JP2010024684A - 潜函工法における漏気防止装置 - Google Patents
潜函工法における漏気防止装置 Download PDFInfo
- Publication number
- JP2010024684A JP2010024684A JP2008186023A JP2008186023A JP2010024684A JP 2010024684 A JP2010024684 A JP 2010024684A JP 2008186023 A JP2008186023 A JP 2008186023A JP 2008186023 A JP2008186023 A JP 2008186023A JP 2010024684 A JP2010024684 A JP 2010024684A
- Authority
- JP
- Japan
- Prior art keywords
- water level
- pressure
- air
- leak
- compressed air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Examining Or Testing Airtightness (AREA)
Abstract
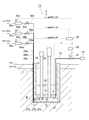
【解決手段】作業室16内に圧縮空気を供給する圧縮空気供給手段(19)と、その圧縮空気供給圧力を調整する圧力調整手段(21,22)と、作業室16の内部にて、刃口14の下端よりも高い位置に開口する漏気検知穴27a,27b,27cと、この漏気検知穴27a,27b,27cから延びて他端が大気に連通する漏気排気通路28a,28b,28cと、この漏気排気通路28a,28b,28cを流れる漏気を検知する漏気検知手段(32a,32b,32c)と、漏気検知手段および圧力調整手段に接続され、漏気検知手段が漏気を検知したか否かの情報を受けて地下水Wの水位を認識し、この地下水位が予め設定された基準水位hに近付くように、圧力調整手段に圧縮空気供給手段の圧縮空気圧力を調整させるよう制御する圧力制御手段(16)とを備える。
【選択図】図1
Description
図5(c)のようにケーソン躯体11の右側では水位が漏気検知穴27a(下限水位h1)を越え、ケーソン躯体11の左側では水位が漏気検知穴27c(上限水位h2)付近に達する。
[発明の実施の形態2]
11 ケーソン躯体
12 外周壁
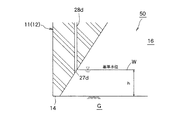
14 刃口
15 作業室スラブ
16 作業室
19 圧縮空気供給手段であるエアコンプレッサー
21 圧力調整手段である圧力調整弁
22 圧力調整手段である圧力指示器
27a,27b,27c 漏気検知穴
28a,28b,28c 漏気排気通路
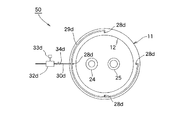
29a,29b,29c グループ連結管
32a,32b,32c 漏気検知手段である漏気検知器
36 圧力制御手段であるコントローラー
37 圧力検知器
h 基準水位
G 地盤
W 地下水
Claims (5)
- ニューマチックケーソン工法における沈下掘削作業時に、作業室内部の地下水位を制御して、刃口からの圧縮空気の漏出を防止する漏気防止装置において、
前記作業室内に前記圧縮空気を供給する圧縮空気供給手段と、
前記圧縮空気供給手段の圧縮空気供給圧力を調整する圧力調整手段と、
前記作業室の内部にて、前記刃口の下端よりも高い位置に開口する少なくとも1つの漏気検知穴と、
一端が前記漏気検知穴に繋がり、他端が大気に連通する漏気排気通路と、
前記漏気排気通路を流れる漏気を検知する漏気検知手段と、
前記漏気検知手段と前記圧力調整手段とに接続され、前記漏気検知手段が漏気を検知したか否かの情報を受けて前記地下水の水位を認識し、この地下水位が予め設定された基準水位に近付くように、前記圧力調整手段に前記圧縮空気供給手段の圧縮空気圧力を調整させるよう制御する圧力制御手段と、
を備えてなることを特徴とする潜函工法における漏気防止装置。 - 前記漏気検知穴を異なる高さで複数設けるとともに、前記漏気排気通路と前記漏気検知手段とを、それぞれ前記漏気検知穴の数量に応じて複数設け、前記複数の漏気検知手段を前記圧力制御手段に接続し、前記圧力制御手段には、前記複数の漏気検知手段がそれぞれ漏気を検出しているか否かにより前記地下水の水位を認識させた上、この水位が、異なる高さで設けられた前記複数の漏気検知穴の間の高さに保たれるように、前記圧力調整手段に前記圧縮空気供給手段の圧縮空気圧力を調整させるよう制御させたことを特徴とする請求項1に記載の潜函工法における漏気防止装置。
- 前記漏気検知穴と前記漏気排気通路とを、前記ケーソン躯体の周方向に沿って複数箇所に配置し、前記刃口の下端から同じ高さにある前記複数の漏気検知穴に繋がる前記漏気排気通路を共通のグループ連結管により連結してグループ化し、これら各々のグループ連結管に前記漏気検知手段を個別に設け、これらの漏気検知手段を前記圧力制御手段に接続したことを特徴とする請求項1又は2に記載の潜函工法における漏気防止装置。
- 前記圧力調整手段により前記圧縮空気供給手段の圧縮空気圧力を調整する際には、微小な圧力を変化させてから前記地下水位を確認し、この水位が目標の範囲にない場合には再度微小な圧力を変化させて前記地下水位を再確認し、これを繰り返すループ制御を行うことを特徴とする請求項1乃至3のいずれかに記載の潜函工法における漏気防止装置。
- 前記漏気検知穴を一種類の高さにのみ設け、この漏気検知穴の高さを前記地下水の基準水位とし、
前記圧力制御手段は、
前記地下水の水位が前記基準水位よりも低い場合に、水位が前記基準水位よりも高くなるように前記作業室の圧力を調整して水位が前記基準水位よりも高くなった時点で前記作業室の圧力を保持する水位上昇制御と、
前記地下水の水位が前記基準水位よりも高い場合に、水位が前記基準水位よりも低くなるように前記作業室の圧力を調整して水位が前記基準水位よりも低くなった時点で前記作業室の圧力を保持する水位下降制御と、
を交互に実行することにより、前記地下水の水位を前記基準水位付近に保つループ制御を行うことを特徴とする請求項1、3、4のいずれかに記載の潜函工法における漏気防止装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186023A JP5038248B2 (ja) | 2008-07-17 | 2008-07-17 | 潜函工法における漏気防止装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186023A JP5038248B2 (ja) | 2008-07-17 | 2008-07-17 | 潜函工法における漏気防止装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010024684A true JP2010024684A (ja) | 2010-02-04 |
| JP5038248B2 JP5038248B2 (ja) | 2012-10-03 |
Family
ID=41730766
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008186023A Active JP5038248B2 (ja) | 2008-07-17 | 2008-07-17 | 潜函工法における漏気防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5038248B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113399060A (zh) * | 2021-07-13 | 2021-09-17 | 株洲长江硬质合金设备有限公司 | 一种湿磨机的自动控制系统及湿磨方法 |
| JP2022088117A (ja) * | 2020-12-02 | 2022-06-14 | オリエンタル白石株式会社 | ケーソンの水面位置推定システム |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6198823A (ja) * | 1984-10-18 | 1986-05-17 | Shiraishi:Kk | ニユ−マチツクケ−ソン工法における刃口部漏気防止方法 |
-
2008
- 2008-07-17 JP JP2008186023A patent/JP5038248B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6198823A (ja) * | 1984-10-18 | 1986-05-17 | Shiraishi:Kk | ニユ−マチツクケ−ソン工法における刃口部漏気防止方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022088117A (ja) * | 2020-12-02 | 2022-06-14 | オリエンタル白石株式会社 | ケーソンの水面位置推定システム |
| CN113399060A (zh) * | 2021-07-13 | 2021-09-17 | 株洲长江硬质合金设备有限公司 | 一种湿磨机的自动控制系统及湿磨方法 |
| CN113399060B (zh) * | 2021-07-13 | 2024-04-12 | 株洲长江硬质合金设备股份有限公司 | 一种湿磨机的自动控制系统及湿磨方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5038248B2 (ja) | 2012-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7987903B1 (en) | Apparatus and method for containing oil from a deep water oil well | |
| JP5132506B2 (ja) | ニューマチックケーソン工法における漏気防止装置および漏気防止方法 | |
| US20090173142A1 (en) | Controlling gas pressure in porosity storage reservoirs | |
| JP6043165B2 (ja) | 地下水位上昇システム、地下水位上昇方法 | |
| KR101672595B1 (ko) | 해수저항 감소 및 수직도 조절을 위한 석션기초, 그 설치방법 및 인양방법 | |
| CN113136887B (zh) | 一种压气干沉井施工工艺 | |
| JP5338064B2 (ja) | 井戸及び井戸内の地下水の酸化を防止する方法、並びに非常用井戸の構築方法及びその方法で構築された非常用井戸 | |
| JP5038248B2 (ja) | 潜函工法における漏気防止装置 | |
| JP2001323477A (ja) | 揚水管理システム | |
| US6712553B1 (en) | Grid drain system | |
| JP5780855B2 (ja) | 地下水揚水装置 | |
| JP2016079676A (ja) | 地下水揚水システムおよびそのシステムを用いた揚水方法 | |
| JP3451382B2 (ja) | 地中水の排出方法および排水装置 | |
| JP5356478B2 (ja) | 場所打ち杭の孔内水位安定化システム | |
| JP3008323B2 (ja) | 複数帯水層の層別揚水装置 | |
| JP4280213B2 (ja) | 大深度真空排水・圧密脱水工法と併用する小井戸の排水工法 | |
| JP4527158B2 (ja) | 潜函工法における漏気回収装置 | |
| CN217203970U (zh) | 深厚覆盖层原位试验井的渗流控制系统 | |
| JP3648663B2 (ja) | 廃棄物処分施設 | |
| JP4679597B2 (ja) | 潜函工法における漏気防止装置 | |
| JP2521032B2 (ja) | 圧気ケ―ソン | |
| CN120505965B (zh) | 深大沉井减阻助沉系统及协同控制方法 | |
| CN217352497U (zh) | 一种基坑止水体系 | |
| JP3896446B2 (ja) | 可搬型鋼管電食装置およびこれを用いた地中鋼管の電食撤去工法 | |
| JP3877816B2 (ja) | ニューマチックケーソンの沈下方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120629 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120703 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120705 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5038248 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |