JP2010050234A - 電子部品装着装置 - Google Patents
電子部品装着装置 Download PDFInfo
- Publication number
- JP2010050234A JP2010050234A JP2008212241A JP2008212241A JP2010050234A JP 2010050234 A JP2010050234 A JP 2010050234A JP 2008212241 A JP2008212241 A JP 2008212241A JP 2008212241 A JP2008212241 A JP 2008212241A JP 2010050234 A JP2010050234 A JP 2010050234A
- Authority
- JP
- Japan
- Prior art keywords
- mounting
- bumper
- electronic component
- bumpers
- mounting head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Supply And Installment Of Electrical Components (AREA)
Abstract
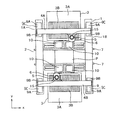
【解決手段】一の部品供給装置3より両装着ヘッド6の吸着ノズル5が同時に取出し動作を行う場合には、2つの装着ヘッド6が干渉して、衝突する危険があるが、各装着ヘッド6を覆うヘッドカバー12にバンパー11が夫々取り付けられると共にこの各バンパー11には検出センサ18が設けられているので、2つの装着ヘッド6が衝突することは回避される。即ち、バンパー11がある距離の範囲内に近づいたことを両バンパー11に設けられた検出センサ18群の中の少なくとも1つが検出して検出信号を出力すると、オア回路32を介して安全回路33に入力され、安全回路33に内臓されたリレー34は直ちに励磁してそのスイッチ34A群を開成させ、電源回路36から駆動回路26C、26Dへの電源が遮断される。
【選択図】図5
Description
2 搬送装置
3 部品供給装置
3B 部品供給ユニット
4A、4B ビーム
5 吸着ノズル
6 装着ヘッド
12 ヘッドカバー
11 バンパー
18 検出センサ
32 オア回路
33 安全回路
34 リレー
34A スイッチ
36 電源回路
Claims (4)
- 対向する一方向に一方向駆動源により移動可能な一対のビームに前記一方向と直交する他方向に夫々他方向駆動源により移動可能な装着ヘッドを設け、該装着ヘッドの吸着ノズルによって部品供給装置より電子部品を吸着してプリント基板上に装着する電子部品装着装置において、前記各装着ヘッドにバンパーを設けると共に、このバンパーの少なくとも一方に他方のバンパーが近づいたことを検出する検出センサを設けたことを特徴とする電子部品装着装置。
- 対向する一方向に一方向駆動源により移動可能な一対のビームに前記一方向と直交する他方向に夫々他方向駆動源により移動可能な装着ヘッドを設け、該装着ヘッドの吸着ノズルによって部品供給装置より電子部品を吸着してプリント基板上に装着する電子部品装着装置において、前記各装着ヘッドにバンパーを設けると共にこのバンパーの少なくとも一方に他方のバンパーが近づいたことを検出する検出センサを設け、この検出センサが他方のバンパーが近づいたことを検出すると前記一方向駆動源及び他方向駆動源の駆動を停止するようにしたことを特徴とする電子部品装着装置。
- 対向する一方向に一方向駆動源により移動可能な一対のビームに前記一方向と直交する他方向に夫々他方向駆動源により移動可能な装着ヘッドを設け、該装着ヘッドの吸着ノズルによって部品供給装置より電子部品を吸着してプリント基板上に装着する電子部品装着装置において、前記各装着ヘッドにバンパーを設けると共にこのバンパーの少なくとも一方に他方のバンパーが近づいたことを検出する検出センサを設け、この検出センサが他方のバンパーが近づいたことを検出すると安全回路が前記一方向駆動源及び他方向駆動源への電源を遮断するようにしたことを特徴とする電子部品装着装置。
- 前記各装着ヘッドに夫々設けられたバンパー同士の対向面に夫々複数の検出センサを設け、前記両バンパーが完全に一致した状態で対向した場合に両バンパーに設けられた複数の検出センサのうち少なくとも1つは対向しないように位置がずれるように配設したことを特徴とする請求項1乃至請求項3のいずれかに記載の電子部品装着装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008212241A JP5166167B2 (ja) | 2008-08-20 | 2008-08-20 | 電子部品装着装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008212241A JP5166167B2 (ja) | 2008-08-20 | 2008-08-20 | 電子部品装着装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010050234A true JP2010050234A (ja) | 2010-03-04 |
| JP5166167B2 JP5166167B2 (ja) | 2013-03-21 |
Family
ID=42067092
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008212241A Active JP5166167B2 (ja) | 2008-08-20 | 2008-08-20 | 電子部品装着装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5166167B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004186545A (ja) * | 2002-12-05 | 2004-07-02 | Juki Corp | 電子部品搭載装置 |
| JP2005159209A (ja) * | 2003-11-28 | 2005-06-16 | Hitachi High-Tech Instruments Co Ltd | 電子部品装着装置 |
-
2008
- 2008-08-20 JP JP2008212241A patent/JP5166167B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004186545A (ja) * | 2002-12-05 | 2004-07-02 | Juki Corp | 電子部品搭載装置 |
| JP2005159209A (ja) * | 2003-11-28 | 2005-06-16 | Hitachi High-Tech Instruments Co Ltd | 電子部品装着装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5166167B2 (ja) | 2013-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5103238B2 (ja) | 電子部品装着装置 | |
| CN102740674A (zh) | 部件安装装置、信息处理装置、位置检测及基板制造方法 | |
| US9167701B2 (en) | Method of mounting electronic component | |
| CN102783274A (zh) | 部件安装装置和部件安装方法 | |
| JP2008186992A (ja) | 電子部品装着装置 | |
| JP5166167B2 (ja) | 電子部品装着装置 | |
| KR101759633B1 (ko) | 부품 실장 장치, 부품 실장 방법 | |
| JPH1168395A (ja) | 表面実装機 | |
| US20050259862A1 (en) | Device and method for recognizing recognition marks for component placement | |
| JP6230604B2 (ja) | 作業機 | |
| EP4037451B1 (en) | Automated replacement system for production line | |
| JP5147466B2 (ja) | 電子部品装着装置 | |
| JP5113792B2 (ja) | 電子部品装着装置 | |
| JP2003243890A (ja) | 部品実装装置、部品実装ヘッド干渉回避制御方法、及び部品実装ヘッド干渉回避制御プログラム | |
| CN121368517A (zh) | 印刷系统 | |
| US11129321B2 (en) | Movement error detection apparatus of mounting head, and component mounting apparatus | |
| JP2003318600A (ja) | 電子部品装着装置の認識方法及びその認識装置 | |
| US12114431B2 (en) | Component supply apparatus | |
| JP5321474B2 (ja) | 部品実装装置および部品実装方法 | |
| JP5075096B2 (ja) | 電子部品装着装置 | |
| JP2008258539A (ja) | 実装機および実装機におけるコンベア幅調整時の干渉防止方法 | |
| JP6371129B2 (ja) | 部品実装機 | |
| WO2013172054A1 (ja) | 基板作業装置 | |
| JP2010080461A (ja) | 電子部品の装着方法 | |
| JP5113703B2 (ja) | 電子部品装着装置及び基板組立作業ライン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120507 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120822 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121220 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5166167 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |