JP2010064202A - ピッキング装置と方法 - Google Patents
ピッキング装置と方法 Download PDFInfo
- Publication number
- JP2010064202A JP2010064202A JP2008233765A JP2008233765A JP2010064202A JP 2010064202 A JP2010064202 A JP 2010064202A JP 2008233765 A JP2008233765 A JP 2008233765A JP 2008233765 A JP2008233765 A JP 2008233765A JP 2010064202 A JP2010064202 A JP 2010064202A
- Authority
- JP
- Japan
- Prior art keywords
- article
- image
- area
- height
- take
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Landscapes
- Manipulator (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
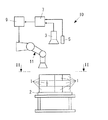
【解決手段】取出位置にある物品1を把持して取り出すピッキング装置10であって、取出位置にある物品1を上方から撮像することで、物品1を含む領域の画像データを取得する撮像装置3と、画像データ内に物品1が存在するべき物品存在画像領域を、入力された物品1の高さに基づいて、画像データから抽出する画像領域抽出装置7と、物品存在画像領域に対して画像処理を行うことで、物品1の認識データを取得する画像処理装置9と、認識データに基づいて、物品1を把持して取り出す取出装置11と、を備える。
【選択図】図1
Description
次に、この画像データに対し画像処理を行うことで、物品を認識する。例えば、画像処理装置が、物品上面の角部に関するパターン情報を予め記憶しておく。その上で、取得した前記画像データから物品上面の角部を抽出し、抽出した角部と前記パターン情報とをマッチングさせることで、物品の位置や向きを物品の認識データとして取得する。
その後、認識データに基づいて、多関節ロボットなどの取出装置により認識した物品を把持して取り出す。
また、取得した画像データの全体に対して画像処理を行っていたため、画像処理時間の短縮に限界があった。
取出位置にある物品を上方から撮像することで、該物品を含む領域の画像データを取得する撮像装置と、
前記画像データ内に前記物品が存在するべき物品存在画像領域を、入力された前記物品の高さに基づいて、前記画像データから抽出する画像領域抽出装置と、
前記物品存在画像領域に対して画像処理を行うことで、前記物品の認識データを取得する画像処理装置と、
前記認識データに基づいて、前記物品を把持して取り出す取出装置と、を備える、ことを特徴とするピッキング装置が提供される。
(1)物品存在画像領域以外において物品を誤認識することが無くなる。
(2)認識データを得るために行う画像処理の範囲が、物品存在画像領域に制限されるので、画像処理時間を短縮させることが可能になる。
前記物品存在画像領域は、前記パレットの存在領域から物品寸法の半分程度だけ外側に広げた領域である。
これらすべての物品のうち最も高い位置にある物品の前記高さに基づいて、前記画像領域抽出装置は物品存在画像領域を抽出する。
前記物品が上下複数段に積まれており、これら物品のうち最上段にある物品から順に、各段毎に物品取出処理を行い、
該物品取出処理は、
(A)取出位置にある物品を上方から撮像することで、該物品を含む領域の画像データを取得するステップと、
(B)前記画像データ内に前記物品が存在するべき物品存在画像領域を、高さ検出装置により取得された物品の高さに基づいて、前記画像データから抽出するステップと、
(C)前記物品存在画像領域に対して画像処理を行うことで、前記物品の認識データを取得し、
(D)前記認識データに基づいて、前記物品を把持して取り出すステップと、を有する、ことを特徴とするピッキング方法が提供される。
なお、取出位置において物品1が上下複数段に積まれている場合には、最上段の物品1の高さが、高さ検出装置5により検出されて画像領域抽出装置7へ入力される。さらに、図1の例のように、取出位置において、水平方向の複数箇所に前記物品1が上下複数段に積まれている場合には、これらすべての物品1のうち最も高い位置にある物品1の高さが、高さ検出装置5により検出されて画像領域抽出装置7へ入力される。
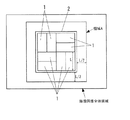
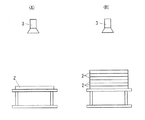
この例では、物品1は取出位置にあるパレット2に積載されているので、パレット2の矩形上面領域を前記物品存在画像領域としてもよい。代わりに、前記物品存在画像領域を、前記パレット2の存在領域(矩形上面領域)から物品寸法Lの半分L/2だけ外側に広げた矩形領域としてもよい。この広げた矩形領域は、図2の領域Aである。図2は、図1のII−II線矢視図であり、パレット2と物品1のみを示す。
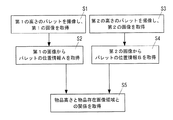
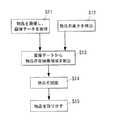
前記関係は、図3に示す手順で予め定められる。
なお、同じ撮像装置3を同じ位置に配置して、ステップS1とステップS3とが行われる。また、互いに直交する水平2方向に関する、パレット2の中心位置(例えば、重心位置)と向きを同じにして、ステップS1とステップS3とが行われる。また、ステップS1とステップS3で使用する撮像装置3は、後述のステップS11で使用する撮像装置3と同じであるのがよい。

この例では、パレット2の上面が矩形であるので、パレット2の上面領域を前記物品存在画像領域とする場合には、パレット2の上面の各頂点についての前記[数1]により、前記物品存在画像領域(パレット2の矩形上面領域)が定められる。
一方、前記物品存在画像領域を、前記パレット2の存在領域(矩形上面領域)から物品1の水平方向寸法Lの半分L/2だけ外側に広げた矩形領域(図2の領域A)である場合には、この矩形領域の各頂点についての前記[数1]により、前記物品存在画像領域(パレット2の上面領域)が定められる。なお、物品1の前記水平方向寸法は、撮像装置3により取得された画像データ内における当該物品1の寸法であり、物品1の上面が長方形である場合には、長辺の長さの半分であってよい。
上述のように求めた前記関係を用いた物品1のピッキング方法を図5に示す。
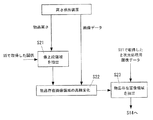
高さ検出装置5は、2つのCCDカメラを用いたステレオ撮像装置であってもよい。このステレオ撮像装置は、2つのCCDカメラで撮像した画像データからステレオマッチングにより、3次元画像データを取得する装置である。この場合には、ステップS13において、物品存在画像領域の高精度化を行ってもよい。この高精度化を図6のフローチャートに基づいて説明する。まず、ステップS21において、ステップS12で取得された物品1の高さと前記関係とに基づいて、物品存在画像領域に相当する最上段領域を定める。ステップS22において、ステップS21で定めた最上段領域と、高さ検出装置5により取得された3次元画像データのうち最も高い位置にある物品1と同じ高さの最上段画像データとを重ね合わせることで、ノイズなどの不必要なデータを除いて、当該最上段画像データから物品存在画像領域を抽出する。これにより、物品存在画像領域の高精度化がなされる。ステップS23において、このように高精度化された物品存在画像領域と、ステップS11で取得した2次元処理用の2次元画像データとを重ね合わせる(照合する)ことで、当該2次元画像データから物品存在画像領域が抽出される。
図6の処理を行う場合、上述の撮像装置3と、高さ検出装置5であるステレオ撮像装置とは同じであってよいが、ステレオ撮像装置の2つのCCDカメラのうち一方により、ステップS11で2次元の前記画像データを取得する。なお、物品存在画像領域の高精度化(図6の処理)は行わなくてもよい。
(1)物品存在画像領域以外において物品1を誤認識することが無くなる。
(2)認識データを得るために行う画像処理の範囲が、物品存在画像領域に制限されるので、画像処理時間を短縮させることが可能になる。
さらに、前記物品存在画像領域は、前記パレット2の存在領域から物品寸法の半分だけ外側に広げた領域とすることで、物品1が前記パレット2の存在領域からはみ出している場合、荷崩れが発生していることを前記画像処理で検知できる。荷崩れを検知した場合には、画像処理装置9はその旨の信号(警告音など)を出力して、オペレータに知らせることができる。
Claims (4)
- 取出位置にある物品を把持して取り出すピッキング装置であって、
取出位置にある物品を上方から撮像することで、該物品を含む領域の画像データを取得する撮像装置と、
前記画像データ内に前記物品が存在するべき物品存在画像領域を、入力された前記物品の高さに基づいて、前記画像データから抽出する画像領域抽出装置と、
前記物品存在画像領域に対して画像処理を行うことで、前記物品の認識データを取得する画像処理装置と、
前記認識データに基づいて、前記物品を把持して取り出す取出装置と、を備える、ことを特徴とするピッキング装置。 - 前記画像領域抽出装置は、前記物品の高さと前記物品存在画像領域との予め定められた関係に基づいて、前記物品存在画像領域を抽出する、ことを特徴とする請求項1に記載のピッキング装置。
- 前記物品はパレットに積載されており、
前記物品存在画像領域は、前記パレットの存在領域から物品寸法の半分程度だけ外側に広げた領域である、ことを特徴とする請求項1または2に記載のピッキング装置。 - 請求項1〜3のいずれか一項に記載のピッキング装置を用いて物品をピッキングするピッキング方法であって、
前記物品が上下複数段に積まれており、これら物品のうち最上段にある物品から順に、各段毎に物品取出処理を行い、
該物品取出処理は、
(A)取出位置にある物品を上方から撮像することで、該物品を含む領域の画像データを取得するステップと、
(B)前記画像データ内に前記物品が存在するべき物品存在画像領域を、高さ検出装置により取得された物品の高さに基づいて、前記画像データから抽出するステップと、
(C)前記物品存在画像領域に対して画像処理を行うことで、前記物品の認識データを取得し、
(D)前記認識データに基づいて、前記物品を把持して取り出すステップと、を有する、ことを特徴とするピッキング方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008233765A JP5360369B2 (ja) | 2008-09-11 | 2008-09-11 | ピッキング装置と方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008233765A JP5360369B2 (ja) | 2008-09-11 | 2008-09-11 | ピッキング装置と方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010064202A true JP2010064202A (ja) | 2010-03-25 |
| JP5360369B2 JP5360369B2 (ja) | 2013-12-04 |
Family
ID=42190236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008233765A Active JP5360369B2 (ja) | 2008-09-11 | 2008-09-11 | ピッキング装置と方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5360369B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012093104A (ja) * | 2010-10-25 | 2012-05-17 | Yaskawa Electric Corp | 形状計測装置、ロボットシステムおよび形状計測方法 |
| JP2015043175A (ja) * | 2013-08-26 | 2015-03-05 | 株式会社ダイフク | 物品認識装置及び物品認識設備 |
| JP2015114292A (ja) * | 2013-12-16 | 2015-06-22 | 川崎重工業株式会社 | ワークの位置情報特定装置および方法 |
| CN104876021A (zh) * | 2014-02-28 | 2015-09-02 | 发那科株式会社 | 物品排列装置、物品排列方法以及物品转运系统 |
| JP2016136437A (ja) * | 2013-12-16 | 2016-07-28 | 株式会社寺岡精工 | 商品販売データ処理装置 |
| JP2019189438A (ja) * | 2018-04-27 | 2019-10-31 | 株式会社ダイフク | ピッキング設備 |
| JP2020041862A (ja) * | 2018-09-07 | 2020-03-19 | 倉敷紡績株式会社 | 帯状物の3次元計測方法および帯状物の3次元計測装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11333770A (ja) * | 1998-03-20 | 1999-12-07 | Kobe Steel Ltd | 積荷位置姿勢認識装置 |
| WO2000057129A1 (en) * | 1999-03-19 | 2000-09-28 | Matsushita Electric Works, Ltd. | Three-dimensional object recognition method and pin picking system using the method |
| JP2000304509A (ja) * | 1999-04-21 | 2000-11-02 | Matsushita Electric Works Ltd | 物体特定方法及び装置 |
| JP2002013913A (ja) * | 2000-06-30 | 2002-01-18 | Daifuku Co Ltd | 物品位置認識装置 |
| JP2006224291A (ja) * | 2005-01-19 | 2006-08-31 | Yaskawa Electric Corp | ロボットシステム |
| JP2007140729A (ja) * | 2005-11-16 | 2007-06-07 | Ishikawajima Harima Heavy Ind Co Ltd | 物品の位置及び姿勢を検出する方法および装置 |
| JP2007245283A (ja) * | 2006-03-15 | 2007-09-27 | Nissan Motor Co Ltd | ワーク姿勢検知装置、ワーク姿勢検知方法、ピッキングシステム、およびピッキング方法 |
| JP2008062376A (ja) * | 2006-09-05 | 2008-03-21 | Adept Technology Inc | 無作為におかれた対象物のためのビンピッキングシステム |
-
2008
- 2008-09-11 JP JP2008233765A patent/JP5360369B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11333770A (ja) * | 1998-03-20 | 1999-12-07 | Kobe Steel Ltd | 積荷位置姿勢認識装置 |
| WO2000057129A1 (en) * | 1999-03-19 | 2000-09-28 | Matsushita Electric Works, Ltd. | Three-dimensional object recognition method and pin picking system using the method |
| JP2000304509A (ja) * | 1999-04-21 | 2000-11-02 | Matsushita Electric Works Ltd | 物体特定方法及び装置 |
| JP2002013913A (ja) * | 2000-06-30 | 2002-01-18 | Daifuku Co Ltd | 物品位置認識装置 |
| JP2006224291A (ja) * | 2005-01-19 | 2006-08-31 | Yaskawa Electric Corp | ロボットシステム |
| JP2007140729A (ja) * | 2005-11-16 | 2007-06-07 | Ishikawajima Harima Heavy Ind Co Ltd | 物品の位置及び姿勢を検出する方法および装置 |
| JP2007245283A (ja) * | 2006-03-15 | 2007-09-27 | Nissan Motor Co Ltd | ワーク姿勢検知装置、ワーク姿勢検知方法、ピッキングシステム、およびピッキング方法 |
| JP2008062376A (ja) * | 2006-09-05 | 2008-03-21 | Adept Technology Inc | 無作為におかれた対象物のためのビンピッキングシステム |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012093104A (ja) * | 2010-10-25 | 2012-05-17 | Yaskawa Electric Corp | 形状計測装置、ロボットシステムおよび形状計測方法 |
| JP2015043175A (ja) * | 2013-08-26 | 2015-03-05 | 株式会社ダイフク | 物品認識装置及び物品認識設備 |
| JP2016136437A (ja) * | 2013-12-16 | 2016-07-28 | 株式会社寺岡精工 | 商品販売データ処理装置 |
| JP2015114292A (ja) * | 2013-12-16 | 2015-06-22 | 川崎重工業株式会社 | ワークの位置情報特定装置および方法 |
| US9643796B2 (en) | 2014-02-28 | 2017-05-09 | Fanuc Corporation | Device and method of arraying articles by using robot, and article transfer system |
| JP2015214012A (ja) * | 2014-02-28 | 2015-12-03 | ファナック株式会社 | ロボットを用いて物品を整列させる物品整列装置及び物品整列方法、並びに物品整列装置を備えた物品移送システム |
| CN104876021A (zh) * | 2014-02-28 | 2015-09-02 | 发那科株式会社 | 物品排列装置、物品排列方法以及物品转运系统 |
| JP2019189438A (ja) * | 2018-04-27 | 2019-10-31 | 株式会社ダイフク | ピッキング設備 |
| WO2019208292A1 (ja) * | 2018-04-27 | 2019-10-31 | 株式会社ダイフク | ピッキング設備(picking facility) |
| CN111936404A (zh) * | 2018-04-27 | 2020-11-13 | 株式会社大福 | 拾取设备 |
| CN111936404B (zh) * | 2018-04-27 | 2022-08-09 | 株式会社大福 | 拾取设备 |
| TWI803624B (zh) * | 2018-04-27 | 2023-06-01 | 日商大福股份有限公司 | 揀貨設備 |
| JP2020041862A (ja) * | 2018-09-07 | 2020-03-19 | 倉敷紡績株式会社 | 帯状物の3次元計測方法および帯状物の3次元計測装置 |
| JP7177639B2 (ja) | 2018-09-07 | 2022-11-24 | 倉敷紡績株式会社 | 帯状物の3次元計測方法および帯状物の3次元計測装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5360369B2 (ja) | 2013-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102650494B1 (ko) | 자동화된 패키지 등록 시스템, 디바이스 및 방법 | |
| US20230415360A1 (en) | Automated package registration systems, devices, and methods | |
| JP5429614B2 (ja) | 箱状ワーク認識装置および方法 | |
| JP5360369B2 (ja) | ピッキング装置と方法 | |
| JP3768174B2 (ja) | ワーク取出し装置 | |
| US9227323B1 (en) | Methods and systems for recognizing machine-readable information on three-dimensional objects | |
| JP7398763B2 (ja) | 重なり処理機構を備えたロボットシステム及びその操作方法 | |
| JP2010120141A (ja) | バラ積みピッキング装置とその制御方法 | |
| JP6052103B2 (ja) | 物品認識装置及び物品認識設備 | |
| JP4866890B2 (ja) | ワーク形状推定装置 | |
| JP5544464B2 (ja) | 対象物の3次元位置・姿勢認識装置及びその方法 | |
| JP5263501B2 (ja) | デパレタイズ用のワーク位置認識装置および方法 | |
| JP2015114292A (ja) | ワークの位置情報特定装置および方法 | |
| JP5476943B2 (ja) | 姿勢認識方法およびこの方法を用いた3次元視覚センサ | |
| JP2020049558A (ja) | 物品取り出しシステム | |
| CN105513040B (zh) | 不定形体位置推定方法、不定形体位置推定装置以及程序 | |
| JP2021036204A (ja) | 移載対象ワーク高さ計測システム | |
| JP2009250777A (ja) | 表面検査装置および表面検査方法 | |
| JP2021068099A (ja) | 移載対象ワーク向き認識システム | |
| US12134191B2 (en) | Robot system | |
| WO2022264726A1 (ja) | 搬送システム、物品の搬送を制御するためにコンピュータで実行される方法、および、当該方法をコンピュータに実行させるプログラム | |
| WO2022264381A1 (ja) | ワーク取出し個数算出装置、ハンドシステム、及び表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121213 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130416 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130807 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130820 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5360369 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |