JP2010020514A - 無人車両の位置方位測定システム - Google Patents
無人車両の位置方位測定システム Download PDFInfo
- Publication number
- JP2010020514A JP2010020514A JP2008179862A JP2008179862A JP2010020514A JP 2010020514 A JP2010020514 A JP 2010020514A JP 2008179862 A JP2008179862 A JP 2008179862A JP 2008179862 A JP2008179862 A JP 2008179862A JP 2010020514 A JP2010020514 A JP 2010020514A
- Authority
- JP
- Japan
- Prior art keywords
- unmanned vehicle
- information
- measurement system
- travel
- orientation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 19
- 230000005540 biological transmission Effects 0.000 claims abstract description 7
- 238000001514 detection method Methods 0.000 abstract description 13
- 238000010586 diagram Methods 0.000 description 6
- 239000003550 marker Substances 0.000 description 5
- 239000000463 material Substances 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 230000032258 transport Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images





Landscapes
- Gyroscopes (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】自らの位置と方位を算出しながら指定された走行ルートに沿った無人車両10の走行を制御するものであって、走行ルート上に複数個が埋設され、各々に固有の識別コード及び埋設された各箇所の位置情報をもった情報発信素子15と、無人車両10の車体の前後それぞれに搭載され、情報発信素子15からの情報を検出する一対の情報受信装置25と、位置方位演算装置21によって走行距離検出器及びジャイロスコープからの検出値によって算出された無人車両10の位置方位を、情報受信装置25によって情報発信素子15からの情報を基に補正データを算出する位置方位補正装置27とを有する無人車両10の位置方位測定システム。
【選択図】 図4
Description
また、本発明に係る無人車両の位置方位測定システムは、走行ルートに沿って埋設された複数の前記情報発信素子が、前記無人車両に搭載された一対の情報受信装置の距離を基準にし、その整数分の1の間隔で配置されたものであることが好ましい。
本実施形態の無人車両10は、例えば図5(a)に示す無人車両であって、製鉄所構内で大型鋼材等の重量物を搬送するものである。従って、昇降装置を有する複数の車輪によって走行し、荷台を上下させることが可能な車両であるが、図1では単純化して示している。
位置方位演算装置21では、ジャイロスコープ24からの回転角の検出情報とロータリエンコーダ22からの走行距離の検出情報とを受け取り、演算処理によって無人車両10の進行方向が求められると共に、走行位置すなわち進行方向における走行距離が求められる。そして、その位置及び方位データが位置方位演算装置21に記憶される。
まず、トランスポンダ受信機25a,25bで得られたトランスポンダ15a,15bのズレ量が、前後それぞれにおいてd1,d2であるとする。そして、この時点における無人車両10の車体中心座標が(N0,E0)であるとする。ここで、トランスポンダ15a,15bを結んだ直線の方向をN軸とし、それに直交する方向をE軸とする。そして、トランスポンダ15a,15bのそれぞれの位置(N1,E1)、(N2,E2)であるとする。また、無人車両10に設置されたトランスポンダ受信機25a,25bの前後方向の距離はaである。
N0=(N1+N2)/2
E0={(E1+d1)+(E2+d2)}/2
θ=tan-1{(d1−d2)/a}
また、トランスポンダ15のIDによって絶対位置が確認できるため、走行ルートの途中からの走行するような場合でも、無人車両10自らの位置および方位を簡便に補正でき、その後の走行を行うことができる。特に、検出した一対のトランスポンダ15のIDの読み取りによって車体前後方向が確認できるため、無人車両10はその車体前後方向を確実に判断し、入力された目的地に向かって進行方向をとり、走行ルートに従った走行を開始することができる。
15 トランスポンダ
21 位置方位演算装置
22 ロータリエンコーダ
23 舵角検出器
24 ジャイロスコープ
25 トランスポンダ受信機
26 データベース
27 位置方位補正装置
28 走行制御装置
Claims (3)
- 走行距離検出器と走行方向を検出するジャイロスコープを搭載して自らの位置と方位を位置方位演算装置によって算出しながら、その位置方位演算装置からの制御信号によって走行制御装置を介して車輪装置を駆動し、それによって無人車両を指定された走行ルートに沿って走行させるための無人車両の位置方位測定システムにおいて、
前記走行ルート上に複数個が埋設され、各々に固有の識別コード及び埋設された各箇所の位置情報をもった情報発信素子と、
前記無人車両の車体の前後に搭載され、前記情報発信素子からの情報を検出する一対の情報受信装置と、
前記無人車両の位置方位について前記情報受信装置を介して取得した前記情報発信素子からの情報を基に補正データを算出する位置方位補正装置と
を有するものであることを特徴とする無人車両の位置方位測定システム。 - 請求項1に記載する無人車両の位置方位測定システムにおいて、
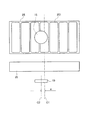
前記情報受信装置は、車体幅方向に複数の受信コイルが設けられたものであり、
前記位置方位補正装置は、前記情報発信素子の対応する位置に従って複数の受信コイルのそれぞれに誘起される電圧の大きさから当該情報受信装置の中心位置から前記情報発信素子の中心位置のズレ量を算出するようにしたものであることを特徴とする無人車両の位置方位測定システム。 - 請求項1又は請求項2に記載する無人車両の位置方位測定システムにおいて、
走行ルートに沿って埋設された複数の前記情報発信素子は、前記無人車両に搭載された一対の情報受信装置の距離を基準にし、その整数分の1の間隔で配置されたものであることを特徴とする無人車両の位置方位測定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008179862A JP4694598B2 (ja) | 2008-07-10 | 2008-07-10 | 無人車両の位置方位測定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008179862A JP4694598B2 (ja) | 2008-07-10 | 2008-07-10 | 無人車両の位置方位測定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010020514A true JP2010020514A (ja) | 2010-01-28 |
| JP4694598B2 JP4694598B2 (ja) | 2011-06-08 |
Family
ID=41705346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008179862A Expired - Fee Related JP4694598B2 (ja) | 2008-07-10 | 2008-07-10 | 無人車両の位置方位測定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4694598B2 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001209429A (ja) * | 2000-01-28 | 2001-08-03 | Nippon Sharyo Seizo Kaisha Ltd | 無人搬送車の位置および方位の補正装置 |
-
2008
- 2008-07-10 JP JP2008179862A patent/JP4694598B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001209429A (ja) * | 2000-01-28 | 2001-08-03 | Nippon Sharyo Seizo Kaisha Ltd | 無人搬送車の位置および方位の補正装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4694598B2 (ja) | 2011-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11808575B2 (en) | Vehicle traveling control method and vehicle control system | |
| US7703396B2 (en) | Carriage system | |
| CN110419067B (zh) | 标识器系统 | |
| US20090128139A1 (en) | Magnet position locator | |
| EP1555186B1 (en) | Carriage system | |
| JP4694599B2 (ja) | 無人車両 | |
| JP3378843B2 (ja) | 無人搬送車の位置および方位の補正装置 | |
| JP4694598B2 (ja) | 無人車両の位置方位測定システム | |
| JP2011118585A (ja) | 自動搬送車 | |
| JP4978157B2 (ja) | 無人搬送車の交差点分岐制御方法およびその装置 | |
| JP5390360B2 (ja) | 自動搬送車 | |
| JP2010204921A (ja) | 無線タグシートおよび移動台車システム | |
| JP6111684B2 (ja) | 無人搬送車 | |
| JP4697262B2 (ja) | 走行車及び走行車システム | |
| JP2013058040A (ja) | 搬送車、搬送車の制御方法及びプログラム | |
| CN109643124B (zh) | 自动行走系统 | |
| JP2022007153A (ja) | 列車位置検知装置 | |
| US11137767B2 (en) | Autonomous travel device and autonomous travel system | |
| JP2001350520A (ja) | 無人搬送車の走行制御装置 | |
| JP5077567B2 (ja) | 無人搬送車の経路の補正システム | |
| JPH08202449A (ja) | 搬送台車の自動運転制御装置 | |
| JP2002108447A (ja) | ジャイロ誘導式無人搬送装置 | |
| CN111352422B (zh) | 基于自学习射频标签的无人车巡线方法、系统和无人车 | |
| JP2983527B1 (ja) | 車両の計測装置 | |
| JP2023082578A (ja) | 自動転舵システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110223 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140304 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4694598 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |