JP2010042135A - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP2010042135A JP2010042135A JP2008207972A JP2008207972A JP2010042135A JP 2010042135 A JP2010042135 A JP 2010042135A JP 2008207972 A JP2008207972 A JP 2008207972A JP 2008207972 A JP2008207972 A JP 2008207972A JP 2010042135 A JP2010042135 A JP 2010042135A
- Authority
- JP
- Japan
- Prior art keywords
- sewing
- sewing machine
- needle
- guide
- substantially perpendicular
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Sewing Machines And Sewing (AREA)
Abstract
複数のミシン針をそれぞれ独立して往復動させ、各ミシン針によって形成される縫い目の形状を異ならせることができるミシンを提供する。
【解決手段】
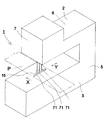
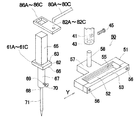
ミシン本体2の駆動装置によって往復動する針棒41の先部には、ガイド部材51が固定されている。ガイド部材51には、ミシン針71を固定した複数の取付部材61A〜61Cを縫製方向Xと略直角の方向Yに案内する案内部52が形成されている。各取付部材61A〜61Cは、ミシン本体2に設けられた複数の動作手段A〜Cにそれぞれ連結部材80A〜80Cによって連結され、各動作手段A〜Cの作動により各ミシン針71を縫製方向Xと略直角の方向Yに往復動するように構成されている。
【選択図】 図2
Description
さらに、従来複数のミシン針を針棒の先端に取り付け、複数の縫い目を平行に形成するミシンが存在した(例えば、特許文献2)。
従って、特許文献2に記載された発明を特許文献1の発明に採用すれば、被縫製物に複数の千鳥縫いを略同時に行うミシンを形成することができる。
(1)複数のミシン針が振り子状に振れながら被縫製物を縫うため、複数のミシン針が被縫製物を斜めに貫通し、薄手の布地等の縫製素材の場合はスムーズに縫製を行うことができるが、皮革等の厚手の縫製素材の場合はミシン針が曲がって貫通し難く、スムーズに縫製を行うことができない。
(2)複数のミシン針の内の真ん中のミシン針のループは、ミシン針が振られても垂直釜の剣先によって容易に引っ掛けることができるが、両側のミシン針のループは、ミシン針が振られると垂直釜から離れていくので、垂直釜の剣先に引っ掛かり難い。
(3)複数のミシン針の間隔が一定であるため、複数のミシン針の縫製によって形成される縫い目の間隔が一定であり、縫い目の間隔を調節することができない。
(4)複数のミシン針によって形成される縫い目の形状は全て同じであり、一つだけを別の形状にすることができない。
この本縫いは、サーボモータA〜Cを動作させない場合には、図6(a)に示すように、各ミシン針71によって、等間隔で直線状の本縫い目9A,9B,9Cが平行に形成される。縫い目9Aは、取付部材61Aに取り付けられたミシン針71によって形成され、縫い目9Bは、取付部材61Bに取り付けられたミシン針71によって形成され、縫い目9Cは、取付部材61Cに取り付けられたミシン針71によって形成されている。
回動部材85A,85Bを回動して連結部材80A,80Bを縮め、取付部材61A、Bを取付部材61Cから離間させて、上記縫製を行うことができる。なお、回動部材85A,85Bを回動せず、サーボモータA,Bを動作させて、取付部材61A、Bを取付部材61Cから離間させても良い。このようにすると、図6(c)に示すように、直線状の縫い目9A、9Bが縫い目9Cから離れた形で平行に形成される。
回動部材85Aを回動して連結部材80Aを伸ばして取付部材61Aを取付部材61Bに接近させ、回動部材85Cを回動して連結部材80Cを縮めて取付部材61Cを取付部材61Bに接近させて、上記縫製を行うことができる。なお、回動部材85A,85Cを回動せず、サーボモータA,Cを動作させて、取付部材61A、Cを取付部材61Bに接近させても良い。このようにすると、図6(d)に示すように、直線状の縫い目9A、9B、9Cが接近した形で平行に形成される。
図6(b)の状態で、右端のサーボモータAのみを作動させると、回転円板87A、連結ピン88A、楕円環83A、連結軸81A、連結板82Aを介して取付部材61Aが縫製方向Xと略直角の方向Yに向かって往復動することになり、図6(g)に示すように、右端の縫い目9Aが千鳥縫いとなる。
図6(d)の状態で、左端のサーボモータCのみを作動させると、回転円板87C、連結ピン88C、楕円環83C、連結軸81C、連結板82Cを介して取付部材61Cが縫製方向Xと略直角の方向Yに向かって往復動することになり、図6(h)に示すように、左端の縫い目9Cが千鳥縫いとなる。
図6(b)の状態で、サーボモータA,B,Cを作動させると、取付部材61A,61B,61Cが縫製方向Xと略直角の方向Yに向かって往復動することになり、図6(j)に示すように、縫い目9A,9B,9Cが千鳥縫いとなる。なお、縫い目9Aと縫い目9Bは、離間している状態が維持されている。
図6(d)の状態で、サーボモータA,Cを作動させると、取付部材61A,61Cが縫製方向Xと略直角の方向Yに向かって往復動することになり、図6(k)に示すように、縫い目9A,9Cが千鳥縫いなる。
なお、上記実施の形態では、各取付部材61A,61B,61Cは、サーボモータA〜Cによって移動させられるようになっているが、ミシン本体2内の駆動装置と、当該駆動装置によって作動するカム機構とによって構成される動作手段により、それぞれ移動させられるように構成しても構わない。
即ち、回転円板87A〜87Cの中心に近い差込孔89に連結ピン88A〜88Cを差し込めば、縫い目9A〜9Cの千鳥縫い幅が狭くなり、回転円板87A〜87Cの中心から遠い差込孔89に連結ピン88A〜88Cを差し込めば、縫い目9A〜9Cの千鳥縫い幅が広くなる。
B サーボモータ
C サーボモータ
P 被縫製物
R 回転方向
X 縫製方向
Y 往復方向
1 ミシン
2 ミシン本体
3 下部フレーム
5 垂直フレーム
6 上部フレーム
7 前部フレーム
9A 縫い目
9B 縫い目
9C 縫い目
11 垂直釜
13 上壁
15 針挿通孔
21 駆動軸
22 駆動歯車
23 中間歯車
31 従動軸
32 従動歯車
33 回転体
35 偏心ピン
37 クランクアーム
38 軸受けボス
39 軸受けボス
41 針棒
42 ピン
43 差込孔
45 止めネジ
50 ミシン針装置
51 案内枠(ガイド部材)
52 案内路(案内部)
53 ガイド孔
55 案内溝
56 ネジ
57 突片
58 差込軸
61 取付部材
61A 取付部材
61B 取付部材
61C 取付部材
62 ガイド板
63 上端面
65 ガイド軸
66 下端面
67 装着軸
68 装着孔
69 ネジ穴
70 止めネジ
71 ミシン針
80A 連結部材
80B 連結部材
80C 連結部材
81A 連結軸
81B 連結軸
81C 連結軸
82A 連結板
82B 連結板
82C 連結板
82D 連結板
82E 連結板
82F 連結板
83A 楕円環
83B 楕円環
83C 楕円環
85A 回動部材
85B 回動部材
85C 回動部材
86A 矩形孔
86B 矩形孔
86C 矩形孔
86D 矩形孔
86E 矩形孔
86F 矩形孔
87A 回転円板
87B 回転円板
87C 回転円板
88A 連結ピン
88B 連結ピン
88C 連結ピン
89 差込孔
Claims (2)
- 被縫製物に千鳥縫いを行うミシンであって、
ミシン本体の駆動装置によって上下方向に往復動する針棒の先部には、ガイド部材が固定され、
当該ガイド部材には、ミシン針を固定した取付部材を縫製方向と略直角の方向に案内する案内部が形成されており、
前記取付部材は、ミシン本体に設けられた動作手段に連結部材によって連結され、動作手段の作動によりミシン針を縫製方向と略直角の方向に往復動するように構成され、
前記ミシン本体内には、前記ミシン針の針糸のループを引っ掛ける垂直釜が設けられていることを特徴とするミシン。 - 被縫製物に千鳥縫いを行うミシンであって、
ミシン本体の駆動装置によって上下方向に往復動する針棒の先部には、ガイド部材が固定され、
当該ガイド部材には、ミシン針を固定した複数の取付部材を縫製方向と略直角の方向に案内する案内部が形成されており、
前記各取付部材は、ミシン本体に設けられた複数の動作手段にそれぞれ連結部材によって連結され、各動作手段の作動により各ミシン針を縫製方向と略直角の方向に往復動するように構成され、
前記ミシン本体内には、前記複数のミシン針の針糸のループを引っ掛ける垂直釜が設けられていることを特徴とするミシン。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207972A JP5501584B2 (ja) | 2008-08-12 | 2008-08-12 | ミシン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207972A JP5501584B2 (ja) | 2008-08-12 | 2008-08-12 | ミシン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010042135A true JP2010042135A (ja) | 2010-02-25 |
| JP5501584B2 JP5501584B2 (ja) | 2014-05-21 |
Family
ID=42014018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008207972A Expired - Fee Related JP5501584B2 (ja) | 2008-08-12 | 2008-08-12 | ミシン |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5501584B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108221187A (zh) * | 2016-12-21 | 2018-06-29 | 杰克缝纫机股份有限公司 | 多样线迹可调的包缝机及包边线迹调整方法 |
| CN108221186A (zh) * | 2016-12-21 | 2018-06-29 | 杰克缝纫机股份有限公司 | 针幅可调的包缝机及所缝线迹调整方法 |
| CN108660625A (zh) * | 2018-05-08 | 2018-10-16 | 浙江众邦机电科技有限公司 | 加固缝参数计算方法及应用该方法的控制系统及缝纫机 |
| JP2023092967A (ja) * | 2021-12-22 | 2023-07-04 | 東海機器工業株式会社 | 畳用縫着装置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2354783A (en) * | 1940-06-03 | 1944-08-01 | K & P Fancy Stitching Machine | Sewing machine |
-
2008
- 2008-08-12 JP JP2008207972A patent/JP5501584B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2354783A (en) * | 1940-06-03 | 1944-08-01 | K & P Fancy Stitching Machine | Sewing machine |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108221187A (zh) * | 2016-12-21 | 2018-06-29 | 杰克缝纫机股份有限公司 | 多样线迹可调的包缝机及包边线迹调整方法 |
| CN108221186A (zh) * | 2016-12-21 | 2018-06-29 | 杰克缝纫机股份有限公司 | 针幅可调的包缝机及所缝线迹调整方法 |
| CN108660625A (zh) * | 2018-05-08 | 2018-10-16 | 浙江众邦机电科技有限公司 | 加固缝参数计算方法及应用该方法的控制系统及缝纫机 |
| CN108660625B (zh) * | 2018-05-08 | 2020-04-14 | 浙江众邦机电科技有限公司 | 加固缝参数计算方法及应用该方法的控制系统及缝纫机 |
| JP2023092967A (ja) * | 2021-12-22 | 2023-07-04 | 東海機器工業株式会社 | 畳用縫着装置 |
| JP7685229B2 (ja) | 2021-12-22 | 2025-05-29 | 東海機器工業株式会社 | 畳用縫着装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5501584B2 (ja) | 2014-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4857318B2 (ja) | 刺繍機のシークイン供給装置及び刺繍機 | |
| CN101307532A (zh) | 刺绣缝纫机的压脚的离合结构 | |
| JP5501584B2 (ja) | ミシン | |
| JP2006122436A (ja) | 刺繍ミシン | |
| JP4261698B2 (ja) | ミシンの布送り機構 | |
| CN104818587A (zh) | 缝纫机 | |
| JP2010213767A (ja) | ミシンの糸切り装置 | |
| JP2006223708A (ja) | ミシン及び鳩目穴かがりミシン | |
| CN208038716U (zh) | 双链缝缝纫机 | |
| JPH11342281A (ja) | ミシン | |
| CN101173426B (zh) | 圆头锁眼缝纫机及控制装置 | |
| TWM541477U (zh) | 高頭柱型的多針縫紉機 | |
| JP7759669B2 (ja) | ミシンの釜構造及びミシン | |
| JP4632081B2 (ja) | 縁かがりミシン | |
| JPH09140971A (ja) | ミシン | |
| JP4650169B2 (ja) | 鳩目穴かがりミシン | |
| JP4105817B2 (ja) | ミシンの布送り機構 | |
| CN212771292U (zh) | 一种双排绗绣机 | |
| CN202945443U (zh) | 带料绣做打褶装置 | |
| CN211112522U (zh) | 一种曲臂式缝纫机用双线拼接针线压脚装置 | |
| JP2003169982A (ja) | 飾り縫いミシン | |
| JP2007029433A (ja) | 穴かがり縫いミシン | |
| CN103850071A (zh) | 带料绣做打褶装置 | |
| CN222100335U (zh) | 一种多针缝纫机的剪线机构 | |
| JP2004113431A (ja) | ミシン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130419 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20131218 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5501584 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |