JP2010058741A - 船舶推進機の旋回制御装置 - Google Patents
船舶推進機の旋回制御装置 Download PDFInfo
- Publication number
- JP2010058741A JP2010058741A JP2008228635A JP2008228635A JP2010058741A JP 2010058741 A JP2010058741 A JP 2010058741A JP 2008228635 A JP2008228635 A JP 2008228635A JP 2008228635 A JP2008228635 A JP 2008228635A JP 2010058741 A JP2010058741 A JP 2010058741A
- Authority
- JP
- Japan
- Prior art keywords
- servo
- signal
- turning
- control
- propulsion device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Control Of Multiple Motors (AREA)
Abstract
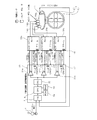
【解決手段】旋回制御基板26は操作ハンドル4からのハンドル信号とセンサ5からのフィードバック信号の偏差に基づいてモータ速度指令を演算し、これを複数のACサーボアンプ32a〜32cに対して同時に同一のデジタル信号としてデジタル通信により送信する。各ACサーボモータ15a〜15cは各々独立して制御可能であるため、一部のACサーボアンプに故障が生じても装置全体としての制御不能には陥らない。複数のACサーボモータによる制御のため、小型から大型の旋回式船舶推進機に広く適用可能であり、アナログ式のようなオフセットの影響もなく高い追従精度が得られる。
【選択図】図1
Description
以下にこれらの装置について説明する。
図4に示すように、船舶推進機1は、船舶の底部外面に突出して旋回自在に設けられたケーシング2と、そのケーシング2に設けられ、図示しない主機に連結されて回転駆動されるプロペラ3とを備えている。そして、本例の旋回制御装置は、船舶推進機1の推進方向を任意に設定するために、船舶推進機1を所望の角度だけ旋回させて所望の旋回位置に設定するために利用される。この旋回制御装置を各構成部分ごとに説明する。
図5に示すように、船舶推進機1は、船舶の底部外面に突出して旋回自在に設けられたケーシング2と、そのケーシング2に設けられ、図示しない主機に連結されて回転駆動されるプロペラ3とを備えている。そして、本例の旋回制御装置は、船舶推進機1の推進方向を任意に設定するために、船舶推進機1を所望の角度だけ旋回させて所望の旋回位置に設定するために利用される。この旋回制御装置を各構成部分ごとに説明する。
回転駆動されるプロペラを備え推進方向を任意に設定するために船舶に旋回自在に設けられた船舶推進機を所望の旋回位置に設定する旋回制御装置において、
船舶推進機の旋回位置を設定することにより前記旋回位置を示すハンドル信号を出力する操作ハンドルと、
船舶推進機の旋回位置を検出してフィードバック信号を出力するセンサと、
前記操作ハンドルが出力するハンドル信号と前記センサからのフィードバック信号の偏差を演算し、該偏差に応じてモータ速度指令を演算し、前記モータ速度指令を複数の対象に対して同時に同一のデジタル信号としてデジタル通信によって送信する制御手段と、
前記制御手段から同時に同一のデジタル信号としてデジタル通信によって送信された前記モータ速度指令をそれぞれ受信し、前記モータ速度指令に応じて制御信号をそれぞれ出力する複数のACサーボアンプと、
前記各ACサーボアンプからの前記制御信号をそれぞれ受けて駆動されることにより船舶推進機1を旋回させる複数のACサーボモータと、
を具備することを特徴としている。
前記各ACサーボアンプには、当該ACサーボアンプの異常を前記制御手段にアラーム信号で通報するアラーム手段が設けられており、
前記制御手段はアラーム信号を受信した場合には、当該アラーム信号を出力した前記アラーム手段が設けられた前記ACサーボアンプを前記制御手段から切り離すことを特徴としている。
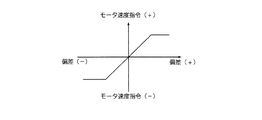
図3に示す本例の電気式旋回制御においては、まず旋回制御基板26のCPU8内部でハンドル信号とフィードバック信号の偏差が算出される(S1)。さらに偏差とモータ速度信号との関係を表すデータと、算出した前記偏差から、モータ指令信号が演算される(S2)。これをデジタル信号に変換してRS422の各ドライバ21a,21b,21cから対応する各ACサーボアンプ32a,32b,32cにデジタルのモータ速度指令を送信する(S3)。
3…プロペラ
4…操作ハンドル
5…角度センサ
15a〜c…ACサーボモータ
17…サーボON/OFFスイッチ
18…アラーム手段としてのアラームスイッチ
21a〜c…ドライバ
26…制御手段としての旋回制御基板
32a〜c…ACサーボアンプ
Claims (2)
- 回転駆動されるプロペラを備え推進方向を任意に設定するために船舶に旋回自在に設けられた船舶推進機を所望の旋回位置に設定する旋回制御装置において、
船舶推進機の旋回位置を設定することにより前記旋回位置を示すハンドル信号を出力する操作ハンドルと、
船舶推進機の旋回位置を検出してフィードバック信号を出力するセンサと、
前記操作ハンドルが出力するハンドル信号と前記センサからのフィードバック信号の偏差を演算し、該偏差に応じてモータ速度指令を演算し、前記モータ速度指令を複数の対象に対して同時に同一のデジタル信号としてデジタル通信によって送信する制御手段と、
前記制御手段から同時に同一のデジタル信号としてデジタル通信によって送信された前記モータ速度指令をそれぞれ受信し、前記モータ速度指令に応じて制御信号をそれぞれ出力する複数のACサーボアンプと、
前記各ACサーボアンプからの前記制御信号をそれぞれ受けて駆動されることにより船舶推進機を旋回させる複数のACサーボモータと、
を具備することを特徴とする船舶推進機の旋回制御装置。 - 前記各ACサーボアンプには、当該ACサーボアンプの異常を前記制御手段にアラーム信号で通報するアラーム手段が設けられており、
前記制御手段はアラーム信号を受信した場合には、当該アラーム信号を出力した前記アラーム手段が設けられた前記ACサーボアンプを前記制御手段から切り離すことを特徴とする請求項1記載の船舶推進機の旋回制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008228635A JP5364318B2 (ja) | 2008-09-05 | 2008-09-05 | 船舶推進機の旋回制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008228635A JP5364318B2 (ja) | 2008-09-05 | 2008-09-05 | 船舶推進機の旋回制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013108041A Division JP5636470B2 (ja) | 2013-05-22 | 2013-05-22 | 船舶推進機の旋回制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010058741A true JP2010058741A (ja) | 2010-03-18 |
| JP5364318B2 JP5364318B2 (ja) | 2013-12-11 |
Family
ID=42186045
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008228635A Active JP5364318B2 (ja) | 2008-09-05 | 2008-09-05 | 船舶推進機の旋回制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5364318B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014054304A1 (ja) | 2012-10-05 | 2014-04-10 | 新潟原動機株式会社 | 船舶推進機の旋回制御装置 |
| JP2017171293A (ja) * | 2017-06-05 | 2017-09-28 | 新潟原動機株式会社 | 船舶推進機の旋回制御装置 |
| JP2022066156A (ja) * | 2020-10-16 | 2022-04-28 | 川崎重工業株式会社 | 船舶制御システム及び船舶 |
| CN116062115A (zh) * | 2022-09-06 | 2023-05-05 | 中国人民解放军91404部队 | 一种针对z形操纵试验数据自动处理方法 |
| CN118331265A (zh) * | 2024-04-12 | 2024-07-12 | 哈尔滨工业大学 | 具有预定跟踪精度与时间的船舶轨迹跟踪控制系统及方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068190U (ja) * | 1992-07-08 | 1994-02-01 | 川崎重工業株式会社 | 旋回式スラスタ用旋回駆動装置 |
| JPH07215292A (ja) * | 1994-02-04 | 1995-08-15 | Mitsubishi Heavy Ind Ltd | 振動翼制御推進機付ビークル |
| JP2008018882A (ja) * | 2006-07-14 | 2008-01-31 | Honda Motor Co Ltd | 船外機の変換ユニット |
-
2008
- 2008-09-05 JP JP2008228635A patent/JP5364318B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068190U (ja) * | 1992-07-08 | 1994-02-01 | 川崎重工業株式会社 | 旋回式スラスタ用旋回駆動装置 |
| JPH07215292A (ja) * | 1994-02-04 | 1995-08-15 | Mitsubishi Heavy Ind Ltd | 振動翼制御推進機付ビークル |
| JP2008018882A (ja) * | 2006-07-14 | 2008-01-31 | Honda Motor Co Ltd | 船外機の変換ユニット |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014054304A1 (ja) | 2012-10-05 | 2014-04-10 | 新潟原動機株式会社 | 船舶推進機の旋回制御装置 |
| JP2014073783A (ja) * | 2012-10-05 | 2014-04-24 | Niigata Power Systems Co Ltd | 船舶推進機の旋回制御装置 |
| EP2905219A4 (en) * | 2012-10-05 | 2016-07-13 | Niigata Power Systems Co Ltd | ROTATING CONTROL DEVICE FOR A SHIP DRIVE DEVICE |
| JP2017171293A (ja) * | 2017-06-05 | 2017-09-28 | 新潟原動機株式会社 | 船舶推進機の旋回制御装置 |
| JP2022066156A (ja) * | 2020-10-16 | 2022-04-28 | 川崎重工業株式会社 | 船舶制御システム及び船舶 |
| JP7752016B2 (ja) | 2020-10-16 | 2025-10-09 | 川崎重工業株式会社 | 船舶制御システム及び船舶 |
| CN116062115A (zh) * | 2022-09-06 | 2023-05-05 | 中国人民解放军91404部队 | 一种针对z形操纵试验数据自动处理方法 |
| CN118331265A (zh) * | 2024-04-12 | 2024-07-12 | 哈尔滨工业大学 | 具有预定跟踪精度与时间的船舶轨迹跟踪控制系统及方法 |
| CN118331265B (zh) * | 2024-04-12 | 2024-12-13 | 哈尔滨工业大学 | 具有预定跟踪精度与时间的船舶轨迹跟踪控制系统及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5364318B2 (ja) | 2013-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6312108B2 (ja) | 船舶ステーション維持システム及び方法 | |
| US9868501B1 (en) | Method and system for controlling propulsion of a marine vessel | |
| US8777681B1 (en) | Systems and methods for maneuvering a marine vessel | |
| JP5364318B2 (ja) | 船舶推進機の旋回制御装置 | |
| CN100580596C (zh) | 动态定位系统的测试方法和系统 | |
| JP4316143B2 (ja) | 推進ユニット回転用装置とその方法 | |
| EP3099570B1 (en) | Hydraulic slip compensation systems and methods | |
| KR102167906B1 (ko) | 조향 제어 장치 및 이를 포함하는 조향 보조 시스템 | |
| EP1812287B1 (en) | System of automatic control of maneuver of motor crafts, related method, and craft provided with the system | |
| US9963214B2 (en) | Ship handling device | |
| US12545388B2 (en) | Steering system with twin actuators and tie bar | |
| US11820478B2 (en) | Electrical steering system in a marine vessel and a method for controlling such a steering system | |
| CN108482631B (zh) | 一种多台全回转舵桨的控制系统及控制方法 | |
| US9376198B2 (en) | Serviceable marine pod steering brake system | |
| EP1598267B1 (en) | Directional control system and method for marine vessels | |
| WO2018061254A1 (ja) | アクチュエータシステム、異常検知装置 | |
| JP5636470B2 (ja) | 船舶推進機の旋回制御装置 | |
| EP3187952A1 (en) | Autopilot autorelease systems and methods | |
| JP6395996B2 (ja) | 船舶推進機の旋回制御装置 | |
| JP2007253638A (ja) | リモコン装置及び船舶 | |
| KR20120014347A (ko) | Cpp 추진 제어 시스템에서의 프로펠러 피치 제어 장치 및 방법 | |
| CN113524995B (zh) | 水陆两栖车辆水路转向切换的冗余控制方法及设备 | |
| CN109808863B (zh) | 小型双推无人艇操舵系统 | |
| JP5058721B2 (ja) | 船舶推進機の旋回制御装置 | |
| JP6419897B2 (ja) | 船舶推進機の旋回制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110516 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130522 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5364318 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |