JP2008195320A - 動力制御装置 - Google Patents
動力制御装置 Download PDFInfo
- Publication number
- JP2008195320A JP2008195320A JP2007034584A JP2007034584A JP2008195320A JP 2008195320 A JP2008195320 A JP 2008195320A JP 2007034584 A JP2007034584 A JP 2007034584A JP 2007034584 A JP2007034584 A JP 2007034584A JP 2008195320 A JP2008195320 A JP 2008195320A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- power
- speed
- generator
- mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
【課題】動力循環の発生頻度を低減して動力伝達効率の向上を図るとともに、モータの小型軽量化を図った動力制御装置を提供する。
【解決手段】エンジン動力を発電機MG1とモータMG2とに分配する第1差動機構10と、発電機MG1の回転軸の動力とモータMG2の回転軸の動力とを駆動軸に伝達する第2差動機構20と、当該係合、解放を切り換えるクラッチC1と、を備える。そして、ハイブリッドECU40は、高速運転時にはクラッチC1を係合させて、発電機MG1およびモータMG2の両方の回転軸からエンジン動力を駆動軸2に伝達させるように第2差動機構20を機能させる高速駆動モードと、低速運転時にクラッチC1を解放させて、モータMG2の回転数を減速して駆動軸2に伝達する減速機として第2差動機構20を機能させる低速駆動モードと、に切り換える。
【選択図】図1
【解決手段】エンジン動力を発電機MG1とモータMG2とに分配する第1差動機構10と、発電機MG1の回転軸の動力とモータMG2の回転軸の動力とを駆動軸に伝達する第2差動機構20と、当該係合、解放を切り換えるクラッチC1と、を備える。そして、ハイブリッドECU40は、高速運転時にはクラッチC1を係合させて、発電機MG1およびモータMG2の両方の回転軸からエンジン動力を駆動軸2に伝達させるように第2差動機構20を機能させる高速駆動モードと、低速運転時にクラッチC1を解放させて、モータMG2の回転数を減速して駆動軸2に伝達する減速機として第2差動機構20を機能させる低速駆動モードと、に切り換える。
【選択図】図1
Description
本発明は、エンジンの動力を駆動軸に速度比を変えて伝達するとともに電力変換によるトルク増幅を行う動力制御装置に関する。
従来、この種の動力制御装置は特許文献1〜3等に開示されており、以下、図13に示す従来装置の構造を説明する。
この従来装置は、発電機MG1、モータMG2および差動機構10を備えている。発電機MG1は、エンジン1の動力により発電するとともにモータとしても作動可能なモータジェネレータである。モータMG2は、駆動軸2に動力を出力してエンジン1の動力をアシストするとともに発電機としても作動可能なモータジェネレータである。そして、エンジン1の動力は、差動機構10により発電機MG1の回転軸とモータMG2の回転軸とに分配される。
この従来装置は、発電機MG1、モータMG2および差動機構10を備えている。発電機MG1は、エンジン1の動力により発電するとともにモータとしても作動可能なモータジェネレータである。モータMG2は、駆動軸2に動力を出力してエンジン1の動力をアシストするとともに発電機としても作動可能なモータジェネレータである。そして、エンジン1の動力は、差動機構10により発電機MG1の回転軸とモータMG2の回転軸とに分配される。
しかしながら、上記従来構造では、特許文献1の明細書段落〔0004〕〜〔0007〕にも記載されている「動力循環」の問題を抱えている。
すなわち、モータMG2によりエンジン1の動力をアシストするアシスト運転時には、本来であれば、発電機MG1は発電機として作動して、その回生により得られた電力をモータMG2に供給するとともに、モータMG2はモータとして作動する。しかし、駆動軸2の回転数がエンジン回転数よりも高速となる高速域になると、モータMG2は発電機として回生作動させ、発電機MG1はモータとして作動させなければならない。その結果、発電機MG1のモータ作動により出力された機械的な回転出力の一部は、モータMG2の回生作動により電力に変換され、その変換された電力は発電機MG1に戻され、再び発電機MG1のモータ作動により回転出力に変換される、といった動力循環が生じてしまう。
そして、このような動力循環が生じると、動力伝達効率が悪化し、ひいてはエンジンの燃費低下を招いてしまう。
すなわち、モータMG2によりエンジン1の動力をアシストするアシスト運転時には、本来であれば、発電機MG1は発電機として作動して、その回生により得られた電力をモータMG2に供給するとともに、モータMG2はモータとして作動する。しかし、駆動軸2の回転数がエンジン回転数よりも高速となる高速域になると、モータMG2は発電機として回生作動させ、発電機MG1はモータとして作動させなければならない。その結果、発電機MG1のモータ作動により出力された機械的な回転出力の一部は、モータMG2の回生作動により電力に変換され、その変換された電力は発電機MG1に戻され、再び発電機MG1のモータ作動により回転出力に変換される、といった動力循環が生じてしまう。
そして、このような動力循環が生じると、動力伝達効率が悪化し、ひいてはエンジンの燃費低下を招いてしまう。
また、特許文献1〜3等には、動力伝達効率を向上させる点についての記載はあるものの、モータMG2を小型軽量化させる点については記載されておらず、モータMG2自体の単体構造を改良して小型軽量化させるには限界がある。
そこで、本発明の目的は、動力循環の発生頻度を低減して動力伝達効率の向上を図るとともに、モータの小型軽量化を図った動力制御装置を提供することにある。
そこで、本発明の目的は、動力循環の発生頻度を低減して動力伝達効率の向上を図るとともに、モータの小型軽量化を図った動力制御装置を提供することにある。
請求項1記載の発明では、エンジンの動力の一部により発電するとともにモータとしても作動可能な発電機(MG1)と、エンジンの動力に付勢するとともに発電機としても作動可能なモータ(MG2)と、エンジンの動力を発電機(MG1)の回転軸とモータ(MG2)の回転軸とに分配する第1差動機構(10)と、発電機(MG1)の回転軸の動力とモータ(MG2)の回転軸の動力とを前記駆動軸に伝達する第2差動機構(20)と、第2差動機構と発電機(MG1)の回転軸との係合、解放を切り換える第1クラッチ(C1)と、第1クラッチの作動を制御する制御手段と、を備える。そして、制御手段は、駆動軸が高速回転する高速運転時に、第1クラッチを係合させて、発電機(MG1)の回転軸およびモータ(MG2)の回転軸の両方からエンジンの動力を駆動軸に伝達させるように第2差動機構を機能させる高速域モードと、駆動軸が低速回転する低速運転時に、第1クラッチを解放させて、モータ(MG2)の回転出力を減速して駆動軸に伝達する減速機として第2差動機構を機能させる低速域モードと、に切り換える。
これによれば、高速運転時には、第1クラッチを係合させるためモータ(MG2)および発電機(MG1)の両方から機械的な回転出力が駆動軸に伝達される。すると、上述した動力循環がより高速域まで回避できることになるので、動力循環の発生頻度を低減して動力伝達効率の向上を図ることができる。
また、低速運転時には、第1クラッチを解放させるため第2差動機構がモータ(MG2)の減速機として機能することとなる。よって、低速運転時におけるモータ(MG2)の要求トルクを低減できるので、モータ(MG2)の小型軽量化を図ることができる。また、第1クラッチを解放させることは低速域での動力伝達効率悪化を抑制する効果もある。
また、低速運転時には、第1クラッチを解放させるため第2差動機構がモータ(MG2)の減速機として機能することとなる。よって、低速運転時におけるモータ(MG2)の要求トルクを低減できるので、モータ(MG2)の小型軽量化を図ることができる。また、第1クラッチを解放させることは低速域での動力伝達効率悪化を抑制する効果もある。
請求項2記載の発明では、第2差動機構は第1遊星歯車機構であり、第1遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかに対して係止、解放を切り換える第1ブレーキ(B1)を備え、制御手段は、高速域モード時に第1ブレーキを解放させ、低速域モード時に第1ブレーキを係止させる。
そのため、制御手段により高速域モードと低速域モードとに切り換えることを容易に実現できる。
そのため、制御手段により高速域モードと低速域モードとに切り換えることを容易に実現できる。
請求項3記載の発明では、第2差動機構の回転出力を変速して駆動軸に伝達するとともに、複数の異なる変速比に切り換え可能な変速機構を備え、制御手段は、変速機構の変速比を切り換え制御する。
そのため、低速域モード時に変速機構の変速比を切り換え制御すれば、低速域モード時におけるエンジンおよびモータ(MG2)のトルクを2段階に切り換えることができるので、モータ(MG2)を小型化することができる。
また、高速域モード時に変速機構の変速比を切り換え制御すれば、モータおよび発電機の両方から動力を駆動軸に伝達させるにあたり、最大効率点を複数つくり、その一つを高速側に設定することにより、動力循環の発生頻度低減をより高速域まで実現でき、より一層の動力伝達効率向上を図ることができる。
そのため、低速域モード時に変速機構の変速比を切り換え制御すれば、低速域モード時におけるエンジンおよびモータ(MG2)のトルクを2段階に切り換えることができるので、モータ(MG2)を小型化することができる。
また、高速域モード時に変速機構の変速比を切り換え制御すれば、モータおよび発電機の両方から動力を駆動軸に伝達させるにあたり、最大効率点を複数つくり、その一つを高速側に設定することにより、動力循環の発生頻度低減をより高速域まで実現でき、より一層の動力伝達効率向上を図ることができる。
請求項4記載の発明では、変速機構は、サンギヤ、リングギヤおよびプラネタリキャリアを有する第2遊星歯車機構であり、第2遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかと駆動軸との係合、解放を切り換える第2クラッチ(C2)と、第2遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかに対して係止、解放を切り換える第2ブレーキ(B2)と、を備え、制御手段は、第2クラッチおよび第2ブレーキの作動を切り換えることにより変速機構の変速比を切り換え制御する。
そのため、低速域モード時にエンジンおよびモータ(MG2)のトルクを2段階に切り換える制御、および高速域モード時にモータおよび発電機の両方から駆動軸に動力伝達させることにより、最大効率点を複数つくる制御を、容易に実現できる。また、最大効率点をさらに高速側に設定できるため、より高速域まで動力伝達効率を向上することができる。
そのため、低速域モード時にエンジンおよびモータ(MG2)のトルクを2段階に切り換える制御、および高速域モード時にモータおよび発電機の両方から駆動軸に動力伝達させることにより、最大効率点を複数つくる制御を、容易に実現できる。また、最大効率点をさらに高速側に設定できるため、より高速域まで動力伝達効率を向上することができる。
ここで、図13に示す従来の動力制御装置では、空調装置のコンプレッサ等の補機をアイドルストップ時に駆動させるにあたり、単純に発電機(MG1)をモータ作動させて補機を駆動させようとすると、発電機(MG1)の回転動力が第1差動機構(10)を介して駆動軸(2)に伝達されてしまうため、アイドルストップ時の補機駆動として成立しない。因みに、補機専用のモータを設けて補機を駆動させようとすると、発電機(MG1)とは別に補機専用モータが必要となるため、動力制御装置の大型化を招く。
これに対し、請求項5記載の発明では、制御手段は、高速域モードと、低速域モードと、エンジンの停止時に、発電機(MG1)またはモータ(MG2)をモータとして作動させるとともに駆動軸に動力が出力されないように第1遊星歯車機構または第2遊星歯車機構を機能させるアイドルストップ補機駆動モードと、に切り換える。
これによれば、駆動軸に動力が出力されないように第1遊星歯車機構または第2遊星歯車機構を機能させるので、発電機(MG1)またはモータ(MG2)をモータ作動させて補機を駆動させるとともに、その回転動力が第1遊星歯車機構または第2遊星歯車機構を介して駆動軸に伝達されてしまうことを回避できる。よって、アイドルストップ時に発電機(MG1)またはモータ(MG2)をモータ作動させて補機を駆動させることを実現でき、補機専用のモータを不要にできる。
これに対し、請求項5記載の発明では、制御手段は、高速域モードと、低速域モードと、エンジンの停止時に、発電機(MG1)またはモータ(MG2)をモータとして作動させるとともに駆動軸に動力が出力されないように第1遊星歯車機構または第2遊星歯車機構を機能させるアイドルストップ補機駆動モードと、に切り換える。
これによれば、駆動軸に動力が出力されないように第1遊星歯車機構または第2遊星歯車機構を機能させるので、発電機(MG1)またはモータ(MG2)をモータ作動させて補機を駆動させるとともに、その回転動力が第1遊星歯車機構または第2遊星歯車機構を介して駆動軸に伝達されてしまうことを回避できる。よって、アイドルストップ時に発電機(MG1)またはモータ(MG2)をモータ作動させて補機を駆動させることを実現でき、補機専用のモータを不要にできる。
請求項6記載の発明では、第1差動機構のキャリア軸トルクのサンギヤへのトルク分配比α1が0.1〜0.2に設定されている。そのため、エンジントルクの発電機(MG1)の分配比が従来の約0.28よりも低減される。したがって、発電機(MG1)を小型化することができる。
請求項7記載の発明では、第1遊星歯車機構のキャリア軸トルクのリングギヤへのトルク分配比α2は、第1差動機構のキャリア軸トルクのリングギヤへのトルク分配比α1(0.8〜0.9)よりわずかに小さい値(0.65〜0.75)に設定されている。そのため、高速域モードおいてエンジン動力に対し、第1差動機構および第2差動機構による発電機(MG1)およびモータ(MG2)のトルクの増幅が達成される(例えば図5の式24参照)。したがって、エンジン動力に対するMG1、MG2の出力比率が低減され、エンジン高出力領域でも動力伝達効率を高めることができる。
請求項8記載の発明では、第1遊星歯車機構、第2遊星歯車機構の低速モードにおける減速比(1/α2/α3)が2〜3に設定されている。そのため、モータ(MG2)のトルクが減速比に対応して増幅される。したがって、モータ(MG2)を小型化することができる。
請求項9記載の発明では、発電機(MG1)の回転数が零となる第1の最大効率点における速度比が0.4〜0.7に設定されている。そのため、第1の最大効率点より速度比が小さい低速域の動力伝達効率が向上する。また、モータ(MG2)の回転数が零となる第2の最大効率点における速度比が従来(1.39)より高い1.5〜2に設定されているので、速度比が第1の最大効率点より大きい高速域において、より高速まで動力伝達効率が向上する。
請求項10記載の発明では、発電機(MG1)の回転数が零となる第1の最大効率点および第2の最大効率点における速度比がそれぞれ0.3〜0.6および0.7〜0.9に設定され、モータ(MG2)の回転数が零となる第3の最大効率点および第4の最大効率点における速度比がそれぞれ1〜1.3および1.5〜2に設定されている。そのため、4つの最大効率点に近いモードに順次切り換えることにより、低速域から高速域の広範囲で動力伝達効率が向上する。
以下、本発明の複数の実施形態を図面に基づいて説明する。
(第1実施形態)
本発明の第1実施形態に係る動力制御装置を図1〜図5を用いて以下に説明する。本第1実施形態に係る動力制御装置はハイブリッド自動車に適用されたものであり、図1は、ハイブリッド自動車の構成の概略を示すブロック図である。
当該ハイブリッド自動車は、エンジン1と、エンジン1の出力軸としてのクランクシャフトに接続された第1差動機構10と、第1差動機構10に接続された発電機MG1およびモータMG2と、発電機MG1の回転軸の動力とモータMG2の回転軸の動力とを駆動軸2に伝達する第2差動機構20と、車両の駆動系全体をコントロールする制御手段としてのハイブリッド用電子制御ユニット(以下、ハイブリッドECUという)40と、を備える。
(第1実施形態)
本発明の第1実施形態に係る動力制御装置を図1〜図5を用いて以下に説明する。本第1実施形態に係る動力制御装置はハイブリッド自動車に適用されたものであり、図1は、ハイブリッド自動車の構成の概略を示すブロック図である。
当該ハイブリッド自動車は、エンジン1と、エンジン1の出力軸としてのクランクシャフトに接続された第1差動機構10と、第1差動機構10に接続された発電機MG1およびモータMG2と、発電機MG1の回転軸の動力とモータMG2の回転軸の動力とを駆動軸2に伝達する第2差動機構20と、車両の駆動系全体をコントロールする制御手段としてのハイブリッド用電子制御ユニット(以下、ハイブリッドECUという)40と、を備える。
なお、発電機MG1は、エンジン1の動力により発電するとともにモータとしても作動可能なモータジェネレータであり、モータMG2は、エンジン1の動力に付勢するするとともに発電機としても作動可能なモータジェネレータである。
また、特許請求の範囲に記載の「制御手段」はハイブリッドECU40に相当し、特許請求の範囲に記載の「動力制御装置」は、第1差動機構10、第2差動機構20、発電機MG1、モータMG2、およびハイブリッドECU40等を備えて構成されている。
また、特許請求の範囲に記載の「制御手段」はハイブリッドECU40に相当し、特許請求の範囲に記載の「動力制御装置」は、第1差動機構10、第2差動機構20、発電機MG1、モータMG2、およびハイブリッドECU40等を備えて構成されている。
エンジン1は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力するエンジンであり、エンジン1の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)41により燃料噴射制御や点火制御、吸入空気量調節制御などの運転制御を行う。エンジンECU41は、ハイブリッドECU40と通信しており、ハイブリッドECU40からの制御信号によりエンジン1を運転制御すると共に必要に応じてエンジン1の運転状態に関するデータをハイブリッドECU40に出力する。
第1差動機構10は、外歯歯車のサンギヤ12と、このサンギヤ12と同心円上に配置された内歯歯車のリングギヤ13と、サンギヤ12に噛合すると共にリングギヤ13に噛合する複数のピニオンギヤ(図示せず)と、複数のピニオンギヤを自転かつ公転自在に保持するキャリア11とを備え、サンギヤ12とリングギヤ13とキャリア11とを回転要素として差動作用を行なう遊星歯車機構として構成されている。
そして、キャリア11にはエンジン1のクランクシャフトが、サンギヤ12には発電機MG1の回転軸が、リングギヤ13にはモータMG2の回転軸がそれぞれ連結されている。
そして、キャリア11にはエンジン1のクランクシャフトが、サンギヤ12には発電機MG1の回転軸が、リングギヤ13にはモータMG2の回転軸がそれぞれ連結されている。
第2差動機構20は、外歯歯車のサンギヤ22と、このサンギヤ22と同心円上に配置された内歯歯車のリングギヤ23と、サンギヤ22に噛合すると共にリングギヤ23に噛合する複数のピニオンギヤ(図示せず)と、複数のピニオンギヤを自転かつ公転自在に保持するキャリア21とを備え、サンギヤ22とリングギヤ23とキャリア21とを回転要素として差動作用を行なう遊星歯車機構(特許請求の範囲に記載の第1遊星歯車機構に相当)として構成されている。
そして、キャリア21には動力制御装置の出力軸としての駆動軸2が、サンギヤ22には発電機MG1の回転軸が、リングギヤ23にはモータMG2の回転軸がそれぞれ連結されている。
そして、キャリア21には動力制御装置の出力軸としての駆動軸2が、サンギヤ22には発電機MG1の回転軸が、リングギヤ23にはモータMG2の回転軸がそれぞれ連結されている。
また、発電機MG1の回転軸とサンギヤ22との間にはクラッチC1(特許請求の範囲に記載の第1クラッチに相当)が設けられており、発電機MG1の回転軸とサンギヤ22との係合、解放はクラッチC1により切り換えられる。また、サンギヤ22は、ブレーキB1(特許請求の範囲に記載の第1ブレーキに相当)の作動により、回転停止する係止状態と回転可能な解放状態とに切り換えられる。これらのクラッチC1およびブレーキB1の作動はハイブリッドECU40により制御される。
発電機MG1およびモータMG2は、共にモータジェネレータとして構成されており、インバータ31、32を介してバッテリ33と電力のやりとりを行なう。インバータ31、32とバッテリ33とを接続する電力ラインは、各インバータ31、32が共用する正極母線および負極母線として構成されており、発電機MG1およびモータMG2の一方で発電される電力を他方で消費することができるようになっている。したがって、バッテリ33は、発電機MG1およびモータMG2から生じた電力や不足する電力により充放電されることになる。
発電機MG1およびモータMG2は、共にモータ用電子制御ユニット(以下、モータECUという)42により駆動制御されている。モータECU42には、発電機MG1およびモータMG2を駆動制御するために必要な信号、例えば発電機MG1およびモータMG2の回転子の回転位置信号や発電機MG1およびモータMG2に印加される相電流信号などが入力される。また、モータECU42からは、インバータ31、32へのスイッチング制御信号が出力されている。
モータECU42は、ハイブリッドECU40と通信しており、ハイブリッドECU40からの制御信号によって発電機MG1およびモータMG2を駆動制御すると共に、必要に応じて発電機MG1およびモータMG2の運転状態に関するデータをハイブリッドECU40に出力する。
モータECU42は、ハイブリッドECU40と通信しており、ハイブリッドECU40からの制御信号によって発電機MG1およびモータMG2を駆動制御すると共に、必要に応じて発電機MG1およびモータMG2の運転状態に関するデータをハイブリッドECU40に出力する。
バッテリ33は、バッテリ用電子制御ユニット(以下、バッテリECUという)43によって管理されている。バッテリECU43には、バッテリ33を管理するのに必要な信号、例えば、バッテリ33の端子間に設置された図示しない電圧センサからの端子間電圧、バッテリ33の出力端子に接続された電力ラインに取り付けられた図示しない電流センサからの充放電電流、バッテリ33に取り付けられた図示しない温度センサからの電池温度などが入力されており、必要に応じてバッテリ33の状態に関するデータを通信によりハイブリッドECU40に出力する。
ハイブリッドECU40は、マイクロプロセッサとして構成されており、図示しないCPU、処理プログラムを記憶するROM、データを一時的に記憶するRAM、入出力ポートおよび通信ポート等を備える。
ハイブリッドECU40には、イグニッションスイッチからのイグニッション信号、シフトレバーの操作位置を示すシフトポジション信号、アクセルペダルの踏み込み量を示すアクセル開度信号、ブレーキペダルの踏み込み量を示すブレーキペダルポジション信号、車速センサからの車速信号などが入力ポートを介して入力されている。また、ハイブリッドECU40からは、クラッチC1およびブレーキB1等への駆動信号が出力ポートを介して出力されている。
ハイブリッドECU40には、イグニッションスイッチからのイグニッション信号、シフトレバーの操作位置を示すシフトポジション信号、アクセルペダルの踏み込み量を示すアクセル開度信号、ブレーキペダルの踏み込み量を示すブレーキペダルポジション信号、車速センサからの車速信号などが入力ポートを介して入力されている。また、ハイブリッドECU40からは、クラッチC1およびブレーキB1等への駆動信号が出力ポートを介して出力されている。
上記構成によるハイブリッド自動車は、アクセル開度信号と車速信号とに基づいて駆動軸2に出力すべきトルクTqを計算し、このトルクTqに対応するパワーPwが駆動軸2に出力されるように、エンジン1、発電機MG1およびモータMG2が運転制御されるとともに、クラッチC1およびブレーキB1の作動が制御される。
そして、当該ハイブリッド自動車は、ハイブリッドECU40の制御により、発進/中低速走行モード、通常走行モード、急加速モード、減速/制動モードおよびバッテリ充電モードに切り換えられる。
そして、当該ハイブリッド自動車は、ハイブリッドECU40の制御により、発進/中低速走行モード、通常走行モード、急加速モード、減速/制動モードおよびバッテリ充電モードに切り換えられる。
以下、各モードによる作動の概略を簡単に説明する。なお、通常走行モードおよび急加速モードにおけるクラッチC1およびブレーキB1の作動については、後に詳述する。
発進/中低速走行モードでは、発進時や中低速までの定常走行などエンジン効率の悪い領域において、エンジン1を停止させてモータMG2のみで走行させる。
発進/中低速走行モードでは、発進時や中低速までの定常走行などエンジン効率の悪い領域において、エンジン1を停止させてモータMG2のみで走行させる。
通常走行モードでは、エンジン1の動力を第1差動機構10により発電機MG1とモータMG2とに分配する。発電機MG1に分配された動力は、発電機MG1による回生により電力に変換され、その電力はモータMG2に供給され、当該供給された電力によりモータMG2を駆動する。一方、モータMG2に分配された動力は、モータMG2の回転軸および第2差動機構20を介して駆動軸2に伝達される。
急加速モードでは、通常走行モードと同様にして、エンジン1の動力を第1差動機構10により発電機MG1とモータMG2とに分配する。また、通常走行モードではモータMG2への電力供給を発電機MG1からのみとしているのに対し、当該急加速モードでは、発電機MG1からの電力供給に加え、バッテリ33からもモータMG2に電力供給している。
減速/制動モードでは、車輪と路面との間の摩擦により発生する回転力により、駆動軸2を回転させるとともにモータMG2の回転軸を回転させ、モータMG2を発電機として作動させて回生する。このように、モータMG2を回生ブレーキとして作用させることにより自動車の運動エネルギーの一部を電力に変換し、当該電力によりバッテリ33を充電する。
バッテリ充電モードでは、バッテリ33が一定の充電状態を維持するように制御される。バッテリ33の充電量が少なくなれば、エンジン1を始動させて発電機MG1を駆動させて充電を開始する。
なお、自動車の走行を停止させた停車時にはエンジン1を自動的に停止させる、所謂アイドルストップ運転を行う。また、エンジン1の始動時には、発電機MG1をモータ作動させてスタータモータとして機能させるようにしてもよい。
なお、自動車の走行を停止させた停車時にはエンジン1を自動的に停止させる、所謂アイドルストップ運転を行う。また、エンジン1の始動時には、発電機MG1をモータ作動させてスタータモータとして機能させるようにしてもよい。
次に、通常走行モードおよび急加速モードにおける第2差動機構20の作用について、図2〜図5を用いて以下に説明する。
ハイブリッドECU40は、図2に示すようにクラッチC1およびブレーキB1の作動を制御して、駆動軸2が低速回転する低速域モード(1)と、駆動軸2が高速回転する高速域モード(2)とに切り換える。駆動軸2の回転数ωoとエンジン1のクランク軸の回転数ωeとの比ωo/ωeを速度比Xと呼び、当該速度比Xが所定値Xa(図3参照)より大きくなったときを上記高速域モードとし、所定値Xa以下になったときを上記低速域モードとして制御している。
ハイブリッドECU40は、図2に示すようにクラッチC1およびブレーキB1の作動を制御して、駆動軸2が低速回転する低速域モード(1)と、駆動軸2が高速回転する高速域モード(2)とに切り換える。駆動軸2の回転数ωoとエンジン1のクランク軸の回転数ωeとの比ωo/ωeを速度比Xと呼び、当該速度比Xが所定値Xa(図3参照)より大きくなったときを上記高速域モードとし、所定値Xa以下になったときを上記低速域モードとして制御している。
低速域モード(1)では、クラッチC1を解放(オフ)させるとともにブレーキB1を係止(オン)させる。すると、第2差動機構20は、モータMG2の回転数を減速して駆動軸2に伝達する減速機として機能することとなる。
一方、高速域モード(2)では、クラッチC1を係合(オン)させるとともにブレーキB1を解放(オフ)させる。すると、第2差動機構20は、発電機MG1の回転軸およびモータMG2の回転軸の両方からエンジン1の動力を駆動軸2に伝達させるように機能することとなる。
一方、高速域モード(2)では、クラッチC1を係合(オン)させるとともにブレーキB1を解放(オフ)させる。すると、第2差動機構20は、発電機MG1の回転軸およびモータMG2の回転軸の両方からエンジン1の動力を駆動軸2に伝達させるように機能することとなる。
第1差動機構10は、キャリア11から入力されるエンジン1からの動力をサンギヤ12側とリングギヤ13側にそのギヤ比に応じて分配する。
第2差動機構20は、低速域モード(1)のときには、リングギヤ13から入力されるモータMG2からの動力を減速してキャリア21から駆動軸2に出力する。一方、高速域モード(2)のときには、リングギヤ13側に入力されるモータMG2の回転軸からの動力と、サンギヤ12側に入力される発電機MG1の回転軸からの動力とをキャリア21から駆動軸2に出力する。
図3は、速度比ωo/ωeと動力制御装置による動力伝達効率ηとの関係を示すグラフであり、図3中の実線は本第1実施形態による動力伝達効率ηを示し、点線は図13に示す従来構造による動力伝達効率ηを示す。
図3に示すように動力伝達効率ηは符号P1、P2に示す点をピークとし、これらのピーク点P1、P2よりも高速域側であるほど動力伝達効率ηは低下する。この現象は、これらの点P1、P2より高速域側で動力循環が生じていることを意味する。そして、高速域モード(2)に切り換えられると、動力循環が生じる点がP1からP2にシフトし、上述した動力循環をより高速域側まで回避することができる。また、図3は機械系の効率ηmを100%として近似している(図3の効率に機械効率ηmを積算した値が実際の効率ηである。)。
図3に示すように動力伝達効率ηは符号P1、P2に示す点をピークとし、これらのピーク点P1、P2よりも高速域側であるほど動力伝達効率ηは低下する。この現象は、これらの点P1、P2より高速域側で動力循環が生じていることを意味する。そして、高速域モード(2)に切り換えられると、動力循環が生じる点がP1からP2にシフトし、上述した動力循環をより高速域側まで回避することができる。また、図3は機械系の効率ηmを100%として近似している(図3の効率に機械効率ηmを積算した値が実際の効率ηである。)。
以下、このように動力循環が高速域側にシフトする理由等をより具体的に説明する。
図4は低速域モード(1)における共線図であり、低速域モード(1)時における動力制御装置の動力伝達効率ηは、図4中の式(11)〜(16)に基づき図3中の式(1)に示す一次関数で近似できる。また、従来構造による点P1より低速域側の動力伝達効率ηは、図3中の式(1a)に示す一次関数で近似できる。
図5は高速域モード(2)における共線図であり、高速域モード(2)時における動力制御装置の動力伝達効率ηは、図5中の式(21)〜(25)に基づき図3中の式(2)に示す一次関数で近似できる。また、従来構造による点P1より高速域側の動力伝達効率ηは、図3中の式(2a)に示す一次関数で近似できる。
図4は低速域モード(1)における共線図であり、低速域モード(1)時における動力制御装置の動力伝達効率ηは、図4中の式(11)〜(16)に基づき図3中の式(1)に示す一次関数で近似できる。また、従来構造による点P1より低速域側の動力伝達効率ηは、図3中の式(1a)に示す一次関数で近似できる。
図5は高速域モード(2)における共線図であり、高速域モード(2)時における動力制御装置の動力伝達効率ηは、図5中の式(21)〜(25)に基づき図3中の式(2)に示す一次関数で近似できる。また、従来構造による点P1より高速域側の動力伝達効率ηは、図3中の式(2a)に示す一次関数で近似できる。
ここで、式(1)、(2)、(11)〜(16)、(21)〜(25)中の各変数および定数は以下の如く定義、設定されている。
Te、ωe:エンジン1のクランクシャフトから出力されるエンジントルク、およびその回転数、
Tg、ω1:発電機MG1の出力トルク、およびその回転数
Tr、ωr:リングギヤに伝達されるトルク、およびその回転数
Tm:モータMG2により出力されるトルク
To:駆動軸2の出力トルク
ηe:電力系の動力変換効率であり、発電効率×モータ効率×インバータ効率に相当する。
i=1:第1差動機構10、
i=2:第2差動機構20、
Zri(i=1,2):リングギヤ13、23の歯数、
Zsi(i=1,2):サンギヤ12、22の歯数、
αi(i=1,2):キャリア11、21のトルクのリングギヤ13、23へのトルク分配比(=歯数比:Zri/(Zri+Zsi)に相当する)、
α3:駆動軸2に設けた図示しない固定ギヤによる速度比(逆数1/α3が減速比に相当)。
また、本第1実施形態では、α1=0.84、α2=0.66、α3=0.77となるように式(16)により歯数比を設定している。
Te、ωe:エンジン1のクランクシャフトから出力されるエンジントルク、およびその回転数、
Tg、ω1:発電機MG1の出力トルク、およびその回転数
Tr、ωr:リングギヤに伝達されるトルク、およびその回転数
Tm:モータMG2により出力されるトルク
To:駆動軸2の出力トルク
ηe:電力系の動力変換効率であり、発電効率×モータ効率×インバータ効率に相当する。
i=1:第1差動機構10、
i=2:第2差動機構20、
Zri(i=1,2):リングギヤ13、23の歯数、
Zsi(i=1,2):サンギヤ12、22の歯数、
αi(i=1,2):キャリア11、21のトルクのリングギヤ13、23へのトルク分配比(=歯数比:Zri/(Zri+Zsi)に相当する)、
α3:駆動軸2に設けた図示しない固定ギヤによる速度比(逆数1/α3が減速比に相当)。
また、本第1実施形態では、α1=0.84、α2=0.66、α3=0.77となるように式(16)により歯数比を設定している。
式(1)に示す一次関数によれば、低速域モード(1)時の動力伝達効率ηは、速度比がX=Xa=α2α3/α1=0.6で最大値1となることが導き出される。一方、従来構造に係る式(1a)の一次関数によれば、動力伝達効率ηは、X=1/α=1.39で最大値1となることが導き出される。従って、本第1実施形態によれば、速度比が小さい走行領域で動力伝達効率ηが向上することが導き出される。例えばX=Xa=0.6の走行領域では動力伝達効率ηは0.83から1に向上する。この第1の最大効率点(X=0.6)は、発電機(MG1)の回転数が零の状態に対応する。
式(2)に示す関数によれば、高速域モード(2)時の動力伝達効率ηは、速度比がX=Xa=α2α3/α1=0.6、及びX=Xb=(1−α2)α3/(1−α1)=1.63の2点で最大値1となることが導き出される。第2の最大効率点(X=1.63)は、モータ(MG2)の回転数が零の状態に対応する一方、従来構造に係る式(2a)の一次関数によれば、動力伝達効率ηは、X=1/α=1.39の1点で最大値1となることが導き出される。従って、本第1実施形態によれば、第1の最大効率点および第2の最大効率点(速度比=Xa、Xb)を持つことに起因して、Xa≦X≦Xbの範囲で高効率(例えばη>0.9)となり、速度比が大きい走行領域で動力伝達効率ηが向上することが導き出される。例えばX=Xb=1.63の走行領域では動力伝達効率ηは0.93から1に向上し、X=Xb=2の走行領域では動力伝達効率ηは0.81から0.9に向上する。
さらに、第1の最大効率点および第2の最大効率点(速度比=Xa、Xb)を持つことに起因して、上述した如く動力循環が生じる点が図3中のP1からP2にシフトして動力循環を高速域まで回避できることになるので、動力循環の発生頻度を低減して動力伝達効率の向上を図ることができる。
さらに、第1の最大効率点および第2の最大効率点(速度比=Xa、Xb)を持つことに起因して、上述した如く動力循環が生じる点が図3中のP1からP2にシフトして動力循環を高速域まで回避できることになるので、動力循環の発生頻度を低減して動力伝達効率の向上を図ることができる。
従来構造による駆動軸トルクToは、To=α1Te+Tmとなるのに対し、本第1実施形態による駆動軸トルクToは、式(13)に示すように減速比1/α2だけトルク増倍できる(駆動軸2に設けた図示しない固定ギヤによる減速比を含めた場合には減速比1/(α2α3)だけトルク増倍できる)。このように、低速域モード(1)では、第2差動機構20が減速機として機能することにより、駆動軸トルクToを増倍できるので、エンジン1の出力トルクTeとモータMG2の出力トルクTmとの両方を増倍できる。よって、エンジンおよびモータの双方が最大トルクを必要とする発進、加速、登坂走行等において、減速機として機能する第2差動機構20を持たない図13に示す従来構造に対して、モータMG2への要求トルクを低減でき、モータMG2を小型化できる。因みに、例えば上述の如くα2=0.66、α3=0.77に設定した場合には、モータMG2への要求トルクを約50%低減できる。
また、本第1実施形態では、発電機MG1が負担するエンジントルク分配比Zs1/(Zr1+Zs1)が10〜20%(より好ましくは約16%)となるように、従来構造に比べて歯数比Zs1/Zr1を小さく設定している。なお、図13に示す従来構造に係る分配比は約28%である。これによれば、発電機MG1への要求トルクを約40%低減させることができ、発電機MG1の小型軽量化を図ることができる。
さらに、本第1実施形態によれば、低速域モード(1)と高速域モード(2)とを切り換える時は、クラッチC1により係合/解放される第1差動機構10および第2差動機構20について、各々のサンギヤ12、22の回転数がシステム的に零に近い状態にある。そのため、両サンギヤ12、22の相対回転数も必然的に小さいので、係合状態を低速域モード(1)と高速域モード(2)との間で素早く切替えても係合ショックを小さく出来る。
以下、第2〜第4実施形態をそれぞれ図6〜図12を用いて説明する。なお、第1実施形態と実質的に同一の構成部位には同一の符号を付し、説明を省略する。
(第2実施形態)
本発明の第2実施形態に係る動力制御装置を、図6〜図8を用いて以下に説明する。
本第2実施形態では、上記第1実施形態の構成に加え、図6に示すように変速機構50、クラッチC2(特許請求の範囲に記載の第2クラッチに相当)、およびブレーキB2(特許請求の範囲に記載の第2ブレーキに相当)を備えている。
変速機構50は、第2差動機構20の回転出力を変速して駆動軸2に伝達するとともに、ハイブリッドECU40により制御されて複数の異なる変速比に切り換えて変速するものである。
本発明の第2実施形態に係る動力制御装置を、図6〜図8を用いて以下に説明する。
本第2実施形態では、上記第1実施形態の構成に加え、図6に示すように変速機構50、クラッチC2(特許請求の範囲に記載の第2クラッチに相当)、およびブレーキB2(特許請求の範囲に記載の第2ブレーキに相当)を備えている。
変速機構50は、第2差動機構20の回転出力を変速して駆動軸2に伝達するとともに、ハイブリッドECU40により制御されて複数の異なる変速比に切り換えて変速するものである。
より具体的に説明すると、変速機構50は、外歯歯車のサンギヤ52と、このサンギヤ52と同心円上に配置された内歯歯車のリングギヤ53と、サンギヤ52に噛合すると共にリングギヤ53に噛合する複数のピニオンギヤ(図示せず)と、複数のピニオンギヤを自転かつ公転自在に保持するキャリア51とを備え、サンギヤ52とリングギヤ53とキャリア51とを回転要素として差動作用を行なう遊星歯車機構(特許請求の範囲に記載の第2遊星歯車機構に相当)として構成されている。
そして、キャリア51には動力制御装置の出力軸としての駆動軸2が、サンギヤ52にはブレーキB1が、リングギヤ53には第2差動機構20のキャリア21がそれぞれ連結されている。また、遊星ギヤの歯数比は、α1=0.84、α2=0.7、α3=0.6となるよう設定されている。ここで、αi(i=1、2、3)は、キャリア11、21、51のトルクのリングギヤ13、23、53へのトルク分配比(=歯数比:Zri/(Zri+Zsi)に相当する値)である。
そして、キャリア51には動力制御装置の出力軸としての駆動軸2が、サンギヤ52にはブレーキB1が、リングギヤ53には第2差動機構20のキャリア21がそれぞれ連結されている。また、遊星ギヤの歯数比は、α1=0.84、α2=0.7、α3=0.6となるよう設定されている。ここで、αi(i=1、2、3)は、キャリア11、21、51のトルクのリングギヤ13、23、53へのトルク分配比(=歯数比:Zri/(Zri+Zsi)に相当する値)である。
また、駆動軸2とサンギヤ52との間にはクラッチC2が設けられており、駆動軸2とサンギヤ52との係合、解放はクラッチC2により切り換えられる。また、サンギヤ52は、ブレーキB2の係止および解放により、回転停止状態と回転可能状態とに切り換えられる。これらのクラッチC2およびブレーキB2の作動はハイブリッドECU40により制御される。
ハイブリッドECU40は、図7に示すようにクラッチC1、C2およびブレーキB1、B2の作動を制御して、図2と同様の低速域モード(1)と高速域モード(2)とに切り換えることに加え、2段目低速モードIと2段目高速モードIIとに切り換えることにより、図7に示すように4つのモードに切り換える。
2段目低速モードIでは、クラッチC2を解放(オフ)させるとともにブレーキB2を係止(オン)させ、変速機構50による変速比は、1/α3=1.67となる。
一方、2段目高速モードIIでは、クラッチC2を係合(オン)させるとともにブレーキB2を解放(オフ)させる。すると、変速機構50による変速比は、1すなわち直結状態となる。
なお、これら4つのモードを切り換えるにあたり、図7に示す順番で1ステップずつ切り換えることに限らず、例えば2段目低速モードIの高速域モード(2)から2段目高速モードIIの高速域モード(2)に切り換えるようにしてもよい。これによれば、加速要求が小さい場合のモード切換頻度を減らすことができ、変速ショックの低減と動力伝達効率の両立が図られる。
2段目低速モードIでは、クラッチC2を解放(オフ)させるとともにブレーキB2を係止(オン)させ、変速機構50による変速比は、1/α3=1.67となる。
一方、2段目高速モードIIでは、クラッチC2を係合(オン)させるとともにブレーキB2を解放(オフ)させる。すると、変速機構50による変速比は、1すなわち直結状態となる。
なお、これら4つのモードを切り換えるにあたり、図7に示す順番で1ステップずつ切り換えることに限らず、例えば2段目低速モードIの高速域モード(2)から2段目高速モードIIの高速域モード(2)に切り換えるようにしてもよい。これによれば、加速要求が小さい場合のモード切換頻度を減らすことができ、変速ショックの低減と動力伝達効率の両立が図られる。
図8は、速度比ωo/ωeと動力制御装置による動力伝達効率ηとの関係を示すグラフであり、図8中の実線は、2段目低速モードIにおける低速域モード(1)および高速域モード(2)の動力伝達効率ηを示し、一点鎖線は、2段目高速モードIIにおける低速域モード(1)および高速域モード(2)の動力伝達効率ηを示し、点線は、図13に示す従来構造による動力伝達効率ηを示す。
2段目低速モードIおよび2段目高速モードIIのいずれの場合であっても、高速域モード(2)に切り換えられると、モータMG2および発電機MG1の両方の回転軸からの動力が駆動軸2に伝達され、動力循環が生じる点が高速域側に移動する。図8は、2段目高速モードIIにて高速域モード(2)に切り換えると、動力循環が生じる点が従来構造に比べて高速域側にシフトすることを示している。
また、図8は、変速機構50を追加したことで最大効率点が4つに増えることを表している。各点の速度比は、順にX1=α2α3/α1=0.5、X2=α2/α1=0.83、X3=(1−α2)α3/(1−α1)=1.13、X4=(1−α2)/(1−α1)=1.88に設定している。ハイブリッドECU40の制御により図7に示す4つのモードを切り換えるにあたり、各々のモードにおける最大効率付近を順次選択して切り換えることで、低速から高速まで広い速度比範囲で動力伝達効率ηが向上する。
つまり、低速域モード(1)において2段目低速モードIおよび2段目高速モードIIの2つのモードに切り換え制御するため、エンジンおよびモータMG2のトルクを2段階に切り換え、モータ(MG2)を小型化することができる。
また、高速域モード(2)において2段目低速モードIおよび2段目高速モードIIの2つのモードに切り換え制御するため、モータMG2および発電機MG1の両方の動力を駆動軸2に伝達させるにあたり、最大効率点を複数つくり、その一つを高速側(速度比=1.88)に設定することにより、動力循環の発生頻度低減をより高速域まで実現でき、より一層の動力伝達効率ηの向上を図ることができる。
つまり、低速域モード(1)において2段目低速モードIおよび2段目高速モードIIの2つのモードに切り換え制御するため、エンジンおよびモータMG2のトルクを2段階に切り換え、モータ(MG2)を小型化することができる。
また、高速域モード(2)において2段目低速モードIおよび2段目高速モードIIの2つのモードに切り換え制御するため、モータMG2および発電機MG1の両方の動力を駆動軸2に伝達させるにあたり、最大効率点を複数つくり、その一つを高速側(速度比=1.88)に設定することにより、動力循環の発生頻度低減をより高速域まで実現でき、より一層の動力伝達効率ηの向上を図ることができる。
また、エンジントルクとモータMG2のトルクの両方に対し、減速機として作動する第2差動機構20によるトルク増倍効果に、2段目低速モードIにおける変速機構50のトルク増倍効果を相乗させることができる。そのため、モータMG2への要求トルクを大幅に低減でき、モータMG2をさらに小型軽量化できる。因みに、例えば上述の如くα2=0.7、α3=0.6に設定した場合には、その減速比1/(α2α3)の効果により、モータMG2への要求トルクを約60%低減できる。
(第3実施形態)
本発明の第3実施形態に係る動力制御装置を、図9および図10を用いて以下に説明する。
本第3実施形態では、上記第1実施形態の構成に加え、図9に示すように補機としてのコンプレッサ60および電磁クラッチ61を備えている。コンプレッサ60は、車両に搭載された空調装置の冷凍サイクルを構成する部品であり、冷媒を吸入、圧縮、吐出するものである。
本発明の第3実施形態に係る動力制御装置を、図9および図10を用いて以下に説明する。
本第3実施形態では、上記第1実施形態の構成に加え、図9に示すように補機としてのコンプレッサ60および電磁クラッチ61を備えている。コンプレッサ60は、車両に搭載された空調装置の冷凍サイクルを構成する部品であり、冷媒を吸入、圧縮、吐出するものである。
また、図9に示すように、コンプレッサ60は、発電機MG1と第1差動機構10との連結軸に電磁クラッチ61を介して連結されている。なお、コンプレッサ60と連結軸との連結は、回転軸同士を連結させてもよいしベルトを介して連結させてもよい。
発電機MG1とコンプレッサ60との連結、遮断は電磁クラッチ61により切り換えられ、当該電磁クラッチ61の作動はハイブリッドECU40により制御される。
発電機MG1とコンプレッサ60との連結、遮断は電磁クラッチ61により切り換えられ、当該電磁クラッチ61の作動はハイブリッドECU40により制御される。
ハイブリッドECU40は、図10に示すようにクラッチC1、ブレーキB1および電磁クラッチ61の作動を制御して、前述した低速域モード(1)および高速域モード(2)と、アイドルストップ補機駆動モード(3)と、に切り換える。
補機駆動モード(3)は、前述したアイドルストップ運転時にコンプレッサ60を駆動させるためのモードであり、エンジン1の停止時に、発電機MG1をモータとして作動させる。そして、補機駆動モード(3)では、クラッチC1を解放(オフ)させるとともにブレーキB1を解放(オフ)させ、かつ、電磁クラッチ61を係合(オン)させる。
補機駆動モード(3)は、前述したアイドルストップ運転時にコンプレッサ60を駆動させるためのモードであり、エンジン1の停止時に、発電機MG1をモータとして作動させる。そして、補機駆動モード(3)では、クラッチC1を解放(オフ)させるとともにブレーキB1を解放(オフ)させ、かつ、電磁クラッチ61を係合(オン)させる。
このようにクラッチC1およびブレーキB1をオフさせることにより、第2差動機構20のリングギヤ23が回転するもののサンギヤ22が空転することとなるため、モータ作動する発電機MG1の回転駆動力がキャリア21から駆動軸2に伝達されることを回避できる。よって、アイドルストップ時に発電機MG1をモータ作動させてコンプレッサ60を駆動させることを実現でき、コンプレッサ60専用のモータを不要にできる。
(第4実施形態)
本発明の第4実施形態に係る動力制御装置を、図11および図12を用いて以下に説明する。
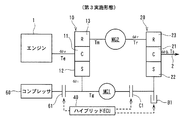
上記第3実施形態は第1実施形態に補機駆動モード(3)を追加した構成であるのに対し、本第4実施形態は第2実施形態に補機駆動モード(3)を追加した構成であり、上記第2実施形態の構成に加え、図11に示すように補機としてのコンプレッサ60、電磁クラッチ61、プーリ62、63およびベルト64を備えている。そして、当該コンプレッサ60は、第2差動機構20と変速機構50との連結軸に、プーリ62、63、ベルト64および電磁クラッチ61を介して連結されている。
本発明の第4実施形態に係る動力制御装置を、図11および図12を用いて以下に説明する。
上記第3実施形態は第1実施形態に補機駆動モード(3)を追加した構成であるのに対し、本第4実施形態は第2実施形態に補機駆動モード(3)を追加した構成であり、上記第2実施形態の構成に加え、図11に示すように補機としてのコンプレッサ60、電磁クラッチ61、プーリ62、63およびベルト64を備えている。そして、当該コンプレッサ60は、第2差動機構20と変速機構50との連結軸に、プーリ62、63、ベルト64および電磁クラッチ61を介して連結されている。
ハイブリッドECU40は、図12に示すようにクラッチC1、C2、ブレーキB1、B2および電磁クラッチ61の作動を制御して、前述した低速域モード(1)、高速域モード(2)、2段目低速モードI、2段目高速モードII、およびアイドルストップ補機駆動モード(3)と、に切り換える。
補機駆動モード(3)では、クラッチC1、C2を解放(オフ)させるとともにブレーキB2を解放(オフ)させ、かつ、電磁クラッチ61を係合(オン)させる。また、ブレーキB1を係止(オン)することにより、第2差動機構20をモータMG2の減速機として機能させる。
補機駆動モード(3)では、クラッチC1、C2を解放(オフ)させるとともにブレーキB2を解放(オフ)させ、かつ、電磁クラッチ61を係合(オン)させる。また、ブレーキB1を係止(オン)することにより、第2差動機構20をモータMG2の減速機として機能させる。
このようにクラッチC1、C2およびブレーキB2をオフさせることにより、変速機構50のリングギヤ53が回転するもののサンギヤ52が空転することとなるため、モータMG2の回転駆動力がキャリア51から駆動軸2に伝達されることを回避できる。よって、アイドルストップ時にモータMG2を作動させてコンプレッサ60を駆動させることを実現でき、コンプレッサ60専用のモータを不要にできる。
(他の実施形態)
上記各実施形態では、第1差動機構10、第2差動機構20および変速機構50に遊星歯車機構を適用しているが、本発明は遊星歯車機構に限定されるものではない。また、上記各実施形態では、サンギヤとリングギヤを1列のピニオンギヤを介して連結する所謂シングルピニオンタイプの遊星歯車機構を採用しているが、例えば、2列のピニオンギヤを介して連結する所謂ダブルピニオンタイプの遊星歯車機構を採用してもよい。
また、上記第3および第4実施形態では、補機としてコンプレッサ60を適用させているが、ウォータポンプ、オイルポンプ等の補機類を発電機MG1により駆動させるようにしてもよい。
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば、上記各実施形態の特徴的構造をそれぞれ任意に組み合わせるようにしてもよい。
上記各実施形態では、第1差動機構10、第2差動機構20および変速機構50に遊星歯車機構を適用しているが、本発明は遊星歯車機構に限定されるものではない。また、上記各実施形態では、サンギヤとリングギヤを1列のピニオンギヤを介して連結する所謂シングルピニオンタイプの遊星歯車機構を採用しているが、例えば、2列のピニオンギヤを介して連結する所謂ダブルピニオンタイプの遊星歯車機構を採用してもよい。
また、上記第3および第4実施形態では、補機としてコンプレッサ60を適用させているが、ウォータポンプ、オイルポンプ等の補機類を発電機MG1により駆動させるようにしてもよい。
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば、上記各実施形態の特徴的構造をそれぞれ任意に組み合わせるようにしてもよい。
1:エンジン、2:駆動軸、10:第1差動機構、20:第2差動機構、50:変速機構、60:コンプレッサ(補機)、61:電磁クラッチ、B1:ブレーキ(第1ブレーキ)、B2:ブレーキ(第2ブレーキ)、C1:クラッチ(第1クラッチ)、C2:クラッチ(第2クラッチ)、40:ハイブリッドECU(制御手段)、MG1:発電機、MG2:モータ
Claims (10)
- エンジンの動力を駆動軸に速度比を変えて伝達するとともに電力変換によるトルク増幅を行う動力制御装置であって、
前記エンジンの動力の一部により発電するとともにモータとしても作動可能な発電機(MG1)と、
前記エンジンの動力に付勢するとともに発電機としても作動可能なモータ(MG2)と、
前記エンジンの動力を前記発電機(MG1)の回転軸と前記モータ(MG2)の回転軸とに分配する第1差動機構(10)と、
前記発電機(MG1)の回転軸の動力と前記モータ(MG2)の回転軸の動力とを前記駆動軸に伝達する第2差動機構(20)と、
前記第2差動機構と前記発電機(MG1)の回転軸との係合、解放を切り換える第1クラッチ(C1)と、
前記第1クラッチの作動を制御する制御手段と、
を備え、
前記制御手段は、
前記駆動軸が高速回転する高速運転時に、前記第1クラッチを係合させて、前記発電機(MG1)の回転軸および前記モータ(MG2)の回転軸の両方から前記エンジンの動力を前記駆動軸に伝達させるように前記第2差動機構を機能させる高速域モードと、
前記駆動軸が低速回転する低速運転時に、前記第1クラッチを解放させて、前記モータ(MG2)の回転軸を減速して前記駆動軸に動力伝達する減速機として前記第2差動機構を機能させる低速域モードと、
に切り換えることを特徴とする動力制御装置。 - 前記第2差動機構は、サンギヤ、リングギヤおよびプラネタリキャリアを有する第1遊星歯車機構であり、
前記第1遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかに対して係止、解放を切り換える第1ブレーキ(B1)を備え、
前記制御手段は、前記高速域モード時に前記第1ブレーキを解放させ、前記低速域モード時に前記第1ブレーキを係止させる請求項1記載の動力制御装置。 - 前記第2差動機構の回転出力を変速して前記駆動軸に伝達するとともに、複数の異なる変速比に切り換え可能な変速機構を備え、
前記制御手段は、前記変速機構の変速比を切り換え制御する請求項1または2記載の動力制御装置。 - 前記変速機構は、サンギヤ、リングギヤおよびプラネタリキャリアを有する第2遊星歯車機構であり、
前記第2遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかと前記駆動軸との係合、解放を切り換える第2クラッチ(C2)と、
前記第2遊星歯車機構のサンギヤ、リングギヤおよびプラネタリキャリアのいずれかに対して係止、解放を切り換える第2ブレーキ(B2)と、を備え、
前記制御手段は、前記第2クラッチおよび前記第2ブレーキの作動を切り換えることにより前記変速機構の変速比を切り換え制御する請求項3記載の動力制御装置。 - 前記制御手段は、
前記高速域モードと、
前記低速域モードと、
前記エンジンの停止時に、前記発電機(MG1)または前記モータ(MG2)をモータとして作動させるとともに前記駆動軸に動力が出力されないように前記第1遊星歯車機構または前記第2遊星歯車機構を機能させるアイドルストップ補機駆動モードと、
に切り換える請求項4記載の動力制御装置。 - 前記第1差動機構は、サンギヤ、リングギヤおよびプラネタリキャリアを有する遊星歯車機構であり、前記第1差動機構のキャリア軸トルクのリングギヤへのトルク分配比α1が、0.8〜0.9に設定されている請求項1から5のいずれか一項記載の動力制御装置。
- 前記第1遊星歯車機構のキャリア軸トルクのリングギヤへのトルク分配比α2は、0.65〜0.75に設定されている請求項2から5のいずれか一項記載の動力制御装置。
- 前記第1遊星歯車機構、および前記第2遊星歯車機構の低速モードにおける減速比(1/α2/α3)は、2〜3に設定されている請求項4記載の動力制御装置。
- 前記発電機(MG1)の回転数が零となる第1の最大効率点における速度比が0.4〜0.7に設定され、前記モータ(MG2)の回転数が零となる第2の最大効率点における速度比が1.5〜2に設定されている請求項1から5のいずれか一項記載の動力制御装置。
- 前記発電機(MG1)の回転数が零となる第1の最大効率点および第2の最大効率点における速度比がそれぞれ0.3〜0.6、0.7〜0.9に設定され、前記モータ(MG2)の回転数が零となる第3の最大効率点および第4の最大効率点における速度比がそれぞれ1〜1.3、1.5〜2に設定されている請求項3または4記載の動力制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007034584A JP2008195320A (ja) | 2007-02-15 | 2007-02-15 | 動力制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007034584A JP2008195320A (ja) | 2007-02-15 | 2007-02-15 | 動力制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008195320A true JP2008195320A (ja) | 2008-08-28 |
Family
ID=39754657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007034584A Pending JP2008195320A (ja) | 2007-02-15 | 2007-02-15 | 動力制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008195320A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010178403A (ja) * | 2009-01-27 | 2010-08-12 | Fuji Heavy Ind Ltd | 電気自動車用駆動システム |
| JP2012006580A (ja) * | 2010-05-21 | 2012-01-12 | Nsk Ltd | インホイールモータ |
| JP2012122523A (ja) * | 2010-12-07 | 2012-06-28 | Honda Motor Co Ltd | 自動変速機 |
| KR101272717B1 (ko) | 2011-03-24 | 2013-06-10 | 현대 파워텍 주식회사 | 차량용 감속장치 |
| KR101272716B1 (ko) * | 2013-01-07 | 2013-06-11 | 현대 파워텍 주식회사 | 차량용 감속장치 |
| JP2013531958A (ja) * | 2010-05-14 | 2013-08-08 | 北汽福田汽車股▲ふん▼有限公司 | 電気車両駆動システム |
| JP2015074308A (ja) * | 2013-10-08 | 2015-04-20 | 日産自動車株式会社 | 電動車両の発電制御装置 |
| CN104859646A (zh) * | 2014-02-24 | 2015-08-26 | 丰田自动车株式会社 | 混合动力车辆用驱动装置的控制装置 |
| CN106515510A (zh) * | 2016-11-30 | 2017-03-22 | 桂林师范高等专科学校 | 电动汽车电力驱动控制系统 |
| CN109501568A (zh) * | 2018-12-28 | 2019-03-22 | 樊朝晖 | 一种电动汽车双电机驱动系统及其控制方法 |
| CN113459795A (zh) * | 2020-03-31 | 2021-10-01 | 本田技研工业株式会社 | 混合动力车辆的驱动装置 |
-
2007
- 2007-02-15 JP JP2007034584A patent/JP2008195320A/ja active Pending
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010178403A (ja) * | 2009-01-27 | 2010-08-12 | Fuji Heavy Ind Ltd | 電気自動車用駆動システム |
| US9039558B2 (en) | 2010-05-14 | 2015-05-26 | Beiqi Foton Motor Co., Ltd. | Electric vehicle driving system |
| JP2013531958A (ja) * | 2010-05-14 | 2013-08-08 | 北汽福田汽車股▲ふん▼有限公司 | 電気車両駆動システム |
| JP2012006580A (ja) * | 2010-05-21 | 2012-01-12 | Nsk Ltd | インホイールモータ |
| JP2012006581A (ja) * | 2010-05-21 | 2012-01-12 | Nsk Ltd | インホイールモータ |
| JP2012006582A (ja) * | 2010-05-21 | 2012-01-12 | Nsk Ltd | インホイールモータ |
| JP2012122523A (ja) * | 2010-12-07 | 2012-06-28 | Honda Motor Co Ltd | 自動変速機 |
| KR101272717B1 (ko) | 2011-03-24 | 2013-06-10 | 현대 파워텍 주식회사 | 차량용 감속장치 |
| KR101272716B1 (ko) * | 2013-01-07 | 2013-06-11 | 현대 파워텍 주식회사 | 차량용 감속장치 |
| JP2015074308A (ja) * | 2013-10-08 | 2015-04-20 | 日産自動車株式会社 | 電動車両の発電制御装置 |
| CN104859646A (zh) * | 2014-02-24 | 2015-08-26 | 丰田自动车株式会社 | 混合动力车辆用驱动装置的控制装置 |
| JP2015157545A (ja) * | 2014-02-24 | 2015-09-03 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置の制御装置 |
| CN106515510A (zh) * | 2016-11-30 | 2017-03-22 | 桂林师范高等专科学校 | 电动汽车电力驱动控制系统 |
| CN109501568A (zh) * | 2018-12-28 | 2019-03-22 | 樊朝晖 | 一种电动汽车双电机驱动系统及其控制方法 |
| CN109501568B (zh) * | 2018-12-28 | 2023-08-11 | 智一新能源发展有限公司 | 一种电动汽车双电机驱动系统及其控制方法 |
| CN113459795A (zh) * | 2020-03-31 | 2021-10-01 | 本田技研工业株式会社 | 混合动力车辆的驱动装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008195320A (ja) | 動力制御装置 | |
| EP1260397B1 (en) | A control strategy for a hybrid vehicle while traveling in reverse | |
| JP4447039B2 (ja) | 動力出力装置および車両 | |
| US7395889B2 (en) | Hybrid drive unit for vehicles | |
| JP4140647B2 (ja) | 動力出力装置およびハイブリッド自動車 | |
| JP4293268B2 (ja) | 動力出力装置およびそれを備えたハイブリッド自動車 | |
| JP3864920B2 (ja) | ハイブリッド車両およびその動力伝達装置 | |
| JP7011754B2 (ja) | ハイブリッド車輛用トランスミッション及びパワーシステム | |
| US20100038157A1 (en) | Power output apparatus and hybrid vehicle | |
| JP2009248766A (ja) | 動力出力装置および車両 | |
| CN109532456B (zh) | 车辆用动力传递装置的控制装置 | |
| JP5842486B2 (ja) | エンジン始動制御装置 | |
| JP2008001279A (ja) | 動力出力装置およびこれを搭載する車両 | |
| JP2009190455A (ja) | 動力出力装置および車両 | |
| CN113753020B (zh) | 混合动力车辆的控制装置 | |
| WO2013145095A1 (ja) | ハイブリッド車両の駆動制御装置 | |
| JP2005125876A (ja) | ハイブリッド車の駆動装置 | |
| JPH11227476A (ja) | 自動車用駆動装置 | |
| CN110576730A (zh) | 混合动力变速器和车辆 | |
| JP4039427B2 (ja) | 自動車及びその制御方法 | |
| US9724991B2 (en) | Hybrid vehicle driving apparatus | |
| CN109532455B (zh) | 车辆的控制装置 | |
| JP4217234B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法 | |
| JP4005589B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力伝達装置 | |
| KR101123474B1 (ko) | 하이브리드 차량의 동력전달장치 |