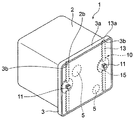
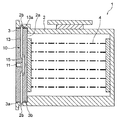
本発明の実施形態を述べるに先立って、本発明の対称となる密閉容器たるポッドのラッチ機構について、図1、2A、2B及び図3を参照して簡単に説明する。尚、図1はポッド1の部分的に透視した領域を含む概略斜視図を、図2A及び2Bはラッチ機構の正面拡大図であって各々ラッチ状態及びラッチ解除状態での位置を示している。また、図3は蓋が固定された状態のポッドの断面の模式図を示している。ポッド1は、大きくは内部にウエハ等収容物4を縦方向に平行にして複数枚収容可能な略箱状の本体2と蓋3とからなる。本体2は一側面に蓋3によって閉鎖可能な開口2aを有する。蓋3は平板形状(凹凸、シール部材、後述するラッチキー等が配置されることから略平板状として定義する。)を有し、その外側面(蓋開閉装置と向かい合う面)には被吸着領域5、及びラッチ機構10の矩形孔3cに連通する受容孔11が配置される。なお、ラッチ機構10は蓋3の平板形状の内部に収容され、該矩形孔3cが所定配置にある際にこれに連通するように受容孔11は配置される。被吸着領域5は、蓋開閉装置側に配置される後述する吸着パッドによって吸着される領域であり、該吸着パッドが容易且つ確実蓋が吸着保持されるように平滑な領域とされている。
ラッチ機構10は蓋3に対して一対配置されており、各々の機構はラッチバー13及び円板15から構成され、これら構成は蓋3の内部に配置される。ラッチバー13は、一方向に延在する板状の部材からなり、一方の端部(先端部)においてラッチ爪13aとして作用する領域を有し、他方の端部(後端部)には延在面に対して垂直に起立する連結ピン13bを有する。ラッチ爪13aは、蓋3の外周面3aに設けられた突き出し孔3bから突き出し可能な幅及び厚さを有する。即ち、ラッチ爪13aは、蓋の略平板形状から突出する構成として把握される。また、ラッチバー13は、個々の突き出し孔3bに対応して配置される。外周面3aの上面及び下面には各々2つの突き出し孔3bが配置され、当該突き出し孔3bは、対辺同士では各々平行且つ向かい合って配置される。ラッチバー13は、各々軸線方向にスライドすることで突き出し可能となるように、対抗する突き出し孔3bに対応する一対が延在方向に整列して配置される。
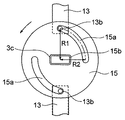
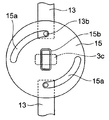
円板15は、延在方向に整列して配置されるラッチバー13の間の中心にその中心が位置するよう配置され、蓋3に対して回動可能に支持される。円板15は、回転中心を中心として対称に配置される溝カム15a、及び中心部を円板と一致させた一方向に長い矩形状キー受容孔15bを有する。該溝カム15aは中心から見て90°の角度範囲の領域に延在し、一方の端部の溝幅の中心と円板中心との距離R1と、他方の端部の溝幅の中心と円板中心との距離R2とが異なるように構成される。前述した連結ピン13bは当該溝カム15aに挿貫される。以上の構成より、キー受容孔15bに後述するラッチキーが挿貫され円板15が回転されると、キー溝15aに沿って連結ピン13bの円板中心からの距離が変化し、当該変化に従ってラッチバー13が延在方向に沿ったスライド動作を行う。ラッチバー13の長さを適当な長さとすることにより、円板15を図2Aに示す状態(ラッチバー13の伸延状態)と図2Bに示す状態(ラッチバーの収縮状態)で、ラッチ爪13aの蓋3a外周面からの突き出し及び収容の状態を各々作ることが可能となる。
なお、ラッチ機構10を蓋3内部に収容するに際して、図2Aに示す状態にあるキー受容孔15bと整列するように蓋3の外側面には矩形孔3cが設けられている。後述するラッチキーはT字形状を有し、拡径部分がキー受容孔15bの奥行きと同等或いはそれ以下の厚さとされている。従って、ラッチキーを矩形孔3cに完全に挿入した状態において、蓋外側面はラッチキー及び円板15の回転に対して何ら障害とならなくなる。以上の構成からなるラッチ機構を動作させることにより、ポッド本体2に設けられた爪受容孔2bに対するラッチ爪13aへの突き出し及び退避の動作を実施することが可能となり、ポッド本体2に対する蓋3の固定或いは取り外しの動作を行うことが可能となる。
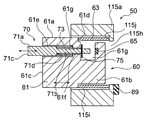
次に、本発明の一実施形態について、以下に図面を参照して説明する。図4は、本発明の一実施形態に係る蓋開閉システムに用いられるセンサの概略構成を模式的に示す図である。図5及び図6は、当該センサの実際の動作を示す図である。図4に示すように、本発明において用いられる段差センサ50は、第一の接触ユニット60及び第二の接触ユニット70を有する。なお、図4に例示する形態において、段差センサ50における第一の接触ユニット60は、後述するFOUPドア115aの表面(ポッドの蓋と正対する側の面)から裏面側に設けられた第一ユニット用収容穴に収容される。当該第一ユニット用収容穴は、同一方向に整列するように連続的に配置された第一ユニット収容穴前方部115iと、第一ユニット収容穴後方部115hと、から構成される。第一ユニット収容穴前方部115iは、ドア115aの表面側に開口して当該表面と垂直に当該開口と同一の開口形状を維持して裏面側に延在する。第一ユニット収容穴後方部115hは、第一ユニット収容穴前方部115iの奥面から更に同一方向に延在し、且つ開口が第一ユニット収容穴前方部115iの開口よりも小さく設定される。
第一の接触ユニット60は、同一方向に整列するように連結して配置される第一ユニット前方部61aと第一ユニット後方部61bとを有するユニット本体61、及び当該ユニット本体61に対して付勢力を付与する第一ユニット用弾性部材63、を有する。第一ユニット前方部61aは、第一ユニット収容穴前方部115iに挿貫可能であり且つ第一ユニット収容穴後方部115hには挿貫不可能な大きさと、第一ユニット収容穴前方部115iの奥行きよりも短い長さを有する。また、第一ユニット後方部61bは、第一ユニット収容穴後方部115hに挿貫可能な大きさと、該第一ユニット収容穴後方部115hに収容されることによって第一の接触ユニット60の軸方向(ユニット前方部と後方部と、及び収容穴前方部と収容穴後方部との整列方向)の動きを画定するガイド機能を確保可能な奥行きと、を有する。第一ユニット前方部61aの前端面61c(ドア115aの表面側面)は平坦面により構成され、第一ユニット後方部61bとの連結部分には、第一ユニット後方部61bの大きさとの差分の段差となる後端面(前述する前端面と平行且つ逆向きの面)61dが形成される。
第一ユニット収容穴前方部115iと第一ユニット収容穴後方部115hとの連結部には、個々の開口の大きさの差に応ずる段差として、ドア115aの表面側に向かう面が突き当て面115jとして形成される。当該突き当て面115jと前述した第一ユニット本体61における後端面61dとは、互いに対向するように配置される。また、前述した第一ユニット用弾性部材63は、これら突き当て面115jと後端面61dとの間に配置される。当該第一ユニット用弾性部材63から受ける付勢力により、無負荷状態にある第一ユニット前方部61aの前端面61c及びその近傍の一部は第一ユニット収容穴前方部115iからはみ出す。即ち、通常状態において、第一ユニット本体61の一部はドア115aの表面から突き出すこととなる。また、第一ユニット用弾性部材63の弾性力は、ドア115aの駆動力よりも小さく設定されている。したがって、例えばポッドの蓋3のような平坦な面に対してドア115aが当接しようとした場合、第一ユニット用弾性部材63は縮められ、第一ユニットの前端面61cがドア115aの表面と同一平面に存在した状態となるまで、第一ユニット本体61が第一ユニット収容穴に収容される。ここで、ドア115a或いは第一ユニット後端面61d近傍の何れかには、第一ユニット本体61が第一ユニット収容穴に完全に収容された状態にあることを検知するために、第一ユニット用センサ69が配置される。当該第一ユニット用センサ69によって第一の当接ユニット60の蓋3等に対する当接状態を知ることが可能となる。
第一ユニット本体61は、第二の接触ユニット70を収容する第二ユニット収容穴を有する。当該第二ユニット用収容穴は、同一方向に整列するように連続的に配置された第二ユニット収容穴前方部61eと、第二ユニット収容穴後方部61fと、から構成される。第二ユニット収容穴前方部61eは、第一ユニット本体61の前端面61cに開口して当該前端面61cと垂直に当該開口と同一の開口形状を維持して裏面方向に延在する。第二ユニット収容穴後方部61fは、第二ユニット収容穴前方部61eの奥面から更に同一方向に延在し、且つ開口が第二ユニット収容穴前方部61eの開口よりも小さく設定される。なお、本形態では第二ユニット収容穴後方部61fの後端は、第一ユニット本体61に配置された空隙部61gと連通している。当該空隙部61gには、後述する第二ユニット後方部71bの当該空隙部61gへの突き出し量を測定するための第二ユニット用センサ65が配置される。また、第一ユニット本体61が第一ユニット用弾性部材63の弾性力によって第一ユニット用収容穴から向け落ちることを防止するために、不図示の抜け止め部材がドア115aと第一ユニット本体61との間に配置される。
第二の接触ユニット70は、同一方向に整列するように連結して配置される第二ユニット前方部71aと第二ユニット後方部71bとを有するユニット本体71、及び当該ユニット本体71に対して付勢力を付与する第二ユニット用弾性部材73、を有する。第二ユニット前方部71aは、第二ユニット収容穴前方部61eに挿貫可能であり且つ第二ユニット収容穴後方部61fには挿貫不可能な大きさと、第二ユニット収容穴前方部61bの奥行きよりも短い長さを有する。また、第二ユニット後方部71bは、第二ユニット収容穴後方部61fに挿貫可能な大きさと、該第二ユニット収容穴後方部61fに収容されることによって第二の接触ユニット70の軸方向(ユニット前方部と後方部と、及び収容穴前方部と収容穴後方部との整列方向)の動きを画定するガイド機能を確保可能な奥行きと、を有する。第二ユニット前方部71aの第二ユニット前端面71c(ドア115aの表面側面)は平坦面により構成され、第二ユニット後方部71bとの連結部分には、第二ユニット後方部71bの大きさとの差分の段差となる第二ユニット後端面(前述する前端面と平行且つ逆向きの面)71dが形成される。
第二ユニット収容穴前方部61eと第二ユニット収容穴後方部61fとの連結部には、個々の開口の大きさの差に応ずる段差として、第一ユニット本体61の前端面61c側に向かう面が第二ユニット用突き当て面61gとして形成される。当該第二ユニット用突き当て面61gと前述した第二ユニット本体71における第二ユニット後端面71dとは、互いに対向するように配置される。また、前述した第二ユニット用弾性部材73は、これら第二ユニット用突き当て面61gと第二ユニット後端面71dとの間に配置される。当該第二ユニット用弾性部材73から受ける付勢力により、無負荷状態にある第二ユニット前方部71aの第二ユニット前端面71c及びその近傍の一部は第二ユニット収容穴前方部61eからはみ出す。即ち、通常状態において、第二ユニット本体71の一部は第一ユニット本体61の表端面61cから突き出すこととなる。なお、第二ユニット用弾性部材73の付勢力により、第二ユニット本体71には常に第二ユニット収容穴から抜けようとする力が加えられる。このため、第二ユニット本体71の抜けを防止するために、第二ユニット後方部71bにおける第二ユニット後端面71dより後方の所定位置には、第二ユニット用係止部材75が配置される。当該第二ユニット用係止部材75は、第二ユニット後方部71bに対して、第二ユニット収容穴後方部61fよりも大きな外形を与えて第二ユニット本体71の第二ユニット用収容穴から外部への抜けを防止すると共に、該第二ユニット本体71の第一ユニット本体61からの突き出し量を規定する。
また、第二ユニット用弾性部材73の弾性力は、第一ユニット用弾性部材63の弾性力よりも小さく設定されている。従って、例えばポッドの平坦な面に対してドア115aが当接しようとした場合、まず、第二ユニット用弾性部材73が縮められ、第二ユニット用弾性部材73が所定量縮んだ後に第一ユニット用弾性部材63が縮められることとなる。即ち、平坦面当接時には、第二ユニット前端面71cが第一ユニットの前端面61cと同一平面に存在した状態となるまで、まず第二ユニット本体が第二ユニット収容穴に収容される。その後、第二の接触ユニット70と共に第一ユニット本体61の後退が開始され、ドア115aの表面と同一平面に存在した状態となるまで、第一ユニット本体61及び第二の接触ユニット70が第一ユニット収容穴に収容される。ここで、前述したように、第一ユニット本体61には第二ユニット用センサ65が配置されている。当該第二ユニット用センサ65は、第二ユニット本体71が第一ユニット収容穴に収容された際の第二ユニット後方部71bの配置を検知する。具体的には、一対の投光素子及び受光素子からなる光センサから該第二ユニット用センサ65を構成し、第二ユニット本体71が第一ユニット収容穴に完全に収容された状態にあるときに当該光センサがこれを検知するように配置これら素子を配置する。また、当該第二ユニット用センサ65は、第二の接触ユニット70の検知動作についての第二の基準位置(該第二の接触ユニット70が第一の接触ユニット60内に最も押し込まれた状態を基準としたときの該基準位置)を提供する。
なお、上述した形態では、第一の接触ユニット60及び第二の接触ユニット70は各々個別に基準位置を設定可能であって、更に各々基準位置に対する変位量に対応する信号を発信可能として述べている。しかしながら、本発明においては、第一の接触ユニット60が蓋3或いはポッド本体2の開口部周囲壁のいずれか一方と当接し、更に第二の接触ユニット70が他方と当接することにより、これら接触ユニット間での相対的な位置関係が変化し、当該変化を把握することで求めようとする段差の有無を知ることも可能である。従って、第一の接触ユニットが対象物との当接によって所定方向に移動可能であり、第二の接触ユニットも他の対象物との当接によって該所定方向に移動可能であり、且つその際の第一の接触ユニットと第二の接触ユニットとの相対的な位置変化に応じた信号を何れかのユニットから発振することが可能であれば良い。即ち、本発明の如く、第二の接触ユニット70を第一の接触ユニット60に対してその位置が変化可能となるように配置し、且つ第一の接触ユニット60自身が基準位置を設定可能であれば、信号の発信は第一の接触ユニット60及び第二の接触ユニット70の何れか一方から為される形態であっても良い。
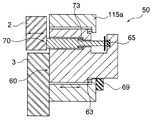
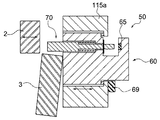
次に当該段差センサ50の実際の動作について、図4と同様の様式にて当該段差センサ50、ポッド1の蓋3、及びポッド本体2における蓋3の周囲壁を示す図5及び6を用いて述べる。尚、図5はポッド本体2に対して蓋3が適正に嵌まり込み固定されている状態を示し、図6はポッド本体2に対して蓋3が正しく固定されずに適正な収容位置から蓋3の一部がはみ出した状態を示している。なお、本実施形態では、段差センサ50はFOUPにおけるドア115aに対して配置されており、第一の接触ユニット60が蓋3(及びポッド本体2)に当接し、且つ第二の接触ユニット70が蓋3の周囲のポッド本体2に当接するように配置されている。ドア115aが蓋3によるポッド本体2の開口を閉鎖する動作を行った後、前述したラッチ機構10によって蓋3のポッド本体2に対する固定が為される。図5はこの状態を示している。
蓋3によるポッド本体2の開口の閉鎖に至る過程では、第二の接触ユニット70に対して何ら当接する対象物が存在せず、当該第二の接触ユニット70は第一の接触ユニットから突き出した状態にある。蓋3を定位置に運ぶことによって、第二の接触ユニット70はポッド本体2の開口周囲壁と当接し、当該周囲壁によって第一の接触ユニット60内に押し込まれる。その際、第二の接触ユニット70の突き出し量、或いは第二のユニット用センサ65の検知基準を適当なものとすることによって、蓋3とポッド本体2との位置関係を知ることが可能となる。より詳細には、第一の接触ユニット60が蓋3の表面と当接することによって当該第一の接触ユニット60と蓋3との位置関係が確定され、続いて第二ユニット用センサ65の検知結果により第一の接触ユニット60と第二の接触ユニット70との位置関係を知ることができる。ここで、第二の接触ユニット70は常にポッド本体2の開口周囲壁と当接した状態にあることから、第一の接触ユニット60を基準として蓋3とポッド本体2の開口周囲壁との位置関係が得られる。
ラッチ機構10によって蓋3がポッド本体2に適切に固定された場合には、ポッド1の後退時に蓋3とポッド本体2はポッド1の動作に追随して相対的な変位を生じない。従って、後退当初、第二の接触ユニット70は第一の接触ユニット60に収容された状態を維持し、第一の接触ユニット60は第一ユニット用弾性部材65の弾性力によってドア115aから突き出し始める。ポッド1の後退に伴って第一の接触ユニット60は突き出し量を増加させ、最大の突き出し量に至った後に蓋3から離れ始める。第一の接触ユニット60が蓋3から離れた後に第二の接触ユニット70の突き出しが始まり、最大の突き出し量に至った後に第二の接触ユニット70はポッド本体2から離れ始める。
これに対し、図6に示すように、蓋3のポッド本体2に対する固定が適切でない場合、第一の接触ユニット60及び第二の接触ユニット70は以下の動作を行うこととなる。即ち、蓋3の固定時に蓋3がポッド本体2の開口に対して適切にはめ込まれない場合には、ドア115aが所定の位置に至ったとしても図6示すように第二の接触ユニット70がポッド本体2の開口周囲壁と適切な当接状態が得られない。この状態は、第二ユニット用センサ65によって検知される。また、仮にはめ込みが適切であっても、蓋3のポッド本体2に対する固定が適切に為されていない場合、例えばポッド1が後退を開始すると蓋3がポッド1に追随しきれずに相対的な変位を生じることとなる。従って、この場合には、上述した第一の接触ユニット60及び第二の接触ユニット70の動作と異なり、第一の接触ユニット60の突き出しより先に第二の接触ユニット70の突き出しが最初に開始される。当該状態も第二ユニット用センサ65によって検知される。
以上述べたような段差センサ50を用いることによって、特許文献3の場合のように蓋3及びポッド本体2各々の位置を算出し更にこれら算出結果から位置関係の適否を求めるような複雑な手順を踏まなくとも、蓋3のはめ込み及び固定状態の適否を知ることが可能となる。なお、上述した実施形態では第二ユニット用センサ65として所謂光学式のオンオフセンサを用いている。しかしながら、第二の接触ユニット70の基準位置に対する伸縮度、或いは所定の後退状態を検知可能であれば、その他の公知のオンオフセンサ、接触センサ等、種々のセンサを使用することが可能である。また、第一ユニット用弾性部材63或いは第二ユニット用弾性部材73としては、例えば第一ユニット後方部61b或いは第二ユニット後方部71bを螺旋状に囲むようなバネが適用できる。しかし、上述したスペースに配置可能であって、第一の接触ユニット60或いは第二の接触ユニット70を所定の弾性力によって突き出させておくことが可能であれば、その他の種々の構成からなる弾性部材の使用が可能である。
また、上述した実施形態では、段差センサ50は、ドア115aに配置することとしている。実際に当該段差センサ50が蓋3に対して容易に当接可能であり且つスペース的に余裕のあるドア115a表面に当該段差センサ50を配置可能であることから、上記実施形態が好適であると認められる。しかし、ドア115は塵等の厳密な管理を要する微小空間内に収容されるため、複雑な機構が付加された場合に当該機構からの発塵等を考慮する必要がある。当該観点に立った場合、段差センサ50を第一の開口部を構成する周囲壁の表面(微小空間の外部側面)に配置することとしても良い。また、上述した実施形態では、第一の接触ユニット60が蓋3の基準位置に対する配置を基本的に検出し、第二の接触ユニット70がポッド本体2の開口周囲壁の基準位置に対する配置を検出することとしている。当該構成の場合、当接面を大きくとることが可能な蓋3側に大きな前端部面を有する第一の接触ユニット60を用いている。また、段差センサ50の設置位置がドア115aの端にある関係上、対象物と当接する前端面を大きくすることが難しい第二の接触ユニット70を、当接面を大きくすることが難しいポッド本体2の開口周囲壁に対応させることとしている。これにより、安定的なユニット−当接面間の接触状態を必要十分な範囲で得ることが可能となり、安定的な段差センサ50の検出結果が得られる。しかし、段差センサ50の配置、ポッド本体2の開口周囲壁における当接面の確保等が困難である場合には、これら個々の接触ユニットの対象を交換しても良い。
なお、上述した段差センサ50は、本発明の最も適当な実施形態の一つであるが、本発明の本質は以下に述べるようにより広範に解釈されるべきである。即ち、上記形態では、第二の接触ユニット70が第一の接触ユニット60に搭載され、第一の接触ユニット60に対しての突き出し状態を得る構成としている。上述した接触センサ50の構成はその一例であるが、より本質的な構成として、蓋或いはポッドの何れか一方に対して付勢力を伴って当接可能であって且つ該一方に対して当接を維持して第一の基準位置に対して相対位置を変化可能な第一の当接ユニットと、蓋或いはポッドの他方に対して付勢力を伴って当接可能であって且つ該他方に対して当接を維持して第二の基準位置に対して相対位置を変化可能な第二の当接ユニットと、を有する、という条件を満たす構成であれば良く、より好適には第二の基準位置が第一の基準位置と一致する、より詳細には第二の基準位置が第一の当接ユニット内に設けられて相対的に第二の基準位置と第一の基準位置とが一致すれば良い。なお、上述した形態においては、第一ユニット用センサ69により得られる信号により定められる第一ユニット本体61の位置が第一の基準位置となり、第二ユニット用センサ65により得られる信号により定められる第二ユニット本体71の位置が第二の基準位置となる。
また、上述したように、両接触ユニットが各々信号を発する様式ではなく、各々の接触ユニット間での相対的な変位を求め、当該変位に応じた信号を発する様式としても良い。この場合、第一ユニット用センサ69を配置せず、第二ユニット用センサ65のみの構成とすることが好適である。当該構成では、第一ユニット本体61の位置に基づいて第一及び第二の基準位置が設定される。この場合、第一の基準位置は第二ユニット用センサ65が取付けられている第一ユニット本体61そのものであり、蓋3との相対的な位置に応じて当該第一の基準位置は変化することとなる。
ここで、本発明においては、前述した第一の基準位置と第二の基準位置とを別個に、即ち、より単純な構成としてこれら基準位置の何れにも対応するベースに対して、これら接触ユニットを独立して配置することとしても良い。この場合、個々の接触ユニットの基準値を一致させるために、両接触ユニットを例えばドア115a或いはドアが閉鎖する第一の開口部の周囲壁の少なくとも何れか一方に配置する必要がある。当該構成とすることによって、両接触ユニットの検知基準を一致させることとなり、蓋とポッド本体との位置関係の検出は特許文献3の構成の場合と比較して格段に容易となる。更に、例えばドア115aに両ユニットを配置する構成の場合、蓋とポッド本体とが適正な位置関係にある蓋開放前の状態での個々の接触ユニットの検知結果をフィードバックさせることによって、蓋の変形等ポッド各々の有する公差の影響を排除することも可能となる。
また、両接触ユニットを各々独立させて配置する場合、これら接触ユニットの接触端面が蓋とポッドの開口周囲壁との間の境界を挟んで隣接するように配置することが好ましい。このように両接触ユニットが境界を挟んで隣接するように配置することによって、蓋の変形、蓋及びポッド本体の製造上の寸法公差の影響が最も小さくなる配置にて、蓋とポッド本体の開口外周壁との位置関係を知ることが可能となる。また、蓋のポッド本体に対しての固定に際して問題となるのは、係合爪と受容穴との係合状態である。従って、両接触ユニットの接触端面の中心を結ぶ線が係合爪の動作軸線と平行であって、且つこれら線と動作軸線との間隔を小さくすることが好ましい。個々の係合爪に対応させてこれら一対の接触ユニットを配置することによって、蓋のポッド本体に対しての固定状態を容易且つ確実に知ることが可能となる。
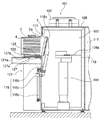
次に、以上述べた段差センサ50を用いた本発明に係るに密閉容器の蓋開閉システムの実施形態について以下に述べる。図7は、概略構成を示す該システムの側断面図であり、図8は、該システム101におけるポッド載置部、ドア、ポッド、及び蓋等を同様の様式にて拡大して示した図である。また、図9はポッドの開口を蓋が閉鎖した状態での、ドアの表面等を見た状態の概略構成を示している。また、図10Aは本形態に係る段差センサ50及びその近傍の構成を図5と同様の様式にて示すものであり、図10Bは同構成を図6と同様の様式にて示すものである。
FIMSシステム101は、微小空間103を構成する筐体105及び筐体105に隣接して配置されるポッド載置部121を有する。筐体105は、更にファン107、ロボット109、第一の開口部111、第二の開口部113、ドアシステム115を有する。ファン107は筐体105によって微小空間103の上部に配置され、筐体105の外部空間に存在する気体を微小空間内部に導入する。筐体105の下部には気流が流出可能となるような構造が配置されており、微小空間103内部で発生する粉塵等は当該気流に運ばれて筐体105の下部から外部空間に排出される。ロボット109におけるロボットアーム109aは、第一の開口部111及び第二の開口部113を介して微小空間の外部に突出可能となっている。第一の開口部111は、筐体105において隔壁として定義される壁に設けられる。また、第一の開口部111は、ドアシステム115におけるドア115aにより一見閉鎖状態とされるが、ドア115aの外周と第一の開口部111の内周面との間には隙間が形成されることから、当該ドア115aは第一の開口部111を略閉鎖可能となっていると述べる。第二の開口部113は、ウエハ処理装置117の内部と接続されているが、当該ウエハ処理装置117の詳細に関しては本発明と直接の関係を有さないために本明細書における説明は省略する。
ポッド載置部121は、ドッキングプレート123、ポッド固定システム125、及びドッキングプレート駆動システム127を有する。ドッキングプレート123の上面は略平面とされており、該上面にはポッド固定システム125の一部が配置される。ポッド1は、ドッキングプレート123の上面に載置され、ポッド固定システム125の当該一部、具体的にはピンがポッド1の下面に配置された不図示の被係合部と係合することによりドッキングプレート123上の所定位置に固定される。なお、ドッキングプレート123は、ポッド1を上面に載置した際に、ポッド1における本体開口2aが前述した第一の開口部111と正対するよう配置されている。ドッキングプレート駆動システム127は、ガイドレール127a及び駆動シリンダ127bを用いて、ドッキングプレート123と共に該所定位置に固定されたポッド1を該第一の開口部111に向かう方向及び離間する方向に駆動する。
駆動用シリンダ127bは載置台本体121aに一端部が固定されており、他端部となる伸縮するシリンダ端部がドッキングプレート123に固定されている。ドッキングプレート123はガイドレール127aに対して摺動可能に支持されており、駆動シリンダ127bのシリンダ端部の伸縮に応じてガイドレール127a上を摺動する。ここで、ドッキングプレート123は、ポッド1を当該ドッキングプレート123上に外部から搭載する(ロードする)或いは取り除く(アンロードする)位置が微小空間103から最も離れた位置に存在することとなり、ポッドの蓋3を取り外す位置が微小空間103に対して最も接近する位置となる。
なお、本実施形態では、段差センサ50は爪13a及び爪受容孔2bが配置される場所に応じて、4個配置される。より詳細には、当該爪13aの動作軸と、第一の接触ユニット60と対応する第二の接触ユニット70との各々の当接面の中心を結ぶ線と、が図9に示す視野(ポッドの進退方向)において一致するように配置される。ドア115aの外部空間側面(ポッド1と対向する面)には、図9に示すように、前述したラッチキー115eが設けられている。当該ラッチキー115eはポッド1の蓋3の表面に設けられた前述したラッチ機構10のキー受容孔15bに挿貫され、円板15を回転することによって、上述したラッチ爪13aをポッド本体2に設けられた爪受容孔2bから退避させ、当該蓋3をポッド本体2に対して着脱することを可能とする。
吸着パッド115kは該蓋3と当接した状態で不図示の配管を通じて負圧供給源108(図11参照)より負圧を供給することにより該蓋3を吸着し、当該蓋3をドア115aによって保持することを可能とする。ドアシステム115は、ドアアーム115b、ドア開閉アクチュエータ115c及びドア上下機構115dを有する。ドアアーム115bは棒状の部材からなり、一端においてドア115aを支持し、他端においてドア開閉アクチュエータ115cと連結されており、中間部の適当な位置において当該位置を中心に回転可能に軸支されている。ドア開閉アクチュエータ115cによって該回転中心を軸としてドアアーム115bは回転し、該ドアアーム115bの一端及びここに支持されるドア115aは第一の開口部111に対して接近或いは離間の動作を行う。ドア上下機構115dは、ドア開閉アクチュエータ115cと前述したドアアーム115bの回転軸とを支持し、上下動用アクチュエータによって上下方向に延在するガイドに沿って当該アクチュエータ及びこれに支持されるドアアーム115b及びドア115aを上下方向に駆動する。また、ラッチキー115eは、ラッチキー駆動機構115f(図11参照)と接続されており、当該駆動機構により所定の角度範囲内での順方向及び逆方向での回転動作を行う。
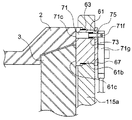
また、本実施形態において段差センサ50は図10A及び10Bに示す形態を有する。なお、同図において、図4、5及び6に示した構成と同様の機能を有する構成については同様の参照符号を用いることとし、その詳細についてはここでの記述を省略する。本段差センサ50における第一ユニット本体61及び第二ユニット本体71は、各々二種類の径からなる二つの円柱を同軸にて接続した形状を有している。第一ユニット用弾性部材63及び第二ユニット用弾性部材73は、何れも所謂バネによって構成される。また、第二ユニット用係止部材75は所謂Eリング或いはCリングより構成され、第二ユニット用センサ65には透過式のフォトマイクロセンサが用いられる。同図中には、第二ユニット本体71に配された、フォトマイクロセンサの検査光を透過するための光透過穴71fが示される。また、第一ユニット本体61が第一ユニット用弾性部材63の弾性力によって第一ユニット用収容穴から向け落ちることを防止するために、平板状の第一ユニット用抜け止め部材67が第一ユニット後方部61bの微小空間側端部に配置される。また第一ユニット用抜け止め部材67には、前述したフォトマイクロセンサのセンサ光投光部71gが配置される。また、同図において第一ユニット用センサ69は不図示とする。
蓋3がポッド本体2の開口に対して適切にはめ込まれ、蓋3が好適にポッド本体2に対して固定されていると看做し得る状態の際には、段差センサ50は図10Aに示す状態となる。同図に示す状態は、図5に示した状態と同様であって、第一の接触ユニット60の前端面61cは蓋3に当接し、当該第一の接触ユニット60は第一ユニット用センサ69に規定される第一の基準位置に位置する。また、第二の接触ユニット70の前端面71cはポッド本体2の開口外周面に当接し、当該第二の接触ユニット70は第二ユニット用センサ65(71f、71g)によって規定される第二の基準位置に位置する。即ち、第一の接触ユニット60と第二の接触ユニット70とが共に各々の基準位置に存在し、蓋3とポッド本体2とが適切な位置関係を保っていることが確認される。
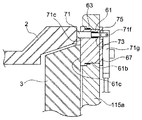
図10Aに示す状態から、例えばドア115aによる蓋3の保持を解除せずにポッド1の停止位置を若干後退させる。その際、蓋3の係合爪13aがポッド本体2の爪受容穴2bに適切に嵌まり込んでいない場合には、蓋3はドア115aと共にポッド本体2に対して相対移動してポッド本体2の開口周囲壁に対して段差を生じさせる。この状態が図10Bに示される。この場合、第一ユニット用センサ69は第一の接触ユニット60が第一の基準位置に存在するという信号を発生するが、第二ユニット用センサ65(71f、71g)は第二の接触ユニット70が第二の基準位置に存在しないという信号発生させる。従って、ドア115aによる蓋3のポッド本体2に対する取付け操作を再度やり直すこととなる。
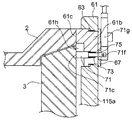
なお、前述したように段差センサ50の配置、ポッド本体2の開口周囲壁における当接面の確保等が困難である場合には、これら個々の当接ユニットの対象を交換しても良い。このように段差センサ50における第一の接触ユニット60及び第二の接触ユニット70の接触対象を前述した図10A及び図10Bの実施形態と入れ替えた場合の実施形態を図11A及び図11Bに示す。なお、これら図面は図10A及び10Bと同様の様式にて各構成を示したものであって、同一の構成については同一の参照符号を用いることとし、その詳細な説明はここでは省略し、構成上の相違点についてのみ述べる。従って、同図においても、第一ユニット用センサ69は不図示とする。本段差センサ50では、第一ユニット本体61はポッド本体2の開口周囲壁に対応する接触子として機能し、第二ユニット本体71は蓋3に対応する接触子として機能する。ここで、当該段差センサ50が検知する段差においては、常に蓋3がポッド本体2の開口周囲壁より突き出した状態を検知することを要する。このため、本実施形態では、第一の接触ユニット60に対して、蓋3がポッド本体2の開口周囲壁より突き出す際にこれを妨げないように、切欠部61hを有する。
蓋3がポッド本体2の開口に対して適切にはめ込まれ、蓋3が好適にポッド本体2に対して固定されていると看做し得る状態の際には、段差センサ50は図11Aに示す状態となる。同図に示す状態は、図10に示した状態と同様であって、第一の当接ユニット60の前端面61cはポッド本体3の開口周囲壁に当接し、当該第一の接触ユニット60は第一ユニット用センサ69に規定される第一の基準位置に位置する。また、第二の当接ユニット70の前端面71cは蓋3に当接し、当該第一の接触ユニット70は第二ユニット用センサ65(71f、71g)によって規定される第二の基準位置に位置する。即ち、第一の接触ユニット60と第二の接触ユニット70とが共に各々の基準位置に存在し、蓋3とポッド本体2とが適切な位置関係を保っていることが確認される。
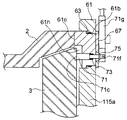
図11Aに示す状態から、例えばドア115aによる蓋3の保持を解除せずにポッド1を若干後退させる。その際、蓋3の係合爪13aがポッド本体2の爪受容穴2bに適切に嵌まり込んでいない場合には、蓋3はドア115aと共にポッド本体2aに対して相対的に移動してポッド本体2の開口周囲壁に対して段差を生じさせる。この状態が図11Bに示される。この場合、第一ユニット用センサ69は第一の接触ユニット60が第一の基準位置に存在するという信号を発生するが、第二ユニット用センサ65(71f、71g)は第二の接触ユニット70が第二の基準位置に存在しないという信号を発生させる。従って、ドア115aによる蓋3のポッド本体2に対する取付け操作を再度やり直すこととなる。なお、上述したように、当該形態は個々の接触ユニットにおける当接面である前端面が小さくなる。しかし、当接面が小さくなることから個々のユニットにおいて用いる弾性部材の弾性定数が小さくとも段差を確実に検知することが可能となり、応答性の良い段差センサを構築できる可能性がある。
図12に当該FIMSシステム101の構成をブロック図として示す。上述したファン107、ロボット109、ドアシステム115、ポッド固定システム125、及びドッキングプレート駆動システム127は、制御装置102によって各々制御される。ドアシステム115は、ラッチ機構駆動115f、ドア開閉用アクチュエータ115c、及びドア上下機構115dを各々独立して制御可能であるが、実際上はこれら各々の構成が一連のタイムチャートに応じて動作するようにこれら構成を制御する。なお、吸着パッド115kに対する負圧供給源108からの負圧の供給及び供給停止(負圧の破壊)の動作は、制御装置102によって行われる。ドッキングプレート駆動システム127は、駆動シリンダ127bの駆動のオンオフを行うが、当該駆動シリンダ127の動作によってドッキングプレート123が確実に所定の二位置、即ちポッド1のロード位置に存在する場合とポッド1がウエハ挿脱可能な位置であるドック位置に存在する場合とを検知する必要がある。
このため、ポッド1がドッキングプレート123上の載置されたこと、及びドッキングプレート123に対してポッド1をロード・アンロードすべき位置に該ドッキングプレート123が存在することを検知するロードセンサ127dが、ドッキングプレート駆動システム127に接続されている。また、ドッキングプレート123が上述したドック位置に存在するか否かを検知するドックセンサ127cも該ドッキングプレート駆動システム127に接続されている。また、本発明においては、これら通常のセンサ群に加え、上述した段差センサ50を構成する第一ユニット用センサ69及び第二ユニット用センサ65(71f、71g)が配置される。制御装置102は、段差センサ50より得られた信号に基づいてポッド2に対する蓋3の取付け状態を判定する判定手段として機能も有する。
本実施形態においては、段差センサ50によってポッド本体2と蓋3との位置関係の適否を求め、これによってラッチ爪13aの爪受容孔2bに対する適正状態での挿貫の有無を想定検知し、その検知結果に基づいて蓋3のポッド本体2への固定状態の適否を判断している。通常は、検知結果が適切であるとして得られた場合には、通常のポッド1のアンロード動作が実施される。また、検知結果が不適切である、即ち蓋3のポッド本体2に対する固定状態が得られておらず、搬送等において蓋3が外れる可能性があると認められる場合には、一端蓋3をポッド本体2より取り外し、再度蓋3の固定操作と蓋3とポッド本体2の開口周囲壁との段差を求め、固定状態の検知を再度行うこととしている。
ここで、実際にウエハ処理作業を行う際の当該FIMSシステム101の動作について説明する。ウエハ処理作業において、所定枚数のウエハを収容し内部が清浄気体によって満たされたポッド1がドッキングプレート123上に載置される。ドッキングプレート123を載置する際に、ポッド固定システム125が動作してドッキングプレート123に対するポッド1の載置位置を所定のものとする。続いてドッキングプレート駆動システム127が動作し、ポッド1を第一の開口部111に向けて駆動する。具体的には、ポッド固定システム125によってドッキングプレート123と一体化されたポッド1を、ドッキングプレート123を介する様式にて駆動シリンダ127bが移動させる。その際、ドア115aは第一の開口部111を略閉鎖する位置で停止している。当該駆動動作は、ポッド1の蓋3がドア115aの当接面と当接し、ドッキングプレート123と第一の開口部111と所定の位置関係となった段階にて終了する。この時、ラッチキー駆動機構115fにおけるラッチキー115eが蓋3表面の露出するキー受容孔15bに挿貫され円板15を回転することによって蓋3をポッド本体2に対して着脱可能な状態とすると同時に、吸着パッド115kが蓋3を吸着し、蓋3がドア115aによって保持された状態となる。
当該状態からドア開閉アクチュエータ115cが動作を開始し、ドアアーム115bが回動して蓋3を保持するドア115aを第一の開口部111から微小空間103の内部方向に運ぶ。ドアアーム115bが所定角度で回動を停止した後、ドア上下機構115dが動作を開始し、ドア開閉アクチュエータ115cと共にドア115aを下方に移動させる。当該動作によって第一の開口部111は全開状態となり、微小空間103は第一の開口部111を介してポッド本体2の内部と連通した状態となる。この状態においてロボット109が動作を開始し、ロボットアーム109aによってウエハ4をポッド1の内部から第二の開口部113を介してウエハ処理装置117に搬送する。また、この状態を維持して、当該ロボット109は、更にウエハ処理装置117内部において所定の処理が施されたウエハをポッド1内部へも搬送する。蓋3をポッド1に取り付け、ポッド1をFIMSシステム101より取り外し可能とする場合には、基本的にはこれら動作が逆に行われるが、本発明においては、前述のように蓋3をポッド1に取付けた後に、段差センサ50によりポッド本体2と蓋3との係合状態の適否を得た後に、ポッド1が移動されることとなる。
以上に述べた構成からなるロードポート装置101において、本発明を実施した上で、更に蓋に対して直接的に負荷を加える操作を追加して、当該蓋の固定状態を更に確度良く得る方法について以下に詳述する。通常ポッド1をFIMSシステム101からアンロードする(ポッドを取り外し可能な状態とする。)場合には、上述したようにロード(ポッドを載置台に装着する。)時とは逆の手順で各々の構成を動作させる。しかしながら、従来構成ではポッド本体2に対して蓋3が確実に固定されているか否かを知ることは困難である。また、本発明を実施した場合であっても、上述したように例えばドア115aの押圧によって、一時的にポッド本体2と蓋3との位置関係が好適な状態にあるという検知結果が得られるが、爪等による固定は不十分である場合も存在し得る。
本実施形態においては、各構成の動作を以下の順序とすることによって、上述した段差センサ50を用いて、蓋3のポッド本体2に対する固定状態の適否を判別することとしている。当該方法を組み合わせることにより、ポッド本体2に対する蓋3の固定状態をより確実に把握することが可能となる。以下、制御装置102によって為される当該動作を、図13のフローチャートに示す。具体的には、ドアシステム115を動作させ、ドック位置に停止中のポッド本体2の開口2aに対して蓋3を取付ける(S1)。開口2aに対して蓋3がおおむね所定の配置に至ったと判断された時点で、ラッチキー115eを動作させ、蓋3に配置されるラッチ爪13aを突き出させてこれをポッド本体2側の爪受容孔2b内部に挿入させる。当該ラッチ爪13aが爪受容孔2bの内壁等と係合することによって、蓋3はポッド本体2に固定される(S2)。
通常は、当該ラッチ爪13aの突き出し操作が終了すると共に、吸着パッド115kによる蓋3の保持を解除し、ドッキングプレート123の後退が始められる。本実施形態では、当該操作と異なり、突き出し操作が終了した段階においても吸着パッド115kによる蓋3の保持を維持し、当該状態のままで、ドッキングプレート23の後退動作(或いはドア115aの若干の後退動作)を一時的に実施する(S3)。後退動作によって、本来であれば、ポッド1或いはドッキングプレート123のドック位置からの変位により、第一ユニット用センサ69より第一の接触ユニット60が基準位置から動いたとの信号が得られる。その際、第二の接触ユニット70は第一の接触ユニット60に追随して移動するために、第二ユニット用センサ65からは第二の接触ユニット70の移動を示す信号は発信されない。なお、ここで、吸着パッド115kによる蓋3の保持力は、駆動シリンダ127bによるドッキングプレート123等を移動させる駆動力よりも小さくなるように設定されている。
これに対し、蓋3のポッド本体2に対する固定が不完全な場合、具体的にはラッチ爪13aが爪収容孔2bに適切に挿入されていない場合には、当該蓋3はポッド本体2との再分離が可能である。従って、蓋3はドア115aとの一体状態を解除せず、第一ユニット用センサ69は第一の接触ユニット60が第一の基準位置に存在するという信号を発生し、第二ユニット用センサ65は第二の接触ユニット70が第二の基準位置に存在しないという信号発生させる。上述したような、フローチャートにおいてはS4の操作であって、段差センサ50により所定の検知結果が得られているか否かにより、蓋3のポッド本体2に対しての変位の有無が確認される。また、その際、ドックセンサ127cからの信号であって、ポッド本体2が後退したことを同時に確認することにより、ポッド本体2と蓋3とが異なった動作を為していることを確実に知ることができる。
より具体的には、駆動シリンダ127bの動作開始から、制御装置102が有するタイマ102aにおいて規定された所定時間が経過する間に、段差センサ50から所定の検知結果が得られた場合であって、且つドックセンサ127cによるポッド本体2の移動が確認された時、蓋3はポッド本体2に適切に固定されていると判断される。従って、フローはS5に進み、当該状態から一旦駆動シリンダ127bからドッキングプレート123に加えられる駆動力を解除し、その後吸着パッド115kによる蓋3の保持の解除(S6)等、通常のポッド1のアンロードの際の操作を実施することとなる。一方、所定時間が経過しても、段差センサ50から所定の検知結果を得たとの信号が得られない場合には、蓋3のポッド本体2に対する固定が不完全であると判断される。この場合には、駆動シリンダ127bを逆に動作させてドッキングプレート123等を再度ドック位置に帰還させる(S7)。その後、再度S1からの操作を行い、蓋3がポッド本体2に対して適切に固定されていることが確認されるまで当該操作が繰り返されることとなる。或いは、蓋3の固定状態が不良であるとして、制御装置102がアラーム信号を出力し、作業者への通知が行われる。
以上に述べた実施形態に係るポッドの蓋閉鎖方法を、上述したポッド及びロードポートにおいて実施することによって、ポッドに対して蓋か好適に固定されているか否かを簡便且つ更に確実に知ることが可能となる。また、従来装置において得られる段差センサ50からの信号を判定するステップ、当該判定結果に応じて再度蓋の固定操作を行うループ、及び駆動シリンダからの荷重を一旦解除するステップを、従来装置における動作フローに付加することだけでも、本実施形態に係る方法の実施が可能となるという効果も得られる。
なお、上述した実施形態においては、ドッキングプレート123等の変位を検知する変位検知手段として、ドックセンサ127cを用いることとしている。しかしながら、ポッドの形状、例えば開口面が突き出す形状の場合には、前述したドックセンサ127cでは、配置上適切に変位を検地できない場合も考えられる。この場合、前述したドックセンサの信号のみならず、ドッキングプレートがある程度ドック位置から移動したことを検知するために配置される不図示の所謂アンドックセンサから信号を併用して用いることとしても良い。ドックセンサ及びアンドックセンサからの二つの位置信号を用いることによって、用いるポッドに応じて特定区間の変位によりポッド本体2の移動の有無を判定することが可能となる。従って、このような構成であっても、上述の方法の実施によってポッドの形状に依存することなく、蓋とポッドとの固定状態を知ることが可能となる。
なお、上記実施形態においては、蓋保持手段として吸着パッド115kを用いることとしているが、当該様式のみならず所謂ラッチによる保持等、種々の構成を用いることが可能である。なお、他の構成を用いる場合には、前述した駆動シリンダ127bから供給される駆動力との間において、蓋の固定状態を判定する際の操作において、駆動力>保持力の関係を満たすようにドッキングプレート駆動手段及び蓋保持手段の構成を選択することが好ましい。しかし、駆動力<保持力であったとしても、この場合、ドックセンサの信号から蓋固定状態の適否を判定することは可能である。具体的には、ドッキングプレート駆動力が付加されているにも拘わらず、ドックセンサから当該プレートの移動を示す信号が出されなければ、蓋3は好適にポッド本体2に固定されていると判断できる。これに対し、駆動力の付加により当該プレートが移動した場合には、蓋はポッド本体に固定されていないと判断できる。即ち、上記実施形態においては、吸着パッド115kによる蓋3の保持力が駆動シリンダ127bによるドッキングプレート123等を駆動させる駆動力よりも小さく設定される例を示しているが、これを大きく設定しても良い。その場合、ラッチ爪13aが爪受容孔2bに適切に挿入されておらず蓋3とポッド本体2とが再分離可能である時には、段差センサ50によって蓋3とポッド本体2との分離が検知される。
以上述べた実施形態では、段差センサはFIMSシステムに固定された構成として述べている。しかしながら、当該構成を所謂ユニット化し、従来から存在するFIMSシステム等に対して該ユニットを各々付加することも可能である。これにより、本発明の課題に対して何ら対応を為していなかった従来のFIMSシステムに対しても本発明において確立された段差センサを簡易且つ廉価で用いることが可能となる。更に、本発明はウエハを対象とするFIMSシステムに関して主として述べている。しかしながら、本発明の適用対象は該システムに限定されず、例えばディスプレイ用のパネル、光ディスク等を収容する密閉容器等に対しても適用可能である。
1:ポッド、 2:ポッド本体、 3:蓋、 4:ウエハ、 5:被吸着領域、10:ラッチ機構、 11:受容孔、 13:ラッチバー、 15:円板、 50:段差センサ、 60:第一の接触ユニット、 61、第一ユニット本体、 63:第一ユニット用弾性部材、 65:第二ユニット用センサ、 67:第一ユニット用抜け止め部材、 69:第一ユニット用センサ、 70:第二の接触ユニット、 71:第二ユニット本体、 73:第二ユニット用弾性部材、 75: 第二部材用係止部材、 101:ロードポート装置、 102:制御装置、 103:微小空間、 105:筐体、 107:ファン、 108:負圧供給源 109:ロボット、 111:第一の開口部、 113:第二の開口部、 115:ドアシステム、 117:ウエハ処理装置、 121:ポッド載置部、 123:ドッキングプレート、 125:ポッド固定システム、 127:ドッキングプレート駆動システム