JP2010042921A - ロール移載装置 - Google Patents
ロール移載装置 Download PDFInfo
- Publication number
- JP2010042921A JP2010042921A JP2008209434A JP2008209434A JP2010042921A JP 2010042921 A JP2010042921 A JP 2010042921A JP 2008209434 A JP2008209434 A JP 2008209434A JP 2008209434 A JP2008209434 A JP 2008209434A JP 2010042921 A JP2010042921 A JP 2010042921A
- Authority
- JP
- Japan
- Prior art keywords
- roll
- transfer device
- core
- shelf
- shuttle mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 79
- 238000001514 detection method Methods 0.000 claims abstract description 35
- 239000000725 suspension Substances 0.000 claims abstract description 24
- 230000003287 optical effect Effects 0.000 claims description 19
- 230000003028 elevating effect Effects 0.000 abstract description 4
- 230000000717 retained effect Effects 0.000 abstract 2
- 238000000034 method Methods 0.000 description 9
- 238000006073 displacement reaction Methods 0.000 description 7
- 230000008602 contraction Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000005299 abrasion Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- 238000007646 gravure printing Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images







Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
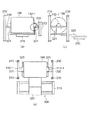
【解決手段】移載装置は、中心にあるコアがロールの両端から突出するロール100を、懸架保持手段の棚受け220とで受け渡しを行なう。本移載装置は、昇降及び走行機構とロールの突出部を受ける2つのコア受け部とを備え、棚受けで保持されているロールの突出部の下側に進入、退出させるシャトル機構40と、該シャトル機構を、棚受けにあるロールの中心軸と平行な水平方向にスライドさせるスライドテーブル30を持つスライド機構と、棚受けで保持されているロールの中心軸方向への位置ずれを検出する第1の位置ずれ検出手段と、その検出結果によりスライド機構を制御して、ロールの位置ずれに応じてシャトル機構の位置補正を行なう制御手段を備える。
【選択図】図2
Description
この場合の停止位置決めは、これまでの番地板を検出して停止位置を決める制御、あるいは測距センサーを用いて原点位置からの距離情報を元に停止位置を決める制御を採用することができる。この停止位置決め状態は、コア110(ロール100)が2つの棚受け220上で軸方向に位置ずれしていた場合にその影響を受けることになるので、後述するシャトル機構40の位置決め補正を必要とするが、上下方向に関しては位置補正の必要の無い精度で停止している。
L1=L2+2α
20 昇降台
30 スライドテーブル
31 センサー用架台
32 光電センサー
33 棚位置センサー
40 シャトル機構
41 コア受け
100 ロール
110 コア
110−1 突出部
210 棚柱
220 棚受け
Claims (6)
- 中心にコアを持つロールであって前記コアが該ロールの両端から突き出た突出部を有するロールを、該ロールの懸架保持手段との間で受け渡しを行なうための移載装置であって、昇降及び走行機構と前記ロールの両側の前記突出部を受けるための2つのコア受け部を備えたロール移載装置において、
前記2つのコア受け部を、前記懸架保持手段で保持されているロールの前記突出部の下側に進入、退出させるシャトル機構と、
該シャトル機構を、前記懸架保持手段で保持されているロールの中心軸と平行な水平方向にスライドさせるスライドテーブルを持つスライド機構と、
前記懸架保持手段で保持されているロールの前記中心軸方向への位置ずれを検出する第1の位置ずれ検出手段と、
前記第1の位置ずれ検出手段の検出結果に基づいて前記スライド機構を制御して、前記ロールの位置ずれに応じて前記シャトル機構の位置補正を行なう制御手段と、
を備えたことを特徴とするロール移載装置。 - 前記懸架保持手段は、前記ロールの両側の前記突出部を載せた状態で受ける2つの受け部から成り、しかも該受け部の先端と前記ロールの端面との間には隙間ができるようにされており、
前記第1の位置ずれ検出手段は、前記懸架保持手段で保持されているロールの前記突出部の前記中心軸方向への位置ずれを検出するものであり、
前記制御手段は、前記第1の位置ずれ検出手段の検出結果に基づいて前記スライド機構を制御して、前記2つのコア受け部が前記懸架保持手段で保持されているロールの前記突出部の真下に進入可能となるように、前記シャトル機構の位置補正を行なうことを特徴とする請求項1に記載のロール移載装置。 - 前記シャトル機構は、前記昇降及び走行機構により昇降及び走行可能なテーブルに前記スライド機構を介して搭載されていることを特徴とする請求項1又は2に記載のロール移載装置。
- 前記第1の位置ずれ検出手段は、前記スライドテーブルに前記コアの長さL2よりも大き目の間隔L1をおいて上方に延びるように立設されたセンサー用架台に設けた発光及び受光機能を持つ2つの第1の光センサーと、該第1の光センサーからの光を該第1の光センサー側に反射させるように前記2つの受け部のそれぞれに設けた2つの第1の反射板とを含み、前記第1の光センサーとこれに対応する前記第1の反射板との位置関係を、前記ロールの前記突出部が前記中心軸方向へ位置ずれを生じている時に、一方の前記突出部により前記第1の光センサーから対応する前記第1の反射板への光が遮られるような位置関係にしてあることを特徴とする請求項2に記載のロール移載装置。
- 更に、前記シャトル機構の前記ロールの中心軸と平行な水平方向への位置ずれを検出する第2の位置ずれ検出手段を備え、
前記制御手段は、前記第2の位置ずれ検出手段の検出結果に基づいて前記スライド機構を制御して、前記シャトル機構の位置決め補正を行なうことにより、前記シャトル機構の前記進入に際しての前記コア受け部と前記受け部との干渉を防止することを特徴とする請求項2に記載のロール移載装置。 - 前記受け部は上下方向に延びる複数の柱を利用して構成され、
前記第2の位置ずれ検出手段は、前記スライドテーブルに設けた2光軸の発光及び受光機能を持つ第2の光センサーと、該第2の光センサーからの2光軸の光を該第2の光センサー側に反射させるように、前記スライドテーブルに近い方の前記柱に設けた第2の反射板とを含むことを特徴とする請求項5に記載のロール移載装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209434A JP5294450B2 (ja) | 2008-08-18 | 2008-08-18 | ロール移載装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209434A JP5294450B2 (ja) | 2008-08-18 | 2008-08-18 | ロール移載装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010042921A true JP2010042921A (ja) | 2010-02-25 |
| JP5294450B2 JP5294450B2 (ja) | 2013-09-18 |
Family
ID=42014640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008209434A Active JP5294450B2 (ja) | 2008-08-18 | 2008-08-18 | ロール移載装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5294450B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021502940A (ja) * | 2017-11-14 | 2021-02-04 | ハイ ロボティクス カンパニー リミテッドHai Robotics Co., Ltd. | 倉庫用自動ガイド車両 |
| US11396424B2 (en) | 2017-11-14 | 2022-07-26 | Hai Robotics Co., Ltd. | Handling robot |
| US11465840B2 (en) | 2017-11-14 | 2022-10-11 | Hai Robotics Co., Ltd. | Handling robot |
| US11542135B2 (en) | 2019-02-01 | 2023-01-03 | Hai Robotics Co., Ltd. | Handling robot |
| US11597598B2 (en) | 2019-02-01 | 2023-03-07 | Hai Robotics Co., Ltd. | Handling robot |
| US11655099B2 (en) | 2017-11-14 | 2023-05-23 | Hai Robotics Co., Ltd. | Handling robot |
| US12103771B2 (en) | 2017-11-14 | 2024-10-01 | Hai Robotics Co., Ltd. | Handling robot |
| US12330870B2 (en) | 2017-11-14 | 2025-06-17 | Hai Robotics Co., Ltd. | Handling robot |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DK1994997T3 (da) | 2002-01-17 | 2012-01-02 | Quide B V | Fremgangsmåde og formemaskine til fremstilling af et produkt med forskellige diametre |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53153689U (ja) * | 1977-05-10 | 1978-12-02 | ||
| JPH0398901A (ja) * | 1989-09-13 | 1991-04-24 | Toyota Motor Corp | 自動倉庫 |
| JP2000238904A (ja) * | 1999-02-18 | 2000-09-05 | Sumitomo Heavy Ind Ltd | スタッカクレーン |
| JP2004099208A (ja) * | 2002-09-05 | 2004-04-02 | Toyota Industries Corp | スタッカクレーンの荷位置の異常検出方法 |
| JP2007137605A (ja) * | 2005-11-18 | 2007-06-07 | Daifuku Co Ltd | ロール状物品用の収納設備 |
-
2008
- 2008-08-18 JP JP2008209434A patent/JP5294450B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53153689U (ja) * | 1977-05-10 | 1978-12-02 | ||
| JPH0398901A (ja) * | 1989-09-13 | 1991-04-24 | Toyota Motor Corp | 自動倉庫 |
| JP2000238904A (ja) * | 1999-02-18 | 2000-09-05 | Sumitomo Heavy Ind Ltd | スタッカクレーン |
| JP2004099208A (ja) * | 2002-09-05 | 2004-04-02 | Toyota Industries Corp | スタッカクレーンの荷位置の異常検出方法 |
| JP2007137605A (ja) * | 2005-11-18 | 2007-06-07 | Daifuku Co Ltd | ロール状物品用の収納設備 |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12103771B2 (en) | 2017-11-14 | 2024-10-01 | Hai Robotics Co., Ltd. | Handling robot |
| US11794995B2 (en) | 2017-11-14 | 2023-10-24 | Hai Robotics Co., Ltd. | Handling robot |
| US11465840B2 (en) | 2017-11-14 | 2022-10-11 | Hai Robotics Co., Ltd. | Handling robot |
| JP7787274B2 (ja) | 2017-11-14 | 2025-12-16 | ハイ ロボティクス カンパニー リミテッド | 自動ガイド車両及び方法 |
| KR20230012102A (ko) * | 2017-11-14 | 2023-01-25 | 하이 로보틱스 씨오., 엘티디. | 운반 로봇 및 운반 로봇에 기반한 픽업 방법 |
| US12330870B2 (en) | 2017-11-14 | 2025-06-17 | Hai Robotics Co., Ltd. | Handling robot |
| JP2023041865A (ja) * | 2017-11-14 | 2023-03-24 | ハイ ロボティクス カンパニー リミテッド | 倉庫用自動ガイド車両 |
| US11655099B2 (en) | 2017-11-14 | 2023-05-23 | Hai Robotics Co., Ltd. | Handling robot |
| US11718472B2 (en) | 2017-11-14 | 2023-08-08 | Hai Robotics Co., Ltd. | Automated guided vehicle designed for warehouse |
| US12291396B2 (en) | 2017-11-14 | 2025-05-06 | Hai Robotics Co., Ltd. | Method for controlling warehouse robot to store and fetch inventory materials |
| US11396424B2 (en) | 2017-11-14 | 2022-07-26 | Hai Robotics Co., Ltd. | Handling robot |
| US11794996B2 (en) | 2017-11-14 | 2023-10-24 | Hai Robotics Co., Ltd. | Handling robot |
| KR102568369B1 (ko) | 2017-11-14 | 2023-08-21 | 하이 로보틱스 씨오., 엘티디. | 운반 로봇 및 운반 로봇에 기반한 픽업 방법 |
| JP2025015659A (ja) * | 2017-11-14 | 2025-01-30 | ハイ ロボティクス カンパニー リミテッド | 自動ガイド車両及び方法 |
| US12006143B2 (en) | 2017-11-14 | 2024-06-11 | Hai Robotics Co., Ltd. | Handling robot |
| JP2021502940A (ja) * | 2017-11-14 | 2021-02-04 | ハイ ロボティクス カンパニー リミテッドHai Robotics Co., Ltd. | 倉庫用自動ガイド車両 |
| US12139335B2 (en) | 2017-11-14 | 2024-11-12 | Hai Robotics Co., Ltd. | Handling robot |
| JP7590473B2 (ja) | 2017-11-14 | 2024-11-26 | ハイ ロボティクス カンパニー リミテッド | 倉庫用自動ガイド車両 |
| US12006196B2 (en) | 2019-02-01 | 2024-06-11 | Hai Robotics Co., Ltd. | Handling robot |
| US11851278B2 (en) | 2019-02-01 | 2023-12-26 | Hai Robotics Co., Ltd. | Handling robot |
| US11597598B2 (en) | 2019-02-01 | 2023-03-07 | Hai Robotics Co., Ltd. | Handling robot |
| US11542135B2 (en) | 2019-02-01 | 2023-01-03 | Hai Robotics Co., Ltd. | Handling robot |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5294450B2 (ja) | 2013-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5294450B2 (ja) | ロール移載装置 | |
| US7729797B2 (en) | Article transport apparatus for an article storage system, and a method of operating the apparatus | |
| CN103052572B (zh) | 板状构件移载设备 | |
| KR101130124B1 (ko) | 물품 반송 장치와 물품 위치 오차 검출 방법 | |
| TW200922853A (en) | Automatic roll feeder | |
| JP2008044732A (ja) | 物品収納設備 | |
| KR101876255B1 (ko) | 스태커 크레인 | |
| CN203040105U (zh) | 基板停止装置 | |
| JP4967069B1 (ja) | ロール体搬送装置 | |
| JP2018028217A (ja) | 定位置検出装置とこれを用いたエレベータ式駐車装置 | |
| JP2008074613A (ja) | 移載システム | |
| JP2008214006A (ja) | ロール体搬送装置 | |
| JP5762347B2 (ja) | ロール体搬送装置 | |
| JP4401829B2 (ja) | スタッカークレーンの自動ティーチング装置 | |
| US20220227578A1 (en) | Stacker Crane Control System | |
| JP5150003B1 (ja) | ロール体取扱システム、ロール体供給方法およびロール体搬送装置 | |
| JP2006103908A (ja) | スタッカクレーン | |
| JP4926895B2 (ja) | スタッカクレーンの自動ティーチング方法 | |
| JPH0969548A (ja) | 薄型基板の搬送装置 | |
| JP5152171B2 (ja) | スタッカークレーン及びスタッカークレーンの制御方法 | |
| JP2009166987A (ja) | 自動倉庫用スタッカークレーンにおける姿勢制御装置 | |
| WO2013035250A1 (ja) | ロール体取扱システム、ロール体供給方法およびロール体搬送装置 | |
| JP2000318806A (ja) | 自動倉庫における荷の移載位置検出装置 | |
| TWI526381B (zh) | Transport car | |
| JP6756397B2 (ja) | 物品搬送車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111130 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120127 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120411 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120710 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120718 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20120817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130426 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5294450 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |