JP2010063309A - 検出器用巻線の巻線方法 - Google Patents
検出器用巻線の巻線方法 Download PDFInfo
- Publication number
- JP2010063309A JP2010063309A JP2008228438A JP2008228438A JP2010063309A JP 2010063309 A JP2010063309 A JP 2010063309A JP 2008228438 A JP2008228438 A JP 2008228438A JP 2008228438 A JP2008228438 A JP 2008228438A JP 2010063309 A JP2010063309 A JP 2010063309A
- Authority
- JP
- Japan
- Prior art keywords
- winding
- phase
- group
- fixed magnetic
- magnetic pole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004804 winding Methods 0.000 title claims abstract description 379
- 238000000034 method Methods 0.000 title claims abstract description 68
- 230000004907 flux Effects 0.000 claims abstract description 27
- 238000001514 detection method Methods 0.000 description 15
- 230000007423 decrease Effects 0.000 description 10
- 238000011161 development Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images









Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【解決手段】本発明に係る検出器用巻線の巻線方法は、固定磁極に巻回した巻線群を直列接続して得られる磁束分布が2P極の正弦波分布となるように1相分巻線群を構成し、さらに、複数の1相分巻線群を用いることによりn相分巻線群を構成して、2P極かつn相の正弦波磁束を得るように構成する検出器用巻線の巻線方法において、1相分巻線群における固定磁極間の渡り線を、全体の半分の数の渡り線(例えば、グループ1の渡り線)と残りの半分の数の渡り線(例えば、グループ4の渡り線)が固定子コアの円周方向に沿って互いに反対向き、かつ長さの合計が同じになるように形成する。
【選択図】図4
Description
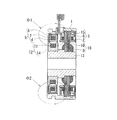
まず、比較のため、従来の一般的な検出器用巻線の巻線方法を説明する。図1(a)は、従来の検出器用巻線の巻線方法の一例を示すブラシレスレゾルバのレゾルバ固定子3aの側面図、図1(b)は、図1(a)に示すレゾルバ固定子3aのZ−Z’で切断した部分断面図である。

図3(a)は、本発明の第1の実施形態による検出器用巻線の巻線方法を示すための、ブラシレスレゾルバのレゾルバ固定子3bの側面図、図3(b)は、図3(a)に示すレゾルバ固定子3bのZ−Z’で切断した部分断面図である。図3において、図1に示した従来のレゾルバ固定子3aと共通する構成要素には同一符号を付している。
次に、本発明に係る検出器用巻線の巻線方法の第2の実施形態について説明する。図5(a)は、本発明の第2の実施形態による検出器用巻線の巻線方法を示すための、ブラシレスレゾルバのレゾルバ固定子3cの側面図、図5(b)は、図5(a)に示すレゾルバ固定子3cのZ−Z’で切断した部分断面図である。図5において、図3に示したレゾルバ固定子3bと共通する構成要素には同一符号を付している。
次に、本発明の巻線方法の第3の実施形態について説明する。
図8(a)は、本発明の第3の実施形態による検出器用巻線の巻線方法を示すための、ブラシレスレゾルバのレゾルバ固定子3dの側面図、図8(b)は、図8(a)に示すレゾルバ固定子3dのZ−Z’で切断した部分断面図である。図8において、図3に示したレゾルバ固定子3bと共通する構成要素には同一符号を付している。
例えば、上記の実施形態においては、n相分巻線群を、1相分巻線群を2相分(SIN相及びCOS相を各1相)巻回して構成した2相分巻線群としたが、本発明は、この相構成に限定されるものではない。そして、本発明に係る検出器用巻線の巻線方法が適用される回転検出器は、ブラシレスレゾルバに限定されるものではなく、ブラシレスタイプであれば、ブラシレスシンクロ等の回転検出器にも適用可能である。
Claims (6)
- それぞれに磁極歯を有する任意の数(S)の固定磁極を輪状の固定子コアの内径側に突出させ、前記固定磁極に巻回した前記任意の数(S)と一致する合計S個の巻線群を直列接続して得られる磁束分布が2P極の正弦波分布となるように1相分巻線群を構成し、さらに、複数の前記1相分巻線群を用いることによりn相分巻線群を構成して、2P極かつn相の正弦波磁束を得るように構成する検出器用巻線の巻線方法において、前記1相分巻線群における前記固定磁極間の渡り線を、全体の半分の数の渡り線と残りの半分の数の渡り線が前記固定子コアの円周方向に沿って互いに反対向き、かつ長さの合計が同じになるように形成することを特徴とする検出器用巻線の巻線方法。
- 前記全体の半分の数の渡り線を先に形成し、その後に、前記残りの数の渡り線を形成することを特徴とする請求項1に記載の検出器用巻線の巻線方法。
- 前記n相分巻線群をSIN相とCOS相の2相分巻線群としてレゾルバを構成し、前記SIN相と前記COS相は、前記固定磁極の内側と外側に交互に位置するように設けられた巻線からなるとともに、前記SIN相と前記COS相のそれぞれの1相分巻線群について、該1相分巻線群を二分する半分の数(S/2)の巻線群のそれぞれは、前記固定磁極に対して一極おきに連続して巻回されることを特徴とする請求項1又は2に記載の検出器用巻線の巻線方法。
- 前記半分の数(S/2)の巻線群は、前記固定磁極における巻回数が同じで巻回方向が互いに逆向きである巻線同士からなる巻線対の複数の集まりによって構成されることを特徴とする請求項3に記載の検出器用巻線の巻線方法。
- 前記SIN相の1相分巻線群と前記COS相の1相分巻線群は、前記固定磁極における巻回数、巻線方向、及び巻回位置のすべてが互いに同一の巻線の組合せにより構成されることを特徴とする請求項3に記載の検出器用巻線の巻線方法。
- 前記n相分巻線群をSIN相とCOS相の2相分巻線群としてレゾルバを構成し、前記SIN相と前記COS相は、前記固定磁極の内側と外側に交互に位置するように設けられた巻線からなるとともに、前記SIN相と前記COS相のそれぞれの1相分巻線群について、該1相分巻線群を二分する半分の数(S/2)の巻線群のそれぞれは、前記固定磁極に対して隣極に連続して巻回されることを特徴とする請求項1又は2に記載の検出器用巻線の巻線方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008228438A JP5344125B2 (ja) | 2008-09-05 | 2008-09-05 | 検出器用巻線の巻線方法及びブラシレスタイプ回転検出器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008228438A JP5344125B2 (ja) | 2008-09-05 | 2008-09-05 | 検出器用巻線の巻線方法及びブラシレスタイプ回転検出器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010063309A true JP2010063309A (ja) | 2010-03-18 |
| JP5344125B2 JP5344125B2 (ja) | 2013-11-20 |
Family
ID=42189493
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008228438A Expired - Fee Related JP5344125B2 (ja) | 2008-09-05 | 2008-09-05 | 検出器用巻線の巻線方法及びブラシレスタイプ回転検出器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5344125B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2566019A4 (en) * | 2011-01-27 | 2015-12-30 | Panasonic Corp | WINDING METHOD FOR A STATOR OF A ROTATION DETECTOR, WINDING STRUCTURE THEREFOR AND ELECTRIC MOTOR WITH A ROTATION DETECTOR |
| RU215099U1 (ru) * | 2022-05-04 | 2022-11-29 | Акционерное Общество "Завод "Фиолент" | Высокоточный вращающийся трансформатор |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60176454A (ja) * | 1984-02-20 | 1985-09-10 | Fanuc Ltd | レゾルバ |
| JPS60141673U (ja) * | 1984-02-29 | 1985-09-19 | 株式会社安川電機 | 誘導子形レゾルバ |
| JP2001352734A (ja) * | 2000-06-09 | 2001-12-21 | Tamagawa Seiki Co Ltd | 角度検出装置 |
| JP2003209942A (ja) * | 2002-01-11 | 2003-07-25 | Tamagawa Seiki Co Ltd | 回転検出器用ステータにおける巻線方法及び構造 |
| JP2004251733A (ja) * | 2003-02-19 | 2004-09-09 | Minebea Co Ltd | 鉄心巻線、その製造方法、および鉄心巻線を用いたバリアブルリラクタンス型角度検出器 |
| JP2007322132A (ja) * | 2006-05-30 | 2007-12-13 | Jtekt Corp | 回転角検出装置およびトルクセンサ |
-
2008
- 2008-09-05 JP JP2008228438A patent/JP5344125B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60176454A (ja) * | 1984-02-20 | 1985-09-10 | Fanuc Ltd | レゾルバ |
| JPS60141673U (ja) * | 1984-02-29 | 1985-09-19 | 株式会社安川電機 | 誘導子形レゾルバ |
| JP2001352734A (ja) * | 2000-06-09 | 2001-12-21 | Tamagawa Seiki Co Ltd | 角度検出装置 |
| JP2003209942A (ja) * | 2002-01-11 | 2003-07-25 | Tamagawa Seiki Co Ltd | 回転検出器用ステータにおける巻線方法及び構造 |
| JP2004251733A (ja) * | 2003-02-19 | 2004-09-09 | Minebea Co Ltd | 鉄心巻線、その製造方法、および鉄心巻線を用いたバリアブルリラクタンス型角度検出器 |
| JP2007322132A (ja) * | 2006-05-30 | 2007-12-13 | Jtekt Corp | 回転角検出装置およびトルクセンサ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2566019A4 (en) * | 2011-01-27 | 2015-12-30 | Panasonic Corp | WINDING METHOD FOR A STATOR OF A ROTATION DETECTOR, WINDING STRUCTURE THEREFOR AND ELECTRIC MOTOR WITH A ROTATION DETECTOR |
| RU215099U1 (ru) * | 2022-05-04 | 2022-11-29 | Акционерное Общество "Завод "Фиолент" | Высокоточный вращающийся трансформатор |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5344125B2 (ja) | 2013-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6608711B2 (ja) | 回転電機およびステータ | |
| JP6261809B2 (ja) | 固定子および回転電機 | |
| CN107408855B (zh) | 旋转电机 | |
| TWI383412B (zh) | 旋轉角偵測或同步裝置用繞阻之捲繞方法 | |
| JP6605517B2 (ja) | 回転電機 | |
| JP5376016B1 (ja) | 回転電機 | |
| JP2015154582A (ja) | 三相回転電機のステータ | |
| JP5802429B2 (ja) | ステータおよびレゾルバ | |
| JP2006145300A (ja) | バリアブルリラクタンス型角度検出器 | |
| WO2022071029A1 (ja) | ステータおよびモータ | |
| JP2019193471A (ja) | 回転電機のステータ | |
| JP2016192886A (ja) | 磁石レス回転電機 | |
| CN108027253B (zh) | 无刷旋转变压器及旋转角度检测装置 | |
| JP2006125995A (ja) | 回転角度検出装置 | |
| JP2020080607A (ja) | 回転電機 | |
| JP5344125B2 (ja) | 検出器用巻線の巻線方法及びブラシレスタイプ回転検出器 | |
| JP2011172440A (ja) | 回転電機のステータ | |
| JP2015186369A (ja) | 可変リラクタンス型レゾルバ、モータ及びロボット | |
| JP5651060B2 (ja) | バリアブルリラクタンス型レゾルバ | |
| JP2003232654A (ja) | ブラシレスレゾルバ | |
| JP5491344B2 (ja) | モータ | |
| JP2006292612A (ja) | バリアブルリラクタンス型角度検出器 | |
| JP5995885B2 (ja) | 回転角度検出装置 | |
| JPWO2018079187A1 (ja) | ステータ | |
| JP6926893B2 (ja) | 回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130306 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130703 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130730 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5344125 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |