JP2008020249A - 計測装置ならびにそれを備えた医療装置および訓練装置 - Google Patents
計測装置ならびにそれを備えた医療装置および訓練装置 Download PDFInfo
- Publication number
- JP2008020249A JP2008020249A JP2006190534A JP2006190534A JP2008020249A JP 2008020249 A JP2008020249 A JP 2008020249A JP 2006190534 A JP2006190534 A JP 2006190534A JP 2006190534 A JP2006190534 A JP 2006190534A JP 2008020249 A JP2008020249 A JP 2008020249A
- Authority
- JP
- Japan
- Prior art keywords
- light receiving
- light
- linear body
- hole
- measuring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012549 training Methods 0.000 title claims abstract description 12
- 238000012545 processing Methods 0.000 claims abstract description 59
- 238000005452 bending Methods 0.000 claims abstract description 18
- 238000004364 calculation method Methods 0.000 claims abstract description 18
- 238000006243 chemical reaction Methods 0.000 claims abstract description 15
- 238000005259 measurement Methods 0.000 claims description 43
- 239000003550 marker Substances 0.000 claims description 33
- 230000035945 sensitivity Effects 0.000 claims description 5
- 230000001678 irradiating effect Effects 0.000 claims description 4
- 230000000149 penetrating effect Effects 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 12
- 230000006835 compression Effects 0.000 description 11
- 238000007906 compression Methods 0.000 description 11
- 238000000034 method Methods 0.000 description 11
- 239000000047 product Substances 0.000 description 11
- 210000004204 blood vessel Anatomy 0.000 description 7
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000010102 embolization Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000000452 restraining effect Effects 0.000 description 3
- 206010002329 Aneurysm Diseases 0.000 description 2
- 230000002490 cerebral effect Effects 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 210000000626 ureter Anatomy 0.000 description 2
- 201000008450 Intracranial aneurysm Diseases 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 239000012466 permeate Substances 0.000 description 1
- 239000002504 physiological saline solution Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
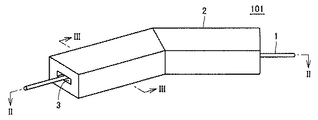
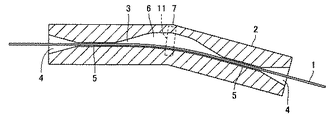
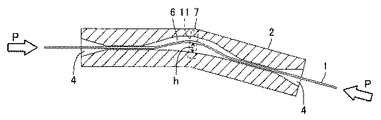
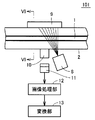
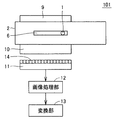
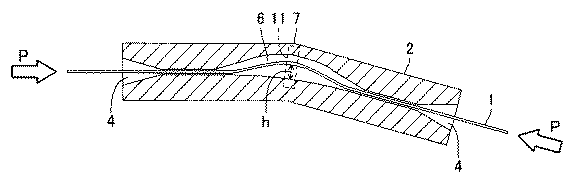
【解決手段】計測装置101は、線状体1が貫通する貫通孔が形成される本体2を備え、線状体1に圧縮力が作用するとき、貫通孔の内部において線状体1が所定の方向へ湾曲し、さらに、貫通孔に光を照射する発光部8と、貫通孔を通過した光を受光する複数個の受光素子を含む受光部11と、受光部11における受光素子の受光量に基づいて受光部11における受光素子の中から複数個の受光素子を選択し、選択した複数個の受光素子の受光量を用いて所定の演算を行なうことにより、線状体1の湾曲度合いを検出する画像処理部12と、検出された湾曲度合いを、線状体1に作用する圧縮力に変換する変換回路13とを備える。
【選択図】図5
Description
[構成および基本動作]
図1は、本発明の第1の実施の形態に係る計測装置の本体の構成を示す外観図である。
次に、計測装置101が線状体1に作用する圧縮力を検出する際の動作について説明する。
本実施の形態は、第1の実施の形態に係る計測装置に対して受光量をフィードバックする構成を追加した計測装置に関する。以下で説明する内容以外は第1の実施の形態に係る計測装置と同様である。
図10を参照して、計測装置102は、計測装置101に対して、さらに制御部15を備える。
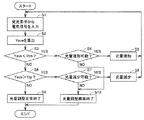
制御部15は、図11のフローチャートに示す光量調整を行なう(S11)。
本実施の形態は、第1の実施の形態に係る計測装置に対して本体にマーカを取り付けた計測装置に関する。以下で説明する内容以外は第1の実施の形態に係る計測装置と同様である。
図13を参照して、計測装置103は、計測装置101に対して、さらにマーカ16を備える。
本実施の形態は、第1の実施の形態に係る計測装置に対してアレイセンサの構成を変更した計測装置に関する。以下で説明する内容以外は第1の実施の形態に係る計測装置と同様である。
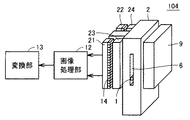
図15を参照して、計測装置104は、計測装置101に対して、アレイセンサ11の代わりにアレイセンサ(受光部)21および22と、セルフォック(登録商標)レンズ10の代わりにセルフォック(登録商標)レンズ23および24とを備える。
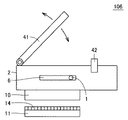
図16は、本発明の第4の実施の形態に係る計測装置の変形例の構成を示す図である。
本実施の形態は、第1の実施の形態に係る計測装置に対して反射板の構成を変更した計測装置に関する。以下で説明する内容以外は第1の実施の形態に係る計測装置と同様である。
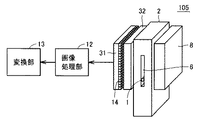
図18を参照して、計測装置106は、計測装置101に対して、反射板9の代わりに反射板41と、固定具42とを備える。アレイセンサ11および光源8と、反射板41とは、貫通孔3を挟んで対向する位置に配置される。
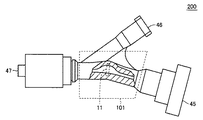
次に、本発明の計測装置を実用化する例として、体内の管の中へ挿入される線状の医療器具である線状体に作用する長手軸方向の圧縮力を計測する計測装置が、他の医療機器に組み込まれて使用される例を示す。
図19を参照して、Yコネクタ(医療装置)200は、計測装置101と、入力ポート45および46と、出力ポート47とを備える。
図20は、本発明の第7の実施の形態に係る訓練装置の構成を示す図である。
Claims (12)
- 可撓性を有する線状体に作用する圧縮力を計測する計測装置であって、
前記線状体が貫通する貫通孔が形成される本体を備え、
前記線状体に前記圧縮力が作用するとき、前記貫通孔の内部において前記線状体が所定の方向へ湾曲し、さらに、
前記貫通孔に光を照射する発光部と、
前記貫通孔を通過した光を受光する複数個の受光素子を含む受光部と、
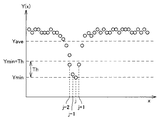
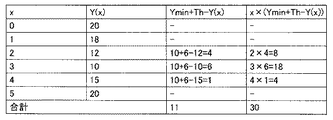
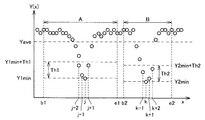
前記受光部における受光素子の受光量に基づいて前記受光部における受光素子の中から複数個の受光素子を選択し、前記選択した複数個の受光素子の受光量を用いて所定の演算を行なうことにより、前記線状体の湾曲度合いを検出する画像処理部と、
前記検出された湾曲度合いを、前記線状体に作用する前記圧縮力に変換する変換回路とを備える計測装置。 - 前記貫通孔は、前記線状体に前記圧縮力が作用していないとき、前記貫通孔の内部において前記線状体が前記所定の方向に湾曲し、前記線状体に前記圧縮力が作用するとき、前記線状体に前記圧縮力が作用していないときと比べて前記線状体が前記所定の方向へさらに湾曲するように形成される請求項1記載の計測装置。
- 前記計測装置は、さらに、
反射部を備え、
前記発光部は、前記反射部に光を照射して反射させることにより前記貫通孔に光を照射する請求項1記載の計測装置。 - 前記反射部は、前記線状体の貫通方向と略垂直な方向から前記貫通孔を視認できる位置に移動可能である請求項3記載の計測装置。
- 前記計測装置は、さらに、
前記受光部における受光素子の受光量に基づいて、前記発光部が照射する光の光量および前記受光部における受光素子の感度のうちの少なくともいずれか一方を調整する制御部を備える請求項1記載の計測装置。 - 前記画像処理部は、さらに、前記受光部における受光素子の受光量に基づいて、前記貫通孔に前記線状体が挿入されているか否かを検出する請求項1記載の計測装置。
- 前記計測装置は、さらに、
前記本体における、前記発光部から前記受光素子に照射される光を遮る位置に取り付けられるマーカを備え、
前記画像処理部は、さらに、前記受光部における受光素子の受光量に基づいて前記マーカの像を認識し、前記演算結果および前記認識したマーカの像に基づいて前記線状体の湾曲度合いを検出する請求項1記載の計測装置。 - 前記画像処理部は、前記受光部における受光素子の受光量に基づいて前記受光部における受光素子の中から複数個の受光素子を選択し、前記選択した複数個の受光素子の受光量を用いて所定の演算を行なうことにより、前記マーカの像を認識し、前記演算結果および前記認識したマーカの像に基づいて前記線状体の湾曲度合いを検出する請求項7記載の計測装置。
- 前記発光部は、前記線状体の貫通方向と略垂直な方向から前記貫通孔を視認できる位置に移動可能である請求項1記載の計測装置。
- 可撓性を有する線状体に作用する圧縮力を計測する計測装置であって、
前記線状体が貫通する貫通孔が形成される本体を備え、
前記線状体に前記圧縮力が作用するとき、前記貫通孔の内部において前記線状体が所定の方向へ湾曲し、さらに、
前記貫通孔に光を照射する発光部と、
前記貫通孔を通過した光を受光する複数個の受光素子を含む受光部と、
前記本体における、前記発光部から前記受光素子に照射される光を遮る位置に取り付けられるマーカとを備え、
前記受光部における受光素子の受光量に基づいて前記線状体の像を認識し、かつ前記受光部における受光素子の受光量に基づいて前記マーカの像を認識し、前記認識した前記線状体の像および前記マーカの像に基づいて前記線状体の湾曲度合いを検出する画像処理部と、
前記検出された湾曲度合いを、前記線状体に作用する前記圧縮力に変換する変換回路とを備える計測装置。 - 請求項1〜10のいずれかに記載の計測装置を備える医療装置。
- 請求項1〜10のいずれかに記載の計測装置を備える訓練装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006190534A JP4895105B2 (ja) | 2006-07-11 | 2006-07-11 | 計測装置ならびにそれを備えた医療装置および訓練装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006190534A JP4895105B2 (ja) | 2006-07-11 | 2006-07-11 | 計測装置ならびにそれを備えた医療装置および訓練装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008020249A true JP2008020249A (ja) | 2008-01-31 |
| JP4895105B2 JP4895105B2 (ja) | 2012-03-14 |
Family
ID=39076305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006190534A Expired - Fee Related JP4895105B2 (ja) | 2006-07-11 | 2006-07-11 | 計測装置ならびにそれを備えた医療装置および訓練装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4895105B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011033985A1 (ja) * | 2009-09-15 | 2011-03-24 | 国立大学法人 名古屋工業大学 | 計測装置、医療装置、訓練装置および計測方法 |
| JP5783904B2 (ja) * | 2009-10-14 | 2015-09-24 | 国立大学法人 名古屋工業大学 | 挿入装置および訓練装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54135944A (en) * | 1978-04-14 | 1979-10-22 | Hitachi Ltd | Operation controlling method of power plant |
| JPS5690147A (en) * | 1979-12-19 | 1981-07-22 | Hitachi Ltd | Roller chain driving apparatus |
| JPH04285839A (ja) * | 1991-03-14 | 1992-10-09 | Nkk Corp | 埋設配管の沈下管理方法 |
| JPH0915072A (ja) * | 1995-06-28 | 1997-01-17 | Casio Comput Co Ltd | 押圧力検出装置 |
-
2006
- 2006-07-11 JP JP2006190534A patent/JP4895105B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54135944A (en) * | 1978-04-14 | 1979-10-22 | Hitachi Ltd | Operation controlling method of power plant |
| JPS5690147A (en) * | 1979-12-19 | 1981-07-22 | Hitachi Ltd | Roller chain driving apparatus |
| JPH04285839A (ja) * | 1991-03-14 | 1992-10-09 | Nkk Corp | 埋設配管の沈下管理方法 |
| JPH0915072A (ja) * | 1995-06-28 | 1997-01-17 | Casio Comput Co Ltd | 押圧力検出装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011033985A1 (ja) * | 2009-09-15 | 2011-03-24 | 国立大学法人 名古屋工業大学 | 計測装置、医療装置、訓練装置および計測方法 |
| US20120174686A1 (en) * | 2009-09-15 | 2012-07-12 | Hideo Fujimoto | Measurement device, medical device, training device, and measurement method |
| JPWO2011033985A1 (ja) * | 2009-09-15 | 2013-02-14 | 国立大学法人 名古屋工業大学 | 計測装置、医療装置、訓練装置および計測方法 |
| EP2479547A4 (en) * | 2009-09-15 | 2014-01-22 | Nat Univ Corp Nagoya Inst Tech | MEASURING DEVICE, MEDICAL DEVICE, TRAINING DEVICE AND MEASURING METHOD |
| JP5783904B2 (ja) * | 2009-10-14 | 2015-09-24 | 国立大学法人 名古屋工業大学 | 挿入装置および訓練装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4895105B2 (ja) | 2012-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4878513B2 (ja) | 可撓性線状体の圧縮力計測装置および方法 | |
| JP4878526B2 (ja) | 可撓性線状体の圧縮力計測装置 | |
| JP6431678B2 (ja) | 挿入形状検出装置 | |
| CN107529939B (zh) | 插拔装置、插入部的直接操作推测方法及非暂时性存储插入部的直接操作推测程序的存储介质 | |
| US11857157B2 (en) | Flexible tube insertion support apparatus, flexible tube insertion apparatus, and flexible tube insertion method | |
| EP2957212A1 (en) | Relative position detection system for tube-like device, and endoscope device | |
| WO2011033985A1 (ja) | 計測装置、医療装置、訓練装置および計測方法 | |
| US20150292974A1 (en) | Calibration device and calibration method for measurement instrument | |
| JP4895105B2 (ja) | 計測装置ならびにそれを備えた医療装置および訓練装置 | |
| CN105050476B (zh) | 插入装置 | |
| JP4963067B2 (ja) | 圧縮力計測装置 | |
| JPH10286221A (ja) | 内視鏡形状検出装置 | |
| JP4905691B2 (ja) | 可撓性線状体の圧縮力計測装置 | |
| JP2008064507A (ja) | 可撓性線状体に作用する力の計測装置および方法 | |
| US11503981B2 (en) | Flexible tube insertion apparatus and flexible tube insertion method | |
| JP2017026348A (ja) | 計測装置および医療機器、医療操作訓練装置 | |
| JP5190869B2 (ja) | 計測装置 | |
| JP2007202675A (ja) | センサならびにそれを備えた医療装置および訓練装置 | |
| JP2014073318A (ja) | 変換アダプタ、計測ユニット、医療装置および訓練装置 | |
| JP2003052615A (ja) | 可撓性電子内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111116 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111214 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4895105 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |