JP2010023183A - 自走ロボット制御システム - Google Patents
自走ロボット制御システム Download PDFInfo
- Publication number
- JP2010023183A JP2010023183A JP2008187627A JP2008187627A JP2010023183A JP 2010023183 A JP2010023183 A JP 2010023183A JP 2008187627 A JP2008187627 A JP 2008187627A JP 2008187627 A JP2008187627 A JP 2008187627A JP 2010023183 A JP2010023183 A JP 2010023183A
- Authority
- JP
- Japan
- Prior art keywords
- self
- robot
- unit
- station
- propelled robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 16
- 230000033001 locomotion Effects 0.000 claims description 30
- 230000000007 visual effect Effects 0.000 claims description 13
- 238000000926 separation method Methods 0.000 claims 1
- 230000001276 controlling effect Effects 0.000 abstract 1
- 238000005192 partition Methods 0.000 description 26
- 238000001514 detection method Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 14
- 238000012545 processing Methods 0.000 description 11
- 241000282412 Homo Species 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 6
- 230000008054 signal transmission Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images

Landscapes
- Manipulator (AREA)
Abstract
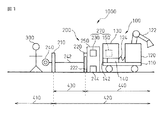
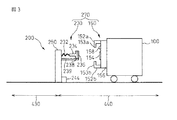
【解決手段】本発明による自走ロボット制御システム1000は、人間の立入りを許容する第一領域430と、人間の立入りを許容しない第二領域440とを有し、自走ロボット100と、自走ロボット100が第一領域430に存在するときに、自走ロボット100の動作を強制制御させる強制制御指令を、自走ロボット100に有線で与えることができる指令装置200と、自走ロボット100が第二領域440から第一領域430へ移動するときに、自走ロボット100と指令装置200との有線接続を自動的に確立し、自走ロボット100が第一領域430から第二領域440へ移動するときに、自走ロボット100と指令装置200との有線接続を自動的に切り離すことができる接続機構270と、を具備することを特徴とする。
【選択図】図1
Description
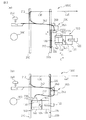
110 走行部
120 作業部
122 アーム
130 ロボット制御部
132 信号処理部
140 バッテリ
142 充電回路
150 ロボット側接続手段(接続機構の一部)
152 ロボット側嵌合部
153 引掛部
154 ロボット側コネクタ(第二コネクタ)
156 駆動部
158 視覚センサ
200 ステーション(指令装置)
210 第一の仕切
212 扉
220 第二の仕切
222 自動扉
224 経路
230 ステーション側接続手段(接続機構の一部)
232 接続ケーブル
234 ステーション側嵌合部
236 ステーション側コネクタ(第一コネクタ)
238 突出部
239 支持体
240 安全スイッチ
242 信号伝達ケーブル
244 ロボット通過検知センサ
250 ステーション制御部
260 給電装置
270 接続機構
300 人間
410 ロボット非動作領域
420 ロボット動作可能領域
430 ロボット動作制限領域
440 ロボット動作非制限領域
1000 安全システム
Claims (8)
- 作業部、走行部並びに該作業部および該走行部を制御する制御部を備える自走ロボットの、該作業部および該走行部の少なくとも一方の動作を強制制御させるための自走ロボット制御システムにおいて、
前記自走ロボットが前記作業部および前記走行部により作業および走行を行う作業領域は、人間の立入りを許容する第一領域と、人間の立入りを許容しない第二領域とを有し、
前記自走ロボットが前記第一領域に存在するときに、前記作業部および前記走行部の少なくとも一方の動作を強制制御させる強制制御指令を、前記自走ロボットに有線で与えることができる指令装置と、
前記自走ロボットが前記第二領域から前記第一領域へ移動するときに、前記自走ロボットと前記指令装置との有線接続を自動的に確立することができると共に、前記自走ロボットが前記第一領域から前記第二領域へ移動するときに、前記自走ロボットと前記指令装置との有線接続を自動的に切り離すことができる接続機構と、
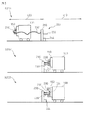
を具備することを特徴とする自走ロボット制御システム。 - 前記接続機構は、前記指令装置が有する第一コネクタと、前記自走ロボットが有する第二コネクタであって該第一コネクタに脱離自在に接続される第二コネクタと、該第一コネクタを前記第二領域の予め定めた位置に支持する支持体とを具備し、前記自走ロボットの前記制御部は、予め教示された走行プログラムに従い前記走行部を制御して、前記自走ロボットの走行動作により、前記第二領域から前記第一領域へ移動する直前に該第二コネクタを該第一コネクタに接続させて前記有線接続を確立させ、前記第一領域から前記第二領域へ移動した直後に該第二コネクタを該第一コネクタから脱離させて前記有線接続を切り離させる、請求項1に記載の自走ロボット制御システム。
- 前記接続機構は、前記第一コネクタおよび前記第二コネクタの少なくとも一方の位置を画像で検出する視覚センサを具備し、前記自走ロボットの前記制御部は、該視覚センサが検出した該位置のデータに基づいて、前記有線接続の確立又は切り離しを実行するように前記走行部を制御する、請求項2に記載の自走ロボット制御システム。
- 前記第二領域から前記第一領域への前記自走ロボットの移動を選択的に許容する障害部をさらに具備し、該障害部は、前記指令装置が前記強制制御指令を出力しているときに、前記第二領域から前記第一領域への前記自走ロボットの移動を許容しない、請求項1から請求項3の何れか一項に記載の自走ロボット制御システム。
- 前記自走ロボットの前記制御部は、前記指令装置の前記強制制御指令に従い、前記作業部および前記走行部の少なくとも一方の動作を強制制御する、請求項1から請求項4の何れか一項に記載の自走ロボット制御システム。
- 前記指令装置の前記強制制御指令は、前記作業部および前記走行部の少なくとも一方の動作を強制停止させる停止指令であり、
前記自走ロボットの前記制御部は、前記指令装置の前記停止指令に従い、前記作業部および前記走行部の少なくとも一方の動作を強制停止する、請求項1から請求項5の何れか一項に記載の自走ロボット制御システム。 - 前記自走ロボットは、前記指令装置の前記停止指令に従い、前記作業部および前記走行部の少なくとも一方への給電を遮断する、請求項6に記載の自走ロボット制御システム。
- 前記自走ロボットは、さらに、バッテリと前記バッテリ用の充電回路と、を備え、
前記指令装置は、さらに、電力を供給する給電装置を備え、
前記充電回路は、前記第一コネクタと前記第二コネクタとが前記有線接続が確立されている場合に、前記給電装置から供給される電力により前記バッテリを充電する、
請求項1から請求項7の何れか一項に記載の自走ロボット制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008187627A JP5192309B2 (ja) | 2008-07-18 | 2008-07-18 | 自走ロボット制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008187627A JP5192309B2 (ja) | 2008-07-18 | 2008-07-18 | 自走ロボット制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010023183A true JP2010023183A (ja) | 2010-02-04 |
| JP5192309B2 JP5192309B2 (ja) | 2013-05-08 |
Family
ID=41729502
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008187627A Expired - Fee Related JP5192309B2 (ja) | 2008-07-18 | 2008-07-18 | 自走ロボット制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5192309B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014054691A (ja) * | 2012-09-12 | 2014-03-27 | Seiko Epson Corp | ロボット、およびロボットシステム |
| CN113561227A (zh) * | 2021-08-06 | 2021-10-29 | 国网河南省电力公司漯河供电公司 | 变电站智能巡视机器人连接装置 |
| US11513530B1 (en) * | 2019-05-08 | 2022-11-29 | Amazon Technologies, Inc. | Techniques for coordinating movement of components within a workspace |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0557669A (ja) * | 1991-09-02 | 1993-03-09 | Hitachi Ltd | 自走ロボツト用の安全装置 |
| JPH1110568A (ja) * | 1997-06-26 | 1999-01-19 | Mitsubishi Electric Corp | 無人搬送装置 |
| JP2000033592A (ja) * | 1998-07-21 | 2000-02-02 | Denso Corp | 生産システム |
| JP2001088080A (ja) * | 1999-09-16 | 2001-04-03 | Denso Corp | 移動ロボットシステム |
| JP2001341086A (ja) * | 2000-05-31 | 2001-12-11 | Denso Corp | 移動ロボットシステム |
| JP2004355195A (ja) * | 2003-05-28 | 2004-12-16 | Yaskawa Electric Corp | ロボット用教示操作装置 |
| JP2008093743A (ja) * | 2006-10-06 | 2008-04-24 | Yaskawa Electric Corp | 自動機械システム |
-
2008
- 2008-07-18 JP JP2008187627A patent/JP5192309B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0557669A (ja) * | 1991-09-02 | 1993-03-09 | Hitachi Ltd | 自走ロボツト用の安全装置 |
| JPH1110568A (ja) * | 1997-06-26 | 1999-01-19 | Mitsubishi Electric Corp | 無人搬送装置 |
| JP2000033592A (ja) * | 1998-07-21 | 2000-02-02 | Denso Corp | 生産システム |
| JP2001088080A (ja) * | 1999-09-16 | 2001-04-03 | Denso Corp | 移動ロボットシステム |
| JP2001341086A (ja) * | 2000-05-31 | 2001-12-11 | Denso Corp | 移動ロボットシステム |
| JP2004355195A (ja) * | 2003-05-28 | 2004-12-16 | Yaskawa Electric Corp | ロボット用教示操作装置 |
| JP2008093743A (ja) * | 2006-10-06 | 2008-04-24 | Yaskawa Electric Corp | 自動機械システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014054691A (ja) * | 2012-09-12 | 2014-03-27 | Seiko Epson Corp | ロボット、およびロボットシステム |
| US11513530B1 (en) * | 2019-05-08 | 2022-11-29 | Amazon Technologies, Inc. | Techniques for coordinating movement of components within a workspace |
| CN113561227A (zh) * | 2021-08-06 | 2021-10-29 | 国网河南省电力公司漯河供电公司 | 变电站智能巡视机器人连接装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5192309B2 (ja) | 2013-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2958740C (en) | Autonomous traveling body | |
| US10471835B2 (en) | Assistance system and method for the positioning of an electric vehicle relative to a charging station, charging station and electric vehicle implementing said method | |
| JP6779164B2 (ja) | 作業車両の自律走行システム | |
| JP6080568B2 (ja) | 監視システム | |
| CN107528370A (zh) | 一种智能安防机器人的自动充电系统及控制方法 | |
| CN103228847A (zh) | 用于在工地控制机器的系统和方法 | |
| JP2018188273A (ja) | エレベーター点検装置 | |
| JP2014011518A (ja) | 無線操作式車両の遠隔操作システム | |
| JP5192309B2 (ja) | 自走ロボット制御システム | |
| JP4940160B2 (ja) | 移動ロボット | |
| JP2000033592A (ja) | 生産システム | |
| JP7402752B2 (ja) | リモコン及び自律走行システム | |
| JP7447670B2 (ja) | 自律移動装置制御システム、その制御方法及びその制御プログラム | |
| KR101583813B1 (ko) | 다목적 스마트 무인 선박 | |
| JP5672609B2 (ja) | 充電制御システム | |
| JP4741940B2 (ja) | 監視システム、同システムを構成する移動ロボットの制御装置 | |
| KR20200054909A (ko) | 이동 로봇의 도난 방지 시스템 | |
| TWI586502B (zh) | 機器人控制系統 | |
| KR20180038871A (ko) | 공항용 로봇 및 그의 동작 방법 | |
| CN212160792U (zh) | 一种移动机器人、门禁设备以及门禁控制系统 | |
| JP6654472B2 (ja) | 電源装置および移動体 | |
| JP5912917B2 (ja) | 無線操作式車両の遠隔操作システムおよび該システムにおける無線操作式車両の復旧方法 | |
| JP6366064B2 (ja) | 電気掃除機 | |
| JP4933364B2 (ja) | 移動体、監視システムおよび制御プログラム | |
| CN109615107B (zh) | 农机找回系统及找回方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5192309 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160208 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |