JP2009162109A - バルブタイミング調整装置 - Google Patents
バルブタイミング調整装置 Download PDFInfo
- Publication number
- JP2009162109A JP2009162109A JP2008000754A JP2008000754A JP2009162109A JP 2009162109 A JP2009162109 A JP 2009162109A JP 2008000754 A JP2008000754 A JP 2008000754A JP 2008000754 A JP2008000754 A JP 2008000754A JP 2009162109 A JP2009162109 A JP 2009162109A
- Authority
- JP
- Japan
- Prior art keywords
- piston member
- combustion engine
- internal combustion
- phase
- driven
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Valve Device For Special Equipments (AREA)
Abstract
【課題】内燃機関の運転状態に応じて適切なバルブタイミングを実現すること。
【解決手段】クランク軸と連動回転する駆動側回転体10のストッパ面70aは、カム軸2と連動回転する従動側回転体20のストッパ面73aに対して、従動側回転体20を付勢する平均カムトルクの偏り側Yにある。駆動側回転体10に往復移動自在に支持されるピストン部材82は、ストッパ面70a,73a間に突入する突入位置と、突入位置から抜出する抜出位置とが移動位置として設定されており、作動流体の圧力により抜出位置側へ、また復原力により突入位置側へ押圧される。そして、流体供給源としてのポンプ9は、内燃機関の始動に伴ってピストン部材82への作動流体の供給を開始し、内燃機関の停止に伴ってピストン部材82への作動流体の供給を停止する。
【選択図】図4
【解決手段】クランク軸と連動回転する駆動側回転体10のストッパ面70aは、カム軸2と連動回転する従動側回転体20のストッパ面73aに対して、従動側回転体20を付勢する平均カムトルクの偏り側Yにある。駆動側回転体10に往復移動自在に支持されるピストン部材82は、ストッパ面70a,73a間に突入する突入位置と、突入位置から抜出する抜出位置とが移動位置として設定されており、作動流体の圧力により抜出位置側へ、また復原力により突入位置側へ押圧される。そして、流体供給源としてのポンプ9は、内燃機関の始動に伴ってピストン部材82への作動流体の供給を開始し、内燃機関の停止に伴ってピストン部材82への作動流体の供給を停止する。
【選択図】図4
Description
本発明は、内燃機関においてクランク軸からのトルク伝達によりカム軸が開閉する吸気弁及び排気弁のうち少なくとも一方のバルブタイミングを調整するバルブタイミング調整装置に関する。
従来、クランク軸と連動して回転する駆動側回転体及びカム軸と連動して回転する従動側回転体の間の相対位相を変化させることにより、所望のバルブタイミングを実現するようにしたバルブタイミング調整装置が知られている。
こうしたバルブタイミング調整装置の一種として特許文献1に開示される装置では、駆動側回転体に設けたノッチの側面を従動側回転体に設けた歯の側面と当接させることにより、それら回転体間の相対位相変化を規制している。これにより、バルブタイミングの調整範囲として、内燃機関の運転状態に適した範囲を確保することが可能となっている。
また、バルブタイミング調整装置の別の一種として特許文献2に開示される装置では、電動アクチュエータの回転出力を利用することにより、内燃機関の始動時における駆動側及び従動側回転体間の相対位相を、最遅角位相よりも進角側且つ最進角位相よりも遅角側の中間位相に保持している。これにより、内燃機関の始動に適切なバルブタイミングを実現する中間位相を始動位相として、機関始動性を確保することが可能となっている。
独国特許発明第4110195C2号明細書
特開2004−132323号公報
さて、上述した特許文献1,2に開示の装置を組み合わせることによれば、内燃機関の運転状態にかかわらず、常に適切なバルブタイミングを実現することが可能となるはずである。しかしながら、本発明者らが鋭意研究を行った結果、内燃機関の始動時には、駆動側及び従動側回転体間の相対位相を電動アクチュエータの回転出力によって正確に始動位相に保持することは難しい、との知見が得られた。以下、その理由を説明する。
内燃機関の始動時において、カム軸と連動して回転する従動側回転体には、カム軸の回転に応じて駆動側回転体に対する遅角側及び進角側へ交番するカムトルクが作用する。このとき、カム軸を支持する軸受のフリクション等に起因して、カムトルクの平均トルクが駆動側回転体に対する遅角側に偏って作用するような場合には、駆動側回転体に対して従動側回転体が当該カムトルクの偏り側へ付勢されることになる。
一方、特許文献2に開示の如く、通電制御回路部から電動アクチュエータへの通電制御に従って回転出力を発生させるような場合、内燃機関の始動時には、スタータの負荷が大きいことによって電源電圧が低下し易いため、当該電源電圧を受ける通電制御回路部が作動停止するおそれがある。また、特許文献2に開示の如く、クランク軸及びカム軸の回転角から駆動側及び従動側回転体間の相対位相を算出し、当該算出結果に基づいて電動アクチュエータへの通電を制御するような場合、内燃機関の始動時には、内燃機関の回転数が低いことよって相対位相の算出精度が低下するおそれもある。
これらのことから、従動側回転体がカムトルクの偏り側へ付勢される状況での始動時に、それら回転体間の相対位相を電気的に制御する場合には、始動位相に正確に保持することが困難であり、最悪、機関始動性を確保できないという事態が懸念されるのである。
本発明は、以上説明した問題に鑑みてなされたものであって、その目的は、内燃機関の運転状態に応じて適切なバルブタイミングを実現するバルブタイミング調整装置を提供することにある。
請求項1に記載の発明は、内燃機関においてクランク軸からのトルク伝達によりカム軸が開閉する吸気弁及び排気弁のうち少なくとも一方のバルブタイミングを調整するバルブタイミング調整装置において、クランク軸と連動して回転する駆動側回転体であって、駆動側ストッパ面を有する駆動側回転体と、カム軸と連動して回転し、付勢トルクにより駆動側回転体に対する遅角側又は進角側に偏って付勢される従動側回転体であって、駆動側ストッパ面と回転方向に当接することにより駆動側及び従動側回転体の間の相対位相(以下、「回転体間位相」という)の変化を規制し駆動側ストッパ面から回転方向に離間することにより回転体間位相の変化を許容する従動側ストッパ面を有する従動側回転体と、駆動側又は従動側回転体としての支持回転体により往復移動自在に支持され、従動側ストッパ面に対して付勢トルクの偏り側にある駆動側ストッパ面の当該従動側ストッパ面との間に突入する突入位置と、突入位置から抜出する抜出位置とが移動位置として設定されるピストン部材であって、作動流体の圧力により抜出位置側へ押圧されるピストン部材と、復原力によりピストン部材を突入位置側へ押圧する弾性部材と、内燃機関の始動に伴ってピストン部材への作動流体の供給を開始し、内燃機関の停止に伴ってピストン部材への作動流体の供給を停止する流体供給源と、を備えることを特徴とする。
このような請求項1に記載の発明によると、内燃機関の始動時には、当該始動に伴ってピストン部材への供給が開始される作動流体の圧力が低いため、弾性部材の復原力によってピストン部材を突入位置に保留可能となる。ここでピストン部材は、駆動側又は従動側回転体としての支持回転体に支持される形となっている。故に、従動側回転体が駆動側回転体に対して付勢トルクの偏り側に付勢される状況では、従動側ストッパ面及びそれよりも付勢トルクの偏り側にある駆動側ストッパ面の間にて保留されたピストン部材は、それらストッパ面のうち支持回転体と異なる回転体のストッパ面を係止することができる。これによれば、回転体間位相を中間位相に機械的に保持することができるので、内燃機関の始動に適切なバルブタイミングを実現する始動位相として、当該中間位相を正確に設定し、それによって機関始動性を確保することが可能となる。
また、請求項1に記載の発明によると、内燃機関の始動完了後においてピストン部材は、上昇した作動流体の圧力によって弾性部材の復原力に抗して押圧されることで、突入位置から抜出位置への移動が可能となる。故に、相互間からピストン部材の抜出した駆動側及び従動側ストッパ面同士は、当接によって回転体間位相を規制し、離間によって回転体間位相を許容することができる。したがって、バルブタイミングの調整範囲として、内燃機関の運転状態に適した範囲を確保することが可能となる。
以上、請求項1に記載の発明によれば、内燃機関の運転状態に応じて適切なバルブタイミングを実現することができるのである。
請求項2に記載の発明によると、従動側回転体を付勢する付勢トルクは、駆動側回転体に対する遅角側に平均的に偏るカムトルクである。これにより、内燃機関の始動時においては、カムトルクの平均トルクを受ける従動側回転体が遅角側に偏って付勢されることになるが、上述したピストン部材の働きにより回転体間位相を始動位相としての中間位相に機械的に保持できるので、機関始動性の確保が可能となる。
尚、付勢トルクとしては、駆動側回転体に対する遅角側に平均的に偏るカムトルク以外にも、例えばカムトルクの平均トルクに抗した復原力の印加によって、駆動側回転体に対する進角側に平均的に偏って従動側回転体を付勢するトルク等であってもよい。
請求項3に記載の発明によると、ピストン部材は、作動流体の閾値以上の圧力により弾性部材の復原力に抗して突入位置から抜出位置へ移動し、流体供給源は、内燃機関の始動時において閾値未満の圧力の作動流体をピストン部材へ供給し、内燃機関の始動完了後において閾値以上の圧力の作動流体をピストン部材へ供給する。これによれば、内燃機関の始動完了までは、作動流体の閾値未満の圧力によってピストン部材を突入位置に確実に保留させて、機関始動性を確保することができる。また、内燃機関の始動完了後においては、作動流体の閾値以上の圧力によってピストン部材を突入位置から抜出位置へ確実に移動させて、バルブタイミングの調整範囲を適切に確保することができる。
請求項4に記載の発明によると、流体供給源は、内燃機関の始動完了後の定常運転中においてピストン部材に対する作動流体の供給を継続する。これにより、内燃機関の始動完了後の定常運転中においては、ピストン部材が抜出位置に確実に保留されることになるので、バルブタイミングの調整範囲を継続して適切な範囲に保つことができる。
請求項5に記載の発明によると、ピストン部材は、支持回転体により径方向へ往復移動自在に支持され、抜出位置は、突入位置よりも当該径方向の外側に設定される。これにより、内燃機関の始動完了後の定常運転中においては、クランク軸又はカム軸と連動回転する支持回転体が支持するピストン部材は、突入位置よりも径方向外側の抜出位置に遠心力の作用によって保留可能となる。これによれば、バルブタイミングの調整範囲を継続して適切な範囲に保つことができるのである。
請求項6に記載の発明によると、ピストン部材は、突入位置において駆動側及び従動側ストッパ面の間に挟持される。これにより、内燃機関の始動時においては、駆動側及び従動側ストッパ面を回転方向の両側からピストン部材に当接させて、ピストン部材の移動方向に対する傾きを抑制することができる。したがって、支持回転体と異なる従動側又は駆動側回転体のストッパ面がピストン部材によって係止されるときの回転体間位相、即ち内燃機関の始動時に保持される位相については、ピストン部材の傾きに起因するずれが生じ難くなる。また、支持回転体に支持されるピストン部材が傾いて、作動ロックする事態の回避が可能となる。
請求項7に記載の発明は、通電により回転出力を発生する電動アクチュエータと、駆動側及び従動側回転体を有し、電動アクチュエータの回転出力に応じて回転体間位相を調整する位相調整機構と、電動アクチュエータへの通電を制御する通電制御回路部であって、内燃機関の始動時において電動アクチュエータへの通電をカットする通電制御回路部と、を備える。このような発明によると、内燃機関の始動完了までは、電動アクチュエータへの通電がカットされて、回転体間位相を決める回転出力の発生が停止することになる。しかしながら、上述したピストン部材の働きによれば、始動位相としての中間位相に回転体間位相を機械的に保持することができるので、機関始動性の確保が可能となるのである。
請求項8に記載の発明によると、内燃機関の始動位相に対して付勢トルクの偏り側とは反対側へずれた所定の回転体間位相が停止制御位相として定義され、通電制御回路部は、内燃機関の停止に必須の条件を検知してから内燃機関が完全停止するまでの期間において、電動アクチュエータへの通電を制御することにより回転体間位相を停止制御位相に保持した後、電動アクチュエータへの通電をカットする。これにより、内燃機関の完全停止前においては、始動位相に対して付勢トルクの偏り側とは反対側へずれた停止制御位相に回転体間位相が保持されることになるため、内燃機関の停止に伴って作動流体の供給が停止されるピストン部材は、弾性部材の復原力によって突入位置へと移動し得る。このようにして従動側及び駆動側ストッパ面間にピストン部材が突入した状態下、電動アクチュエータに対する通電がカットされると、従動側回転体が付勢トルクの偏り側に付勢されていることにより、支持回転体と異なる従動側又は駆動側回転体のストッパ面がピストン部材に係止されることになる。したがって、内燃機関の完全停止後においては、回転体間位相を機械的に保持して内燃機関の次の始動に必要な始動位相を確保することができるので、機関始動性の確保に貢献し得るのである。
ところで、内燃機関の回転数が低く、作動流体の温度が低い内燃機関の始動完了直後に内燃機関が停止されるような場合、作動流体の粘度が高いことにより、ピストン部材の突入位置への移動が遅れ、始動位相が実現されなくなることが懸念される。
そこで、請求項9に記載の発明によると、支持回転体と異なる従動側又は駆動側回転体としての係止回転体は、内燃機関の始動位相にて突入位置のピストン部材を係止することにより抜出位置側へのピストン部材の移動を規制し、通電制御回路部は、内燃機関の始動完了後に内燃機関の回転数が設定値に達するまでの期間において、電動アクチュエータへの通電を制御することにより回転体間位相を始動位相に保持する。このような発明では、内燃機関の始動完了後に内燃機関の回転数が設定値に達するまでは、回転体間位相が始動位相に保持される。これによれば、支持回転体と異なる従動側又は駆動側回転体としての係止回転体により突入位置のピストン部材が係止されて、当該ピストン部材の抜出位置側への移動が規制されることになる。したがって、内燃機関の回転数が低く、作動流体の温度が低い内燃機関の始動完了直後に内燃機関が停止されるようなことがあっても、ピストン部材を作動流体の粘度によらず突入位置に保留させて、始動位相を確実に実現することができるのである。
請求項10に記載の発明によると、係止回転体は、始動位相に対して付勢トルクの偏り側とは反対側へずれた回転体間位相にてピストン部材から離脱することによりピストン部材の移動を許容し、通電制御回路部は、内燃機関の始動完了後に内燃機関の回転数が設定値に達すると、電動アクチュエータへの通電を制御することにより回転体間位相を始動位相から付勢トルクの偏り側と反対側へ変化させる。これによれば、始動完了後において内燃機関の回転数が設定値に達すると、回転体間位相が始動位相から付勢トルクの偏り側と反対側へ変化して、係止回転体がピストン部材から離脱することになる。したがって、内燃機関の回転数が上昇して、ピストン部材の移動遅れを生じさせない程度にまで作動流体温度が上昇した場合には、作動流体の圧力によってピストン部材を抜出位置まで移動させて、バルブタイミングの調整範囲を適切に確保することができるのである。
請求項11に記載の発明によると、ピストン部材は、係止回転体のストッパ面である従動側又は駆動側ストッパ面に突入位置において当接する当接面と、当該当接面に対して凹む凹部とを有し、係止回転体は、係止回転体のストッパ面である従動側又は駆動側ストッパ面から突出し突入位置のピストン部材の凹部に突入する凸部を有する。これによれば、係止回転体のストッパ面である従動側又は駆動側ストッパ面から突出する凸部は、ピストン部材の当接面に対して凹む凹部に突入することで、突入位置のピストン部材を係止して、当該ピストン部材の抜出位置側への移動を確実に規制することができる。したがって、内燃機関の始動時や始動直後の低回転数時等、ピストン部材を突入位置に保留させることが要求されるような状況では、その要求に適確に応えることができるのである。
尚、以上において「内燃機関の始動時」とは、スタータの補助により内燃機関がクランキングされているときを意味し、また「内燃機関の始動完了」とは、内燃機関が完爆してスタータの補助なく継続回転可能となったことを意味する。
以下、本発明の複数の実施形態を図面に基づいて説明する。尚、各実施形態において対応する構成要素には同一の符号を付すことにより、重複する説明を省略する。
(第一実施形態)
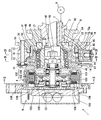
図1は、本発明の第一実施形態によるバルブタイミング調整装置1を示している。バルブタイミング調整装置1は、内燃機関のクランク軸(図示しない)からカム軸2へ機関トルクを伝達する伝達系に設けられている。尚、本実施形態においてカム軸2は内燃機関の吸気弁(図示しない)を開閉するものであり、バルブタイミング調整装置1は当該吸気弁のバルブタイミングを調整する。
図1は、本発明の第一実施形態によるバルブタイミング調整装置1を示している。バルブタイミング調整装置1は、内燃機関のクランク軸(図示しない)からカム軸2へ機関トルクを伝達する伝達系に設けられている。尚、本実施形態においてカム軸2は内燃機関の吸気弁(図示しない)を開閉するものであり、バルブタイミング調整装置1は当該吸気弁のバルブタイミングを調整する。
図1に示すようにバルブタイミング調整装置1は、電動モータ4、通電制御回路部6及び位相調整機構8等を組み合わせてなる。
電動モータ4は、図1,2に示すようにブラシレスモータであり、モータケース100、軸受101、モータ軸102及びモータステータ103を備えている。モータケース100は、内燃機関の固定節(例えばチェーンケース)に取り付けられる。中空のモータケース100内には、二つの軸受101及びモータステータ103が収容固定されている。各軸受101は、モータ軸102の軸本体104を回転自在に支持している。モータ軸102においてロータ部105は、軸本体104から外周側へ突出する円環板状に磁性材によって形成されている。このロータ部105には、モータ軸102の回転方向に等間隔に並ぶ形態で複数の永久磁石106が設けられている。これにより各永久磁石106は、モータ軸102と共に正逆回転可能となっている。回転方向において隣り合う永久磁石106同士は、互いに逆極性の磁極をロータ部105の外周側に形成している。モータステータ103はロータ部105の外周側に同心上に配置されており、モータコア108及びモータコイル109を有している。モータコア108は金属片を積層して形成され、モータ軸102の回転方向に等間隔に複数設けられている。モータコイル109は、各モータコア108に個別に巻装されてなる。
通電制御回路部6は、例えば制御コンピュータ及び通電ドライバ等からなり、少なくとも一部がモータケース100内に収容固定されている。通電制御回路部6は電動モータ4の各モータコイル109に電気的に接続され、それらモータコイル109に対する通電を内燃機関の運転状態に応じて制御する。この通電制御を受けて電動モータ4は、各永久磁石106に作用する磁界を各モータコイル109の励磁により形成して制御トルクをモータ軸102に発生させることにより、モータ軸102を図2の時計方向又は反時計方向へ回転駆動する。尚、各モータコイル109に対する通電が通電制御回路部6によってカットされるときには、それらモータコイル109の形成する磁界が消失するので、制御トルクの発生は停止することになる。
図1に示すように位相調整機構8は、駆動側回転体10、従動側回転体20、遊星キャリア40及び遊星歯車50を備えている。
図1,3,4に示すように、駆動側回転体10は全体として筒状を呈しており、位相調整機構8の他の構成要素20,40,50を内部に収容している。駆動側回転体10は、歯車部材12及びスプロケット13間に周壁部材16を同軸上に共締めしてなる。
歯車部材12は、歯底円の内周側に歯先円を有する駆動側内歯車部14を形成している。スプロケット13は、径方向外側へ突出する歯19を回転方向に複数形成している。スプロケット13は、それらの歯19とクランク軸の複数の歯との間で環状のタイミングチェーンが掛け渡されることにより、クランク軸と連繋する。したがって、クランク軸から出力された機関トルクがタイミングチェーンを通じてスプロケット13へ入力されるときには、駆動側回転体10はクランク軸と連動して回転する。このとき駆動側回転体10の回転方向は、図3,4の時計方向となる。
図1,4に示すように、従動側回転体20は有底円筒状を呈し、駆動側回転体10の内周側に同心上に嵌合している。従動側回転体20の底壁部は、螺子止めによってカム軸2に同軸上に連結される連結部21を形成している。この連結により従動側回転体20は、カム軸2と連動して回転可能となっており、また駆動側回転体10に対して進角側X及び遅角側Yに相対回転可能となっている。
従動側回転体20の周壁部は、歯底円の内周側に歯先円を有する従動側内歯車部22を形成している。ここで、従動側内歯車部22の内径は駆動側内歯車部14の内径よりも小さく設定され、また従動側内歯車部22の歯数は駆動側内歯車部14の歯数よりも少なく設定されている。従動側内歯車部22は、駆動側内歯車部14に対して軸方向へずれて配置されている。
図1,3,4に示すように、遊星キャリア40は全体として筒状を呈しており、内周面部によって入力部41を形成している。入力部41は、回転体10,20及びモータ軸102に対して同心上に配置されている。入力部41には、継手43が嵌合する嵌合溝42が形成され、当該継手43を介してモータ軸102の軸本体104が遊星キャリア40に連結されている。これにより遊星キャリア40は、駆動トルクの発生に応じてモータ軸102と共に回転可能となっており、また駆動側内歯車部14に対して進角側X及び遅角側Yに相対回転可能となっている。
遊星キャリア40はさらに、入力部41に対して偏心する外周面部によって偏心部44を形成している。偏心部44は、遊星歯車50の中心孔51の内周側にベアリング45を介して嵌合している。これにより遊星歯車50は、駆動側内歯車部14に対する遊星キャリア40の相対回転に応じて遊星運動可能に、偏心部44によって支持されている。ここで遊星運動とは、遊星歯車50が偏心部44の偏心中心線周りに自転しつつ、遊星キャリア40の回転方向へ公転する遊星運動をいう。
遊星歯車50は段付円筒状に形成され、歯底円の外周側に歯先円を有する駆動側外歯車部52及び従動側外歯車部54をそれぞれ大径部分及び小径部分によって形成している。駆動側外歯車部52及び従動側外歯車部54の歯数は、それぞれ駆動側内歯車部14及び従動側内歯車部22の歯数よりも同数ずつ少なくなるように設定されている。駆動側外歯車部52は駆動側内歯車部14の内周側に配置されて、当該歯車部14と噛み合っている。また、駆動側外歯車部52よりも連結部21側の従動側外歯車部54は従動側内歯車部22の内周側に配置されて、当該歯車部22と噛み合っている。
このように回転体10,20間を歯車連繋してなる位相調整機構8は、カム軸2に発生するカムトルクをモータ軸102へ伝達しつつ、駆動側及び従動側回転体10,20間の相対位相である回転体間位相をモータ軸102の回転出力に応じて調整することとなる。
具体的には、モータ軸102が駆動側回転体10と同速回転することにより、遊星キャリア40が駆動側内歯車部14に対して相対回転しないときには、遊星歯車50が遊星運動しないで、回転体10,20と一体に回転する。即ち、回転体間位相は変化しないので、それに合わせてバルブタイミングが保持されることになる。
一方、モータ軸102が駆動側回転体10に対して高速回転することにより、遊星キャリア40が駆動側内歯車部14に対して進角側Xへ相対回転するときには、遊星歯車50の遊星運動により、従動側回転体20が駆動側回転体10に対する進角側Xへ相対回転する。即ち、回転体間位相が進角側Xへ変化するので、それに合わせてバルブタイミングが進角することになる。
また一方、モータ軸102が駆動側回転体10に対して低速回転又は逆回転することにより、遊星キャリア40が駆動側内歯車部14に対して遅角側Yへ相対回転するときには、遊星歯車50の遊星運動により、従動側回転体20が駆動側回転体10に対して遅角側Yへ相対回転する。即ち、回転体間位相が遅角側Yへ変化するので、それに合わせてバルブタイミングが遅角することになる。
以上、第一実施形態の基本的構成について説明した。以下、第一実施形態の特徴的構成について説明する。
(カムトルク)
図5は、内燃機関の運転中に吸気弁の駆動反力によってカム軸2に発生し、当該カム軸2から従動側回転体20に作用するカムトルクの時間的変化を示している。カムトルクは、従動側回転体20を駆動側回転体10に対する遅角側Yへ付勢する正トルクと、従動側回転体20を駆動側回転体10に対する進角側Xへ付勢する負トルクとに、カム軸2の回転に応じて交番する。ここでカムトルクは、カム軸2を支持する軸受(図示しない)のフリクション等に起因して、正トルクの最大値T+が負トルクの最大値T−よりも大きい傾向を示しており、それによってカムトルクの平均トルク(以下、「平均カムトルク」という)Taveが正トルク側、即ち遅角側Yに偏っている。以上より、本実施形態のカムトルクは、平均的に遅角側Yに偏って従動側回転体20を付勢する「付勢トルク」として、当該回転体20に作用することとなる。
図5は、内燃機関の運転中に吸気弁の駆動反力によってカム軸2に発生し、当該カム軸2から従動側回転体20に作用するカムトルクの時間的変化を示している。カムトルクは、従動側回転体20を駆動側回転体10に対する遅角側Yへ付勢する正トルクと、従動側回転体20を駆動側回転体10に対する進角側Xへ付勢する負トルクとに、カム軸2の回転に応じて交番する。ここでカムトルクは、カム軸2を支持する軸受(図示しない)のフリクション等に起因して、正トルクの最大値T+が負トルクの最大値T−よりも大きい傾向を示しており、それによってカムトルクの平均トルク(以下、「平均カムトルク」という)Taveが正トルク側、即ち遅角側Yに偏っている。以上より、本実施形態のカムトルクは、平均的に遅角側Yに偏って従動側回転体20を付勢する「付勢トルク」として、当該回転体20に作用することとなる。
(ストッパ構造)
図1,4に示すように、駆動側回転体10の周壁部材16は、内周面に開口する複数のストッパ溝70,71,72を回転方向に間隔をあけて形成している。また、従動側回転体20は、従動側内歯車部22の径方向外側へ突出する複数のストッパ突起73,74,75を回転方向に間隔をあけて形成している。各ストッパ突起73,74,75は、駆動側回転体10内においてストッパ溝70,71,72にそれぞれ挿入されており、回転体10,20の回転方向に揺動可能となっている。そして、本実施形態では、ストッパ突起73のストッパ面73a,73bと、ストッパ溝70のストッパ面70a,70bとが回転方向に当接することにより、回転体間位相の変化が規制されるようになっている。
図1,4に示すように、駆動側回転体10の周壁部材16は、内周面に開口する複数のストッパ溝70,71,72を回転方向に間隔をあけて形成している。また、従動側回転体20は、従動側内歯車部22の径方向外側へ突出する複数のストッパ突起73,74,75を回転方向に間隔をあけて形成している。各ストッパ突起73,74,75は、駆動側回転体10内においてストッパ溝70,71,72にそれぞれ挿入されており、回転体10,20の回転方向に揺動可能となっている。そして、本実施形態では、ストッパ突起73のストッパ面73a,73bと、ストッパ溝70のストッパ面70a,70bとが回転方向に当接することにより、回転体間位相の変化が規制されるようになっている。
具体的には、ストッパ面73aよりも平均カムトルクTaveの偏り側Yにあるストッパ面70aに対して、当該ストッパ面73aが図6の如く当接するときには、駆動側回転体10に対する遅角側Yへの従動側回転体20の相対回転が規制される。したがって、このときの回転体間位相は、駆動側回転体10に対する従動側回転体20の最遅角位相となる。
一方、ストッパ面73bよりも平均カムトルクTaveの偏り側Yと反対側Xにあるストッパ面70bに対して、当該ストッパ面73bが図7の如く当接するときには、駆動側回転体10に対する進角側Xへの従動側回転体20の相対回転が規制される。したがって、このときの回転体間位相は、駆動側回転体10に対する従動側回転体20の最進角位相となる。
尚、図4に示すように、ストッパ面73aとストッパ面70aとが回転方向に離間し且つストッパ面73bとストッパ面70bとが回転方向に離間するときには、回転体間位相の変化が許容され得る。また、ストッパ突起74及びストッパ溝71の組と、ストッパ突起75及びストッパ溝72の組とについては、万が一、ストッパ突起73及びストッパ溝70の組に異常が生じたときに、それらストッパ突起73及びストッパ溝70の組に代わって回転間位相変化の規制作用を発揮し得るように、予備的に設けられている。
(ピストン構造)
図1,4に示すように駆動側回転体10には、金属製の周壁部材16を径方向に貫通する支持孔80が形成されている。段付円筒孔状の支持孔80は、図8に示すように、小径側の連通孔部80aと大径側のシリンダ孔部80bとを同軸上に有している。
図1,4に示すように駆動側回転体10には、金属製の周壁部材16を径方向に貫通する支持孔80が形成されている。段付円筒孔状の支持孔80は、図8に示すように、小径側の連通孔部80aと大径側のシリンダ孔部80bとを同軸上に有している。
連通孔部80aは、周壁部材16の径方向においてストッパ溝70の外側に設けられ、ストッパ溝70と連通している。ここで、ストッパ溝70における連通孔部80aの開口部は、ストッパ溝70が形成するストッパ面70aに対して、ストッパ溝70に挿入されたストッパ突起73のストッパ面73a側に隣接している。
シリンダ孔部80bは、周壁部材16の径方向において連通孔部80aの外側に設けられている。シリンダ孔部80bにおいて連通孔部80aと反対側の端部は、周壁部材16に嵌合固定されて駆動側回転体10の一部をなすリテーナ81により、覆蓋されている。
図1,4に示すように支持孔80には、金属製のピストン部材82が周壁部材16の径方向に往復移動自在に支持されている。ピストン部材82は、図8に示すように、円柱ロッド状の突入部82aと有底円筒状の作用部82bとを同軸上に有している。
突入部82aは、支持孔80の連通孔部80aに同心上に嵌通されている。これにより、ストッパ面73aに対してストッパ面70aが平均カムトルクTaveの偏り側Yに離間しているときには、それらストッパ面70a,73aの間に突入部82aが図9,10の如く突入可能となっている。また特に、ストッパ面70aのストッパ面73a側に連通孔部80aが隣接開口する本実施形態では、図9の如き突入状態の突入部82aがストッパ面70a,73a間に挟持されることで、駆動側回転体10に対する従動側回転体20の遅角側Yへの相対回転が規制される。したがって、突入部82aがストッパ面70a,73a間に挟持されるときには、回転体間位相が最遅角位相よりも進角側X且つ最進角位相よりも遅角側Yの中間位相となるのであり、本実施形態において当該中間位相が、内燃機関の始動に最適な始動位相Psとして採用されている。以上、本実施形態では、突入部82aをストッパ面70a,73a間に突入させるピストン部材82の移動位置が、「突入位置」に設定されている。
突入部82aについてはさらに、図8の如くストッパ面70a,73a間から抜出した状態を実現可能となっている。そこで、本実施形態では、突入部82aをストッパ面70a,73a間から抜出させるピストン部材82の移動位置が、「抜出位置」に設定されている。また特に、周壁部材16の径方向において連通孔部80aがストッパ溝70の外側に設けられている本実施形態では、当該径方向において「抜出位置」が「突入位置」よりも外側に設定された形となっている。
図8に示すように作用部82bは、シリンダ孔部80bのリテーナ81よりも連通孔部80a側に同心上に収容されており、突入部82aと反対側の開口部をリテーナ81側に向けている。これにより作用部82bは、周壁部材16の径方向において突入部82aの外側に配置されており、シリンダ孔部80bの連通孔部80a側端部との間にピストン室83を形成している。ここでピストン室83には、後に詳述するように作動流体が供給されるようになっており、当該作動流体の圧力が作用部82bに作用する。
シリンダ孔部80bにおいて作用部82b及びリテーナ81の間には、弾性部材84が介装されている。弾性部材84は、本実施形態では金属製の圧縮コイルスプリングであり、その両端部が作用部82b及びリテーナ81によって係止されている。弾性部材84は圧縮方向に弾性変形して復原力を発生し、作用部82bに対して当該復原力をピストン室83と反対側から作用させる。
したがって、弾性部材84の復原力により作用部82bに働く軸力が、ピストン室83の作動流体の圧力により作用部82bに働く軸力よりも大きくなるときには、前者の軸力が支配的になるので、ピストン部材82が突入位置側へと押圧されることになる。一方、弾性部材84の復原力により作用部82bに働く軸力に比して、ピストン室83の作動流体の圧力により作用部82bに働く軸力が大きくなるときには、後者の軸力が支配的になるので、ピストン部材82が抜出位置側へと押圧されることになる。
図1に示すように駆動側回転体10には、ピストン部材82へ作動流体を供給するための供給孔85,86が設けられている。
金属製のスプロケット13を軸方向に対して斜めに貫通する供給孔85は、回転体間位相によらず、カム軸2の供給孔3と連通するようになっている。ここで供給孔3は、作動流体として内燃機関用の潤滑油がポンプ9から供給される通路であり、また当該ポンプ9は、内燃機関が出力する機関トルクによって機械的に駆動されるメカポンプである。
周壁部材16を軸方向に沿って延伸する供給孔86の一端部は、図1に示すようにスプロケット13側の供給孔85と連通し、また当該供給孔86の他端部は、図8〜10に示すようにシリンダ孔部80bと作用部82bとの間のピストン室83に連通している。以上の構成によりピストン室83には、供給孔3,85,86を通じたポンプ9からの作動流体供給が内燃機関の始動に伴って開始されるようになっている。また、ポンプ9からピストン室83への作動流体供給は、内燃機関の始動完了後の定常運転中は継続され、内燃機関の停止に伴って停止するようになっている。
尚、本実施形態において従動側回転体20の連結部21には、図1,4に示すように、作動流体を駆動側回転体10内へ導入するために供給孔3と連通する導入孔90が、回転方向に二つ設けられている。これにより、各導入孔90を通じて駆動側回転体10内に導入された作動流体は、位相調整機構8に対する潤滑油として機能することになる。また、このように作動流体を導入する本実施形態では、駆動側回転体10内のストッパ溝70に開口する支持孔80から当該回転体10内へ作動流体が漏出したとしても、漏出流体を位相調整機構8に対する潤滑油として利用することが可能となる。
以上、第一実施形態の特徴的構成について説明した。以下、第一実施形態の特徴的作動について説明する。
(内燃機関の停止時)
内燃機関の停止前の定常運転中は、内燃機関の回転数が所定のアイドル回転数Ri以上となることにより、ポンプ9からピストン室83へ継続供給される作動流体の圧力が所定の閾値F以上となる。その結果、ピストン部材82については、作動流体の圧力による軸力が支配的になると共に、当該部材82を支持する駆動側回転体10と一体回転することによって生じる遠心力が作用することで、図8の如く弾性部材84の復原力に抗して抜出位置に保留される。
内燃機関の停止前の定常運転中は、内燃機関の回転数が所定のアイドル回転数Ri以上となることにより、ポンプ9からピストン室83へ継続供給される作動流体の圧力が所定の閾値F以上となる。その結果、ピストン部材82については、作動流体の圧力による軸力が支配的になると共に、当該部材82を支持する駆動側回転体10と一体回転することによって生じる遠心力が作用することで、図8の如く弾性部材84の復原力に抗して抜出位置に保留される。
そして、イグニッションスイッチのオフ指令等の停止指令を定常運転中の内燃機関が受けたときには、通電制御回路部6が当該停止指令を検知して停止処理を開始する。
具体的に停止処理では、まず、電動モータ4の各モータコイル109への通電を制御することにより、回転体間位相を停止制御位相Pcに保持する。ここで停止制御位相Pcは、始動位相Psに対して平均カムトルクTaveの偏り側Yとは反対側Xにずれた中間位相に設定される。
停止制御位相Pcの保持状態下、慣性回転状態にある内燃機関の回転数がアイドル回転数Riよりも低下すると、ポンプ9からピストン室83へと供給される作動流体の圧力が閾値F未満となる。その結果、ピストン部材82については、弾性部材84の復原力による軸力が支配的となるため、図10の如く突入位置へと移動して、ストッパ溝70のストッパ面70aに当接且つストッパ突起73のストッパ面73aから離間した状態となる。
そこで、停止処理では、停止制御位相Pcの保持状態下において内燃機関の回転数がアイドル回転数Riよりも低い制御切換値Rc(例えば200rpm)に達すると、各モータコイル109への通電をカットしてモータ軸102の回転を停止させる。ここで、通電カット時点においてはカム軸2が未だ慣性回転状態にあるため、ピストン部材82が突入位置に保留された状態下、従動側回転体20が平均カムトルクTaveの偏り側Yに付勢されて、回転体間位相が停止制御位相Pcよりも遅角側Yへと変化する。
以上の結果、回転体間位相が停止制御位相Pcよりも遅角側Yの始動位相Psまで変化すると、突入位置に保留されたピストン部材82の突入部82aによりストッパ面73aが図9の如く係止されて、当該突入部82aがストッパ面70a,73a間に挟持された状態となる。したがって、この後に完全停止する内燃機関においては、次の始動までの間、ストッパ面70a,73a間に突入部82aが挟持された状態を機械的に維持して、回転体間位相を始動位相Psに確実に保持し得るのである。
(内燃機関の始動時)
完全停止状態の内燃機関がイグニッションスイッチのオン指令等の始動指令を受けたときには、通電制御回路部6が当該始動指令を検知して始動処理を開始する。
完全停止状態の内燃機関がイグニッションスイッチのオン指令等の始動指令を受けたときには、通電制御回路部6が当該始動指令を検知して始動処理を開始する。
具体的に始動処理では、各モータコイル109への通電をカットした状態で、内燃機関が完爆するのを待つ。このとき、内燃機関の回転数はアイドル回転数Riよりも低いため、ポンプ9からピストン室83へ供給される作動流体の圧力は閾値F未満となる。故に、弾性部材84の復原力による軸力が支配的となるピストン部材82については、図9の如く突入位置に保留されることになる。またこのときには、カム軸2の回転に伴って従動側回転体20が平均カムトルクTaveの偏り側Yに付勢されるため、ピストン部材82の突入部82aは、突入位置にてストッパ面70a,73a間に挟持されたまま、ストッパ面73aの係止状態を維持することになる。
以上の結果、内燃機関の始動時には、ストッパ面70a,73a間においてピストン部材82の傾きが機械的に抑制されて、回転間位相が始動位相Psに正確に保持されることになる。したがって、本実施形態によれば、内燃機関の始動に適切なバルブタイミングを実現して、機関始動性を確保することができるのである。
(内燃機関の始動完了後)
内燃機関の始動が完了して、内燃機関の回転数がアイドル回転数Ri以上になると、ポンプ9からピストン室83へと供給される作動流体の圧力が閾値F以上になる。その結果、作動流体の圧力による軸力が支配的になると共に遠心力が作用するピストン部材82については、図8の如く弾性部材84の復原力に抗して抜出位置に移動することで、最遅角位相及び最進角位相間の全域における位相変化を許容することとなる。したがって、この後においては、通電制御回路部6が各モータコイル109への通電を制御することで、回転体間位相を最遅角位相及び最進角位相間の全域にて、即ち内燃機関の運転状態に適した範囲にて調整することができるのである。
内燃機関の始動が完了して、内燃機関の回転数がアイドル回転数Ri以上になると、ポンプ9からピストン室83へと供給される作動流体の圧力が閾値F以上になる。その結果、作動流体の圧力による軸力が支配的になると共に遠心力が作用するピストン部材82については、図8の如く弾性部材84の復原力に抗して抜出位置に移動することで、最遅角位相及び最進角位相間の全域における位相変化を許容することとなる。したがって、この後においては、通電制御回路部6が各モータコイル109への通電を制御することで、回転体間位相を最遅角位相及び最進角位相間の全域にて、即ち内燃機関の運転状態に適した範囲にて調整することができるのである。
以上説明した第一実施形態によれば、内燃機関の始動完了後の定常運転時のみならず、内燃機関の停止時及び始動時にも適切なバルブタイミングを実現して、燃費性や始動性等といった機関性能を確保することができるのである。
尚、ここまでの第一実施形態では、駆動側回転体10が特許請求の範囲に記載の「支持回転体」に相当し、ポンプ9が特許請求の範囲に記載の「流体供給源」に相当し、電動モータ4が特許請求の範囲に記載の「電動アクチュエータ」に相当している。
(第二実施形態)
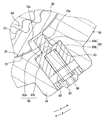
図11に示すように本発明の第二実施形態は、上述した第一実施形態の変形例である。
図11に示すように本発明の第二実施形態は、上述した第一実施形態の変形例である。
第二実施形態において、駆動側回転体10のストッパ溝70に挿入される従動側回転体220のストッパ突起273には、凸部278が形成されている。この凸部278は、ストッパ溝70のストッパ面70aと組をなすストッパ突起273のストッパ面273aから当該ストッパ面70a側へ、即ち平均カムトルクTaveの偏り側Yへ突出している。ここで、ストッパ面273aにおける凸部278の形成箇所は、本実施形態ではストッパ突起273の突出側先端部に設定されている。
また、第二実施形態において、駆動側回転体10の支持孔80に支持されるピストン部材282の突入部282aには、凹部288が形成されている。この凹部288は、円柱ロッド状の突入部282aの周方向に連続して延びる円環溝状を呈しており、当該突入部282aの外周面289に対して凹んだ形となっている。ここで、外周面289における凹部288の形成箇所は、本実施形態では、図11に示す突入位置の突入部282aにおいてストッパ面70a,273a間に露出する部分のうち、凸部278の突出側となる箇所に設定されている。
以上の構成により第二実施形態では、突入位置の突入部282aの外周面289にストッパ面273a,70aが図11の如く共に当接する始動位相Psにて、凸部278が凹部288に突入する状態となる。この状態においては、弾性部材84の復原力による軸力に比して、ピストン室83へ供給される作動流体の圧力による軸力が大きくなったとしても、凹部288が凸部278によって係止されることで、ピストン部材282の抜出位置側への移動が規制されるのである。
また、図12に示すように第二実施形態では、始動位相Psから平均カムトルクTaveの偏り側Yと反対側Xにずれた中間位相Pmにて、突入位置の突入部282aの外周面289からストッパ面273aが離間し、凹部288から凸部278が離脱した状態となる。この状態となることによりピストン部材282は、抜出位置側への移動を許容されるので、弾性部材84の復原力による軸力に比して作動流体圧力による軸力が大きくなると、図13の如くピストン部材282が抜出位置に移動することとなる。
このような第二実施形態において内燃機関の停止時に実行される停止処理では、上記中間位相Pmと同じ又は上記中間位相Pmに対して平均カムトルクTaveの偏り側Yとは反対側Xにずれた位相に、停止制御位相Pcを制御する。これにより、停止制御位相Pcの保持状態下、内燃機関の回転数が制御切換値Rcに達するまでの期間においては、ピストン部材282が凸部278の干渉を受けることなく突入位置に移動して、当該突入位置に保留される。さらに、内燃機関の回転数が制御切換値Rcに達して各モータコイル109への通電がカットされた後においては、平均カムトルクTaveの偏り側Yに付勢される従動側回転体220のストッパ面273aが凸部278を凹部288に進入させつつ、突入部282aと当接して係止される。したがって、内燃機関が完全停止するまでの間に回転体間位相が停止制御位相Pcよりも遅角側Yの始動位相Psへと変化し、当該完全停止後においては、始動位相Psが確実に保持されることとなる。
また、第二実施形態において内燃機関の始動時に実行される始動処理では、第一実施形態と同様の処理内容により、ピストン部材282を突入位置に保留させて回転間位相を始動位相Psに保持する。また、特に第二実施形態の場合、ピストン室83へ供給される作動流体の圧力が偶発的に閾値F以上になったとしても、凸部278による凹部288の係止作用によってピストン部材282の抜出位置への移動が規制されるので、始動位相Psの保持性が高められるのである。
さらにまた、第二実施形態において内燃機関の始動が完了すると、直ちに通電制御回路部6がフェイル対策処理を開始する。
具体的にフェイル対策処理では、内燃機関の回転数がアイドル回転数Ri以上の設定値Rsに達するまでの期間において、各モータコイル109への通電を制御して回転体間位相を始動位相Psに保持する。その結果、ポンプ9から供給される作動流体の温度が内燃機関の回転数と共に上昇するまでの間は、凸部278による凹部288の係止状態が維持されて、ピストン部材282の抜出位置への移動が確実に規制される。これによると、内燃機関の始動完了直後に停止指令が出されて通電制御回路部6が停止処理を開始するような場合には、低温状態にある作動流体の粘度が高いことに起因して、内燃機関の回転数が制御切換値Rcに達するまでにピストン部材282が突入位置に戻らなくなる事態を、回避できるのである。
ここで、ピストン部材282が突入位置に戻らない場合、平均カムトルクTaveの偏り側Yに付勢される従動側回転体220は、ストッパ面273aがストッパ面70aと当接するまで駆動側回転体10に対する相対回転を継続し、始動位相Psからのずれを惹起するおそれがある。しかし、ピストン部材282が突入位置に戻らなくなる事態を回避し得る本実施形態によれば、内燃機関の停止時及び始動時における始動位相Psからのずれを阻止して、機関始動性の確保要求に十分応えることができるのである。
尚、設定値Rsについては、内燃機関の始動完了後において作動流体の温度が上昇することにより、ピストン部材282の突入位置への戻りを阻害しない程度の粘度を、作動流体に付与可能な回転数に設定される。
さて、フェイル対策処理では、内燃機関の回転数が設定値Rsに達すると、各モータコイル109への通電制御により、回転体間位相を平均カムトルクTaveの偏り側Yとは反対側Xに変化させて、中間位相Pmを実現する。ここで、内燃機関の回転数が設定値Rsに達したときには、作動流体の圧力が閾値F以上となるので、中間位相Pmの実現によって凹部288から凸部278が離脱したピストン部材282は、即座に抜出位置へと移動する。したがって、この後においては、バルブタイミングの調整範囲が適切に確保されることとなる。
以上、第二実施形態によれば、内燃機関の停止時に懸念されるフェイルを防止して、信頼性の高い機関始動性を確保することができるのである。
尚、ここまでの第二実施形態では、従動側回転体220が特許請求の範囲に記載の「係止回転体」に相当し、突入部282aの外周面289が特許請求の範囲に記載の「当接面」に相当している。
(他の実施形態)
以上、本発明の複数の実施形態について説明したが、本発明はそれらの実施形態に限定して解釈されるものではなく、その要旨を逸脱しない範囲内において種々の実施形態に適用することができる。
以上、本発明の複数の実施形態について説明したが、本発明はそれらの実施形態に限定して解釈されるものではなく、その要旨を逸脱しない範囲内において種々の実施形態に適用することができる。
具体的には、図14(同図は第一実施形態の変形例)に示すように、回転体10を軸方向に貫通する支持孔80を設けて、当該支持孔80によってピストン部材82,282を回転体10の軸方向に往復移動自在に支持するようにしてもよい。尚、図14に示す変形例では、周壁部材16を介さずに歯車部材12及びスプロケット13を直接共締めすることによって駆動側回転体10を形成しており、支持孔80及びそれに連通する供給孔86がスプロケット13に設けられている。
また、支持孔80については、回転体20,220に設けることで、ピストン部材82,282を当該回転体20,220によって支持するようにしてもよい。さらに、支持孔80については、当該支持孔80を形成する回転体10のストッパ面70aから離間する箇所に開口させることにより、突入位置におけるピストン部材82,282の突入部82a,282aからストッパ面70aを離間させるようにしてもよい。またさらに、支持孔80内のピストン室83を通じてピストン部材82,282に与えられる作動流体については、内燃機関の潤滑油以外であってもよい。
位相調整機構8については、平均カムトルクTaveに抗した復原力をスプリング等により回転体20,220へ印加することによって、回転体10に対する進角側Xに平均的に偏って回転体20,220を付勢する構成としてもよい。また、位相調整機構8については、回転体10がカム軸2と連動回転し、回転体20,220がクランク軸と連動回転する構成としてもよい。そして、これら位相調整機構8の変形構成等、回転体10に対する進角側Xに偏って付勢トルクが回転体20,220に作用する構成又は回転体20,220に対する遅角側Yに偏って付勢トルクが回転体10に作用する構成においては、ピストン部材82,282をストッパ面70b,73b間に突入させるようにしてもよい。
位相調整機構8についてはさらに、遊星歯車50に噛合する歯車部14,22を回転体10と回転体20,220との双方に設ける構成以外にも、本発明の作用効果が得られる構成であれば、適宜な構成のものを採用することができる。
「電動アクチュエータ」としては、電動モータ以外にも、例えば電磁式ブレーキ又は流体式ブレーキ等の電動ブレーキや、油圧モータを使用してもよい。また、「流体供給源」としては、内燃機関の機関トルクによって駆動されるメカポンプ以外にも、内燃機関の運転に伴う通電によって作動する電動ポンプを使用してもよい。さらにまた、「内燃機関の停止に必須の条件」としては、内燃機関が停止する際に必ず現出する条件であれば、例えば内燃機関のアイドル回転数等を採用してもよい。
そして、本発明は、吸気弁のバルブタイミングを調整する装置以外にも、排気弁のバルブタイミングを調整する装置や、吸気弁及び排気弁の双方のバルブタイミングを調整する装置にも適用することができる。
1 バルブタイミング調整装置、2 カム軸、3 供給孔、4 電動モータ(電動アクチュエータ)、6 通電制御回路部、8 位相調整機構、9 ポンプ(流体供給源)、10 駆動側回転体(支持回転体)、12 歯車部材、13 スプロケット、14 駆動側内歯車部、16 周壁部材、20 従動側回転体、22 従動側内歯車部、40 遊星キャリア、50 遊星歯車、52 駆動側外歯車部、54 従動側外歯車部、70,71,72 ストッパ溝、70a,70b ストッパ面、73,74,75,273 ストッパ突起、73a,73b,273a ストッパ面、80 支持孔、80a 連通孔部、80b シリンダ孔部、81 リテーナ、82,282 ピストン部材、82a,282a 突入部、82b 作用部、83 ピストン室、84 弾性部材、85,86 供給孔、90 導入孔、102 モータ軸、109 モータコイル、220 従動側回転体(係止回転体)、278 凸部、288 凹部、289 外周面(当接面)、F 閾値、Pc 停止制御位相、Pm 中間位相、Ps 始動位相、Rc 制御切換値、Ri アイドル回転数、Rs 設定値、Tave 平均カムトルク
Claims (11)
- 内燃機関においてクランク軸からのトルク伝達によりカム軸が開閉する吸気弁及び排気弁のうち少なくとも一方のバルブタイミングを調整するバルブタイミング調整装置において、
前記クランク軸と連動して回転する駆動側回転体であって、駆動側ストッパ面を有する駆動側回転体と、
前記カム軸と連動して回転し、付勢トルクにより前記駆動側回転体に対する遅角側又は進角側に偏って付勢される従動側回転体であって、前記駆動側ストッパ面と回転方向に当接することにより前記駆動側回転体及び前記従動側回転体の間の相対位相の変化を規制し前記駆動側ストッパ面から回転方向に離間することにより前記相対位相の変化を許容する従動側ストッパ面を有する従動側回転体と、
前記駆動側回転体又は前記従動側回転体としての支持回転体により往復移動自在に支持され、前記従動側ストッパ面に対して前記付勢トルクの偏り側にある前記駆動側ストッパ面の当該従動側ストッパ面との間に突入する突入位置と、前記突入位置から抜出する抜出位置とが移動位置として設定されるピストン部材であって、作動流体の圧力により前記抜出位置側へ押圧されるピストン部材と、
復原力により前記ピストン部材を前記突入位置側へ押圧する弾性部材と、
前記内燃機関の始動に伴って前記ピストン部材への作動流体の供給を開始し、前記内燃機関の停止に伴って前記ピストン部材への作動流体の供給を停止する流体供給源と、
を備えることを特徴とするバルブタイミング調整装置。 - 前記付勢トルクは、前記駆動側回転体に対する遅角側に平均的に偏るカムトルクであることを特徴とする請求項1に記載のバルブタイミング調整装置。
- 前記ピストン部材は、作動流体の閾値以上の圧力により前記復原力に抗して前記突入位置から前記抜出位置へ移動し、
前記流体供給源は、前記内燃機関の始動時において前記閾値未満の圧力の作動流体を前記ピストン部材へ供給し、前記内燃機関の始動完了後において前記閾値以上の圧力の作動流体を前記ピストン部材へ供給することを特徴とする請求項1又は2に記載のバルブタイミング調整装置。 - 前記流体供給源は、前記内燃機関の始動完了後の定常運転中において前記ピストン部材に対する作動流体の供給を継続することを特徴とする請求項1〜3のいずれか一項に記載のバルブタイミング調整装置。
- 前記ピストン部材は、前記支持回転体により径方向へ往復移動自在に支持され、前記抜出位置は、前記突入位置よりも当該径方向の外側に設定されることを特徴とする請求項1〜4のいずれか一項に記載のバルブタイミング調整装置。
- 前記ピストン部材は、前記突入位置において前記駆動側ストッパ面及び前記従動側ストッパ面の間に挟持されることを特徴とする請求項1〜5のいずれか一項に記載のバルブタイミング調整装置。
- 通電により回転出力を発生する電動アクチュエータと、
前記駆動側回転体及び前記従動側回転体を有し、前記回転出力に応じて前記相対位相を調整する位相調整機構と、
前記電動アクチュエータへの通電を制御する通電制御回路部であって、前記内燃機関の始動時において前記電動アクチュエータへの通電をカットする通電制御回路部と、
を備えることを特徴とする請求項1〜6のいずれか一項に記載のバルブタイミング調整装置。 - 前記内燃機関の始動位相に対して前記偏り側とは反対側へずれた所定の前記相対位相が停止制御位相として定義され、
前記通電制御回路部は、前記内燃機関の停止に必須の条件を検知してから前記内燃機関が完全停止するまでの期間において、前記電動アクチュエータへの通電を制御することにより前記相対位相を前記停止制御位相に保持した後、前記電動アクチュエータへの通電をカットすることを特徴とする請求項7に記載のバルブタイミング調整装置。 - 前記支持回転体と異なる前記従動側回転体又は前記駆動側回転体としての係止回転体は、前記内燃機関の始動位相にて前記突入位置の前記ピストン部材を係止することにより前記抜出位置側への前記ピストン部材の移動を規制し、
前記通電制御回路部は、前記内燃機関の始動完了後に前記内燃機関の回転数が設定値に達するまでの期間において、前記電動アクチュエータへの通電を制御することにより前記相対位相を前記始動位相に保持することを特徴とする請求項8に記載のバルブタイミング調整装置。 - 前記係止回転体は、前記始動位相に対して前記偏り側とは反対側へずれた前記相対位相にて前記ピストン部材から離脱することにより前記ピストン部材の移動を許容し、
前記通電制御回路部は、前記内燃機関の始動完了後に前記回転数が前記設定値に達すると、前記電動アクチュエータへの通電を制御することにより前記相対位相を前記始動位相から前記偏り側と反対側へ変化させることを特徴とする請求項9に記載のバルブタイミング調整装置。 - 前記ピストン部材は、前記係止回転体のストッパ面である前記従動側ストッパ面又は前記駆動側ストッパ面に前記突入位置において当接する当接面と、当該当接面に対して凹む凹部とを有し、
前記係止回転体は、前記係止回転体のストッパ面である前記従動側ストッパ面又は前記駆動側ストッパ面から突出し前記突入位置の前記ピストン部材の前記凹部に突入する凸部を有することを特徴とする請求項9又は10に記載のバルブタイミング調整装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008000754A JP2009162109A (ja) | 2008-01-07 | 2008-01-07 | バルブタイミング調整装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008000754A JP2009162109A (ja) | 2008-01-07 | 2008-01-07 | バルブタイミング調整装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009162109A true JP2009162109A (ja) | 2009-07-23 |
Family
ID=40965003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008000754A Pending JP2009162109A (ja) | 2008-01-07 | 2008-01-07 | バルブタイミング調整装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009162109A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012233478A (ja) * | 2011-05-02 | 2012-11-29 | Magna Powertrain Ag & Co Kg | 緊急動作用装置付きのカムシャフト調整器 |
-
2008
- 2008-01-07 JP JP2008000754A patent/JP2009162109A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012233478A (ja) * | 2011-05-02 | 2012-11-29 | Magna Powertrain Ag & Co Kg | 緊急動作用装置付きのカムシャフト調整器 |
| US8757115B2 (en) | 2011-05-02 | 2014-06-24 | MAGNA Powertrain & AG & Co. KG | Camshaft adjuster with device for emergency operation |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5666922B2 (ja) | バルブタイミング制御装置のコントローラ及び内燃機関のバルブタイミング制御装置 | |
| KR100976099B1 (ko) | 전기 구동 장치를 구비한 캠 샤프트 조절기 | |
| US8682564B2 (en) | Camshaft position sensing in engines with electric variable cam phasers | |
| US7377245B2 (en) | Valve timing controller | |
| JP5093256B2 (ja) | バルブタイミング調整装置 | |
| CN102639823B (zh) | 阀开闭定时控制装置 | |
| JP2009250073A (ja) | バルブタイミング調整装置 | |
| WO2014192352A1 (ja) | オイルポンプ駆動制御装置 | |
| JP6090178B2 (ja) | バルブタイミング調整装置 | |
| JP2008240735A (ja) | 内燃機関のバルブタイミング制御装置 | |
| JP2004316635A (ja) | バルブタイミング調整装置 | |
| JP2009162110A (ja) | バルブタイミング調整装置 | |
| JP4005068B2 (ja) | 内燃機関のバルブタイミング制御装置及びその組立方法 | |
| JP2007092674A (ja) | 回転位相可変装置 | |
| JP2009162109A (ja) | バルブタイミング調整装置 | |
| JP4126325B2 (ja) | 内燃機関のバルブタイミング制御装置用ハウジング | |
| JP2005180307A (ja) | 内燃機関のバルブタイミング制御装置 | |
| JP7243252B2 (ja) | バルブタイミング調整装置、その制御装置及び制御方法 | |
| JP4678537B2 (ja) | バルブタイミング調整装置 | |
| JP7450479B2 (ja) | 弁開閉時期制御装置 | |
| JP2013160068A (ja) | バルブタイミング調整装置 | |
| JP2008215313A (ja) | バルブタイミング調整装置 | |
| JP2008255974A (ja) | バルブタイミング調整装置 | |
| JP2009215968A (ja) | 内燃機関の可変バルブタイミング装置 | |
| JP6030625B2 (ja) | バルブタイミング制御装置の制御方法及び内燃機関のバルブタイミング制御装置 |