JP2010032090A - 飛しょう体の誘導方法及び誘導装置 - Google Patents
飛しょう体の誘導方法及び誘導装置 Download PDFInfo
- Publication number
- JP2010032090A JP2010032090A JP2008193592A JP2008193592A JP2010032090A JP 2010032090 A JP2010032090 A JP 2010032090A JP 2008193592 A JP2008193592 A JP 2008193592A JP 2008193592 A JP2008193592 A JP 2008193592A JP 2010032090 A JP2010032090 A JP 2010032090A
- Authority
- JP
- Japan
- Prior art keywords
- target
- flying object
- turning direction
- flying
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Navigation (AREA)
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
Abstract
【解決手段】目標の位置、速度及び種類を表す情報からなる目標情報を取得するステップと、目標の種類情報に基づき、飛しょう体1が、目標と会合するまでの飛しょう時間を最短とする飛しょう経路、あるいは目標に会合する際の残速を最大とする飛しょう経路のいづれの経路をとるかを選択するステップと、選択した飛しょう経路に対応し、所定の位置に到達するまでの飛しょう時間と発射直後の旋回方向とを表にした射表を取得するステップと、目標の位置と速度と射表とから、目標と飛しょう体とが会合する会合点を算出するステップと、会合点に基づき射表から旋回方向を抽出するステップと、発射直後の飛しょう体の旋回方向が抽出した旋回方向となるように飛しょう体を制御するステップとを備える。
【選択図】図2
Description
しかしながら上述の制御方法においては、一つの最終目標点に対し一組の飛しょう経路データしか設定されていないため、目標の類別に応じた最適な飛しょう経路へと飛しょう体を誘導することができないという課題があった。
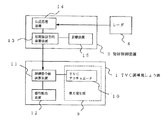
以下、この発明の実施の形態1の誘導方法を図参照して説明する。図1はTVC誘導飛しょう体の誘導方法を説明する図であり、誘導システムとしてTVC誘導飛しょう体1と、TVC誘導飛しょう体1を発射する発射機2と、発射機2側に装備された発射制御装置3と、レーダ4から構成される。
5はTVCによる初期旋回が終了した後のTVC誘導飛しょう体を表しており、γcはTVCによる姿勢変更終了後にTVC誘導飛しょう体が取るべき飛行方向(初期旋回方向γc)、6はTVC誘導飛しょう体と目標7との予想会合点、8は発射制御装置3とレーダ4の間の通信を媒介するデータリンクである。
発射制御装置3は、飛しょう体の初期旋回方向を演算する初期旋回方向演算装置13と伝送処理装置14と記憶装置15とからなる。
伝送処理装置14は、レーダ4から少なくとも目標7の位置、速度、方向および目標7の種類(航空機、巡航ミサイル、空対地ミサイルなど)を表す目標情報を、データリンク8を介して受信する。
記憶装置15には、空間上の点となる目標点とこの目標点に到達するまでの飛しょう時間を最短とする飛しょう経路を飛行させるための初期旋回方向γcとが関連付けられた射表(以下、飛しょう時間を最短とする射表100という)が記憶されている。また、記憶装置15には、目標点とこの目標点への到達時の存速を最大とする飛しょう経路を飛行させるための初期旋回方向γcが関連付けられた射表(以下、存速を最大とする射表101という)とが保存されている。
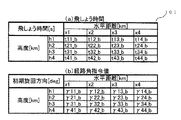
図3(a)は、発射機2からの高度(縦軸)と水平距離(横軸)で示される地点までの飛しょう時間が最短となる時間を表にしたものであり、図3(b)はそのときの初期旋回方向γcを、図3(a)の高度、水平距離と関連付けて表に表したものである。例えば、発射機2から水平距離x2[km]、高度h2[km]の地点に、飛しょう体1が到達する最短の飛しょう時間はt22_a[s]であり、そのときの飛しょう体1がとるべき初期旋回方向γcはγ22_a[deg]であることを示している。
図3(a)、(b)の結果は、飛しょう体1の諸元に基づき最適化手法等により予め演算されるものであり、飛しょう体1の機種が変われば当然に、図3の内容も異なったものである。なお、設定した初期旋回方向γcの向きで発射した飛しょう体1は、その後、例えば比例航法などにより目的とする地点に向かって飛しょうする。
図4(a)は、発射機2からの高度(縦軸)と水平距離(横軸)で示される地点に存速が最大となるように飛しょうしたときの飛しょう時間を表にしたものである。図4(b)はそのときの初期旋回方向γcを、図4(a)の高度、水平距離と関連付けて表に表したものである。例えば、発射機2から水平距離x2[km]、高度h2[km]の地点に向けて、飛しょう体1の存速が最大となるように飛しょうするときの初期旋回方向γcはγ22_bであり、飛しょう体1がその地点に到達するまでの飛しょう時間はt22_b[s]となる。
図4(a)、(b)の結果は、飛しょう体1の諸元に基づき最適化手法等により予め演算されるものであり、飛しょう体1の機種が変われば当然に図4の内容も異なったものとなる。
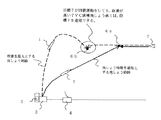
存速を大きくするため、TVC誘導飛しょう体1はまず空気抵抗の少ない上空に向けて飛び出し、空気抵抗の少ない空間を飛しょうする。その後、目標地点に近づいた時点で高度を下げるようにすることで存速を大きくすることができる。このため、図3で説明した飛しょう時間を最短とする場合の飛しょう経路と比べると、遠回りをすることになり、所定の地点到達までの飛しょう時間は余計に要することになる。
なお、設定した初期旋回方向γcで発射した飛しょう体1は、その後、比例航法などの航法計算により目的とする地点に向かって飛しょうする。
初期旋回方向演算装置13は、目標の種類とその目標の回避運動の可能性の大小を経験的に対応付けした対応表を持っており、レーダ4から送られてくる目標とこの対応表により、目標の回避運動の有無を判断する。
例えば目標が航空機の場合、飛しょう体1が接近していることを目視により察知し、あるいは航空機に搭載したレーダ4などで察知した場合、飛しょう体を回避するための旋回運動を行う可能性が高いと判断する。
一方、目標が巡航ミサイルや空対地ミサイルなどの場合は、向かってくる飛しょう体の接近を察知する手段を持たず、回避運動を行わない可能性が高いと判断する。
そして、記憶装置15に保存された射表から目標の回避運動の有無に応じた適切な射表を一つ選択し、選択された射表と目標情報に基づいて初期旋回方向γcを演算する。
まず、レーダ4は目標7を捕捉し、目標7の位置、速度および類別を含む情報を目標情報として得る(図5のS001)。
レーダ4は目標7の目標情報を発射制御装置3へ送信する(S002)。
初期旋回方向演算装置13は目標情報に含まれる類別情報に基づいて目標が回避運動を行うのか否かを推定する(S003)。回避運動を行うか否かの判断は、先に説明したように、初期旋回方向演算装置13は目標の種類とその目標の回避運動の可能性の大小を経験的に対応付けした対応表を持っており、レーダ4から送られてくる目標とこの対応表により、目標の回避運動の有無を判断する(S004)。
一方、S004において、目標が回避運動を行わないと推定された場合は、記憶装置15に保存されている射表のうち飛しょう時間を最短とする射表101(図3)を選択する(S006)。
これは、回避運動を行う目標に対処する場合は、目標の避運動へ追従するために目標との会合までに高い存速を保持しておくことが必要とされることによる。また、回避運動を行わない目標に対処する場合は存速を犠牲にしてでもできるだけ早く目標へと到達して要撃範囲を拡大することが必要とされるためである。
初期旋回方向演算装置13は目標情報から、目標7の位置と速度とその進行方向を得る。初期旋回方向演算装置13は目標の位置、速度、方向を一定として、所定時間後の目標の位置を算出でき、一方、選択された射表からは、算出した目標位置に到達するまでの飛しょう時間を知ることができる。予想会合点6は、S005あるいはS006で選択した射表100または101と、レーダが取得した目標の位置と速度と向きの情報をもとに演算される。予想会合点6は、TVC誘導飛しょう体1が飛しょう時間および目標7がその目標に到達するのに要する時間のそれぞれが等しくなる空間上の点として求められる。なお、予想会合点6(水平距離、高度)の演算プログラムは予め初期旋回方向演算装置13に格納されており、予想会合点6は射表100、101の水平距離と高度を補完することにより、精度よく算出することができる。
次いで、初期旋回方向演算装置13は、飛しょう時間を最短とする射表を選択している場合には図3(b)を、あるいは、存速を最大とする射表を選択している場合には図4(b)を用いて、予想会合点6に対する初期旋回方向γcを演算する(S007)。
発射後、TVC誘導飛しょう体1は、旋回方向が初期旋回方向γcとなるように姿勢制御を開始する。具体的には、制御指令値演算装置11は初期旋回方向γcおよび慣性航法装置12からのTVC誘導飛しょう体1の飛行方向、姿勢情報に基づいてアクチュエータ指令値を演算し、TVCアクチュエータ10へアクチュエータ指令値を入力してTVC誘導飛しょう体1にモーメント及び推力を発生させる。これにより、TVC誘導飛しょう体1の飛行方向が初期旋回方向γcと一致するように制御される(S009)。
その後TVC誘導飛しょう体1は、例えば比例航法によって目標7に向けて飛しょうする(S010)。
回避運動を行う目標7に対しては、目標7への到達時の存速が最大となる飛しょう経路をとることとなるため、目標7が回避運動を行った際にも残速が大きいために、進路変更が可能で目標7への衝突確率が向上する。
また、回避運動を行わない目標7に対しては、目標7へ到達するまでの飛しょう時間が最短となる飛しょう経路を取ることとなるため、要撃範囲を拡大させることができる。
Claims (2)
- 目標の位置、速度、種類を表す情報からなる目標情報を取得するステップと、
前記種類を表す情報に基づき、飛しょう体が、前記目標と会合するまでの飛しょう時間を最短とする飛しょう経路、あるいは前記目標に会合する際の残速を最大とする飛しょう経路のいづれの飛しょう経路をとるかを選択するステップと、
選択した前記飛しょう経路に対応し、所定の位置に到達するまでの飛しょう時間と発射直後に前記飛しょう体が向くべき旋回方向とを表にした射表を取得するステップと、
前記目標の位置と速度と前記射表とから、前記目標と前記飛しょう体とが会合する会合点を算出するステップと、
前記会合点に基づき、前記射表から前記旋回方向を抽出するステップと、
発射直後の飛しょう体の旋回方向が抽出した前記旋回方向と一致するように前記飛しょう体を制御するステップと、
を備えることを特徴とする飛しょう体の誘導方法。 - 目標の位置、速度、種類を表す情報からなる目標情報を取得する伝送処理手段と、
飛しょう体が、目標と会合するまでの飛しょう時間を最短とする飛しょう経路をとる場合に、所定の位置に到達するまでの飛しょう時間と発射直後に前記飛しょう体が向くべき旋回方向とを表にした射表、及び、飛しょう体が、目標に会合する際の残速を最大とする飛しょう経路をとる場合に、所定の位置に到達するまでの飛しょう時間と発射直後に前記飛しょう体が向くべき旋回方向とを表にした射表、を記憶する記憶手段と、
前記目標情報に基づきいずれかの前記飛しょう経路を選択し、選択した当該飛しょう経路に対応する前記射表と、前記目標の位置、速度とから前記目標と前記飛しょう体とが会合する会合点を算出し、当該会合点に基づき前記射表から前記旋回方向を抽出し、発射直後の飛しょう体の旋回方向を抽出した前記旋回方向と一致するように制御する演算装置と、
を備えることを特徴とする誘導装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008193592A JP5272560B2 (ja) | 2008-07-28 | 2008-07-28 | 飛しょう体の誘導方法及び誘導装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008193592A JP5272560B2 (ja) | 2008-07-28 | 2008-07-28 | 飛しょう体の誘導方法及び誘導装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010032090A true JP2010032090A (ja) | 2010-02-12 |
| JP5272560B2 JP5272560B2 (ja) | 2013-08-28 |
Family
ID=41736776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008193592A Expired - Fee Related JP5272560B2 (ja) | 2008-07-28 | 2008-07-28 | 飛しょう体の誘導方法及び誘導装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5272560B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012026787A (ja) * | 2010-07-21 | 2012-02-09 | Clarion Co Ltd | カーナビゲーション装置およびカーナビゲーション方法 |
| JP2013181717A (ja) * | 2012-03-02 | 2013-09-12 | Mitsubishi Heavy Ind Ltd | 飛しょう体の制御装置及び飛しょう体の制御方法 |
| JP2016125672A (ja) * | 2014-12-26 | 2016-07-11 | 三菱重工業株式会社 | 飛しょう体誘導装置、飛しょう体誘導方法、飛しょう体、および、プログラム |
| JP2016153706A (ja) * | 2015-02-20 | 2016-08-25 | 三菱重工業株式会社 | 飛しょう体誘導システム、飛しょう体誘導方法及びプログラム |
| JP2020026940A (ja) * | 2018-08-16 | 2020-02-20 | 三菱重工業株式会社 | 誘導装置、飛しょう体及び誘導方法 |
| CN112781449A (zh) * | 2020-12-22 | 2021-05-11 | 北京航天飞腾装备技术有限责任公司 | 一种激光制导武器的作战使用方法及装置 |
| CN114216368A (zh) * | 2021-12-07 | 2022-03-22 | 南京理工大学 | 一种变速条件下弹群协同制导方法及系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60296A (ja) * | 1983-06-15 | 1985-01-05 | 三菱電機株式会社 | 垂直型ミサイル発射機のロ−ル修正方式 |
| JPS6467594A (en) * | 1987-09-08 | 1989-03-14 | Toshiba Corp | Missile guide |
| JPH0415498A (ja) * | 1990-05-09 | 1992-01-20 | Tech Res & Dev Inst Of Japan Def Agency | 飛しょう体の誘導方法 |
| JPH04184099A (ja) * | 1990-11-14 | 1992-07-01 | Mitsubishi Heavy Ind Ltd | 飛しょう経路の設定方法 |
| JPH11211396A (ja) * | 1998-01-28 | 1999-08-06 | Mitsubishi Electric Corp | 飛しょう体の誘導装置 |
| JP2004218869A (ja) * | 2003-01-10 | 2004-08-05 | Mitsubishi Electric Corp | 飛しょう体誘導システム、飛しょう体及び誘導管制装置 |
| JP2005291639A (ja) * | 2004-04-01 | 2005-10-20 | Mitsubishi Electric Corp | 飛しょう体誘導システム |
-
2008
- 2008-07-28 JP JP2008193592A patent/JP5272560B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60296A (ja) * | 1983-06-15 | 1985-01-05 | 三菱電機株式会社 | 垂直型ミサイル発射機のロ−ル修正方式 |
| JPS6467594A (en) * | 1987-09-08 | 1989-03-14 | Toshiba Corp | Missile guide |
| JPH0415498A (ja) * | 1990-05-09 | 1992-01-20 | Tech Res & Dev Inst Of Japan Def Agency | 飛しょう体の誘導方法 |
| JPH04184099A (ja) * | 1990-11-14 | 1992-07-01 | Mitsubishi Heavy Ind Ltd | 飛しょう経路の設定方法 |
| JPH11211396A (ja) * | 1998-01-28 | 1999-08-06 | Mitsubishi Electric Corp | 飛しょう体の誘導装置 |
| JP2004218869A (ja) * | 2003-01-10 | 2004-08-05 | Mitsubishi Electric Corp | 飛しょう体誘導システム、飛しょう体及び誘導管制装置 |
| JP2005291639A (ja) * | 2004-04-01 | 2005-10-20 | Mitsubishi Electric Corp | 飛しょう体誘導システム |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012026787A (ja) * | 2010-07-21 | 2012-02-09 | Clarion Co Ltd | カーナビゲーション装置およびカーナビゲーション方法 |
| JP2013181717A (ja) * | 2012-03-02 | 2013-09-12 | Mitsubishi Heavy Ind Ltd | 飛しょう体の制御装置及び飛しょう体の制御方法 |
| JP2016125672A (ja) * | 2014-12-26 | 2016-07-11 | 三菱重工業株式会社 | 飛しょう体誘導装置、飛しょう体誘導方法、飛しょう体、および、プログラム |
| JP2016153706A (ja) * | 2015-02-20 | 2016-08-25 | 三菱重工業株式会社 | 飛しょう体誘導システム、飛しょう体誘導方法及びプログラム |
| JP2020026940A (ja) * | 2018-08-16 | 2020-02-20 | 三菱重工業株式会社 | 誘導装置、飛しょう体及び誘導方法 |
| JP7063766B2 (ja) | 2018-08-16 | 2022-05-09 | 三菱重工業株式会社 | 誘導装置、飛しょう体及び誘導方法 |
| CN112781449A (zh) * | 2020-12-22 | 2021-05-11 | 北京航天飞腾装备技术有限责任公司 | 一种激光制导武器的作战使用方法及装置 |
| CN114216368A (zh) * | 2021-12-07 | 2022-03-22 | 南京理工大学 | 一种变速条件下弹群协同制导方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5272560B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5272560B2 (ja) | 飛しょう体の誘導方法及び誘導装置 | |
| US8178825B2 (en) | Guided delivery of small munitions from an unmanned aerial vehicle | |
| US20230251070A1 (en) | Interceptor missile and method for steering the interceptor missile | |
| KR101622260B1 (ko) | 충돌시간 제어 유도 방법 및 시스템 | |
| US11631337B2 (en) | Optimal-route generating system | |
| KR102619438B1 (ko) | 오프-축 타겟을 검출하기 위한 유도탄 시스템 | |
| CN113939707A (zh) | 使用基于控制的方法的动态武器到目标分配 | |
| Moreira et al. | Interception of non-cooperative UAVs | |
| KR102228882B1 (ko) | 생체 모방 기법을 활용한 드론 회피 기동 방법 | |
| CN114153226A (zh) | 动态视线信息辅助的无人飞行器视场保持导引方法及系统 | |
| Breivik et al. | Applying missile guidance concepts to motion control of marine craft | |
| JP6389758B2 (ja) | 飛しょう体誘導装置、飛しょう体誘導方法、飛しょう体、および、プログラム | |
| JP7063766B2 (ja) | 誘導装置、飛しょう体及び誘導方法 | |
| JP6727157B2 (ja) | 飛しょう体誘導装置及びそのプログラム | |
| CN117826852A (zh) | 无人机自主攻击的导航控制方法、存储介质、无人机 | |
| JP4407352B2 (ja) | 飛しょう体誘導システム | |
| Imado et al. | Engagement tactics for two missiles against an optimally maneuvering aircraft | |
| JP2013019569A (ja) | 誘導装置および誘導システム | |
| Robb et al. | Earliest intercept line guidance: a novel concept for improving mid-course guidance in area air defence | |
| Karelahti et al. | Adaptive controller for the avoidance of an unknownly guided air combat missile | |
| JP5863515B2 (ja) | 飛しょう体の制御装置及び飛しょう体の制御方法 | |
| JP3566182B2 (ja) | 目標位置の推定装置 | |
| JPH116873A (ja) | 目標観測装置 | |
| JPH0415498A (ja) | 飛しょう体の誘導方法 | |
| JP2006284120A (ja) | 飛しょう体誘導装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110526 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121025 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130429 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |