JP2008178086A - ネットワークのノード間に時間同期化を実行する方法およびこの方法を実行する機器 - Google Patents
ネットワークのノード間に時間同期化を実行する方法およびこの方法を実行する機器 Download PDFInfo
- Publication number
- JP2008178086A JP2008178086A JP2007315997A JP2007315997A JP2008178086A JP 2008178086 A JP2008178086 A JP 2008178086A JP 2007315997 A JP2007315997 A JP 2007315997A JP 2007315997 A JP2007315997 A JP 2007315997A JP 2008178086 A JP2008178086 A JP 2008178086A
- Authority
- JP
- Japan
- Prior art keywords
- time
- message
- offset
- value
- estimated value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
- H04J3/0658—Clock or time synchronisation among packet nodes
- H04J3/0661—Clock or time synchronisation among packet nodes using timestamps
- H04J3/0667—Bidirectional timestamps, e.g. NTP or PTP for compensation of clock drift and for compensation of propagation delays
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Data Exchanges In Wide-Area Networks (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
- Small-Scale Networks (AREA)
- Computer And Data Communications (AREA)
Abstract
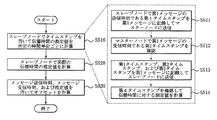
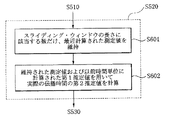
【解決手段】本発明に係るネットワークのノード間に時間同期化を実行する方法は、スレーブノードでタイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する段階と、スレーブノードで測定値およびスライディング・ウィンドウを用いて実際の伝播時間の推定値を計算する段階と、マスターノードにおけるメッセージ送信時刻、スレーブノードにおけるメッセージ受信時刻、および推定値を用いてオフセットを計算する段階とを含む。
【選択図】図5
Description

図2は、伝播時間を計算する方法の一例である。
(2)伝播時間は安定的である。すなわち、4つのタイムスタンプであるT1ないしT4を得るための時間比率が一定である。
(3)マスターノードとスレーブノードとの間に周波数の差が小さい。
(4)タイムスタンプの値は正確である。
本発明に係る時間同期化方法は、下記の(1)ないし(3)の場合に用いられるようになる。
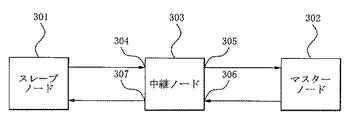
(2)それぞれのスレーブノードがマスターノードとの遅延時間を測定し、このときに、スレーブノードとマスターノードとの間に1つまたはそれ以上のエンドツーエンド(end−to−end)・トランスペアレント・クロックが存在する。
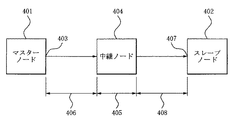
(3)スレーブノードとマスターノードとの間に1つまたはそれ以上のピアツーピア・トランスペアレント・クロックが存在し、それぞれの伝播時間が隣り合うピアツーピア・トランスペアレント・クロックのペアにおいて個別に測定される。マスターノードと1番目のピアツーピア・トランスペアレント・クロックとの伝播時間およびスレーブノードと最後のピアツーピア・トランスペアレント・クロックとの伝播時間も個別に測定される。
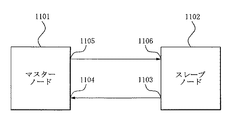
102、201、301、402、1102 スレーブノード
303、404 中継ノード
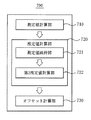
710、1010 測定値計算部
720、1020 推定値計算部
721、1021 測定値維持部
722、1023 第2推定値計算部
730、1030 オフセット計算部
1022 第1推定維持部
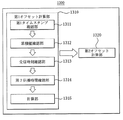
1310 第1オフセット計算部
1311 第1タイムスタンプ確認部
1312 累積値確認部
1313 受信時刻確認部
1314 第2伝播時間確認部
1315 計算部
1320 第2オフセット計算部
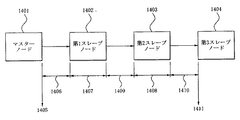
1402 第1スレーブノード
1403 第2スレーブノード
1404 第3スレーブノード
Claims (25)
- ネットワークのノード間に時間同期化を実行する方法において、
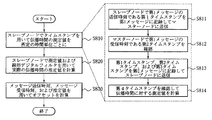
スレーブノードでタイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する段階と、
前記スレーブノードで前記測定値およびスライディング・ウィンドウを用いて実際の伝播時間の推定値を計算する段階と、
前記マスターノードにおけるメッセージ送信時刻、前記スレーブノードにおけるメッセージ受信時刻、および前記推定値を用いてオフセットを計算する段階と、
を含むことを特徴とする時間同期化方法。 - 前記スレーブノードで前記測定値およびスライディング・ウィンドウを用いて実際の伝播時間の推定値を計算する前記段階は、
前記スライディング・ウィンドウの長さに該当する数だけ、最近に計算された前記測定値を維持する段階と、
前記維持された測定値の平均および以前時間単位に計算された第1推定値を用いて、前記実際の伝播時間の第2推定値を前記推定値として計算する段階と、
を含むことを特徴とする請求項1に記載の時間同期化方法。 - 前記維持された測定値の平均を計算し、前記平均および以前時間単位に計算された第1推定値を用いて前記実際の伝播時間の第2推定値を計算する前記段階は、下記の<数式11>のように前記第2推定値を計算することを特徴とする請求項2に記載の時間同期化方法。
- ネットワークのノード間に時間同期化を実行する方法において、
スレーブノードでタイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する段階と、
前記スレーブノードで前記測定値および線形デジタルフィルタを用いて実際の伝播時間の推定値を計算する段階と、
前記マスターノードにおけるメッセージ送信時刻、前記スレーブノードにおけるメッセージ受信時刻、および前記推定値を用いてオフセットを計算する段階と、
を含むことを特徴とする時間同期化方法。 - 前記スレーブノードで前記測定値および線形デジタルフィルタを用いて実際の伝播時間の推定値を計算する前記段階は、
所定の第1数だけ前記測定値を維持する段階と、
所定の第2数だけ以前時間単位に測定された第1推定値を維持する段階と、
前記維持された測定値、前記第1推定値、および前記線形デジタルフィルタを用いて前記実際の伝播時間の推定値である第2推定値を計算する段階と、
を含み、
前記線形デジタルフィルタは、複数のフィルタ係数を前記維持された測定値および前記第1推定値に付与し、その合計を前記第2推定値として計算することを特徴とする請求項4に記載の時間同期化方法。 - 前記維持された測定値、前記第1推定値、および前記線形デジタルフィルタを用いて前記実際の伝播時間の推定値である第2推定値を計算する前記段階は、下記の<数式12>のように前記第2推定値を計算することを特徴とする請求項5に記載の時間同期化方法。
- 前記ai(1<i<n)および前記bj(0<j<m)は、下記の<数式13>を満たすことを特徴とする請求項6に記載の時間同期化方法。
- スレーブノードでタイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する前記段階は、
前記スレーブノードで第1メッセージの送信時刻である第1タイムスタンプを前記第1メッセージに記録して前記マスターノードに送信する段階と、
前記マスターノードで前記第1メッセージの受信時刻である第2タイムスタンプを確認する段階と、
前記マスターノードで前記第1タイムスタンプ、前記第2タイムスタンプ、および前記第1メッセージに対応する第2メッセージの送信時刻である第3タイムスタンプを前記第2メッセージに記録して前記スレーブノードに送信する段階と、
前記スレーブノードで前記第2メッセージの受信時刻である第4タイムスタンプを確認し、前記第1タイムスタンプおよび前記第4タイムスタンプを用いて前記伝播時間に対する測定値を計算する段階と、
を含むことを特徴とする請求項1または4に記載の時間同期化方法。 - 前記第1タイムスタンプおよび前記第4タイムスタンプを用いて前記伝播時間に対する測定値を計算する前記段階は、下記の<数式14>のように前記測定値を計算することを特徴とする請求項8に記載の時間同期化方法。
- 前記マスターノードにおけるメッセージ送信時刻、前記スレーブノードにおけるメッセージ受信時刻、および前記推定値を用いてオフセットを計算する前記段階は、下記の<数式15>のように前記オフセットを計算することを特徴とする請求項1または4に記載の時間同期化方法。
- ネットワークのノード間に時間同期化を実行する方法において、
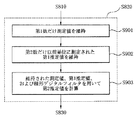
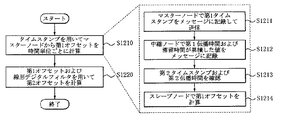
スレーブノードでタイムスタンプを用いてマスターノードからの第1オフセットを所定の時間単位ごとに計算する段階と、
前記第1オフセットおよび線形デジタルフィルタを用いて第2オフセットを計算する段階と、
を含むことを特徴とする時間同期化方法。 - スレーブノードでタイムスタンプを用いてマスターノードからの第1オフセットを所定の時間単位ごとに計算する前記段階は、
マスターノードでメッセージの送信時刻の第1タイムスタンプを前記メッセージに記録してスレーブノードに送信する段階と、
中継ノードで前記メッセージを受信したリンクの第1伝播時間および前記中継ノードにおける滞留時間が累積した値を前記メッセージに記録する段階と、
前記スレーブノードで前記メッセージの受信時刻である第2タイムスタンプおよび最後の中継ノードの間に存在するリンクの第2伝播時間を確認する段階と、
前記スレーブノードで前記第1タイムスタンプ、前記第2タイムスタンプ、前記累積した値、および前記第2伝播時間を用いて前記第1オフセットを計算する段階と、
を含むことを特徴とする請求項11に記載の時間同期化方法。 - 前記スレーブノードで前記第1タイムスタンプ、前記第2タイムスタンプ、前記累積した値、および前記第2伝播時間を用いて前記第1オフセットを計算する前記段階は、下記の<数式16>のように前記第1オフセットを計算することを特徴とする請求項12に記載の時間同期化方法。
- 前記第1オフセットおよび線形デジタルフィルタを用いて第2オフセットを計算する前記段階は、
前記第1オフセットおよび以前時間単位に測定された所定の数のオフセットを用いて、下記の<数式17>のように前記第2オフセットを計算することを特徴とする請求項11に記載の時間同期化方法。
- 請求項1ないし14のいずれか一項の方法を実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
- ネットワークのノード間に時間同期化を実行するスレーブノードを構成する機器において、
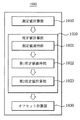
タイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する測定値計算部と、
前記測定値およびスライディング・ウィンドウを用いて実際の伝播時間の推定値を計算する推定値計算部と、
前記マスターノードにおけるメッセージ送信時刻、前記スレーブノードにおけるメッセージ受信時刻、および前記推定値を用いてオフセットを計算するオフセット計算部と、
を含むことを特徴とする機器。 - 前記推定値計算部は、
前記スライディング・ウィンドウの長さに該当する数だけ、最近に計算された前記測定値を維持する測定値維持部と、
前記維持された測定値の平均および以前時間単位に計算された第1推定値を用いて、前記実際の伝播時間の第2推定値を前記推定値として計算する第2推定値計算部と、
を含むことを特徴とする請求項16に記載の機器。 - 前記第2推定値計算部は、下記の<数式18>のように前記第2推定値を計算することを特徴とする請求項17に記載の機器。
- ネットワークのノード間に時間同期化を実行するスレーブノードを構成する機器において、
タイムスタンプを用いてマスターノードまでの伝播時間に対する測定値を所定の時間単位ごとに計算する測定値計算部と、
前記測定値および線形デジタルフィルタを用いて実際の伝播時間の推定値を計算する推定値計算部と、
前記マスターノードにおけるメッセージ送信時刻、前記スレーブノードにおけるメッセージ受信時刻、および前記推定値を用いてオフセットを計算するオフセット計算部と、
を含むことを特徴とする機器。 - 前記推定値計算部は、
所定の第1数だけ前記測定値を維持する測定値維持部と、
所定の第2数だけ前時間単位に測定された第1推定値を維持する第1推定値維持部と、
前記維持された測定値、前記第1推定値、および前記線形デジタルフィルタを用いて、前記実際の伝播時間の推定値である第2推定値を計算する第2推定値計算部
と、
を含み、
前記線形デジタルフィルタは、複数のフィルタ係数を前記維持された測定値および前記第1推定値に付与し、その合計を前記第2推定値として計算することを特徴とする請求項19に記載の機器。 - 前記第2推定値計算部は、下記の<数式19>のように前記第2推定値を計算することを特徴とする請求項20に記載の機器。
- 前記ai(1<i<n)および前記bj(0<j<m)は、下記の<数式20>を満たすことを特徴とする請求項21に記載の機器。
- ネットワークのノード間に時間同期化を実行するスレーブノードを構成する機器において、
スレーブノードでタイムスタンプを用いてマスターノードからの第1オフセットを所定の時間単位ごとに計算する第1オフセット計算部と、
前記第1オフセットおよび線形デジタルフィルタを用いて第2オフセットを計算する第2オフセット計算部と、
を含むことを特徴とする機器。 - 前記第1オフセット計算部は、
マスターノードからのメッセージを受信して前記メッセージの送信時刻である第1タイムスタンプを確認する第1タイムスタンプ確認部と、
第1伝播時間および滞留時間の累積した値を前記メッセージから確認する累積値確認部と、
前記メッセージの受信時刻である第2タイムスタンプを確認する受信時刻確認部と、
最後の中継ノード間に存在するリンクの第2伝播時間を確認する第2伝播時間確認部と、
前記第1タイムスタンプ、前記第2タイムスタンプ、前記累積した値、および前記第2伝播時間を用いて前記第1オフセットを計算する計算部と、
を含み、
前記第1伝播時間は、中継ノードで前記メッセージを受信したリンクの伝播時間であり、
前記滞留時間は、前記中継ノードにおける前記メッセージの滞留時間であることを特徴とする請求項23に記載の機器。 - 前記第2オフセット計算部は、
前記第1オフセットおよび以前時間単位に測定された所定の数のオフセットを用いて、下記の<数式21>のように前記第2オフセットを計算することを特徴とする請求項23に記載の機器。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US88152007P | 2007-01-22 | 2007-01-22 | |
| US60/881,520 | 2007-01-22 | ||
| KR10-2007-0026336 | 2007-03-16 | ||
| KR1020070026336A KR101322841B1 (ko) | 2007-01-22 | 2007-03-16 | 네트워크의 노드간에 시간 동기화를 수행하는 방법 및 상기방법을 수행하는 기기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008178086A true JP2008178086A (ja) | 2008-07-31 |
| JP4819781B2 JP4819781B2 (ja) | 2011-11-24 |
Family
ID=39641168
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007315997A Expired - Fee Related JP4819781B2 (ja) | 2007-01-22 | 2007-12-06 | ネットワークのノード間に時間同期化を実行する方法およびこの方法を実行する機器 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20080175275A1 (ja) |
| JP (1) | JP4819781B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012533910A (ja) * | 2009-07-22 | 2012-12-27 | トムソン ライセンシング | 主機器と従機器を含む同期制御システム及びその同期制御方法 |
| JP2013526167A (ja) * | 2010-04-23 | 2013-06-20 | アルカテル−ルーセント | パケット交換通信ネットワークにおけるパケットの累積滞留時間の更新 |
| JP2013532413A (ja) * | 2010-05-19 | 2013-08-15 | ゼットティーイー コーポレイション | デバイス間におけるクロック同期の実行方法及び装置 |
| JP2014505444A (ja) * | 2011-02-10 | 2014-02-27 | アルカテル−ルーセント | パケット交換ネットワークのためのネットワーク要素 |
| JP2014507896A (ja) * | 2011-02-01 | 2014-03-27 | アルカテル−ルーセント | ネットワーク遅延要素の自動取得 |
| JP2015505214A (ja) * | 2011-12-27 | 2015-02-16 | インテル・コーポレーション | マルチプロトコルのi/o相互接続の時間同期化 |
| JP2015136178A (ja) * | 2015-03-26 | 2015-07-27 | ▲ホア▼▲ウェイ▼技術有限公司 | 時刻同期を実現するための方法およびシステム |
| US9525541B2 (en) | 2011-01-26 | 2016-12-20 | Huawei Technologies Co., Ltd. | Method and system for implementing time synchronization |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9483615B2 (en) * | 2007-08-10 | 2016-11-01 | Smiths Medical Asd, Inc. | Communication of original and updated pump parameters for a medical infusion pump |
| GB2454493A (en) | 2007-11-08 | 2009-05-13 | Cambridge Silicon Radio Ltd | Improved bluetooth clock accuracy |
| CN101615963B (zh) * | 2008-06-23 | 2012-12-12 | 华为技术有限公司 | 修正域信息的处理方法及系统 |
| JP5228714B2 (ja) * | 2008-09-02 | 2013-07-03 | 富士通株式会社 | 時刻同期方法および中継装置 |
| US8416763B1 (en) | 2008-11-14 | 2013-04-09 | Cisco Technology, Inc. | System and method for providing quality inter-domain network time transport |
| US8064485B1 (en) * | 2008-11-14 | 2011-11-22 | Cisco Technology, Inc. | System and method for providing quality inter-domain network time transport |
| CN101577715A (zh) * | 2009-06-19 | 2009-11-11 | 腾讯科技(深圳)有限公司 | 一种同步网络游戏时间的方法及装置 |
| US8427963B2 (en) * | 2009-11-20 | 2013-04-23 | Symmetricom, Inc. | Method and system for analyzing and qualifying routes in packet networks |
| WO2011074664A1 (ja) * | 2009-12-18 | 2011-06-23 | 株式会社エヌ・ティ・ティ・ドコモ | 無線基地局及び中継装置 |
| US9680567B2 (en) * | 2011-03-03 | 2017-06-13 | Acacia Communications, Inc. | Fault localization and fiber security in optical transponders |
| US8644348B2 (en) * | 2011-04-20 | 2014-02-04 | Symmetricom, Inc. | Method for generating a robust timing correction in timing transfer systems |
| WO2012092892A2 (zh) | 2012-02-01 | 2012-07-12 | 华为技术有限公司 | 时间同步方法和设备及系统 |
| AT512742A1 (de) * | 2012-04-11 | 2013-10-15 | Fts Computertechnik Gmbh | Verfahren und Verteilereinheit zur zuverlässigen Vermittlung von Synchronisationsnachrichten |
| KR101702885B1 (ko) | 2012-05-02 | 2017-02-06 | 한화테크윈 주식회사 | 시간 동기화 장치 및 방법 |
| US8938636B1 (en) * | 2012-05-18 | 2015-01-20 | Google Inc. | Generating globally coherent timestamps |
| US9569253B1 (en) | 2012-06-04 | 2017-02-14 | Google Inc. | Ensuring globally consistent transactions |
| WO2014023356A1 (en) * | 2012-08-10 | 2014-02-13 | Abb Research Ltd | Latency determination in substation networks |
| KR101933366B1 (ko) * | 2012-09-25 | 2018-12-28 | 현대모비스 주식회사 | 시간 동기화 방법 |
| EP2800315B1 (de) * | 2013-04-29 | 2018-07-04 | Siemens Aktiengesellschaft | Verfahren zur zeitsynchronisation in einem kommunikationsnetz |
| GB201310114D0 (en) * | 2013-06-06 | 2013-07-24 | Sec Dep For Business Innovation & Skills The | Time synchronisation control apparatus and method |
| CN103441833B (zh) * | 2013-08-26 | 2016-08-10 | 瑞斯康达科技发展股份有限公司 | 一种主从设备频率同步方法及系统 |
| US9820246B2 (en) * | 2015-05-29 | 2017-11-14 | Gainspan Corporation | Synchronizing active window boundaries used for data transmission between pairs of nodes of a wireless network |
| US11357004B1 (en) * | 2015-11-24 | 2022-06-07 | Sprint Spectrum L.P. | Method and system for latency-based management of carriers on which to serve a user equipment device |
| CN108259105B (zh) * | 2016-12-28 | 2019-12-13 | 中国移动通信有限公司研究院 | 一种时间同步处理方法、装置及同步网络 |
| US11616588B2 (en) * | 2020-07-24 | 2023-03-28 | Dish Wireless L.L.C. | Method and system for timing synchronization in a cellular network |
| CN114374459A (zh) * | 2020-10-15 | 2022-04-19 | 华为技术有限公司 | 一种时钟同步方法以及相关装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07131853A (ja) * | 1993-11-05 | 1995-05-19 | N T T Idou Tsuushinmou Kk | 移動通信方式 |
| JPH08256161A (ja) * | 1995-03-15 | 1996-10-01 | Nec Corp | ネットワークの時刻情報同期方式 |
| JP2000035802A (ja) * | 1998-07-16 | 2000-02-02 | Fujitsu Ten Ltd | 電子制御システム |
| JP2000253368A (ja) * | 1999-02-25 | 2000-09-14 | Mitsubishi Electric Corp | 時刻情報補正装置および時刻情報補正方法 |
| JP2003115827A (ja) * | 2001-09-11 | 2003-04-18 | Nec Corp | Umtsモードで動作する移動電話機の時間基準の誤差を補正するための方法及び装置 |
| WO2006001074A1 (ja) * | 2004-06-25 | 2006-01-05 | Mitsubishi Denki Kabushiki Kaisha | 基地局間時刻同期方法、タイミングマスタ装置、および基地局 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6157957A (en) * | 1998-01-22 | 2000-12-05 | Cisco Technology, Inc. | Clock synchronization system and method using a continuous conversion function for a communication network |
| US20050018611A1 (en) * | 1999-12-01 | 2005-01-27 | International Business Machines Corporation | System and method for monitoring performance, analyzing capacity and utilization, and planning capacity for networks and intelligent, network connected processes |
| US6898642B2 (en) * | 2000-04-17 | 2005-05-24 | International Business Machines Corporation | Synchronous collaboration based on peer-to-peer communication |
| US7023884B2 (en) * | 2000-12-19 | 2006-04-04 | Lucent Technologies Inc. | Clock offset estimation with bias correction |
| US7251199B2 (en) * | 2001-12-24 | 2007-07-31 | Agilent Technologies, Inc. | Distributed system time synchronization including a timing signal path |
| US7372875B2 (en) * | 2002-09-30 | 2008-05-13 | Lucent Technologies Inc. | Systems and methods for synchronization in asynchronous transport networks |
| US20040202119A1 (en) * | 2003-04-10 | 2004-10-14 | Edge Stephen William | Base station synchronization in a wireless network |
| US7551647B2 (en) * | 2004-07-19 | 2009-06-23 | Qvidium Technologies, Inc. | System and method for clock synchronization over packet-switched networks |
| KR100608821B1 (ko) * | 2004-07-22 | 2006-08-08 | 엘지전자 주식회사 | 휴대단말기의 왕복지연시간 측정장치 및 방법 |
| US7633870B2 (en) * | 2005-04-18 | 2009-12-15 | Symmetricom, Inc. | Network forwarding device and method that forward timing packets through the device with a constant delay |
| US7869420B2 (en) * | 2005-11-16 | 2011-01-11 | Cisco Technology, Inc. | Method and system for in-band signaling of multiple media streams |
| US7487229B2 (en) * | 2006-03-30 | 2009-02-03 | Intel Corporation | Methods and apparatus to synchronize local times at nodes in a computer network |
-
2007
- 2007-08-28 US US11/846,031 patent/US20080175275A1/en not_active Abandoned
- 2007-12-06 JP JP2007315997A patent/JP4819781B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07131853A (ja) * | 1993-11-05 | 1995-05-19 | N T T Idou Tsuushinmou Kk | 移動通信方式 |
| JPH08256161A (ja) * | 1995-03-15 | 1996-10-01 | Nec Corp | ネットワークの時刻情報同期方式 |
| JP2000035802A (ja) * | 1998-07-16 | 2000-02-02 | Fujitsu Ten Ltd | 電子制御システム |
| JP2000253368A (ja) * | 1999-02-25 | 2000-09-14 | Mitsubishi Electric Corp | 時刻情報補正装置および時刻情報補正方法 |
| JP2003115827A (ja) * | 2001-09-11 | 2003-04-18 | Nec Corp | Umtsモードで動作する移動電話機の時間基準の誤差を補正するための方法及び装置 |
| WO2006001074A1 (ja) * | 2004-06-25 | 2006-01-05 | Mitsubishi Denki Kabushiki Kaisha | 基地局間時刻同期方法、タイミングマスタ装置、および基地局 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012533910A (ja) * | 2009-07-22 | 2012-12-27 | トムソン ライセンシング | 主機器と従機器を含む同期制御システム及びその同期制御方法 |
| US9026831B2 (en) | 2009-07-22 | 2015-05-05 | Gvbb Holdings S.A.R.L. | Synchronous control system including a master device and a slave device, and synchronous control method for controlling the same |
| JP2013526167A (ja) * | 2010-04-23 | 2013-06-20 | アルカテル−ルーセント | パケット交換通信ネットワークにおけるパケットの累積滞留時間の更新 |
| US9203725B2 (en) | 2010-04-23 | 2015-12-01 | Alcatel Lucent | Update of a cumulative residence time of a packet in a packet-switched communication network |
| JP2013532413A (ja) * | 2010-05-19 | 2013-08-15 | ゼットティーイー コーポレイション | デバイス間におけるクロック同期の実行方法及び装置 |
| US9525541B2 (en) | 2011-01-26 | 2016-12-20 | Huawei Technologies Co., Ltd. | Method and system for implementing time synchronization |
| JP2014507896A (ja) * | 2011-02-01 | 2014-03-27 | アルカテル−ルーセント | ネットワーク遅延要素の自動取得 |
| JP2014505444A (ja) * | 2011-02-10 | 2014-02-27 | アルカテル−ルーセント | パケット交換ネットワークのためのネットワーク要素 |
| JP2015505214A (ja) * | 2011-12-27 | 2015-02-16 | インテル・コーポレーション | マルチプロトコルのi/o相互接続の時間同期化 |
| JP2015136178A (ja) * | 2015-03-26 | 2015-07-27 | ▲ホア▼▲ウェイ▼技術有限公司 | 時刻同期を実現するための方法およびシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4819781B2 (ja) | 2011-11-24 |
| US20080175275A1 (en) | 2008-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4819781B2 (ja) | ネットワークのノード間に時間同期化を実行する方法およびこの方法を実行する機器 | |
| US10979164B2 (en) | Peer-to-peer transparent clocks and methods of estimating skew in peer-to-peer transparent clocks | |
| US9671822B2 (en) | Method and devices for time transfer using end-to-end transparent clocks | |
| US9665121B2 (en) | Method and devices for time transfer using peer-to-peer transparent clocks | |
| KR101705592B1 (ko) | 노드 간의 시간 동기화를 수행하는 네트워크 동기화 방법 및 장치 | |
| CN100499526C (zh) | 一种端到端排队时延测量方法 | |
| US9112628B2 (en) | Method and devices for compensating for path asymmetry | |
| US10216220B1 (en) | Accurate time capture and transfer between clock domains | |
| US11018789B2 (en) | End-to-end transparent clocks and methods of estimating skew in end-to-end transparent clocks | |
| CN105594146B (zh) | 用于补偿路径不对称的方法和设备 | |
| JP2010527193A (ja) | ネットワークコンポーネントのクロックを別のネットワークコンポーネントのクロックに同期させる方法及びネットワークコンポーネント | |
| Yan et al. | State estimation and data fusion for multirate sensor networks | |
| KR101576340B1 (ko) | 무선 액세스 포인트 클럭 동기화 시스템 | |
| EP3231110B1 (en) | Method and devices for time transfer using end to end transparent clocks | |
| KR101322841B1 (ko) | 네트워크의 노드간에 시간 동기화를 수행하는 방법 및 상기방법을 수행하는 기기 | |
| CN101867431B (zh) | 一种网络时钟同步方法 | |
| JP5548268B2 (ja) | クライアントクロック周波数をサーバクロック周波数と同期させる方法 | |
| KR20090104532A (ko) | 패킷 네트워크의 동기화 장치 및 그 방법 | |
| EP3231112B1 (en) | Method and devices for time transfer using peer to peer transparent clocks | |
| WO2016177240A1 (zh) | 一种实现频率同步的方法和装置 | |
| EP3824573A1 (en) | Peer-to-peer transparent clocks and methods of estimating skew in peer-to-peer transparent clocks | |
| EP3824574B1 (en) | End-to-end transparent clocks and methods of estimating skew in end-to-end transparent clocks | |
| Guruswamy et al. | Minimax optimum joint frequency and phase recovery in IEEE 1588 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110802 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110901 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140909 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |