JP2010055517A - 構造解析装置及び構造解析方法 - Google Patents
構造解析装置及び構造解析方法 Download PDFInfo
- Publication number
- JP2010055517A JP2010055517A JP2008222027A JP2008222027A JP2010055517A JP 2010055517 A JP2010055517 A JP 2010055517A JP 2008222027 A JP2008222027 A JP 2008222027A JP 2008222027 A JP2008222027 A JP 2008222027A JP 2010055517 A JP2010055517 A JP 2010055517A
- Authority
- JP
- Japan
- Prior art keywords
- observation
- displacement
- target mark
- specific node
- node
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012916 structural analysis Methods 0.000 title claims abstract description 54
- 238000000034 method Methods 0.000 title claims abstract description 20
- 238000006073 displacement reaction Methods 0.000 claims abstract description 201
- 238000012545 processing Methods 0.000 claims description 21
- 238000005259 measurement Methods 0.000 claims description 19
- 230000008859 change Effects 0.000 claims description 14
- 230000003993 interaction Effects 0.000 claims description 7
- 238000003696 structure analysis method Methods 0.000 claims description 6
- 230000002708 enhancing effect Effects 0.000 abstract description 2
- 230000008569 process Effects 0.000 abstract description 2
- 238000010586 diagram Methods 0.000 description 18
- 238000004458 analytical method Methods 0.000 description 15
- 239000013598 vector Substances 0.000 description 14
- 238000002347 injection Methods 0.000 description 11
- 239000007924 injection Substances 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 6
- 238000010438 heat treatment Methods 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000005303 weighing Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000001746 injection moulding Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012552 review Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images












Abstract
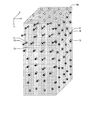
【解決手段】 観測対象物に固定された観測対象マークの位置を観測する観測装置と、観測装置の観測結果が入力される処理装置とを有する。処理装置は、観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、観測対象マークの位置に一致する節点、または観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、観測装置から取得した観測結果に基づいて、観測対象マークの変位を計測する工程と、観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する特定節点の変位を決定する工程と、決定された特定節点の変位を拘束条件として、観測対象物の構造解析を行う工程とを実行する。
【選択図】 図1
Description
観測対象物に固定された観測対象マークの位置を観測する観測装置と、
前記観測装置の観測結果が入力される処理装置と
を有し、
前記処理装置は、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記観測装置から取得した観測結果に基づいて、観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点の変位を決定する工程と、
決定された前記特定節点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を実行する構造解析装置が提供される。
観測対象物に固定された観測対象マークの位置を観測する観測装置と、
前記観測装置の観測結果が入力される処理装置と
を有し、
前記処理装置は、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記特定節点の各々に対応して強制変位点を定義する工程と、
前記強制変位点と前記特定節点との間に、該強制変位点の変位と該特定節点の変位とに依存した相互作用を定義する工程と、
前記観測装置から取得した観測結果に基づいて、前記観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点に対応付けられた前記強制変位点の変位を決定する工程と、
決定された前記強制変位点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を実行する構造解析装置が提供される。
観測対象物に、観測対象マークを固定する工程と、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記特定節点の各々に対応して強制変位点を定義する工程と、
前記強制変位点と前記特定節点との間に、該強制変位点の変位と該特定節点の変位とに依存した相互作用を定義する工程と、
前記観測装置から取得した観測結果に基づいて、前記観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点に対応付けられた前記強制変位点の変位を決定する工程と、
決定された前記強制変位点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を有する構造解析方法が提供される。
11 観測対象マーク
13 節点
13S 特定節点
15、16 変位
17、18 強制変位点
19、20 仮想的なばね
25、26 変位ベクトル
31 第1の観測装置
32 第2の観測装置
40 処理装置
41 画像表示装置
42 対象物表示領域
43 操作部
44 経過時間表示バー
45 表示指令部
50 変位ベクトル
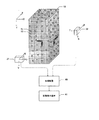
60A〜60F 特定節点
61A〜61F 変位ベクトル
65A〜65F 強制変位点
66A〜66F 仮想的なばね
70 特定節点
71、72 強制変位点
73、74 仮想的なばね
80 有限要素
81 角度センサ
Claims (8)
- 観測対象物に固定された観測対象マークの位置を観測する観測装置と、
前記観測装置の観測結果が入力される処理装置と
を有し、
前記処理装置は、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記観測装置から取得した観測結果に基づいて、観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点の変位を決定する工程と、
決定された前記特定節点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を実行する構造解析装置。 - 観測対象物に、観測対象マークを固定する工程と、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点の変位を決定する工程と、
決定された前記特定節点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を有する構造解析方法。 - 観測対象物に固定された観測対象マークの位置を観測する観測装置と、
前記観測装置の観測結果が入力される処理装置と
を有し、
前記処理装置は、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記特定節点の各々に対応して強制変位点を定義する工程と、
前記強制変位点と前記特定節点との間に、該強制変位点の変位と該特定節点の変位とに依存した相互作用を定義する工程と、
前記観測装置から取得した観測結果に基づいて、前記観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点に対応付けられた前記強制変位点の変位を決定する工程と、
決定された前記強制変位点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を実行する構造解析装置。 - 前記強制変位点が前記特定節点に及ぼす相互作用は、該強制変位点と該特定節点との間隔を初期状態に戻す復元力である請求項3に記載の構造解析装置。
- 観測対象物に、観測対象マークを固定する工程と、
前記観測対象物を、仮想的に複数の要素に分割し、該要素上に複数の節点を設定する工程と、
前記観測対象マークの位置に一致する節点、または前記観測対象マークの位置を含む要素上の一つの節点を、特定節点として選択する工程と、
前記特定節点の各々に対応して強制変位点を定義する工程と、
前記強制変位点と前記特定節点との間に、該強制変位点の変位と該特定節点の変位とに依存した相互作用を定義する工程と、
前記観測装置から取得した観測結果に基づいて、前記観測対象マークの変位を計測する工程と、
前記観測対象マークの計測された変位に基づいて、当該観測対象マークに対応する前記特定節点に対応付けられた前記強制変位点の変位を決定する工程と、
決定された前記強制変位点の変位を拘束条件として、前記観測対象物の構造解析を行う工程と
を有する構造解析方法。 - 前記強制変位点が前記特定節点に及ぼす相互作用は、該強制変位点と該特定節点との間隔を初期状態に戻す復元力である請求項5に記載の構造解析方法。
- 観測対象物の表面に離散的に固定され、基準面からの傾斜角を測定する角度測定器と、
前記角度測定器の測定結果が入力される処理装置と
を有し、
前記処理装置は、
前記観測対象物を、仮想的に複数の要素に分割する工程と、
前記角度測定器で、当該角度測定器が取り付けられた位置の前記観測対象物の表面の、基準面からの傾斜角を測定する工程と、
前記複数の要素のうち、前記角度測定器が取り付けられた位置に対応する要素に、測定された傾斜角に基づいて、強制的に姿勢変化を設定する工程と、
決定された前記強制的な姿勢変化を拘束条件として、前記観測対象物の構造解析を行う工程と
を実行する構造解析装置。 - 観測対象物の表面に、基準面からの傾斜角を測定する複数の角度測定器を離散的に固定する工程と、
前記観測対象物を、仮想的に複数の要素に分割する工程と、
前記観測対象物に形状の変化を生じさせて、前記角度測定器で、当該角度測定器が取り付けられた位置の前記観測対象物の表面の、基準面からの傾斜角を測定する工程と、
前記複数の要素のうち、前記角度測定器が取り付けられた位置に対応する要素に、測定された傾斜角に基づいて、強制的に姿勢変化を設定する工程と、
決定された前記強制的な姿勢変化を拘束条件として、前記観測対象物の構造解析を行う工程と
を有する構造解析方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008222027A JP5203100B2 (ja) | 2008-08-29 | 2008-08-29 | 構造解析装置及び構造解析方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008222027A JP5203100B2 (ja) | 2008-08-29 | 2008-08-29 | 構造解析装置及び構造解析方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010055517A true JP2010055517A (ja) | 2010-03-11 |
| JP5203100B2 JP5203100B2 (ja) | 2013-06-05 |
Family
ID=42071334
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008222027A Expired - Fee Related JP5203100B2 (ja) | 2008-08-29 | 2008-08-29 | 構造解析装置及び構造解析方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5203100B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016004484A (ja) * | 2014-06-18 | 2016-01-12 | 住友ゴム工業株式会社 | タイヤのシミュレーション方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005173706A (ja) * | 2003-12-08 | 2005-06-30 | Shipbuild Res Assoc Japan | 形状推定方法および装置ならびに解析要素生成方法および装置 |
| JP2009176185A (ja) * | 2008-01-28 | 2009-08-06 | Toray Ind Inc | 数値解析モデル作成方法および数値解析モデル作成装置 |
-
2008
- 2008-08-29 JP JP2008222027A patent/JP5203100B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005173706A (ja) * | 2003-12-08 | 2005-06-30 | Shipbuild Res Assoc Japan | 形状推定方法および装置ならびに解析要素生成方法および装置 |
| JP2009176185A (ja) * | 2008-01-28 | 2009-08-06 | Toray Ind Inc | 数値解析モデル作成方法および数値解析モデル作成装置 |
Non-Patent Citations (2)
| Title |
|---|
| CSNB200000298001; 有限要素法ハンドブック II 応用編 初版第11刷, 19990410, p.117-121, 株式会社培風館 * |
| JPN6012054520; 有限要素法ハンドブック II 応用編 初版第11刷, 19990410, p.117-121, 株式会社培風館 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016004484A (ja) * | 2014-06-18 | 2016-01-12 | 住友ゴム工業株式会社 | タイヤのシミュレーション方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5203100B2 (ja) | 2013-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10775148B2 (en) | Determining a position of a movable part of a coordinate measuring machine | |
| JP6331517B2 (ja) | 画像処理装置、システム、画像処理方法、および画像処理プログラム | |
| EP1818647B1 (en) | Form measuring instrument, form measuring method and form measuring program | |
| JP5849991B2 (ja) | 自動車車体剛性試験方法および自動車車体剛性試験装置 | |
| US20160291571A1 (en) | System and method for aligning a coordinated movement machine reference frame with a measurement system reference frame | |
| CN105277148B (zh) | 形状测定装置的测定误差的校正方法以及形状测定装置 | |
| EP1536205A2 (en) | Surface scan measuring device and method of forming compensation table for scanning probe | |
| WO2012173141A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP2014128845A (ja) | ロボットシステム表示装置 | |
| CN111132800A (zh) | 机床的机上测定方法及控制装置 | |
| US10697748B2 (en) | Method for controlling shape measuring apparatus | |
| KR101078651B1 (ko) | 곡면 부재 계측 시스템 및 방법 | |
| JP2010145231A (ja) | 対象物の変位測定装置及び方法 | |
| TWI510761B (zh) | 表面多點對焦系統及方法 | |
| JP5553493B2 (ja) | 形状変化測定装置及び方法 | |
| JP5698331B2 (ja) | 射出成型機 | |
| JP5203100B2 (ja) | 構造解析装置及び構造解析方法 | |
| US20230152074A1 (en) | Repeated determination of a position of a movable part of a coordinate measuring machine | |
| CN116075393A (zh) | 控制装置、工业机械以及控制方法 | |
| JP5473710B2 (ja) | 温度推定装置及び解析装置 | |
| JP2020089963A (ja) | ロボットシステムおよび座標変換方法 | |
| CN112805607A (zh) | 计测装置、计测方法和显微镜系统 | |
| KR20000000530A (ko) | 카메라와 레이저 변위 센서를 혼합한 비접촉식 선박용 곡판 부재 계측장치 | |
| JP5516974B2 (ja) | 視覚センサのマウント装置と方法 | |
| TW202327835A (zh) | 具備三維感測器的機器人裝置及機器人裝置的控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120321 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120510 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130111 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5203100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |