JP2009189152A - 電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 - Google Patents
電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 Download PDFInfo
- Publication number
- JP2009189152A JP2009189152A JP2008026561A JP2008026561A JP2009189152A JP 2009189152 A JP2009189152 A JP 2009189152A JP 2008026561 A JP2008026561 A JP 2008026561A JP 2008026561 A JP2008026561 A JP 2008026561A JP 2009189152 A JP2009189152 A JP 2009189152A
- Authority
- JP
- Japan
- Prior art keywords
- power storage
- storage device
- voltage
- power
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims description 27
- 230000007423 decrease Effects 0.000 claims description 35
- 238000007599 discharging Methods 0.000 claims description 7
- 238000004364 calculation method Methods 0.000 abstract description 36
- 238000010586 diagram Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 9
- 239000003990 capacitor Substances 0.000 description 8
- 101150086935 MRN1 gene Proteins 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000009499 grossing Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000011217 control strategy Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 101100257262 Caenorhabditis elegans soc-1 gene Proteins 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 244000145845 chattering Species 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 238000009789 rate limiting process Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 101150114085 soc-2 gene Proteins 0.000 description 1
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Dc-Dc Converters (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】複数の蓄電装置を含む電源システムにおいて蓄電装置の電圧変動を抑制する。
【解決手段】コンバータECU2は、目標算出部60と、電圧制御部72−1と、電流制御部72−2と、補正部64とを含む。電圧制御部72−1は、電圧Vhが目標電圧VRとなるように第1コンバータを制御する。電流制御部72−2は、電流Ib2が目標量となるように第2コンバータを制御する。補正部64は、第1および第2の蓄電装置の電圧Vb1,Vb2に基づいて、第2の蓄電装置の目標電流IR2を補正する。
【選択図】図3
【解決手段】コンバータECU2は、目標算出部60と、電圧制御部72−1と、電流制御部72−2と、補正部64とを含む。電圧制御部72−1は、電圧Vhが目標電圧VRとなるように第1コンバータを制御する。電流制御部72−2は、電流Ib2が目標量となるように第2コンバータを制御する。補正部64は、第1および第2の蓄電装置の電圧Vb1,Vb2に基づいて、第2の蓄電装置の目標電流IR2を補正する。
【選択図】図3
Description
この発明は、充放電可能な複数の蓄電装置を備えた電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体に関する。
昨今、ハイブリッド自動車(Hybrid Vehicle)や電気自動車(Electric Vehicle)など動力源として電動機を搭載する電動車両が注目されている。これらの電動車両においては、加速性能や走行持続距離などの走行性能を高めるために、電源システムの大容量化が進められている。そして、電源システムを大容量化するための手法として、複数の蓄電装置と複数のコンバータとを有する構成が提案されている。
たとえば、ディ・ナポリらの「ハイブリッド車両推進システムに向けられた多入力DC−DCパワーコンバータのための制御ストラテジー」には、複数の蓄電装置としてキャパシタおよびバッテリを備え、キャパシタおよびバッテリの各々に対応するDC−DCコンバータを備えた電源システムの構成が開示されている。そして、このディ・ナポリらでは、キャパシタに対応するコンバータを電流制御(電力制御)し、バッテリに対応するコンバータを電圧制御することが開示されている(非特許文献1参照)。
特開2007−221894号公報
ディ・ナポリ(Di Napoli, A)他3名、「ハイブリッド車両推進システムに向けられた多入力DC−DCパワーコンバータのための制御ストラテジー(Control strategy for multiple input DC-DC power converters devoted to hybrid vehicle propulsion systems)」,(米国),2002年産業エレクトロニクス・ISIE2002・2002年米国電気電子学会国際シンポジウム会報(Industrial Electronics, 2002. ISIE 2002. Proceedings of the 2002 IEEE International Symposium on),2002年5月26日−29日,第3巻,p.1036−1041
ディ・ナポリ(Di Napoli, A)他4名、「ハイブリッド車両におけるパワーフローマネジメントのための多入力DC−DCパワーコンバータ(Multiple-Input DC-DC Power Converter for Power-Flow Management in Hybrid Vehicles)」,(米国),2002年産業応用会議・第37回IAS年次集会・2002年米国電気電子学会会議録(Industry Applications Conference, 2002. 37th IAS Annual Meeting. Conference Record of the 2002 IEEE),2002年,第3巻,p.1578−1585
電動車両において、駆動輪がスリップすると、駆動輪の回転数が急増することにより電動機の出力が一時的に急増する。このため、電源システムから電動機へ大電力が出力される。反対に、駆動輪がスリップ状態からグリップすると、駆動輪の回転数が急減することにより電動機の出力が一時的に急減する。ここで、電動車両がハイブリッド車両であって、エンジンを用いた発電が行なわれている場合には、その発電電力が電動機で消費されなくなることにより、負荷側から電源システムへ大電力が供給される。
このように、駆動輪のスリップやスリップ状態からのグリップが発生すると、電源システムの入出力が急変し、蓄電装置の過電圧や低電圧が発生し得る。ここで、上記のディ・ナポリらに開示された電源システムのように、DCリンクに並列接続された複数のコンバータの一方が電圧制御され他方を電流制御(電力制御)されている場合、蓄電装置の入出力電流(電力)を制御していない電圧制御側のコンバータに対応する蓄電装置(ディ・ナポリらにおいてはバッテリ)において、特に大きな電圧変動が発生し得る。
そこで、この発明は、かかる問題点を解決するためになされたものであり、その目的は、複数の蓄電装置を含む電源システムにおいて蓄電装置の電圧変動を抑制可能な電源システムおよび電動車両を提供することである。
また、この発明の別の目的は、複数の蓄電装置を含む電源システムにおいて蓄電装置の電圧変動を抑制可能な電源システムの制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体を提供することである。
この発明によれば、電源システムは、負荷装置と電力を授受可能な電源システムであって、充放電可能な第1および第2の蓄電装置と、電力線と、第1および第2のコンバータと、制御装置とを備える。電力線は、当該電源システムと負荷装置との間で電力を授受可能に構成される。第1のコンバータは、第1の蓄電装置と電力線との間に設けられる。第2のコンバータは、第2の蓄電装置と電力線との間に設けられる。制御装置は、第1および第2のコンバータを制御する。制御装置は、第1および第2の制御部と、補正部とを含む。第1の制御部は、電力線の電圧が目標電圧となるように第1のコンバータを制御する。第2の制御部は、第2の蓄電装置の充放電が目標量となるように第2のコンバータを制御する。補正部は、第1および第2の蓄電装置についての電圧および充電状態の少なくとも一方に基づいて、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、第2の制御部は、フィードバック補償部と、フィードフォワード補償部と、切替部とを含む。フィードバック補償部は、目標量と第2の蓄電装置の充放電量との偏差に基づいてフィードバック補償量を算出する。フィードフォワード補償部は、第2の蓄電装置の電圧と電力線の電圧とに基づいてフィードフォワード補償量を算出する。切替部は、電力線の電圧実績と目標電圧との偏差が規定の範囲内のとき、フィードフォワード補償部において電力線の電圧として目標電圧を用い、偏差が規定の範囲を外れたとき、フィードフォワード補償部において電力線の電圧として電圧実績を用いる。
好ましくは、補正部は、第1の蓄電装置の電圧が規定の第1のしきい値よりも低いとき、第2の蓄電装置の放電量が増加し、または第2の蓄電装置の充電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第1の蓄電装置の電圧が規定の第2のしきい値よりも高いとき、第2の蓄電装置の充電量が増加し、または第2の蓄電装置の放電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第2の蓄電装置の電圧が規定の第3のしきい値よりも低いとき、第2の蓄電装置の充電量が増加し、または第2の蓄電装置の放電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第2の蓄電装置の電圧が規定の第4のしきい値よりも高いとき、第2の蓄電装置の放電量が増加し、または第2の蓄電装置の充電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
また、好ましくは、補正部は、第1の蓄電装置の充電状態を示す状態量が規定の第1のしきい値よりも少ないとき、第2の蓄電装置の放電量が増加し、または第2の蓄電装置の充電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第1の蓄電装置の充電状態を示す状態量が規定の第2のしきい値よりも多いとき、第2の蓄電装置の充電量が増加し、または第2の蓄電装置の放電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第2の蓄電装置の充電状態を示す状態量が規定の第3のしきい値よりも少ないとき、第2の蓄電装置の充電量が増加し、または第2の蓄電装置の放電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
好ましくは、補正部は、第2の蓄電装置の充電状態を示す状態量が規定の第4のしきい値よりも多いとき、第2の蓄電装置の放電量が増加し、または第2の蓄電装置の充電量が減少するように、第2の蓄電装置の充放電の目標量を補正する。
また、この発明によれば、電動車両は、上述したいずれかに記載の電源システムと、電源システムと電力を授受可能な駆動装置と、駆動装置によって駆動される電動機と、電動機によって駆動される車輪とを備える。
また、この発明によれば、制御方法は、負荷装置と電力を授受可能な電源システムの制御方法である。電源システムは、充放電可能な第1および第2の蓄電装置と、電力線と、第1および第2のコンバータとを備える。電力線は、当該電源システムと負荷装置との間で電力を授受可能に構成される。第1のコンバータは、第1の蓄電装置と電力線との間に設けられる。第2のコンバータは、第2の蓄電装置と電力線との間に設けられる。そして、制御方法は、電力線の電圧が目標電圧となるように第1のコンバータを制御するステップと、第2の蓄電装置の充放電が目標量となるように第2のコンバータを制御するステップと、第1および第2の蓄電装置についての電圧および充電状態の少なくとも一方に基づいて第2の蓄電装置の充放電の目標量を補正するステップとを含む。
好ましくは、第2のコンバータを制御するステップは、目標量と第2の蓄電装置の充放電量との偏差に基づいてフィードバック補償量を算出するサブステップと、電力線の電圧実績と目標電圧との偏差が規定の範囲内か否かを判定するサブステップと、偏差が規定の範囲内であると判定されると、第2の蓄電装置の電圧と目標電圧とに基づいてフィードフォワード補償量を算出するサブステップと、偏差が規定の範囲外であると判定されると、第2の蓄電装置の電圧と電力線の電圧実績とに基づいてフィードフォワード補償量を算出するサブステップとを含む。
また、この発明によれば、記録媒体は、コンピュータ読取可能な記録媒体であって、上述した制御方法をコンピュータに実行させるためのプログラムを記録する。
この発明においては、第1および第2の蓄電装置に対応して第1および第2のコンバータが設けられ、第1および第2のコンバータは、互いに並列して電力線に接続される。第1のコンバータは、電力線の電圧が目標電圧となるように制御される(電圧制御)。第2のコンバータは、第2の蓄電装置の充放電が目標量となるように制御される(電流制御または電力制御)。そして、第1および第2の蓄電装置についての電圧および充電状態の少なくとも一方に基づいて第2の蓄電装置の充放電の目標量が補正されるので、充放電が制御されない第1の蓄電装置についても、第2の蓄電装置の充放電を補正することによって電圧を操作し得る。
したがって、この発明によれば、蓄電装置の電圧変動を抑制することができる。また、第1および第2の蓄電装置間の負荷バランスをとることができる。
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
[実施の形態1]
図1は、この発明の実施の形態1による電源システムを搭載した電動車両の全体ブロック図である。図1を参照して、この電動車両100は、電源システム1と、駆動力発生部3とを備える。駆動力発生部3は、インバータ30−1,30−2と、モータジェネレータ34−1,34−2と、動力伝達機構36と、駆動軸38と、駆動ECU(Electronic Control Unit)32とを含む。
図1は、この発明の実施の形態1による電源システムを搭載した電動車両の全体ブロック図である。図1を参照して、この電動車両100は、電源システム1と、駆動力発生部3とを備える。駆動力発生部3は、インバータ30−1,30−2と、モータジェネレータ34−1,34−2と、動力伝達機構36と、駆動軸38と、駆動ECU(Electronic Control Unit)32とを含む。
インバータ30−1,30−2は、主正母線MPLおよび主負母線MNLに接続される。そして、インバータ30−1,30−2は、電源システム1から供給される駆動電力(直流電力)を交流電力に変換してそれぞれモータジェネレータ34−1,34−2へ出力する。また、インバータ30−1,30−2は、それぞれモータジェネレータ34−1,34−2が発電する交流電力を直流電力に変換して回生電力として電源システム1へ出力する。
なお、各インバータ30−1,30−2は、たとえば、三相分のスイッチング素子を含むブリッジ回路から成る。そして、インバータ30−1,30−2は、それぞれ駆動ECU32からの駆動信号PWM1,PWM2に応じてスイッチング動作を行なうことにより、対応のモータジェネレータを駆動する。
モータジェネレータ34−1,34−2は、それぞれインバータ30−1,30−2から供給される交流電力を受けて回転駆動力を発生する。また、モータジェネレータ34−1,34−2は、外部からの回転力を受けて交流電力を発生する。モータジェネレータ34−1,34−2は、たとえば、永久磁石が埋設されたロータを備える三相交流回転電機から成る。そして、モータジェネレータ34−1,34−2は、動力伝達機構36に連結され、動力伝達機構36にさらに連結される駆動軸38を介して回転駆動力が車輪(図示せず)へ伝達される。
なお、電動車両100がエンジンを備えたハイブリッド車両の場合には、モータジェネレータ34−1,34−2の一方が動力伝達機構36または駆動軸38を介してエンジン(図示せず)に連結される。そして、駆動ECU32によって、エンジンの発生する駆動力とモータジェネレータ34−1,34−2の発生する駆動力とが最適な比率となるように制御が実行される。なお、モータジェネレータ34−1,34−2の一方を専ら電動機として機能させ、他方のモータジェネレータを専ら発電機として機能させてもよい。
駆動ECU32は、図示されない各センサの検出信号、走行状況およびアクセル開度などに基づいて、モータジェネレータ34−1,34−2のトルク目標値TR1,TR2および回転数目標値MRN1,MRN2を算出する。そして、駆動ECU32は、モータジェネレータ34−1の発生トルクおよび回転数がそれぞれトルク目標値TR1および回転数目標値MRN1となるように駆動信号PWM1を生成してインバータ30−1を制御する。また、駆動ECU32は、モータジェネレータ34−2の発生トルクおよび回転数がそれぞれトルク目標値TR2および回転数目標値MRN2となるように駆動信号PWM2を生成してインバータ30−2を制御する。なお、駆動ECU32は、算出したトルク目標値TR1,TR2および回転数目標値MRN1,MRN2を電源システム1のコンバータECU2(後述)へ出力する。
一方、電源システム1は、蓄電装置6−1,6−2と、コンバータ8−1,8−2と、平滑コンデンサCと、コンバータECU2と、電池ECU4と、電流センサ10−1,10−2と、電圧センサ12−1,12−2,18とを含む。
蓄電装置6−1,6−2は、充放電可能な直流電源であり、たとえば、ニッケル水素やリチウムイオン等の二次電池から成る。蓄電装置6−1は、正極線PL1および負極線NL1を介してコンバータ8−1に接続され、蓄電装置6−2は、正極線PL2および負極線NL2を介してコンバータ8−2に接続される。
コンバータ8−1は、蓄電装置6−1と主正母線MPLおよび主負母線MNLとの間に設けられ、コンバータECU2からの駆動信号PWC1に基づいて、蓄電装置6−1と主正母線MPLおよび主負母線MNLとの間で電圧変換を行なう。コンバータ8−2は、蓄電装置6−2と主正母線MPLおよび主負母線MNLとの間に設けられ、コンバータECU2からの駆動信号PWC2に基づいて、蓄電装置6−2と主正母線MPLおよび主負母線MNLとの間で電圧変換を行なう。
平滑コンデンサCは、主正母線MPLと主負母線MNLとの間に接続され、主正母線MPLおよび主負母線MNLに含まれる電力変動成分を低減する。電圧センサ18は、主正母線MPLおよび主負母線MNL間の電圧Vhを検出し、その検出値をコンバータECU2へ出力する。
電流センサ10−1,10−2は、蓄電装置6−1に対して入出力される電流Ib1および蓄電装置6−2に対して入出力される電流Ib2をそれぞれ検出し、対応の検出値をコンバータECU2および電池ECU4へ出力する。なお、電流センサ10−1,10−2は、対応の蓄電装置から出力される電流(放電電流)を正値として検出し、対応の蓄電装置に入力される電流(充電電流)を負値として検出する。なお、この図1では、電流センサ10−1,10−2がそれぞれ正極線PL1,PL2の電流を検出する場合が示されているが、電流センサ10−1,10−2は、それぞれ負極線NL1,NL2の電流を検出してもよい。電圧センサ12−1,12−2は、蓄電装置6−1の電圧Vb1および蓄電装置6−2の電圧Vb2をそれぞれ検出し、対応の検出値をコンバータECU2および電池ECU4へ出力する。
電池ECU4は、電圧センサ12−1および電流センサ10−1からの各検出値に基づいて、蓄電装置6−1の充電状態(以下「SOC(State of Charge)」とも称する。)を示す状態量SOC1を推定し、その推定された状態量SOC1をコンバータECU2へ出力する。また、電池ECU4は、電圧センサ12−2および電流センサ10−2からの各検出値に基づいて、蓄電装置6−2のSOCを示す状態量SOC2を推定し、その推定された状態量SOC2をコンバータECU2へ出力する。なお、状態量SOC1,SOC2の算出方法については、種々の公知の手法を用いることができる。
コンバータECU2は、電流センサ10−1,10−2および電圧センサ12−1,12−2,18からの各検出値、電池ECU4からの状態量SOC1,SOC2、ならびに駆動ECU32からのトルク目標値TR1,TR2および回転数目標値MRN1,MRN2を受ける。そして、コンバータECU2は、主正母線MPLおよび主負母線MNL間の電圧Vhの目標値を示す目標電圧を算出し、電圧Vhが目標電圧となるように駆動信号PWC1を生成してコンバータ8−1を制御する。
また、コンバータECU2は、トルク目標値TR1,TR2および回転数目標値MRN1,MRN2に基づいて駆動力発生部3の要求パワーを算出し、その算出された要求パワーに基づいて、蓄電装置6−2の充放電電流の目標値を示す目標電流を算出する。そして、コンバータECU2は、電流Ib2が目標電流となるように駆動信号PWC2を生成してコンバータ8−2を制御する。
すなわち、コンバータECU2は、コンバータ8−1については電圧Vhが目標電圧となるように電圧制御し、コンバータ8−2については蓄電装置6−2の充放電電流(電流Ib2)が目標電流となるように電流制御する。
ここで、コンバータECU2は、コンバータ8−2を電流制御する際の目標電流を蓄電装置6−1,6−2の電圧Vb1,Vb2に基づいて後述の方法により補正する。これにより、蓄電装置6−1,6−2の電圧Vb1,Vb2がコンバータ8−2の電流制御に反映され、電圧Vb1,Vb2の過電圧または低電圧の防止が図られる。なお、コンバータECU2の構成については、後ほど詳しく説明する。
図2は、図1に示したコンバータ8−1,8−2の概略構成図である。なお、コンバータ8−2の構成および動作は、コンバータ8−1と同様であるので、以下ではコンバータ8−1の構成および動作について説明する。図2を参照して、コンバータ8−1は、チョッパ回路40−1と、正母線LN1Aと、負母線LN1Cと、配線LN1Bと、平滑コンデンサC1とを含む。チョッパ回路40−1は、スイッチング素子Q1A,Q1Bと、ダイオードD1A,D1Bと、インダクタL1とを含む。
正母線LN1Aは、一方端がスイッチング素子Q1Bのコレクタに接続され、他方端が主正母線MPLに接続される。負母線LN1Cは、一方端が負極線NL1に接続され、他方端が主負母線MNLに接続される。
スイッチング素子Q1A,Q1Bは、負母線LN1Cと正母線LN1Aとの間に直列に接続される。具体的には、スイッチング素子Q1Aのエミッタが負母線LN1Cに接続され、スイッチング素子Q1Bのコレクタが正母線LN1Aに接続される。ダイオードD1A,D1Bは、それぞれスイッチング素子Q1A,Q1Bに逆並列に接続される。インダクタL1は、スイッチング素子Q1A,Q1Bの接続ノードと配線LN1Bとの間に接続される。
配線LN1Bは、一方端が正極線PL1に接続され、他方端がインダクタL1に接続される。平滑コンデンサC1は、配線LN1Bと負母線LN1Cとの間に接続され、配線LN1Bおよび負母線LN1C間の直流電圧に含まれる交流成分を低減する。
チョッパ回路40−1は、コンバータECU2(図1)からの駆動信号PWC1に応じて、正極線PL1および負極線NL1に接続される蓄電装置6−1と、主正母線MPLおよび主負母線MNLとの間で双方向の直流電圧変換を行なう。駆動信号PWC1は、下アーム素子を構成するスイッチング素子Q1Aのオン/オフを制御する駆動信号PWC1Aと、上アーム素子を構成するスイッチング素子Q1Bのオン/オフを制御する駆動信号PWC1Bとを含む。そして、一定のデューティーサイクル(オン期間およびオフ期間の和)内でのスイッチング素子Q1A,Q1Bのデューティー比(オン/オフ期間比率)がコンバータECU2によって制御される。
スイッチング素子Q1Aのオンデューティーが大きくなるようにスイッチング素子Q1A,Q1Bが制御されると(スイッチング素子Q1A,Q1Bはデッドタイム期間を除いて相補的にオン/オフ制御されるので、スイッチング素子Q1Bのオンデューティーは小さくなる。)、蓄電装置6−1からインダクタL1に流れるポンプ電流量が増大し、インダクタL1に蓄積される電磁エネルギーが大きくなる。その結果、スイッチング素子Q1Aがオン状態からオフ状態に遷移したタイミングでインダクタL1からダイオードD1Bを介して主正母線MPLへ放出される電流量が増大し、主正母線MPLの電圧が上昇される。
一方、スイッチング素子Q1Bのオンデューティーが大きくなるようにスイッチング素子Q1A,Q1Bが制御されると(スイッチング素子Q1Aのオンデューティーは小さくなる。)、主正母線MPLからスイッチング素子Q1BおよびインダクタL1を介して蓄電装置6−1へ流れる電流量が増大するので、主正母線MPLの電圧は下降する。
このように、スイッチング素子Q1A,Q1Bのデューティー比を制御することによって、主正母線MPLの電圧を制御することが可能である。また、スイッチング素子Q1A,Q1Bのデューティー比を制御することによって、蓄電装置6−1と主正母線MPLとの間に流す電流(電力)の方向および電流量(電力量)を制御することも可能である。言い換えると、スイッチング素子Q1A,Q1Bのデューティー比を制御することによって、蓄電装置6−1の充放電電流(充放電電力)を制御することも可能である。
図3は、図1に示したコンバータECU2の機能ブロック図である。図3を参照して、コンバータECU2は、目標算出部60と、電圧制御部72−1と、除算部62と、補正部64と、加算部66と、電流制御部72−2とを含む。
目標算出部60は、駆動ECU32からのトルク目標値TR1,TR2および回転数目標値MRN1,MRN2に基づいて駆動力発生部3の要求パワーを算出し、その算出された要求パワーに基づいて、主正母線MPLおよび主負母線MNL間の電圧Vhの目標値を示す目標電圧VRを算出する。
また、目標算出部60は、算出された要求パワーに基づいて、蓄電装置6−2の充放電電力の目標値を示す目標電力PR2を算出する。たとえば、駆動力発生部3の要求パワーを蓄電装置6−1,6−2で均等に負担する場合、目標算出部60は、要求パワーの1/2をコンバータ8−2の目標電力PR2として算出する。なお、コンバータ8−2の目標電力PR2は要求パワーの1/2に限定されるものではなく、蓄電装置6−1,6−2の各々のSOCや温度等を考慮して要求パワーに対する蓄電装置6−1,6−2の負担配分を決定し、その配分に基づいて目標電力PR2を算出してもよい。
電圧制御部72−1は、減算部74−1,78−1と、PI制御部76−1と、変調部80−1とを含む。減算部74−1は、目標電圧VRから電圧Vhを減算し、その演算結果をPI制御部76−1へ出力する。PI制御部76−1は、目標電圧VRと電圧Vhとの偏差を入力として比例積分演算を行ない、その演算結果を減算部78−1へ出力する。
減算部78−1は、電圧Vb1/目標電圧VRで示されるコンバータ8−1の理論昇圧比の逆数からPI制御部76−1の出力を減算し、その演算結果をコンバータ8−1のデューティー指令として変調部80−1へ出力する。変調部80−1は、減算部78−1からのデューティー指令と図示されない発振部により生成される搬送波(キャリア波)とに基づいて駆動信号PWC1を生成し、その生成した駆動信号PWC1をコンバータ8−1へ出力する。
除算部62は、蓄電装置6−2に対する目標電力PR2を蓄電装置6−2の電圧Vb2で除算し、コンバータ8−2の目標電流IR2を算出する。補正部64は、蓄電装置6−1,6−2の電圧Vb1,Vb2に基づいて、電圧Vb1,Vb2が過電圧または低電圧になるのを防止するための目標電流IR2の補正量を算出する。この補正部64の構成については、後ほど説明する。そして、加算部66は、除算部62からの目標電流IR2に補正部64からの補正量を加算し、その補正された目標電流IR2Aを電流制御部72−2へ出力する。
電流制御部72−2は、減算部74−2,78−2と、PI制御部76−2と、変調部80−2とを含む。減算部74−2は、補正部64によって補正された目標電流IR2Aから電流Ib2を減算し、その演算結果をPI制御部76−2へ出力する。PI制御部76−2は、目標電流IR2Aと電流Ib2との偏差を入力として比例積分演算を行ない、その演算結果を減算部78−2へ出力する。
減算部78−2は、電圧Vb2/目標電圧VRで示されるコンバータ8−2の理論昇圧比の逆数からPI制御部76−2の出力を減算し、その演算結果をコンバータ8−2のデューティー指令として変調部80−2へ出力する。変調部80−2は、減算部78−2からのデューティー指令と図示されない発振部により生成される搬送波(キャリア波)とに基づいて駆動信号PWC2を生成し、その生成した駆動信号PWC2をコンバータ8−2へ出力する。
図4は、図3に示した補正部64の詳細な機能ブロック図である。図4を参照して、補正部64は、第1演算部82と、第2演算部84と、加算部86とから成る。第1演算部82は、蓄電装置6−1の電圧Vb1に基づいて、目標電流IR2の第1補正量ΔI1を算出する。第2演算部84は、蓄電装置6−2の電圧Vb2に基づいて、目標電流IR2の第2補正量ΔI2を算出する。加算部86は、第1補正量ΔI1に第2補正量ΔI2を加算して加算部66へ出力する。
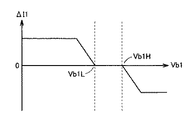
図5は、電圧Vb1と第1補正量ΔI1との関係を示した図である。図5を参照して、電圧Vb1が下限値Vb1Lよりも低いとき、第1演算部82は、正値の第1補正量ΔI1を出力する。一方、電圧Vb1が上限値Vb1Hよりも高いとき、第1演算部82は、負値の第1補正量ΔI1を出力する。
すなわち、電圧Vb1が下限値Vb1Lよりも低いとき、蓄電装置6−2の放電量が増加し、または蓄電装置6−2の充電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、蓄電装置6−1の放電量が減少し、または蓄電装置6−1の充電量が増加するので、電圧Vb1の低下が抑制される。
一方、電圧Vb1が上限値Vb1Hよりも高いとき、蓄電装置6−2の充電量が増加し、または蓄電装置6−2の放電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、蓄電装置6−1の放電量が増加し、または蓄電装置6−1の充電量が減少するので、電圧Vb1の上昇が抑制される。
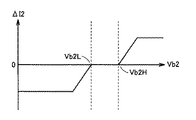
図6は、電圧Vb2と第2補正量ΔI2との関係を示した図である。図6を参照して、電圧Vb2が下限値Vb2Lよりも低いとき、第2演算部84は、負値の第2補正量ΔI2を出力する。一方、電圧Vb2が上限値Vb2Hよりも高いとき、第2演算部84は、正値の第2補正量ΔI2を出力する。
すなわち、電圧Vb2が下限値Vb2Lよりも低いとき、蓄電装置6−2の充電量が増加し、または蓄電装置6−2の放電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、電圧Vb2の低下が抑制される。一方、電圧Vb2が上限値Vb2Hよりも高いとき、蓄電装置6−2の放電量が増加し、または蓄電装置6−2の充電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、電圧Vb2の上昇が抑制される。
図7は、図1に示したコンバータECU2の制御構造を説明するためのフローチャートである。なお、このフローチャートに示される処理は、一定時間ごとまたは所定の条件成立時にメインルーチンから呼び出されて実行される。
図7を参照して、コンバータECU2は、上述の方法により、電圧Vhの目標電圧VRおよび電流制御されるコンバータ8−2の目標電流IR2を算出する(ステップS10)。目標電圧VRおよび目標電流IR2が算出されると、コンバータECU2は、電圧Vb1が上限値Vb1Hよりも高いか否かを判定する(ステップS20)。
電圧Vb1が上限値Vb1Hよりも高いと判定されると(ステップS20においてYES)、コンバータECU2は、目標電流IR2を負の方向(蓄電装置6−2の放電時を正とする。)へ補正する(ステップS30)。そして、コンバータECU2は、ステップS100へ処理を移行し、電圧Vhが目標電圧VRとなるようにコンバータ8−1を電圧制御し、電流Ib2が補正後の目標電流IR2Aとなるようにコンバータ8−2を電流制御する(ステップS100)。
一方、ステップS20において電圧Vb1が上限値Vb1H以下であると判定されると(ステップS20においてNO)、コンバータECU2は、電圧Vb1が下限値Vb1Lよりも低いか否かを判定する(ステップS40)。電圧Vb1が下限値Vb1Lよりも低いと判定されると(ステップS40においてYES)、コンバータECU2は、目標電流IR2を正の方向へ補正する(ステップS50)。その後、コンバータECU2は、ステップS100へ処理を移行する。ステップS40において電圧Vb1が下限値Vb1L以上であると判定されると(ステップS40においてNO)、コンバータECU2は、目標電流IR2を補正することなくステップS100へ処理を移行する。
また、ステップS10において目標電圧VRおよび目標電流IR2が算出されると、コンバータECU2は、電圧Vb2が上限値Vb2Hよりも高いか否かをさらに判定する(ステップS60)。電圧Vb2が上限値Vb2Hよりも高いと判定されると(ステップS60においてYES)、コンバータECU2は、目標電流IR2を正の方向に補正する(ステップS70)。その後、コンバータECU2はステップS100へ処理を移行する。
一方、ステップS60において電圧Vb2が上限値Vb2H以下であると判定されると(ステップS60においてNO)、コンバータECU2は、電圧Vb2が下限値Vb2Lよりも低いか否かを判定する(ステップS80)。電圧Vb2が下限値Vb2Lよりも低いと判定されると(ステップS80においてYES)、コンバータECU2は、目標電流IR2を負の方向に補正する(ステップS90)。その後、コンバータECU2は、ステップS100へ処理を移行する。ステップS80において電圧Vb2が下限値Vb2L以上であると判定されると(ステップS80においてNO)、コンバータECU2は、目標電流IR2を補正することなくステップS100へ処理を移行する。
以上のように、この実施の形態1においては、コンバータ8−1,8−2は、主正母線MPLおよび主負母線MNLに接続される。コンバータ8−1は、電圧Vhが目標電圧VRとなるように制御される(電圧制御)。コンバータ8−2は、蓄電装置6−2の電流Ib2が目標電流となるように制御される(電流制御)。そして、蓄電装置6−1,6−2の電圧Vb1,Vb2に基づいて電流制御における目標電流が補正されるので、充放電が制御されない蓄電装置6−1についても、蓄電装置6−2の充放電を補正することによって電圧を操作し得る。したがって、この実施の形態1によれば、蓄電装置6−1,6−2の電圧変動を抑制することができる。また、蓄電装置6−1,6−2間の負荷バランスをとることができる。
[実施の形態2]
実施の形態1では、蓄電装置6−1,6−2の電圧Vb1,Vb2に基づいて目標電流IR2の補正量を算出するものとしたが、実施の形態2では、蓄電装置6−1,6−2のSOCに基づいて目標電流IR2の補正量が算出される。
実施の形態1では、蓄電装置6−1,6−2の電圧Vb1,Vb2に基づいて目標電流IR2の補正量を算出するものとしたが、実施の形態2では、蓄電装置6−1,6−2のSOCに基づいて目標電流IR2の補正量が算出される。
この実施の形態2による電動車両は、実施の形態1による電動車両の構成において、コンバータECU2に代えてコンバータECU2Aを含む。コンバータECU2Aは、コンバータECU2の構成において、補正部64に代えて補正部64Aを含む。
図8は、実施の形態2における補正部64Aの機能ブロック図である。図8を参照して、補正部64Aは、第1演算部82Aと、第2演算部84Aと、加算部86とから成る。第1演算部82Aは、蓄電装置6−1のSOCを示す状態量SOC1に基づいて、目標電流IR2の第1補正量ΔI1を算出する。第2演算部84Aは、蓄電装置6−2のSOCを示す状態量SOC2に基づいて、目標電流IR2の第2補正量ΔI2を算出する。そして、加算部86は、第1補正量ΔI1に第2補正量ΔI2を加算して加算部66へ出力する。
図9は、状態量SOC1と第1補正量ΔI1との関係を示した図である。図9を参照して、状態量SOC1が下限値SOC1Lよりも低いとき、第1演算部82Aは、正値の第1補正量ΔI1を出力する。一方、状態量SOC1が上限値SOC1Hよりも高いとき、第1演算部82Aは、負値の第1補正量ΔI1を出力する。
すなわち、状態量SOC1が下限値SOC1Lよりも低いとき、蓄電装置6−2の放電量が増加し、または蓄電装置6−2の充電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、蓄電装置6−1の放電量が減少し、または蓄電装置6−1の充電量が増加するので、電圧Vb1の低下が抑制される。
一方、状態量SOC1が上限値SOC1Hよりも高いとき、蓄電装置6−2の充電量が増加し、または蓄電装置6−2の放電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、蓄電装置6−1の放電量が増加し、または蓄電装置6−1の充電量が減少するので、電圧Vb1の上昇が抑制される。
図10は、状態量SOC2と第2補正量ΔI2との関係を示した図である。図10を参照して、状態量SOC2が下限値SOC2Lよりも低いとき、第2演算部84Aは、負値の第2補正量ΔI2を出力する。一方、状態量SOC2が上限値SOC2Hよりも高いとき、第2演算部84Aは、正値の第2補正量ΔI2を出力する。
すなわち、状態量SOC2が下限値SOC2Lよりも低いとき、蓄電装置6−2の充電量が増加し、または蓄電装置6−2の放電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、電圧Vb2の低下が抑制される。一方、状態量SOC2が上限値SOC2Hよりも高いとき、蓄電装置6−2の放電量が増加し、または蓄電装置6−2の充電量が減少するように、コンバータ8−2の目標電流が補正される。これにより、電圧Vb2の上昇が抑制される。
図11は、実施の形態2におけるコンバータECU2Aの制御構造を説明するためのフローチャートである。なお、このフローチャートに示される処理も、一定時間ごとまたは所定の条件成立時にメインルーチンから呼び出されて実行される。
図11を参照して、このフローチャートは、図7に示したフローチャートにおいて、ステップS20,S40,S60,S80に代えてそれぞれステップS22,S42,S62,S82を含む。
すなわち、ステップS10において目標電圧VRおよび目標電流IR2が算出されると、コンバータECU2Aは、蓄電装置6−1の状態量SOC1が上限値SOC1Hよりも高いか否かを判定する(ステップS22)。状態量SOC1が上限値SOC1Hよりも高いと判定されると(ステップS22においてYES)、コンバータECU2Aは、ステップS30へ処理を移行し、目標電流IR2が負の方向へ補正される。
一方、ステップS22において状態量SOC1が上限値SOC1H以下であると判定されると(ステップS22においてNO)、コンバータECU2Aは、状態量SOC1が下限値SOC1Lよりも低いか否かを判定する(ステップS42)。状態量SOC1が下限値SOC1Lよりも低いと判定されると(ステップS42においてYES)、コンバータECU2Aは、ステップS50へ処理を移行し、目標電流IR2が正の方向へ補正される。状態量SOC1が下限値SOC1L以上であると判定されると(ステップS42においてNO)、コンバータECU2Aは、目標電流IR2を補正することなくステップS100へ処理を移行する。
また、ステップS10において目標電圧VRおよび目標電流IR2が算出されると、コンバータECU2Aは、蓄電装置6−2の状態量SOC2が上限値SOC2Hよりも高いか否かをさらに判定する(ステップS62)。状態量SOC2が上限値SOC2Hよりも高いと判定されると(ステップS62においてYES)、コンバータECU2Aは、ステップS70へ処理を移行し、目標電流IR2が正の方向へ補正される。
一方、ステップS62において状態量SOC2が上限値SOC2H以下であると判定されると(ステップS62においてNO)、コンバータECU2Aは、状態量SOC2が下限値SOC2Lよりも低いか否かを判定する(ステップS82)。状態量SOC2が下限値SOC2Lよりも低いと判定されると(ステップS82においてYES)、コンバータECU2Aは、ステップS90へ処理を移行し、目標電流IR2が負の方向へ補正される。状態量SOC2が下限値SOC2L以上であると判定されると(ステップS82においてNO)、コンバータECU2Aは、目標電流IR2を補正することなくステップS100へ処理を移行する。
以上のように、この実施の形態2においては、蓄電装置6−1,6−2の状態量SOC1,SOC2に基づいて電流制御における目標電流が補正されるので、充放電が制御されない蓄電装置6−1についても、蓄電装置6−2の充放電を補正することによって電圧を操作し得る。したがって、この実施の形態2によっても、蓄電装置6−1,6−2の電圧変動を抑制することが可能である。また、蓄電装置6−1,6−2間の負荷バランスをとることも可能である。
[実施の形態3]
再び図3を参照して、電流制御部72−2は、目標電流IR2Aおよび電流Ib2に基づくフィードバック(FB)補償に加えて、電圧Vb2/目標電圧VRで示されるフィードフォワード(FF)補償を含む。しかしながら、このFF補償においては、目標電圧VRが用いられているため、電圧Vhが急変して電圧Vhと目標電圧VRとが大きく乖離すると、FB補償による電流制御の制御性が悪化する。一方、電圧Vhが目標電圧VRに追従しているときは、制御の安定性の観点から、FF補償には目標電圧VRを用いる方が望ましい。
再び図3を参照して、電流制御部72−2は、目標電流IR2Aおよび電流Ib2に基づくフィードバック(FB)補償に加えて、電圧Vb2/目標電圧VRで示されるフィードフォワード(FF)補償を含む。しかしながら、このFF補償においては、目標電圧VRが用いられているため、電圧Vhが急変して電圧Vhと目標電圧VRとが大きく乖離すると、FB補償による電流制御の制御性が悪化する。一方、電圧Vhが目標電圧VRに追従しているときは、制御の安定性の観点から、FF補償には目標電圧VRを用いる方が望ましい。
そこで、この実施の形態3では、目標電圧VRからの電圧Vhの偏差を監視し、偏差が小さい場合には電流制御部のFF補償項に目標電圧VRを用い、偏差が大きい場合には電流制御部のFF補償項に実績の電圧Vhを用いることとする。
図12は、実施の形態3におけるコンバータECU2Bの機能ブロック図である。図12を参照して、コンバータECU2Bは、図3に示したコンバータECU2(2A)の構成において、電流制御部72−2に代えて電流制御部72−2Aを含む。電流制御部72−2Aは、電流制御部72−2の構成において、FF補償量算出部88をさらに含む。FF補償量算出部88は、電圧Vh、その目標電圧VRおよび電圧Vb2に基づいて、コンバータ8−2の昇圧比に基づくFF補償量を算出し、その算出結果を減算部78−2へ出力する。
図13は、図12に示したFF補償量算出部88の機能ブロック図である。図13を参照して、FF補償量算出部88は、減算部90と、判定部92と、切替部94と、除算部96とを含む。減算部90は、目標電圧VRから電圧Vhを減算することにより偏差ΔVhを算出し、その算出結果を判定部92へ出力する。判定部92は、図14に示されるように、上限値ΔVhHおよび下限値ΔVhLにより規定される範囲を偏差ΔVhが超えると切替信号SWを活性化し、偏差ΔVhが上記の範囲内の場合には切替信号SWを非活性化する。
切替部94は、目標電圧VRおよび電圧Vhを受ける。そして、切替部94は、切替信号SWが活性化されているとき、電圧Vh(実績)を除算部96へ出力し、切替信号SWが非活性化されているときは、目標電圧VRを除算部96へ出力する。すなわち、電圧Vhと目標電圧VRとの偏差ΔVhが大きいときは実績の電圧Vhが選択され、偏差ΔVhが小さいときは目標電圧VRが選択される。
除算部96は、電圧Vb2を切替部94からの出力で除算し、その演算結果をFF補償量として出力する。すなわち、電圧Vhと目標電圧VRとの偏差ΔVhが大きいとき、FF補償量は、実績の電圧Vhを用いた電圧Vb2/電圧Vhで示される値からなり、偏差ΔVhが小さいときは、FF補償量は、目標電圧VRを用いた電圧Vb2/目標電圧VRで示される値からなる。
図15は、実施の形態3におけるコンバータECU2Bによる電流制御に係る処理のフローチャートである。なお、このフローチャートに示される処理は、図7および図11に示したフローチャートのステップS100におけるコンバータ8−2の電流制御の処理にて実行される。
図15を参照して、コンバータECU2Bは、目標電流IR2および電流Ib2に基づいてFB補償量を算出する(ステップS110)。次いで、コンバータECU2Bは、目標電圧VRから電圧Vhを差引いた値(偏差ΔVh)が規定の上限値ΔVhHよりも大きいか否かを判定する(ステップS120)。
ステップS120において偏差ΔVhが上限値ΔVhHよりも大きいと判定されると(ステップS120においてYES)、コンバータECU2Bは、電圧Vh(実績)および電圧Vb2に基づいてFF補償量を算出する(ステップS130)。具体的には、コンバータECU2Bは、電圧Vb2を電圧Vhで除算することによりFF補償量を算出する。
ステップS120において偏差ΔVhが上限値ΔVhH以下であると判定されると(ステップS120においてNO)、コンバータECU2Bは、目標電圧VRから電圧Vhを差引いた値(偏差ΔVh)が規定の下限値ΔVhLよりも小さいか否かを判定する(ステップS140)。
ステップS140において偏差ΔVhが下限値ΔVhLよりも小さいと判定されると(ステップS140においてYES)、コンバータECU2Bは、ステップS130へ処理を移行し、電圧Vhおよび電圧Vb2に基づいてFF補償量を算出する。
一方、ステップS140において偏差ΔVhが下限値ΔVhL以上であると判定されると(ステップS140においてNO)、コンバータECU2Bは、目標電圧VRおよび電圧Vb2に基づいてFF補償量を算出する(ステップS150)。具体的には、コンバータECU2Bは、電圧Vb2を目標電圧VRで除算することによりFF補償量を算出する。
なお、上記において、切替部94が作動すると切替部94の出力がステップ状に変化するところ、切替部94の出力側にフィルターや変化レート制限処理などを設けてもよい。
また、上記においては、電圧Vhの検出値に基づいて目標電圧VRからの電圧Vhの偏差ΔVhの大小を判定するものとしたが、たとえば、モータジェネレータ34−1,34−2の回転数の変動に基づいて電圧Vhの変動を予測し、その予測結果に基づいて偏差ΔVhの大小の判定を行なってもよい。これにより、より迅速な切替が期待できる。あるいは、蓄電装置6−1,6−2の入出力変動に基づいて電圧Vhの変動を予測し、その予測結果に基づいて偏差ΔVhの大小の判定を行なってもよい。
また、判定部92において、切替信号SWが活性化されるときの偏差ΔVhのしきい値と切替信号SWが非活性化されるときのしきい値とにヒステリシスを設けてもよい。これにより、切替部94のチャタリングを防止することができる。
以上のように、この実施の形態3によれば、目標電圧VRからの電圧Vhの偏差が小さい場合には、電流制御部のFF補償項に目標電圧VRが用いられ、偏差が大きい場合には、電流制御部のFF補償項に実績の電圧Vhが用いられるので、制御の安定性に配慮しつつ電流制御の制御性を向上させることができる。
なお、上記において、コンバータECU2,2A,2Bにおける制御は、実際には、CPU(Central Processing Unit)によって行なわれ、CPUは、図7,11,15に示したフローチャートの各ステップを備えるプログラムをROM(Read Only Memory)から読出し、その読出したプログラムを実行して上記各図に示したフローチャートに従って処理を実行する。したがって、ROMは、上記各図に示したフローチャートの各ステップを備えるプログラムを記録したコンピュータ(CPU)読取可能な記録媒体に相当する。
なお、上記の各実施の形態においては、コンバータ8−2については電流FB制御を行なうものとしたが、目標算出部60によって算出された目標電力PR2を電圧Vb2で除算することなく、目標電力PR2を直接の制御目標値とする電力FB制御を行なってもよい。この場合、たとえば、検出された電流Ib2に電圧Vb2を乗算して電力実績を算出し、補正部64,64Aにより補正された目標電力と電力実績との偏差に基づいてFB補償量を算出すればよい。
また、上記においては、コンバータ8−1を電圧制御し、コンバータ8−2を電流制御(電力制御)するものとしたが、コンバータ8−2を電圧制御し、コンバータ8−1を電流制御(電力制御)してもよい。
また、上記においては、コンバータECU2(2A,2B)、電池ECU4および駆動ECU32をそれぞれ個別のECUで構成するものとしたが、ECUの構成はこれらに限られるものではなく、コンバータECU2(2A,2B)と電池ECU4とを一つのECUで構成してもよいし、コンバータECU2(2A,2B)と駆動ECU32とを一つのECUで構成してもよい。あるいは、コンバータECU2(2A,2B)、電池ECU4および駆動ECU32をまとめて一つのECUで構成してもよい。
また、この発明は、動力源としてエンジンを備えるハイブリッド車両や、エンジンを備えずに電力のみで走行する電気自動車、直流電源として燃料電池をさらに備える燃料電池車などの電動車両全般に適用可能である。
なお、上記において、蓄電装置6−1,6−2は、それぞれこの発明における「第1の蓄電装置」および「第2の蓄電装置」に対応し、コンバータ8−1,8−2は、それぞれこの発明における「第1のコンバータ」および「第2のコンバータ」に対応する。また、主正母線MPLおよび主負母線MNLは、この発明における「電力線」を形成し、コンバータECU2,2A,2Bは、この発明における「制御装置」に対応する。さらに、電圧制御部72−1は、この発明における「第1の制御部」に対応し、電圧制御部72−2,72−2Aは、この発明における「第2の制御部」に対応する。また、さらに、インバータ30−1,30−2は、この発明における「駆動装置」を形成し、モータジェネレータ34−1,34−2の少なくとも一方は、この発明における「電動機」に対応する。
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
1 電源システム、2,2A,2B コンバータECU、3 駆動力発生部、4 電池ECU、6−1,6−2 蓄電装置、8−1,8−2 コンバータ、10−1,10−2 電流センサ、12−1,12−2,18 電圧センサ、30−1,30−2 インバータ、32 駆動ECU、34−1,34−2 モータジェネレータ、36 動力伝達機構、38 駆動軸、60 目標算出部、62,96 除算部、64,64A 補正部、66,86 加算部、72−1 電圧制御部、72−2,72−2A 電流制御部、74−1,74−2,78−1,78−2,90 減算部、76−1,76−2 PI制御部、80−1,80−2 変調部、82,82A 第1演算部、84,84A 第2演算部、88 FF補償量算出部、92 判定部、94 切替部、100 電動車両、MPL 主正母線、MNL 主負母線、C,C1,C2 平滑コンデンサ、PL1,PL2 正極線、NL1,NL2 負極線、LN1A,LN2A 正母線、LN1B,LN2B 配線、LN1C,LN2C 負母線、Q1A,Q1B,Q2A,Q2B トランジスタ、D1A,D1B,D2A,D2B ダイオード、L1,L2 インダクタ。
Claims (14)
- 負荷装置と電力を授受可能な電源システムであって、
充放電可能な第1および第2の蓄電装置と、
当該電源システムと前記負荷装置との間で電力を授受可能に構成された電力線と、
前記第1の蓄電装置と前記電力線との間に設けられる第1のコンバータと、
前記第2の蓄電装置と前記電力線との間に設けられる第2のコンバータと、
前記第1および第2のコンバータを制御する制御装置とを備え、
前記制御装置は、
前記電力線の電圧が目標電圧となるように前記第1のコンバータを制御する第1の制御部と、
前記第2の蓄電装置の充放電が目標量となるように前記第2のコンバータを制御する第2の制御部と、
前記第1および第2の蓄電装置についての電圧および充電状態の少なくとも一方に基づいて前記目標量を補正する補正部とを含む、電源システム。 - 前記第2の制御部は、
前記目標量と前記第2の蓄電装置の充放電量との偏差に基づいてフィードバック補償量を算出するフィードバック補償部と、
前記第2の蓄電装置の電圧と前記電力線の電圧とに基づいてフィードフォワード補償量を算出するフィードフォワード補償部と、
前記電力線の電圧実績と前記目標電圧との偏差が規定の範囲内のとき、前記フィードフォワード補償部において前記電力線の電圧として前記目標電圧を用い、前記偏差が前記規定の範囲を外れたとき、前記フィードフォワード補償部において前記電力線の電圧として前記電圧実績を用いる切替部とを含む、請求項1に記載の電源システム。 - 前記補正部は、前記第1の蓄電装置の電圧が規定の第1のしきい値よりも低いとき、前記第2の蓄電装置の放電量が増加し、または前記第2の蓄電装置の充電量が減少するように、前記目標量を補正する、請求項1または請求項2に記載の電源システム。
- 前記補正部は、前記第1の蓄電装置の電圧が規定の第2のしきい値よりも高いとき、前記第2の蓄電装置の充電量が増加し、または前記第2の蓄電装置の放電量が減少するように、前記目標量を補正する、請求項1から請求項3のいずれか1項に記載の電源システム。
- 前記補正部は、前記第2の蓄電装置の電圧が規定の第3のしきい値よりも低いとき、前記第2の蓄電装置の充電量が増加し、または前記第2の蓄電装置の放電量が減少するように、前記目標量を補正する、請求項1から請求項4のいずれか1項に記載の電源システム。
- 前記補正部は、前記第2の蓄電装置の電圧が規定の第4のしきい値よりも高いとき、前記第2の蓄電装置の放電量が増加し、または前記第2の蓄電装置の充電量が減少するように、前記目標量を補正する、請求項1から請求項5のいずれか1項に記載の電源システム。
- 前記補正部は、前記第1の蓄電装置の充電状態を示す状態量が規定の第1のしきい値よりも少ないとき、前記第2の蓄電装置の放電量が増加し、または前記第2の蓄電装置の充電量が減少するように、前記目標量を補正する、請求項1または請求項2に記載の電源システム。
- 前記補正部は、前記第1の蓄電装置の充電状態を示す状態量が規定の第2のしきい値よりも多いとき、前記第2の蓄電装置の充電量が増加し、または前記第2の蓄電装置の放電量が減少するように、前記目標量を補正する、請求項1、請求項2および請求項7のいずれか1項に記載の電源システム。
- 前記補正部は、前記第2の蓄電装置の充電状態を示す状態量が規定の第3のしきい値よりも少ないとき、前記第2の蓄電装置の充電量が増加し、または前記第2の蓄電装置の放電量が減少するように、前記目標量を補正する、請求項1、請求項2、請求項7および請求項8のいずれか1項に記載の電源システム。
- 前記補正部は、前記第2の蓄電装置の充電状態を示す状態量が規定の第4のしきい値よりも多いとき、前記第2の蓄電装置の放電量が増加し、または前記第2の蓄電装置の充電量が減少するように、前記目標量を補正する、請求項1、請求項2および請求項7から請求項9のいずれか1項に記載の電源システム。
- 請求項1から請求項10のいずれか1項に記載の電源システムと、
前記電源システムと電力を授受可能な駆動装置と、
前記駆動装置によって駆動される電動機と、
前記電動機によって駆動される車輪とを備える電動車両。 - 負荷装置と電力を授受可能な電源システムの制御方法であって、
前記電源システムは、
充放電可能な第1および第2の蓄電装置と、
当該電源システムと前記負荷装置との間で電力を授受可能に構成された電力線と、
前記第1の蓄電装置と前記電力線との間に設けられる第1のコンバータと、
前記第2の蓄電装置と前記電力線との間に設けられる第2のコンバータとを備え、
前記制御方法は、
前記電力線の電圧が目標電圧となるように前記第1のコンバータを制御するステップと、
前記第2の蓄電装置の充放電が目標量となるように前記第2のコンバータを制御するステップと、
前記第1および第2の蓄電装置についての電圧および充電状態の少なくとも一方に基づいて前記目標量を補正するステップとを含む、電源システムの制御方法。 - 前記第2のコンバータを制御するステップは、
前記目標量と前記第2の蓄電装置の充放電量との偏差に基づいてフィードバック補償量を算出するサブステップと、
前記電力線の電圧実績と前記目標電圧との偏差が規定の範囲内か否かを判定するサブステップと、
前記偏差が前記規定の範囲内であると判定されると、前記第2の蓄電装置の電圧と前記目標電圧とに基づいてフィードフォワード補償量を算出するサブステップと、
前記偏差が前記規定の範囲外であると判定されると、前記第2の蓄電装置の電圧と前記電力線の電圧実績とに基づいて前記フィードフォワード補償量を算出するサブステップとを含む、請求項12に記載の電源システムの制御方法。 - 請求項12または請求項13に記載の電源システムの制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008026561A JP2009189152A (ja) | 2008-02-06 | 2008-02-06 | 電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008026561A JP2009189152A (ja) | 2008-02-06 | 2008-02-06 | 電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009189152A true JP2009189152A (ja) | 2009-08-20 |
Family
ID=41071836
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008026561A Withdrawn JP2009189152A (ja) | 2008-02-06 | 2008-02-06 | 電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009189152A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010098823A (ja) * | 2008-10-15 | 2010-04-30 | Toyota Motor Corp | 電動車両およびその制御方法 |
| WO2012086057A1 (ja) | 2010-12-24 | 2012-06-28 | トヨタ自動車株式会社 | 電源システムおよびそれを搭載する車両、ならびに蓄電装置の制御方法 |
| JP2012201160A (ja) * | 2011-03-24 | 2012-10-22 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2013189193A (ja) * | 2013-04-04 | 2013-09-26 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| US8793041B2 (en) | 2008-10-31 | 2014-07-29 | Toyota Jidosha Kabushiki Kaisha | Electric powered vehicle and control method for the same |
| JP2015070662A (ja) * | 2013-09-27 | 2015-04-13 | 日産自動車株式会社 | 車両用電源供給装置 |
| JPWO2014073106A1 (ja) * | 2012-11-12 | 2016-09-08 | ボルボトラックコーポレーション | 充放電システム |
| EP3340456B1 (en) | 2016-12-21 | 2021-04-14 | Danfoss Mobile Electrification Oy | An electric system for an electromechanical power transmission chain |
| JP7563436B2 (ja) | 2022-09-20 | 2024-10-08 | トヨタ自動車株式会社 | 電源システム |
-
2008
- 2008-02-06 JP JP2008026561A patent/JP2009189152A/ja not_active Withdrawn
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010098823A (ja) * | 2008-10-15 | 2010-04-30 | Toyota Motor Corp | 電動車両およびその制御方法 |
| US7953525B2 (en) | 2008-10-15 | 2011-05-31 | Toyota Jidosha Kabushiki Kaisha | Electrical powered vehicle incorporating motor and inverter, and control method therefor |
| US8793041B2 (en) | 2008-10-31 | 2014-07-29 | Toyota Jidosha Kabushiki Kaisha | Electric powered vehicle and control method for the same |
| WO2012086057A1 (ja) | 2010-12-24 | 2012-06-28 | トヨタ自動車株式会社 | 電源システムおよびそれを搭載する車両、ならびに蓄電装置の制御方法 |
| US8922170B2 (en) | 2010-12-24 | 2014-12-30 | Toyota Jidosha Kabushiki Kaisha | Electric power supply system and vehicle having the same mounted therein, and method of controlling electric power storage device |
| JP2012201160A (ja) * | 2011-03-24 | 2012-10-22 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| JPWO2014073106A1 (ja) * | 2012-11-12 | 2016-09-08 | ボルボトラックコーポレーション | 充放電システム |
| JP2013189193A (ja) * | 2013-04-04 | 2013-09-26 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2015070662A (ja) * | 2013-09-27 | 2015-04-13 | 日産自動車株式会社 | 車両用電源供給装置 |
| EP3340456B1 (en) | 2016-12-21 | 2021-04-14 | Danfoss Mobile Electrification Oy | An electric system for an electromechanical power transmission chain |
| JP7563436B2 (ja) | 2022-09-20 | 2024-10-08 | トヨタ自動車株式会社 | 電源システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4380772B2 (ja) | 電源装置およびそれを備えた車両、電源装置の制御方法、ならびにその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP4379441B2 (ja) | 電源システムおよびそれを備えた車両、蓄電装置の昇温制御方法、ならびに蓄電装置の昇温制御をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| CN101512869B (zh) | 电源系统和具备该电源系统的车辆、蓄电装置的升温控制方法 | |
| JP4656042B2 (ja) | 電源システムおよびそれを備えた車両、電源システムの制御方法、ならびに電源システムの制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| CN101496253B (zh) | 电源系统 | |
| JP4193704B2 (ja) | 電源装置およびそれを搭載する自動車 | |
| US9849789B2 (en) | Power supply system | |
| JP2009189152A (ja) | 電源システム、電動車両、電源システムの制御方法、およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP4840374B2 (ja) | 電動車両、電動車両の制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| US11427179B2 (en) | Power supply system | |
| JP4816575B2 (ja) | 電源システムおよびそれを備えた車両、ならびに電源システムの制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| US9895980B2 (en) | Power supply system | |
| JP6102841B2 (ja) | 電源システム | |
| JP5320988B2 (ja) | 電源システムおよびその電力収支制御方法 | |
| JP5326905B2 (ja) | 電源システムおよびそれを備える電動車両、ならびに電源システムの制御方法 | |
| JP4882850B2 (ja) | 電源システム、電源システムの制御方法、および電源システムの制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP4665890B2 (ja) | 電源装置、および電源装置を備える車両 | |
| JP5109958B2 (ja) | 電源システムおよびそれを備えた車両、ならびに電源システムの制御方法 | |
| JP2022088964A (ja) | 電源システム | |
| JP2009213288A (ja) | 電源システムおよびそれを備えた車両、ならびに電源システムの制御方法 | |
| JP2010074885A (ja) | 電源システムおよびその制御方法 | |
| JP2008306821A (ja) | 電源システムおよびそれを備えた車両、ならびに電源システムの制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP2010136475A (ja) | 電源システムの制御装置およびそれを備えた車両ならびに電源システムの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20110510 |