A JP2010071706 A JP 2010071706A
- Authority
- JP
- Japan
- Prior art keywords
- pantograph
- image
- vertical acceleration
- line sensor
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L5/00—Current collectors for power supply lines of electrically-propelled vehicles
- B60L5/18—Current collectors for power supply lines of electrically-propelled vehicles using bow-type collectors in contact with trolley wire
- B60L5/22—Supporting means for the contact bow
- B60L5/26—Half pantographs, e.g. using counter rocking beams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60M—POWER SUPPLY LINES, AND DEVICES ALONG RAILS, FOR ELECTRICALLY- PROPELLED VEHICLES
- B60M1/00—Power supply lines for contact with collector on vehicle
- B60M1/12—Trolley lines; Accessories therefor
- B60M1/28—Manufacturing or repairing trolley lines
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
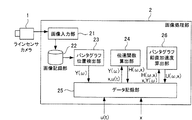
【解決手段】車両に取り付けたラインセンサカメラ1でパンタグラフを撮像し、画像処理部2により撮像された画像に基づいてパンタグラフの鉛直加速度を測定する装置において、画像処理部2に、ラインセンサカメラ1によって撮像したパンタグラフの測定点における画像を入力する画像入力部21と、入力された画像からなるラインセンサ画像に対して画像処理を施すことによってラインセンサ画像上のパンタグラフの位置を求めるパンタグラフ位置検出部23と、ラインセンサ画像上のパンタグラフの位置および予め設定する伝達関数およびパンタグラフの偏位位置に基づきパンタグラフのトロリ線との接触点における鉛直加速度を算出するパンタグラフ鉛直加速度算出部24とを設けるようにした。
【選択図】図2
Description
H(ω,x)=Y(ω)/U(ω,x) ・・・(1)
ただし、Y(ω)、H(ω,x)、U(ω,x)はラインセンサ画像上のパンタグラフ31の鉛直加速度y(t)、伝達関数h(t)、実際のパンタグラフ31の鉛直加速度u(t)のフーリエ変換を表す。
Y(ω)=H(ω,x)・U(ω,x) ・・・(3)
この(3)式から上記(1)式が得られる。
U(ω,x)=Y(ω)/H(ω,x) ・・・(4)
これにより、トロリ線4(加振点Pw)の偏位位置における鉛直加速度u(t)が得られる(ステップS6)。
2 画像処理部
3 車両
4 トロリ線
21 画像入力部
22 画像記録部
23 パンタグラフ位置検出手段
24 伝達関数算出部
25 パンタグラフ鉛直加速度算出部
26 データ記録部
31 パンタグラフ
Claims (5)
- 車両に取り付けたラインセンサカメラでパンタグラフを撮像し、画像処理部により撮像された画像に基づいてパンタグラフの鉛直加速度を測定する装置であって、
前記画像処理部が、前記ラインセンサカメラによって撮像した前記パンタグラフの測定点における画像を入力する画像入力手段と、入力された前記画像からなるラインセンサ画像に対して画像処理を施すことによって前記ラインセンサ画像上の前記パンタグラフの位置を求めるパンタグラフ位置検出手段と、前記ラインセンサ画像上のパンタグラフの位置および予め設定する伝達関数および前記パンタグラフの偏位位置に基づき前記パンタグラフのトロリ線との接触点における鉛直加速度を算出するパンタグラフ鉛直加速度算出手段とを備える
ことを特徴とする画像処理によるパンタグラフ鉛直加速度測定装置。 - 前記画像処理部が、加振点において前記パンタグラフに鉛直方向の振動を与えたときの前記ラインセンサ画像上の前記パンタグラフの位置から導出した鉛直加速度と前記加振点における前記パンタグラフの鉛直加速度とに基づいて前記伝達関数を算出する伝達関数算出手段を備える
ことを特徴とする請求項1記載の画像処理によるパンタグラフ鉛直加速度測定装置。 - 前記ラインセンサカメラが雲台上に設置されて向きを調整可能に構成されている
ことを特徴とする請求項1または請求項2記載の画像処理によるパンタグラフ鉛直加速度測定装置。 - 車両に取り付けたラインセンサカメラでパンタグラフを撮像し、画像処理部により撮像された画像に基づいてパンタグラフの鉛直加速度を測定する方法であって、
前記ラインセンサカメラから画像データを入力し、
入力された前記画像データからなるラインセンサ画像と予め登録しておいたパタンマッチ用モデルとを比較してラインセンサ画像上の測定点におけるパンタグラフの位置を検出し、
検出されたパンタグラフのラインセンサ画像上の位置に基づいて求めた鉛直加速度と、予め求めた伝達関数と、前記パンタグラフの偏位位置とから前記パンタグラフのトロリ線との接触点における鉛直加速度を算出する
ことを特徴とする画像処理によるパンタグラフ鉛直加速度測定方法。 - 前記パンタグラフに対して加振点に鉛直方向の振動を与えると同時に、前記ラインセンサカメラによって前記パンタグラフの測定点を撮像し、
前記加振点におけるパンタグラフの鉛直加速度と撮像された画像からなるラインセンサ画像上の前記測定点におけるパンタグラフの鉛直加速度とから前記伝達関数を算出する
ことを特徴とする請求項4記載の画像処理によるパンタグラフ鉛直加速度測定方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008237357A JP5151845B2 (ja) | 2008-09-17 | 2008-09-17 | 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 |
| RU2011115064/28A RU2459213C1 (ru) | 2008-09-17 | 2009-09-11 | Устройство и способ для измерения вертикального ускорения пантографа посредством обработки изображения |
| PCT/JP2009/065950 WO2010032695A1 (ja) | 2008-09-17 | 2009-09-11 | 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 |
| EP09814540.2A EP2325656B1 (en) | 2008-09-17 | 2009-09-11 | Device and method for measuring vertical acceleration of pantograph by image processing |
| CN2009801364657A CN102159954B (zh) | 2008-09-17 | 2009-09-11 | 基于图像处理的比例绘图器的铅垂加速度测定装置以及测定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008237357A JP5151845B2 (ja) | 2008-09-17 | 2008-09-17 | 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010071706A true JP2010071706A (ja) | 2010-04-02 |
| JP5151845B2 JP5151845B2 (ja) | 2013-02-27 |
Family
ID=42039519
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008237357A Active JP5151845B2 (ja) | 2008-09-17 | 2008-09-17 | 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2325656B1 (ja) |
| JP (1) | JP5151845B2 (ja) |
| CN (1) | CN102159954B (ja) |
| RU (1) | RU2459213C1 (ja) |
| WO (1) | WO2010032695A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130282211A1 (en) * | 2012-04-22 | 2013-10-24 | Caterpillar, Inc. | Trolley Driven Machine Record and Playback Automation |
| CN111681265A (zh) * | 2020-06-08 | 2020-09-18 | 西南交通大学 | 一种铁路受电弓和接触网的接触点在线检测方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101787011B1 (ko) * | 2016-01-20 | 2017-11-15 | 한국철도기술연구원 | 전기철도차량의 팬터그래프 진동 검측 방법 및 장치 |
| ITUA20162698A1 (it) * | 2016-04-19 | 2017-10-19 | Mer Mec S P A | Sistema ottico per la misura della forza di contatto tra il pantografo e la catenaria |
| RU183453U1 (ru) * | 2018-02-08 | 2018-09-24 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Омский государственный университет путей сообщения" | Устройство стабилизации контактного нажатия токоприемника |
| DK3741606T3 (da) * | 2019-05-24 | 2022-05-23 | Siemens Ag | Indretning og fremgangsmåde til registrering af slitage på et transportsystem med glidekontakter |
| CN113624228B (zh) * | 2021-07-26 | 2024-01-26 | 中国科学院上海微系统与信息技术研究所 | 一种图像传感器和加速度计的同步标定装置及方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194059A (ja) * | 1997-12-28 | 1999-07-21 | Railway Technical Res Inst | 接触力測定装置 |
| JP2003156397A (ja) * | 2001-11-19 | 2003-05-30 | Railway Technical Res Inst | パンタグラフの接触力測定方法及び接触力測定装置 |
| JP2003341389A (ja) * | 2002-05-27 | 2003-12-03 | Meidensha Corp | トロリー線の位置計測装置 |
| JP2006250774A (ja) * | 2005-03-11 | 2006-09-21 | Meidensha Corp | 画像処理によるパンタグラフ動作測定装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2134203C1 (ru) * | 1995-04-19 | 1999-08-10 | Товарищество с ограниченной ответственностью "МАДЖЕСТИК" | Способ контроля состояния контактного провода и устройство для его осуществления |
| RU2120866C1 (ru) * | 1997-04-03 | 1998-10-27 | Государственное предприятие "Научно-исследовательский институт электрофизической аппаратуры им.Д.В.Ефремова" | Устройство для замера и регистрации износа контактного провода |
| JP4085588B2 (ja) * | 2001-03-22 | 2008-05-14 | 株式会社明電舎 | パンタグラフ測定装置 |
| JP4635657B2 (ja) * | 2005-03-11 | 2011-02-23 | 株式会社明電舎 | 画像処理によるトロリ線摩耗測定装置 |
| JP4923942B2 (ja) * | 2006-10-20 | 2012-04-25 | 株式会社明電舎 | 画像処理によるパンタグラフ測定装置 |
| JP4954732B2 (ja) * | 2007-01-30 | 2012-06-20 | 公益財団法人鉄道総合技術研究所 | パンタグラフの接触力測定方法及び接触力測定装置 |
-
2008
- 2008-09-17 JP JP2008237357A patent/JP5151845B2/ja active Active
-
2009
- 2009-09-11 WO PCT/JP2009/065950 patent/WO2010032695A1/ja active Application Filing
- 2009-09-11 CN CN2009801364657A patent/CN102159954B/zh active Active
- 2009-09-11 RU RU2011115064/28A patent/RU2459213C1/ru active
- 2009-09-11 EP EP09814540.2A patent/EP2325656B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11194059A (ja) * | 1997-12-28 | 1999-07-21 | Railway Technical Res Inst | 接触力測定装置 |
| JP2003156397A (ja) * | 2001-11-19 | 2003-05-30 | Railway Technical Res Inst | パンタグラフの接触力測定方法及び接触力測定装置 |
| JP2003341389A (ja) * | 2002-05-27 | 2003-12-03 | Meidensha Corp | トロリー線の位置計測装置 |
| JP2006250774A (ja) * | 2005-03-11 | 2006-09-21 | Meidensha Corp | 画像処理によるパンタグラフ動作測定装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130282211A1 (en) * | 2012-04-22 | 2013-10-24 | Caterpillar, Inc. | Trolley Driven Machine Record and Playback Automation |
| US8818593B2 (en) * | 2012-04-22 | 2014-08-26 | Caterpillar Inc. | Trolley driven machine record and playback automation |
| CN111681265A (zh) * | 2020-06-08 | 2020-09-18 | 西南交通大学 | 一种铁路受电弓和接触网的接触点在线检测方法 |
| CN111681265B (zh) * | 2020-06-08 | 2023-02-28 | 西南交通大学 | 一种铁路受电弓和接触网的接触点在线检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010032695A1 (ja) | 2010-03-25 |
| JP5151845B2 (ja) | 2013-02-27 |
| CN102159954B (zh) | 2012-11-07 |
| EP2325656A4 (en) | 2014-02-26 |
| RU2459213C1 (ru) | 2012-08-20 |
| CN102159954A (zh) | 2011-08-17 |
| EP2325656A1 (en) | 2011-05-25 |
| EP2325656B1 (en) | 2017-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5151845B2 (ja) | 画像処理によるパンタグラフの鉛直加速度測定装置および測定方法 | |
| EP2565612B1 (en) | Contact force measurement method and contact force measurement device | |
| JP5494286B2 (ja) | 架線位置測定装置 | |
| WO2010084919A1 (ja) | 接触力測定装置及び接触力測定方法 | |
| JP6424362B2 (ja) | 線条計測装置及びその方法 | |
| JP5861318B2 (ja) | トロリ線データ比較装置 | |
| JP4979306B2 (ja) | 車両自動計測装置、車両自動計測システム及び車両自動計測方法 | |
| KR20120022943A (ko) | 팬터그래프 변위 측정 장치 및 트롤리선 경점 검출 방법 | |
| JP6277468B2 (ja) | 車両前方電柱位置検査装置 | |
| JP4954732B2 (ja) | パンタグラフの接触力測定方法及び接触力測定装置 | |
| JP5796684B2 (ja) | レーザ測定による支持物検知装置 | |
| JP6159177B2 (ja) | 架線位置計測装置及び方法 | |
| JPWO2020179188A1 (ja) | 構造物の変位量計測装置 | |
| JP2008292278A (ja) | 距離検出装置の光学ずれ検出方法及び距離検出装置 | |
| JP6638353B2 (ja) | 重錘位置検出装置及び方法 | |
| JP2015093532A (ja) | 電車の自己位置推定装置 | |
| JP2019011995A (ja) | 剛性検出装置、剛性検出方法、及びプログラム | |
| JP5162412B2 (ja) | トンネル壁面撮影装置 | |
| JP2015225055A (ja) | 画像処理によるトロリ線摩耗測定装置及びその方法 | |
| JP2009210489A (ja) | 振動計測システム及びコンピュータプログラム | |
| JP6141734B2 (ja) | ステレオ画像処理装置 | |
| JP4818747B2 (ja) | 長尺画像を用いた鉄道車両検査方法及びその装置 | |
| WO2018025329A1 (ja) | 集電装置監視システム | |
| JP2015220623A (ja) | 移動体撮像システム | |
| CN116668665A (zh) | 测量装置、移动装置、测量方法和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120529 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120904 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121119 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5151845 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |