JP2007301902A - 液体吐出システム、液体吐出装置、及び液体吐出方法 - Google Patents
液体吐出システム、液体吐出装置、及び液体吐出方法 Download PDFInfo
- Publication number
- JP2007301902A JP2007301902A JP2006134199A JP2006134199A JP2007301902A JP 2007301902 A JP2007301902 A JP 2007301902A JP 2006134199 A JP2006134199 A JP 2006134199A JP 2006134199 A JP2006134199 A JP 2006134199A JP 2007301902 A JP2007301902 A JP 2007301902A
- Authority
- JP
- Japan
- Prior art keywords
- nozzles
- nozzle group
- nozzle
- state
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Ink Jet (AREA)
Abstract
【課題】画像幅に応じたノズルの配置になるようにヘッドを移動させることができる液体吐出システムを提供すること。
【解決手段】提供する液体吐出システムは、第1ノズル群と、ノズルの並ぶ方向に移動可能な第2ノズル群と、を備える。また、液体吐出システムは、ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群のノズルが位置する第1状態にもなり、第2ノズル群の位置が第1ノズル群の位置に対してノズルの並ぶ方向にずれており、かつ、ノズルの並ぶ方向について第2ノズル群の端のノズルが第1ノズル群のいずれかのノズルと所定のノズルピッチだけ離れている第2状態にもなるように、第2ノズル群を移動させる移動機構を備える。さらに、液体吐出システムは、画像のノズルが並ぶ方向の長さに応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるように移動機構を制御する制御部を備える。
【選択図】図3
【解決手段】提供する液体吐出システムは、第1ノズル群と、ノズルの並ぶ方向に移動可能な第2ノズル群と、を備える。また、液体吐出システムは、ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群のノズルが位置する第1状態にもなり、第2ノズル群の位置が第1ノズル群の位置に対してノズルの並ぶ方向にずれており、かつ、ノズルの並ぶ方向について第2ノズル群の端のノズルが第1ノズル群のいずれかのノズルと所定のノズルピッチだけ離れている第2状態にもなるように、第2ノズル群を移動させる移動機構を備える。さらに、液体吐出システムは、画像のノズルが並ぶ方向の長さに応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるように移動機構を制御する制御部を備える。
【選択図】図3
Description
本発明は、液体吐出システム、液体吐出装置、及び液体吐出方法に関する。
液体吐出装置としてのラインヘッドプリンタには、液体滴を吐出させるためのヘッドを複数有するものがある。このような液体吐出装置の中にはヘッドと媒体の相対移動方向の直交方向に複数のヘッドを移動させることができる液体吐出装置がある。そして、一方のヘッドのノズル間にもう一方のヘッドのノズルが入る構成となるようにヘッドを移動させたり、一方のヘッドと他方のヘッドとが紙幅方向に並ぶような構成になるようにヘッドを移動させたりするラインヘッドプリンタが公開されている。
特開平6−219009号公報
特開平2−175166号公報
液体吐出装置としてのラインヘッドプリンタでは、印刷される画像の大きさによってはヘッドが一度に印刷できる領域を広くしないと印刷を行えないときと、一度に印刷できる領域を狭くしつつ高解像度で印刷を行えるときがある。そのときヘッドの配置を変化させることにより、一台のプリンタで、これらの目的に合わせた動作を使い分けることができれば便利である。例えば、一台のラインヘッドプリンタにおいて、印刷幅を考慮して媒体に対して一度に広い領域にドットを形成したり、狭い領域について高解像度でドットを形成することができるようなヘッド配置を作り出せれば便利である。
本発明は、このような事情に鑑みてなされたものであり、形成すべき画像に応じて媒体に対してドットを形成するときの条件に適したノズル配置になるようにノズル列を移動させることができる液体吐出システムを提供することを目的とする。
上記目的を達成するための主たる発明は、
媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
を備える液体吐出システムである。
媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
を備える液体吐出システムである。
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
本明細書及び添付図面の記載により、少なくとも、以下の事項が明らかとなる。
媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
を備える液体吐出システム。
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
を備える液体吐出システム。
このようにすることで、液体滴を吐出するときにおいて、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。
かかる液体吐出システムであって、前記媒体と前記第1ノズル群との位置を前記ノズルの並ぶ方向の垂直方向に相対的に移動させる相対移動機構をさらに備えることが望ましい。また、前記相対移動機構は、前記第2状態のときにおける前記媒体と前記第1ノズル群の相対移動速度を、前記第1状態のときにおける相対移動速度よりも速くすることが望ましい。前記相対移動機構は、前記媒体を前記ノズルの並ぶ方向の垂直方向に搬送させる媒体搬送機構であることが望ましい。尚、前記相対移動機構は、前記第1ノズル群と第2ノズル群を前記ノズルの並ぶ方向の垂直方向に移動させるノズル群移動機構であってもよい。また、前記第1状態は、前記ノズルの並ぶ方向において、前記第1ノズル群のノズル間の中央に前記第2ノズル群のノズルが位置する状態であることが望ましい。また、前記移動機構は、前記第2ノズル群を前記ノズルの並ぶ方向に移動させるためのボールネジを備えることが望ましい。また、前記第1状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットと、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットは、前記ノズルの並ぶ方向に交互に並ぶように形成され、前記第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドット列と、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドット列は、前記ノズルの並ぶ方向に並ぶように形成されることが望ましい。また、前記第1状態のとき及び第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成されるとともに、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成され、前記第2状態のときにおける前記垂直方向のドットの間隔は、前記第1状態のときにおける前記垂直方向のドットの間隔よりも大きいことが望ましい。また、前記制御部は、前記画像を形成するためのデータに基づいて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御することが望ましい。また、前記制御部は、前記ノズルが並ぶ方向の長さについて、前記画像の長さが前記第1ノズル群の長さ以下のときには、前記第2ノズル群の位置を前記第1状態にし、前記画像の長さが前記第1ノズル群の長さよりも大きいときには、前記第2ノズル群の位置を前記第2状態にすることが望ましい。また、前記ノズルが並ぶ方向の長さについての前記画像の長さは、前記画像を形成するためのデータに基づいて求められることが望ましい。また、前記画像を形成するためのデータは、画素にドットを形成するか否かを表すデータであることが望ましい。
このようにすることで、液体滴を吐出するときにおいて、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。
このようにすることで、液体滴を吐出するときにおいて、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。
液体滴を吐出して形成するべき画像のノズルが並ぶ方向の長さが所定の長さよりも小さいとき、前記ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群の前記ノズルが位置する第1状態にするように、前記第2ノズル群を移動させ、前記液体滴を吐出させるステップと、
前記液体滴を吐出して形成するべき画像のノズルが並ぶ方向の長さが所定の長さ以上であるとき、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にするように、前記第2ノズル群を前記ノズルが並ぶ方向に移動させ、前記液体滴を吐出させるステップと、
を含む液体吐出方法。
このようにすることで、液体滴を吐出するときにおいて、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。
前記液体滴を吐出して形成するべき画像のノズルが並ぶ方向の長さが所定の長さ以上であるとき、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にするように、前記第2ノズル群を前記ノズルが並ぶ方向に移動させ、前記液体滴を吐出させるステップと、
を含む液体吐出方法。
このようにすることで、液体滴を吐出するときにおいて、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。
===第1実施形態===
<全体構成について>
図1は、第1実施形態における印刷システムの全体構成のブロック図である。この印刷システム100は、プリンタ1、コンピュータ110、表示装置120、及び入力装置130を備えている。第1実施形態において、プリンタ1は、紙、布、フィルム等の媒体に画像を印刷するインク吐出型のラインプリンタである。このプリンタ1の構成については、後に詳述する。
<全体構成について>
図1は、第1実施形態における印刷システムの全体構成のブロック図である。この印刷システム100は、プリンタ1、コンピュータ110、表示装置120、及び入力装置130を備えている。第1実施形態において、プリンタ1は、紙、布、フィルム等の媒体に画像を印刷するインク吐出型のラインプリンタである。このプリンタ1の構成については、後に詳述する。
コンピュータ110は、CPU113、メモリ114、インタフェース112、及び記録再生装置140を備えている。CPU113は、プリンタドライバなどの様々なプログラムを実行し、例えば後述するプリンタ1に印刷させる画像について画像処理を行う。メモリ114は、プリンタドライバなどのプログラムやデータを記憶する。インタフェース112は、USBやパラレルインタフェースなどのプリンタ1に接続するためのインタフェースである。記録再生装置140は、CD−ROMドライブやハードディスクドライブであって、プログラムやデータを記憶するための装置である。
コンピュータ110は、インタフェース112を介してプリンタ1と通信可能に接続されており、プリンタ1に画像を印刷させるため、印刷させる画像に応じた印刷データをプリンタ1に出力する。
コンピュータ110には、プリンタドライバがインストールされている。プリンタドライバは、表示装置120にユーザインタフェースを表示させ、アプリケーションプログラムから出力された画像データを印刷データに変換させるためのプログラムである。このプリンタドライバは、記録再生装置140としてのCD−ROMドライブからインストールすることもできるし、インターネットを介してインストールすることもできる。プリンタドライバは、各種の機能を実現するためのコードから構成されている。
尚、「液体吐出装置」は、媒体に液体滴を吐出する装置を意味し、例えばプリンタ1が該当する。また、「液体吐出システム」は、プリンタ1とコンピュータ110とで構成される印刷システムが該当する。
<プリンタ1の全体構成について>
図2Aは、第1実施形態におけるプリンタ1の断面図である。また、図2Bは、第1実施形態におけるプリンタ1の用紙Sの搬送処理を説明するための斜視図である。以下に、図1も参照しつつ、第1実施形態のプリンタであるラインプリンタの基本的な構成について説明する。
図2Aは、第1実施形態におけるプリンタ1の断面図である。また、図2Bは、第1実施形態におけるプリンタ1の用紙Sの搬送処理を説明するための斜視図である。以下に、図1も参照しつつ、第1実施形態のプリンタであるラインプリンタの基本的な構成について説明する。
第1実施形態のプリンタ1は、用紙搬送機構20、ヘッドユニット40、検出器群50、ASIC60、及び駆動信号生成回路70を有する。プリンタ1は、コンピュータ110から印刷データを受信する。そして、受信したデータに基づいてプリンタ1のASIC60がプリンタ1の各部(用紙搬送機構20、ヘッドユニット40、駆動信号生成回路70)を制御し、用紙Sに画像を印刷する。
プリンタ1内の状況は検出器群50によって監視されている。検出器群50は、検出結果をASIC60に出力する。そして、ASIC60は、この検出結果に基づいて、各部を制御する。
プリンタ1内の状況は検出器群50によって監視されている。検出器群50は、検出結果をASIC60に出力する。そして、ASIC60は、この検出結果に基づいて、各部を制御する。
用紙搬送機構20は、媒体(例えば、用紙Sなど)を所定の方向(以下、搬送方向という)に搬送させるためのものである。この用紙搬送機構20は、給紙ローラ21と、搬送モータ(不図示)と、上流側搬送ローラ23A及び下流側搬送ローラ23Bと、ベルト24とを有する。給紙ローラ21は、用紙挿入口に挿入された用紙Sをプリンタ内に給紙するためのローラである。不図示の搬送モータが回転すると、上流側搬送ローラ23A及び下流側搬送ローラ23Bが回転しベルト24が回転する。給紙ローラ21によって給紙された用紙Sは、ベルト24によって、印刷可能な領域(ヘッドと対向する領域)まで搬送される。ベルト24が用紙Sを搬送することによって、用紙Sがヘッドユニット40に対して搬送方向に移動する。印刷可能な領域を通過した用紙Sは、ベルト24によって外部へ排紙される。尚、搬送中の用紙Sは、ベルト24に静電吸着又はバキューム吸着されている。
ヘッドユニット40は、用紙Sにインク滴を吐出するためのものである。ヘッドユニット40は、搬送中の用紙Sに対してインク滴を吐出することによって、用紙Sにドットを形成し、画像を用紙Sに印刷する。第1実施形態におけるプリンタ1はラインプリンタであり、ヘッドユニット40は後述するように第1ヘッド410〜第6ヘッド460の6つのヘッドを有している。ヘッドユニット40は、第4ヘッド440、第5ヘッド450、及び第6ヘッド460をノズルの並ぶ方向(列方向)に移動させることができるヘッド移動機構490を含んでいる。このヘッドユニット40の構成、ヘッドユニット40に含まれるヘッド移動機構490、及び第1ヘッド410〜第6ヘッド460の構成については、後に詳述する。
検出器群50には、ロータリー式エンコーダ(不図示)、紙検出センサ53などが含まれる。ロータリー式エンコーダは、上流側搬送ローラ23Aや下流側搬送ローラ23Bの回転量を検出する。ロータリー式エンコーダの検出結果に基づいて、ASIC60は、用紙Sの搬送量を検出することができる。紙検出センサ53は、給紙中の紙の先端の位置を検出する。
ASIC60は、プリンタ1の制御を行うための制御ユニットである。ASIC60は、プリンタ1内のインタフェース部61に接続され、コンピュータ110と通信可能になっている。ASIC60は、プリンタ全体の制御を行うための演算処理を行う機能を有する。また、プログラム及びデータを記憶するメモリを含んでいる。そして、メモリに格納されているプログラムに従って、各機構を制御する。
駆動信号生成回路70は、インク滴をノズルから吐出させるために、後述するヘッド内のピエゾ素子417に印加される駆動信号を生成する回路である。駆動信号生成回路70は、ASIC60から出力された波形データに基づいて、駆動信号をヘッドユニット40に出力する。駆動信号については後に説明する。
<ヘッドユニット40の構成について>
図1に示すように、ヘッドユニット40には、第1ヘッド410〜第6ヘッド460の6つのヘッドが含まれている。そして、それぞれのヘッドには、後述するように360個のノズルと、このノズルからインク滴を吐出させるためのピエゾ素子417が含まれている。ピエゾ素子417は、一つ一つのノズルに独立したものが取り付けられている。また、ヘッド制御部HCの制御により各ノズルのピエゾ素子417に印加される駆動パルスが選択される。そして、駆動パルスがピエゾ素子417に印加されることにより、個々のノズルからインク滴が吐出される。
図1に示すように、ヘッドユニット40には、第1ヘッド410〜第6ヘッド460の6つのヘッドが含まれている。そして、それぞれのヘッドには、後述するように360個のノズルと、このノズルからインク滴を吐出させるためのピエゾ素子417が含まれている。ピエゾ素子417は、一つ一つのノズルに独立したものが取り付けられている。また、ヘッド制御部HCの制御により各ノズルのピエゾ素子417に印加される駆動パルスが選択される。そして、駆動パルスがピエゾ素子417に印加されることにより、個々のノズルからインク滴が吐出される。
図3A及び図3Bは、プリンタ1において、ヘッドユニット40における6つのヘッド(第1ヘッド410〜第6ヘッド460)の配置について説明するための図である。ここでは、図3Aのヘッドの配置状態を第1状態する。また、図3Bのヘッドの配置状態を第2状態とする。
また、図3Aの用紙Sには、説明の便宜上、これから印刷される画像P1が示されている。また、図3Bの用紙Sにも、説明の便宜上、これから印刷される画像P2が示されている。
プリンタ1内において、用紙Sの搬送方向の垂直方向が第1ヘッド410〜第6ヘッド460のノズル列の方向になるように配置されている。ここでは、第1ヘッド410〜第3ヘッド430の位置は固定されている。一方、第4ヘッド440〜第6ヘッド460はノズル列方向に移動可能となっている。尚、第1ヘッド410〜第3ヘッド430のノズルは、第1ノズル群に相当し、第4ヘッド440〜第6ヘッド460は第2ノズル群に相当する。
ヘッドユニット40には、第4ヘッド440、第5ヘッド450、及び第6ヘッド460をノズル列方向に移動させるためのヘッド移動機構490が含まれている。ヘッド移動機構490は、ボールネジ445,455,465、このボールネジを回転させるためのボールネジ回転用モータ(不図示)、及び軸受け447,457,467を含む。また、ヘッド移動機構490は、第4ヘッド440〜第6ヘッド460の位置情報を取得するためのリニアエンコーダ(不図示)、及びリニアエンコーダからの位置情報に基づいてボールネジ回転用モータを制御するための制御装置としてのASIC60を含む。尚、このヘッド移動機構490は、第2ノズル群をノズル列方向に移動させる移動機構に相当する。
第4ヘッド440、第5ヘッド450、及び第6ヘッド460は、ボールネジ445,455,465が回転することによってノズルが並ぶノズル列方向に移動可能になっている。図に示すように、ボールネジ445,455,465の右端部には、それぞれボールネジ回転用モータ446,456,466が取り付けられている。また、ボールネジ445,455,465の左端部には、それぞれのボールネジを回転可能に受けるための軸受け447,457,467が配置されている。
ヘッド移動機構490の一部としてのASIC60は、リニアエンコーダからの出力であるヘッドの位置情報を取得する。そして、ヘッド移動機構490は、各ヘッドについて後述する第1状態又は第2状態の目標位置になるように、ボールネジ回転用モータ446,456,466の回転を制御する機能を有する。
最初に第1状態における第1ヘッド410〜第6ヘッド460の配置の概略について説明する。第1状態において、第4ヘッド440は、第1ヘッド410と用紙Sの搬送方向について大部分が重なり、第4ヘッド440のノズルが第1ヘッド410のノズル間の中央にくるように配置される。また、第5ヘッド450は、第2ヘッド420と用紙Sの搬送方向について大部分が重なり、第5ヘッド450のノズルが第2ヘッド420のノズル間の中央にくるように配置される。また、第6ヘッド460は、第3ヘッド430と用紙Sの搬送方向について大部分が重なり、第6ヘッド460のノズルが第3ヘッド430のノズル間の中央にくるように配置される。
このような構成にして、第1ヘッド410〜第6ヘッド460のノズルからインク滴を吐出することによって、用紙Sの幅の約1/2の領域(ほぼ3ヘッド分の領域)にドットを形成することができるようになっている。そして、用紙Sを用紙Sの搬送方向に移動させながら、第1ヘッド410〜第6ヘッド460からインク滴を吐出することで用紙Sの幅の約1/2の領域にわたって画像を形成することができるようになっている。各ヘッドの列方向におけるサイズは約1インチ(約2.54cm)であるので、このとき約3インチ(約7.62cm)の紙幅方向の画像形成が可能となる。尚、後に詳述するが、第1実施形態では図に示すように、画像P1の最右端の画素の位置X_PICがノズルの最右端の位置X_HEAD以内の大きさのときにおいて第1状態での印刷を可能としている。
次に、第2状態における第1ヘッド410〜第6ヘッド460の配置の概略について説明する。第2状態において、用紙Sの搬送方向について、各ヘッドは他のヘッドとヘッドの端部を除いて重ならないように配置される。そして、図の左から順に、第1ヘッド410、第2ヘッド420、第3ヘッド430、第4ヘッド440、第5ヘッド、及び第6ヘッド460が並ぶように配置される。
このような構成にして、第1ヘッド410〜第6ヘッド460のノズルからインク滴を吐出することによって、用紙Sの紙幅方向についてドットを形成することができるようになっている。そして、用紙Sを用紙Sの搬送方向に移動させながら、第1ヘッド410〜第6ヘッド460からインク滴を吐出することで用紙Sの全面にわたって画像を形成することができるようになっている。各ヘッドの列方向におけるサイズは約1インチ(約2.54cm)であるので、このとき約6インチ(約15.24cm)の紙幅方向の画像形成が可能となる。尚、後に詳述するが、第1実施形態において、図に示すように、画像P2の最右端の画素の位置X_PICが第1状態のときのノズルの最右端の位置X_HEADよりも大きい場合には、第2状態にして印刷を行えるようにしている。
図4は、第1状態におけるヘッドユニット40の6つのヘッドの詳細な配置を説明するための図である。図4では、ヘッドユニット40における第1ヘッド410〜第6ヘッド460をプリンタ1の上から見た図となっている。プリンタ1の上部から見た場合、これらヘッドのノズルは他の要素に阻まれて見ることができない。しかし、ここでは、第1ヘッド410のノズル〜第6ヘッド460のノズルとの位置関係が理解しやすいように、ノズルの位置が実線で描かれている。尚、後述するようにプリンタ1が高解像度モードで印刷を行うときには、ヘッドは第1状態になるように移動される。
各ヘッドには、ブラックインクノズル列K、シアンインクノズル列C、マゼンタインクノズル列M、及びイエローインクノズル列Yが形成されている。各ノズル列は、インクを吐出するための吐出口であるノズルを複数個(第1実施形態では、360個)備えている。各ノズル列の複数のノズルは、紙幅方向に沿って、一定のノズルピッチで並んでいる。ここでは、ノズルピッチは、1/360インチである。各ヘッドのノズルには、図中の左から順に番号が付されている(#1〜#360)。尚、「ノズルピッチ」とは、ノズルの並ぶノズル列方向におけるノズル間距離である。また、図中において、ノズルピッチは「P」(ここでは、Pは1/360インチ)で示される。
第1状態において、ノズル列の方向について、第1ヘッド410のノズル間の中央に第4ヘッド440のノズルがくるように配置されている。より詳細には、ノズル列の方向について第1ヘッド410のノズル#1とノズル#2との間の中央に第4ヘッド440のノズル#1がくるように配置されている。同様に、ノズル列の方向について、第2ヘッド420のノズル間の中央に第5ヘッド450のノズルがくるように配置されている。より詳細には、ノズル列の方向について第2ヘッド420のノズル#1とノズル#2との間の中央に第5ヘッド450のノズル#1がくるように配置されている。また、ノズル列の方向について、第3ヘッド430のノズル間の中央に第6ヘッド460のノズルがくるように配置されている。より詳細には、ノズル列の方向について、第3ヘッド430のノズル#1とノズル#2の間に第6ヘッドのノズル#1がくるように配置されている。
第1ヘッド410の右端のノズル(#360)と第2ヘッドの左端のノズル(#1)とで構成されるノズルピッチは1/360インチである。第2ヘッド420の右端のノズル(#360)と第3ヘッド430の左端のノズル(#1)とで構成されるノズルピッチは1/360である。また第4ヘッド440の右端のノズル(#360)と第5ヘッドの左端のノズル(#1)とで構成されるノズルピッチは1/360インチである。また、第5ヘッド450の右端のノズル(#360)と第6ヘッド460の左端のノズル(#1)とで構成されるノズルピッチは1/360インチである。
第4ヘッド440の右端のノズル(#360)と第2ヘッド420の左端のノズル(#1)とで構成されるノズルピッチは1/720インチ(P/2)である。第5ヘッド450の右端のノズル(#360)と第3ヘッド430の左端のノズル(#1)とで構成されるノズルピッチは1/720(P/2)である。
このように配置されることによって、第1ヘッド410と第2ヘッド420と第3ヘッド430とで構成される第1ノズル群のノズルピッチは1/360インチとなる。また、第4ヘッド440と第5ヘッド450と第6ヘッド460とで構成される第2ノズル群のノズルピッチは1/360インチとなる。そして、第2ノズル群のノズルは、ノズル列の方向について、第1ノズル群のノズルの間にくるように配置されるので、第1ノズル群のノズルと第2ノズル群のノズルとで構成されるノズルピッチは1/720インチ(P/2)となる。
第2状態に移行するときにおいて、ASIC60からの制御でボールネジ回転用モータ446,456,466が回転させられることにより、ボールネジ445,455,465が回転させられる。そして、第4ヘッド440〜第6ヘッド460が図中の右側に移動させられる。この状態が第2状態である。
図5は、第2状態におけるヘッドユニット40の6つのヘッドの詳細な配置を説明するための図である。尚、後述するようにプリンタ1が幅広印刷モードで印刷を行うときには、ヘッドは第2状態になるように移動される。
第2状態において、第1ヘッド410の右端のノズルと第2ヘッド420の左端のノズルとで構成されるノズルピッチは、1/360インチになるようにされている。同様に、第2ヘッド420の右端のノズルと第3ヘッドの左端のノズルとで構成されるノズルピッチも1/360インチになるようにされている。第3ヘッド430の右端のノズルと第4ヘッド440の左端のノズルとで構成されるノズルピッチも1/360インチになるようにされている。第4ヘッド440の右端のノズルと第5ヘッドの左端のノズルとで構成されるノズルピッチも1/360インチになるようにされている。第5ヘッド450の右端のノズルと第6ヘッド460の左端のノズルとで構成されるノズルピッチも1/360インチになるようにされている。
このように配置されることによって、第1ノズル群のノズルと第2ノズル群のノズルとで構成される全てのノズル間のノズルピッチは、1/360インチとなる。
上述の実施形態において、第4ヘッド440〜第6ヘッド460は、それぞれに取り付けられたボールネジ445,455,465によって移動させられたが、第4ヘッド440〜第6ヘッド460を1つのユニットとしてまとめ、一つのボールネジの回転によってこの1つのユニットを移動させることとしてもよい。このようにすることで、第4ヘッド440〜第6ヘッド460を第2ノズル群としてノズル列方向に第1状態又は第2状態になるように移動させることができる。
<最右端の画素の位置の特定について>
用紙Sに印刷を行う前に、コンピュータ110は、プリンタ1に上述の第1状態及び第2状態のいずれの状態で印刷を行わせるべきかを判定する。そのために、印刷される画像の画像データに基づいて、画像の最右端にある画素の位置を特定し、この位置の画素について第1状態におけるノズルで印刷をすることができるか否かについて判定を行う。以下に、最右端の画素の位置の特定手法、及び、この判定方法について説明を行う。
用紙Sに印刷を行う前に、コンピュータ110は、プリンタ1に上述の第1状態及び第2状態のいずれの状態で印刷を行わせるべきかを判定する。そのために、印刷される画像の画像データに基づいて、画像の最右端にある画素の位置を特定し、この位置の画素について第1状態におけるノズルで印刷をすることができるか否かについて判定を行う。以下に、最右端の画素の位置の特定手法、及び、この判定方法について説明を行う。
図6は、第1実施形態において、用紙Sに形成されるであろう画像を形成するドットと、各ヘッドのノズルとの関係について説明するための図である。図には、第1ノズル群としての第1ヘッド410〜第3ヘッド430と第2ノズル群としての第4ヘッド440〜第6ヘッド460が第1状態で配置されている。また、用紙S上にはこれから形成されるであろうドットが画素単位で記載されている。また、ここでは、ノズルと形成されるであろうドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、図には同様の理由によりノズル数も減らし、さらに用紙S上の画素数も減らして記載されている。
まず、コンピュータ110は、実行中のアプリケーションソフトなどから画像の印刷命令及び画像データを受け取ると、その画像に応じた印刷データを生成する。この印刷データは、コンピュータ110がプリンタドライバを実行することによって以下のようにして生成される。
コンピュータ110は、画像データを受け取ると、この画像について解像度の変換処理を行う。ここでは、第1状態において印刷を行うために720dpiの解像度になるように画像の解像度の変換処理が行われる。次に、コンピュータ110は、解像度の変換処理がされた画像データについてハーフトーン処理を行う。ハーフトーン処理は、画像データを画素ごとに、ドット無し、小ドット、中ドット、大ドットのいずれのサイズであるかを示すデータに変換する処理である。尚、ここでは説明の簡単のために、ハーフトーン処理後のデータにはドット無し又は大ドットの2種類しかないものとして説明を行う。
このようにハーフトーン処理が行われると、用紙S上の画素ごとにドットを形成するか否かの画素データが生成されることとなる。図には、この画素データに基づき用紙Sの各画素にドットを形成するか否かが示されている。ここでは、ドットが形成される画素には黒丸が記載され、ドットが形成されない画素には何も記載されていない。
このように用紙Sの画素にドットを形成するか否かを特定できるようになると、コンピュータ110は、ドットが形成される画素の最右端の位置(ここでは、最右端位置X_PICとする)を特定する。また、第1状態における第1ヘッド410〜第6ヘッド460のノズルによってドットの形成が可能な最右端の位置(ここでは、ドット形成可能位置X_HEAD)があらかじめ特定されている(図6では、X_HEADは24となっている)。
最右端位置X_PICの特定方法は例えば次のようにして行われる。前述のハーフトーン処理によって、用紙S上のどの画素にドットを形成するか否かを示す画素データが生成されている。コンピュータ110は、この画素データに基づいて、図6に示すように用紙Sに形成されるであろうドットが特定する。用紙Sに形成されるであろうドットが特定されると、用紙Sの幅方向についてドットが存在する画素の最右端の位置を特定することができるようになる。よって、コンピュータ110は、用紙Sの最上端から最下端までについて調査し、ドットが存在する画素の最右端位置X_PICを特定する。図6において、最右端位置X_PICは26となっている。
コンピュータ110は、このようにして特定した最右端位置X_PICと、第1状態におけるドット形成可能位置X_HEADとを比較する。そして、最右端位置X_PICがドット形成可能位置X_HEADよりも大きいとき、コンピュータ110は、第1状態では画像を印刷できないものと判定し、プリンタ1に第2ノズル群を第2状態の位置にするように指示する。このときコンピュータ110は、720dpi(第1状態)で印刷することができないと判定し、再度アプリケーションソフトから受け取った画像データについて360dpiに変換する解像度変換処理を行う。
図7A及び図7Bは、解像度変換処理の一例を説明するための図である。例えば、720dpiの解像度から360dpiの解像度へと画像を変換する場合について考える。図7A及び図7Bには、720dpiにおける4つの画素と、360dpiにおける1つの画素が示されている。720dpiから360dpiへと解像度を変換するとき、コンピュータ110は、720dpiにいくつのドットが含まれているかについて判定する。そして、含まれているドットの数が3以上のときには、360dpiの画素にドットを形成するように変換する。一方、含まれているドットの数が2以下のときには、360dpiの画素にドットを形成しないように変換する。この方法は、最も単純な変換方法であるが、そのため高速で解像度の変換を行うことができる。
また、720dpiの各画素の階調(ドット無し、小ドット、中ドット、大ドット)についても考慮に入れることができる。例えば、階調値として、ドット無しを0、小ドットを1、中ドットを2、大ドットを3として4つの画素の階調値の和を求め、この値が所定の値よりも大きいときには、360dpiの画素にドットを形成する、または、これに対応する階調のドットを形成するようにすることもできる。
このようにして解像度変換処理が行われると、コンピュータ110は、解像度変換処理された画像データについてラスタライズを行って生成された印刷データをプリンタ1に送る。ここで、ラスタライズ処理とは、ノズルがインク滴を吐出する順序になるようにデータを並び替える処理である。プリンタ1は、この印刷データに基づいて印刷を行う。
一方、最右端位置X_PICが第1状態におけるドット形成可能位置X_HEAD以下のとき、コンピュータ110は、第1状態で印刷を行うことができるものと判定する。そして、コンピュータ110は、ハーフトーン処理を行ったデータをラスタライズ処理して、このラスタライズ処理して生成された印刷データをプリンタ1に送る。プリンタ1は、このようにして生成された印刷データに基づいて印刷を行う。
一般に形成するべき画像の幅方向の長さが長いほど最右端位置X_PICも大きくなる。また、ここでは、形成するべき画像の幅方向の長さに応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490が制御される。つまり、形成するべき画像の幅方向の長さを考慮するコンピュータ110のCPU113と、第2ノズル群の位置を第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490を制御するASIC60は、制御部に相当する。
尚、上述のコンピュータ110のCPU113の機能をプリンタ1のASIC60に持たせることとしてもよい。この場合、プリンタ1のASIC60が制御部に相当する。
<駆動信号とドットの形成について>
第1実施形態では、駆動信号に含まれる駆動パルスが選択的にピエゾ素子417に印加される。そして、ヘッド内のインク滴が吐出される。
第1実施形態では、駆動信号に含まれる駆動パルスが選択的にピエゾ素子417に印加される。そして、ヘッド内のインク滴が吐出される。
このような駆動信号は次のようにして生成される。まず、駆動信号生成回路70がASIC60から駆動信号の波形データを受け取る。駆動信号生成回路70は、この波形データをD/A変換し、アナログの電圧信号に変換する。そして、この電圧信号について、所定の電圧になるように電圧増幅を行い、また、所定量のピエゾ素子417を十分駆動できるように電流増幅を行う。このようにして、駆動信号は生成される。
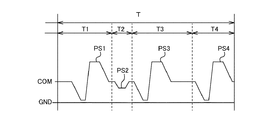
図8は、使用される駆動信号の一例である。駆動信号COMは、周期Tの繰り返し周期で駆動信号生成回路70から出力される。周期Tには、T1〜T4の期間が含まれている。そして、期間T1には第1駆動パルスPS1、期間T2には第2駆動パルスPS2、期間T3には第3駆動パルスPS3、期間T4には第4駆動パルスPS4が含まれている。尚、駆動パルスの形状は、第2駆動パルスPS2のみが他の駆動パルスと異なっており、駆動パルスPS1、PS3、及びPS4は同じ形状となっている。
駆動パルスPS2は、ドットを形成しないときにおいて、ピエゾ素子417を微振動させ、インクを撹拌することでインクの増粘を防止するために使用されるパルスである。駆動パルスPS1、PS3、及びPS4は、インク滴をノズルから吐出させるための駆動パルスである。プリンタ1は、これら駆動パルスのピエゾ素子417への印加の組み合わせにより、小ドット、中ドット、及び大ドットを形成する。
例えば、小ドットを形成するときは、第3駆動パルスPS3をピエゾ素子417に印加して期間Tにおいて1つの液体滴を吐出させる。また、中ドットを形成するときは、第3駆動パルスPS3、第4駆動パルスPS4をピエゾ素子417に印加して期間Tにおいて2つの液体滴を吐出させる。大ドットを形成するときには、駆動パルスPS1、PS3、及びPS4をピエゾ素子417に印加して期間Tにおいて3つの液体滴を吐出させる。このように、期間Tにおける駆動パルスを選択的にピエゾ素子417に印加することによって、複数のサイズのドットを形成することができる。
ASIC60は、コンピュータ110から送信された印刷データに基づいて画素データSIを生成する。そして、この画素データSIに基づいてヘッド制御部HCは各ピエゾ素子417に印加される駆動パルスを選択する。
第1実施形態において駆動信号は2種類用意される。一つは、高解像度モードで印刷を行うときに使用される第1駆動信号COM_1であり、もう一つは、幅広印刷モードで印刷を行うときに使用される第2駆動信号COM_2である。
第1実施形態において、第1駆動信号COM_1は、例えば図5に示す駆動信号COMである。また、第2駆動信号COM_2は、駆動パルスPS1、PS3、及びPS4の波形の振幅が、第1駆動信号COM_1のものよりも大きく設定されている駆動信号である。このようにすることで、第2駆動信号COM_2の駆動パルスをピエゾ素子417に印加したときの方が第1駆動信号COM_1の駆動パルスをピエゾ素子417に印加したときよりも大きいインク滴を吐出させることができ、より大きいドットを形成することができる。尚、第1駆動信号COM_1の繰り返し周期と第2駆動信号COM_2の繰り返し周期はともにTである。
<動作について>
次に、第1実施形態におけるプリンタ1の印刷動作について説明する。ここでは、高解像度モードでの印刷動作と幅広印刷モードでの印刷動作について説明する。高解像度モードで印刷を行うか幅広印刷モードで印刷を行うかは、前述の方法によって画像のデータに基づいてコンピュータ110によって判定され選択される。
次に、第1実施形態におけるプリンタ1の印刷動作について説明する。ここでは、高解像度モードでの印刷動作と幅広印刷モードでの印刷動作について説明する。高解像度モードで印刷を行うか幅広印刷モードで印刷を行うかは、前述の方法によって画像のデータに基づいてコンピュータ110によって判定され選択される。
ここでは、最初に高解像度モードでの印刷動作について説明する。よって、最初に印刷される画像は、第1状態における第1ヘッド410〜第6ヘッド460の長さの範囲に入っている画像である。尚、ここでは、説明のため印刷される画像の全画素に大ドットを形成するものとして説明を行う。但し、印刷される画像によっては、ドットの形成されない画素もある。
印刷するべき画像データがアプリケーションからプリンタドライバに送られると、コンピュータ110は、上述の最右端位置の特定方法により、画像を第1状態で印刷可能であるか否かについて判定を行う。そして、第1状態で印刷可能であると判定されるとき、高解像度モードでの印刷が行われる。
図9は、第1実施形態における高解像度モードで印刷を行うときのヘッドの配置について説明するための図である。図9では、ヘッドと形成されるドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、図9では、同様の理由によりノズル数も減らして記載されている。第1ノズル群のヘッド(ここでは、第1ヘッド410)からインク滴が吐出され形成されたドットは、円形内に「1」が記載されている。また、第2ノズル群のヘッド(ここでは、第4ヘッド440)からインク滴が吐出され形成されたドットは、円形内に「2」が記載されている。
第1実施形態の高解像度モードのときにおいて、第2ノズル群は、上述の通り第1状態になるように移動させられている。つまり、第1ノズル群のノズル間の中央に第2ヘッド群のノズルが位置するようになる。ここでは、代表として第1ヘッド410のノズルと第4ヘッド440のノズルの配置が示されている。
第1実施形態において用紙Sはノズル列と垂直方向に連続的に搬送される。そして、ヘッドから吐出されたインク滴によってドットが形成され印刷が行われる。高解像度モードにおいて、第1ヘッド410及び第4ヘッド440のピエゾ素子417には、第1駆動信号COM_1が印加される。第1駆動信号COM_1によって吐出されたインク滴は小さいので、形成されるドットは小さくなり、高解像度で印刷を行うことができる。
尚、図9に示すように、第1ヘッド410から吐出されたインク滴によって形成されるドットと、第4ヘッド440から吐出されたインク滴によって形成されるドットは、ノズルが並ぶ方向に並ぶようにインク滴の吐出タイミングが調整されている。
用紙Sは、第1駆動信号COM_1の周期Tにおいて搬送方向に1/720インチ進められる。そして、周期Tごとに図9に示すドットが形成される。この結果、第1ドットと第2ドットとがノズルの並ぶ方向に交互に並び、720dpiの印刷が行われる。
ここでは、第1ヘッド410と第4ヘッド440を用いて説明を行っているが、実際は、第1ヘッド410〜第6ヘッド460が使用される。この場合、第1ヘッド410〜第6ヘッド460から吐出されたインク滴で形成されるドットがノズルが並ぶ方向に一列に並ぶようにインク滴の吐出タイミングが調整され、ドットが形成される。このとき、紙幅方向には、ヘッド3個分のドット列が形成可能となるため、紙幅方向に約3インチの画像を形成することができるようになる。
次に、幅広印刷モードでの印刷動作について説明する。前述の画像幅の特定方法によって、第1状態では画像を印刷できないと判定されると、第2状態になるように第2ノズル群が移動させられ幅広印刷モードで印刷が行われる。
図10は、第1実施形態における幅広印刷モードで印刷を行うときのヘッドの位置について説明するための図である。図10においても、ヘッドと形成されるドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、円形内に「1」と示されているものは、第1ノズル群のヘッド(ここでは、第3ヘッド430)からのインク滴の吐出によって形成されたドットであり、円形内に「2」と示されているものは第2ノズル群のヘッド(ここでは、第4ヘッド440)からのインク滴の吐出によって形成されたドットである。尚、ここでも、説明のため印刷される画像の全画素に大ドットを形成するものとして説明を行う。但し、印刷される画像によっては、ドットの形成されない画素もある。
幅広印刷モードに移行するとき、ボールネジ445,455,465がボールネジ回転用モータ446,456,466によって回転させられる。そして、第4ヘッド440〜第6ヘッドが上述の第2状態に移動させられる。そうすると、第2ノズル群が右側に移動させられることになる。
次に、ASIC60は、用紙Sを搬送させる際に、高解像度モードのときの2倍の速度で搬送させるように用紙搬送機構20を制御するようにする。よって、用紙Sは、駆動信号COM_2の周期Tにおいて搬送方向に1/360インチ進められる。そして、周期Tごとに図10に示すドットが形成される。尚、幅広印刷モードにおいて、第1ドットと第2ドットが用紙Sの紙幅方向に一列に並んで形成されるようにインク吐出タイミングが調整されている。この結果、幅広印刷モードでの360dpiの印刷が行われる。
ここでは、第3ヘッド430と第4ヘッド440を用いて説明を行っているが、実際は第1ヘッド410〜第6ヘッド460が使用される。この場合、第1ヘッド410〜第6ヘッド460が吐出するインク滴によって形成されたドット列は、紙幅方向に一列に並ぶように形成される。このとき、紙幅方向には、ヘッド6個分のドット列が形成可能となるため、紙幅方向に6インチの画像を形成することができる。
幅広印刷モードで使用される第2駆動信号COM_2は、高解像度モードで使用される駆動信号とは異なっている。また、幅広印刷モードでは、用紙Sの搬送速度が高解像度モードにおける搬送速度の2倍にされている。このようにすることで、幅広印刷モードでは、一度の印刷において用紙の全面に印刷でき、印刷速度は高解像度モードにおける速度の2倍の速度になる。換言すると、高解像度モードでは、幅広印刷モードよりも高解像度で印刷をすることができるが、印刷できる幅は幅広印刷モードの1/2となり、さらに印刷速度も1/2となる。
<第1実施形態の変形例(その1)>
図11A及び図11Bは、第1実施形態のヘッド構成の変形例を示す図である。図11Aは、変形例における第1状態を示し、図11Bは、変形例における第2状態を示す。変形例において、移動可能なヘッドは、第2ヘッド420、第4ヘッド440、及び第6ヘッド460となっている。このとき、第1ノズル群は、第1ヘッド410、第3ヘッド430、及び第5ヘッド450によって構成される。また、第2ノズル群は、第2ヘッド420、第4ヘッド440、第6ヘッド460によって構成される。
図11A及び図11Bは、第1実施形態のヘッド構成の変形例を示す図である。図11Aは、変形例における第1状態を示し、図11Bは、変形例における第2状態を示す。変形例において、移動可能なヘッドは、第2ヘッド420、第4ヘッド440、及び第6ヘッド460となっている。このとき、第1ノズル群は、第1ヘッド410、第3ヘッド430、及び第5ヘッド450によって構成される。また、第2ノズル群は、第2ヘッド420、第4ヘッド440、第6ヘッド460によって構成される。
変形例では移動可能なヘッドと移動しないヘッドとを交互に用紙Sの搬送方向について交互に配置している。このようにすることによって、ヘッドを移動させるためのボールネジ425,445,465、ボールネジ回転用モータ426,446,466、及び軸受け427,447,467を間隔をあけて配置することができる。
一方、変形例の前に説明した実施形態にはヘッド配置の観点から次の利点がある。変形例の前に説明した実施形態において、上述のようなヘッドの配置構成にすることによって、変形例のときに比して、第1状態において第1ノズル群のヘッドと、このヘッドに重なる第2ノズル群のヘッドとの間により大きな距離が生ずる。このようにより大きな距離を生ずることによって、第1ノズル群のインク滴がドットを形成してから第2ノズル群のインク滴がドットを形成するまでにより多くの時間を要することとなる。よって、第1ノズル群のインク滴が乾いてから第2ノズル群のインク滴のドットを形成することができる。
<第1実施形態の変形例(その2)>
第1実施形態のさらなる変形例として、第1ノズル群(第1ヘッド410〜第3ヘッド430)についてもノズル列方向に移動可能としてもよい。そうすると、例えば高解像度モードで用紙Sの紙幅の1/2の大きさの画像を、用紙Sの中央に高解像度(720dpi)で印刷させたいときにおいて、第1ノズル群(第1ヘッド410〜第3ヘッド430)を中央に移動させる。そして、ノズル列方向について、第2ノズル群(第4ヘッド440〜第6ヘッド460)のノズルが、第1ノズル群のノズルのノズル間に配置されるように移動させられる。このようにすることによって、小さな画像について高解像度の印刷を用紙Sの左半分の領域に限らずに行うことができる。
第1実施形態のさらなる変形例として、第1ノズル群(第1ヘッド410〜第3ヘッド430)についてもノズル列方向に移動可能としてもよい。そうすると、例えば高解像度モードで用紙Sの紙幅の1/2の大きさの画像を、用紙Sの中央に高解像度(720dpi)で印刷させたいときにおいて、第1ノズル群(第1ヘッド410〜第3ヘッド430)を中央に移動させる。そして、ノズル列方向について、第2ノズル群(第4ヘッド440〜第6ヘッド460)のノズルが、第1ノズル群のノズルのノズル間に配置されるように移動させられる。このようにすることによって、小さな画像について高解像度の印刷を用紙Sの左半分の領域に限らずに行うことができる。
尚、この場合、第1状態で印刷を行うか第2状態で印刷を行うかは、最右端の画素の位置のみで判定されない。このときは、画像の最左端の画素から最右端の画素までの長さ(画像幅とする)と、ノズルの最左端の位置からノズルの最右端の位置までの長さ(画像形成可能幅)が比較される。そして、画像幅が画像形成可能幅以下のときには第1状態で印刷が行われ、画像幅が画像形成可能幅よりも大きいときには第2状態で印刷が行われる。
このようにして、形成するべき画像の幅に応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490が制御される。尚、画像幅が第1ノズル群と第2ノズル群とで構成されるノズル列の長さより大きいか否かについて判定するコンピュータ110のCPU113と、この判定に応じて第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490を制御するASIC60は、制御部に相当する。
ここでは、コンピュータ110のCPU113が、画像幅が第1ノズル群と第2ノズル群とで構成されるノズル列の長さより大きいか否かについて判定したが、これをプリンタ1のASIC60で行わせることとしてもよい。この場合、プリンタ1のASIC60が制御部に相当する。
===第2実施形態===
<全体構成について>
図12は、第2実施形態における印刷システムのブロック図である。この印刷システム100’は、プリンタ1’、コンピュータ110、表示装置120、及び入力装置130を備えている。第2実施形態において、プリンタ1’は、紙、布、フィルム等の媒体に画像を印刷するインクジェットプリンタである。
<全体構成について>
図12は、第2実施形態における印刷システムのブロック図である。この印刷システム100’は、プリンタ1’、コンピュータ110、表示装置120、及び入力装置130を備えている。第2実施形態において、プリンタ1’は、紙、布、フィルム等の媒体に画像を印刷するインクジェットプリンタである。
コンピュータ110、表示装置120、及び入力装置130については、第1実施形態のものと同様であるので説明を省略する。次に、第2実施形態におけるプリンタ1’の構成について説明する。
<プリンタ1’の全体構成>
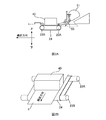
図13Aは、第2実施形態におけるプリンタ1’の斜視図であり、図13Bは、第2実施形態におけるプリンタ1’の断面図である。以下に図12も参照しつつ、第2実施形態のプリンタであるインクジェットプリンタの基本的な構成について説明する。
図13Aは、第2実施形態におけるプリンタ1’の斜視図であり、図13Bは、第2実施形態におけるプリンタ1’の断面図である。以下に図12も参照しつつ、第2実施形態のプリンタであるインクジェットプリンタの基本的な構成について説明する。
第2実施形態のプリンタ1’は、用紙搬送機構20’、キャリッジ移動機構30、ヘッドユニット40’検出器群50、ASIC60’、駆動信号生成回路70、及びフラットケーブル90を有する。
用紙搬送機構20’は、媒体としての用紙Sを印刷可能な位置に送り込んだり、この用紙Sを搬送方向に所定の搬送量で搬送させたりするものである。この搬送方向は、次に説明するキャリッジ移動方向と交差する方向である。そして、図13A及び図13Bに示すように、用紙搬送機構20’は、給紙ローラ21と、搬送モータ22と、搬送ローラ27と、プラテン28と、排紙ローラ25と、従動ローラ26とを有する。給紙ローラ21は、紙挿入口に挿入された用紙Sをプリンタ1’内に送るためのローラである。搬送モータ22は、用紙Sを搬送方向に搬送させるためのモータであり、その動作は、ASIC60’によって制御される。搬送ローラ27は、給紙ローラ21によって送られた用紙Sを従動ローラ26との間に挟み込み、印刷可能な領域まで搬送するためのローラである。排紙ローラ25は、印刷が終了した用紙Sを搬送するためのローラである。第1実施形態における用紙搬送機構20は連続的に一枚の用紙を搬送させていたが、第2実施形態における用紙搬送機構20’は、用紙Sを断続的に搬送する。
キャリッジ移動機構30は、ヘッドユニット40’が取り付けられたキャリッジCRをキャリッジCRの移動方向に移動させるためのものである。キャリッジ移動機構は、第1ノズル群と第2ノズル群をノズルの並ぶ方向の垂直方向に移動させるノズル移動機構に相当する。尚、ヘッドユニット40’は、後述するヘッド移動機構490と第1ヘッド410’と第2ヘッド420’とを有する。
キャリッジ移動機構30は、キャリッジモータ31と、ガイド軸32と、タイミングベルト33と、駆動プーリー34と、アイドラプーリー35とを有する。ガイド軸32は、キャリッジCRを移動可能な状態で支持する。このガイド軸32は、キャリッジの移動方向に沿って取り付けられている。そして、キャリッジモータ31がASIC60’によって制御されることによって、キャリッジCRの移動方向の動きが制御される。キャリッジモータ31が動作すると、キャリッジCRがこのガイド軸32に沿って移動する。これに伴い、ヘッドユニット40’もキャリッジの移動方向に移動する。
ヘッドユニット40’は、用紙Sにインク滴を吐出するためのものである。ヘッドユニット40’は、ヘッド移動機構490’と第1ヘッド410’と第2ヘッド420’とを有する。第1ヘッド410’及び第2ヘッド420’は、インク滴を用紙Sに吐出してドットを形成させるためのものである。ヘッド移動機構490’は、第2ヘッド420’を用紙Sの搬送方向に移動させる機構である。このヘッド移動機構490’と第1ヘッド410’及び第2ヘッド420’との関係については後に詳述する。
第1ヘッド410’及び第2ヘッド420’は、それぞれ複数のノズルを有し(第2実施形態では各360個)を有する。第1ヘッド410’及び第2ヘッド420’は、キャリッジCRに設けられているので、キャリッジCRが移動すると、第1ヘッド410’及び第2ヘッド420’も同じ方向に移動する。そして、第1ヘッド410’及び第2ヘッド420’が移動中にインクを断続的に吐出することによって、移動方向に沿ったドット列が用紙Sに形成される。
図12に示されるように、ASIC60’と駆動信号生成回路70は、同一の基板CTR上に設けられている。また、インクジェットプリンタ1’は、ヘッドユニット40’を保持するキャリッジCRを移動させながら印刷を行うため、キャリッジCR上のヘッドユニット40を基板CTRに対して移動可能に接続するためにフラットケーブル90を有している。
検出器群50、及び駆動信号生成回路70の構成については第1実施形態のものと同様であるので説明を省略する。
<ヘッドユニット40’の構成>
上述の通り、ヘッドユニット40’は、キャリッジCRに含まれるように構成されている。そして、ヘッドユニット40’には、第1ヘッド410’及び第2ヘッド420’が含まれている。そして、それぞれのヘッドには、360個のノズルと、このノズルからインク滴を吐出させるためのピエゾ素子417が含まれている。ピエゾ素子417は、一つ一つのノズルに独立したものが取り付けられている。また、ヘッド制御部HC’の制御により各ノズルのピエゾ素子417に印加される駆動パルスが選択される。そして、駆動パルスがピエゾ素子417に印加されることにより、個々のノズルからインク滴が吐出される。
上述の通り、ヘッドユニット40’は、キャリッジCRに含まれるように構成されている。そして、ヘッドユニット40’には、第1ヘッド410’及び第2ヘッド420’が含まれている。そして、それぞれのヘッドには、360個のノズルと、このノズルからインク滴を吐出させるためのピエゾ素子417が含まれている。ピエゾ素子417は、一つ一つのノズルに独立したものが取り付けられている。また、ヘッド制御部HC’の制御により各ノズルのピエゾ素子417に印加される駆動パルスが選択される。そして、駆動パルスがピエゾ素子417に印加されることにより、個々のノズルからインク滴が吐出される。
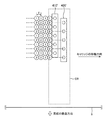
図14A及び図14Bは、第2実施形態におけるヘッドユニット40’の2つのヘッド配置について説明するための図である。図14A及び図14Bでは、第1ヘッド410’及び第2ヘッド420’をプリンタ1’の上から見た図となっている。プリンタ1’の上部から見た場合、これらのノズルは他の要素に阻まれて見ることができない。しかし、ここでは、第1ヘッド410’のノズルと第2ヘッド420’のノズルとの関係が理解しやすいように、ノズルの位置が実線で描かれている。尚、第1ヘッド410’が含むノズル列は第1ノズル群に相当し、第2ヘッド420’が含むノズル列は第2ノズル群に相当する。
各ヘッドには、ブラックインクノズル列K、シアンインクノズル列C、マゼンタインクノズル列M、及びイエローインクノズル列Yが形成されている。各ノズル列は、インクを吐出するための吐出口であるノズルを複数個(第2実施形態では各360個)備えている。各ノズル列の複数のノズルは、用紙Sの搬送方向に沿って一定のノズルピッチで並んでいる。ここでは、ノズルピッチは、1/360インチである。各ヘッドのノズルには、図中の上から順に番号が付されている(#1〜#360)。
ヘッドユニット40’には、第2ヘッド420’をノズル列方向に移動させるためのヘッド移動機構490’が含まれている。ヘッド移動機構490’は、ボールネジ425’、ボールネジ回転用モータ426’、及び軸受け427’を含む。また、ヘッド移動機構490’は、第2ヘッド420’の位置情報を取得してASIC60’に送るためのリニアエンコーダ(不図示)、及びリニアエンコーダからの位置情報に基づいてボールネジ回転用モータ426’を制御するための制御装置としてのASIC60’を含む。尚、このヘッド移動機構490’は、第2ノズル群をノズル列方向に移動させる移動機構に相当する。
第2ヘッド420’は、ボールネジ425’が回転することによって、ノズルが並ぶノズル列方向に移動可能になっている。図に示すように、ボールネジ425’の下端部には、ボールネジ回転用モータ426’が取り付けられている。また、ボールネジ425’の上端部には、ボールネジ425’を回転可能に受けるための軸受け427’が配置されている。
最初に、第1状態における第1ヘッド410’と第2ヘッド420’の配置の概略について説明する。図14Aに示す第1ヘッド410’と第2ヘッド420’の配置状態が第1状態である。第1状態において、第2ヘッド420’は、第1ヘッド410’のノズル間に第2ヘッド420’のノズルがくるように配置される。より詳しくいうと、第1ヘッド410’のノズル#1とノズル#2との間に第2ヘッド420’のノズル#1がくるように配置される。
このような配置にして、第1ヘッド410’と第2ヘッド420’のノズルからインク滴を吐出することによって、用紙Sの搬送方向について第1ヘッド410’から吐出されたインク滴によって形成されるドットと第2ヘッド420’から吐出されたインク滴によって形成されるドットが、用紙Sの搬送方向について交互に並ぶように形成することが可能となる。そして、キャリッジCRをキャリッジCRの移動方向に移動させながら、第1ヘッド410’と第2ヘッド420’からインク滴を吐出することで紙幅方向にわたって720dpiで画像を形成することができるようになっている。
次に、第2状態における第1ヘッド410’と第2ヘッド420’の配置の概略について説明する。図14Bに示す第1ヘッド410’と第2ヘッド420’の配置状態が第2状態である。第2状態において、キャリッジCRの移動方向について、第1ヘッド410’は第2ヘッド420’とヘッドの端部を除いて重ならないように配置される。また、第1ヘッド410’のノズル#360と第2ヘッド420’のノズル#1とで構成されるノズルピッチが1/360インチとなるように配置されている。
このような配置にして、第1ヘッド410’と第2ヘッド420’のノズルからインク滴を吐出することによって、用紙Sの搬送方向について、第1ヘッド410’から吐出されたインク滴によって形成されるドット列と第2ヘッド420’から吐出されたインク滴によって形成されるドット列とを、用紙Sの搬送方向について並んで形成することが可能となる。そして、キャリッジCRをキャリッジCRの移動方向に移動させながら、第1ヘッド410’と第2ヘッド420’からインク滴を吐出することで紙幅方向にわたって360dpiで画像を形成することができるようになっている。
<最下端の画素の位置の特定について>
用紙Sに印刷を行う前に、コンピュータ110は、プリンタ1’に上述の第1状態及び第2状態のいずれの状態で印刷を行わせるべきかを判定する。第2実施形態において第1状態でドットを形成するのは、印刷する画像が最初のパスだけで印刷を完了できる場合である。これは、例えば、用紙の上部にページ数を印刷するだけなどの用途を想定している。尚、「パス」とは、用紙Sのある搬送処理と次の搬送処理との間で、キャリッジCRがガイド軸32の左端から右端に移動する、又は、右端から左端に移動する一回の動作をいう。
用紙Sに印刷を行う前に、コンピュータ110は、プリンタ1’に上述の第1状態及び第2状態のいずれの状態で印刷を行わせるべきかを判定する。第2実施形態において第1状態でドットを形成するのは、印刷する画像が最初のパスだけで印刷を完了できる場合である。これは、例えば、用紙の上部にページ数を印刷するだけなどの用途を想定している。尚、「パス」とは、用紙Sのある搬送処理と次の搬送処理との間で、キャリッジCRがガイド軸32の左端から右端に移動する、又は、右端から左端に移動する一回の動作をいう。
第1状態及び第2状態のいずれの状態で印刷を行わせるべきかを判定するために、印刷される画像の画像データに基づいて、画像の最下端にある画素の位置を特定し、この位置の画素について第1状態における最初のパスでドットを形成することができるか否かについて判定を行う。以下に、画像の最下端の画素の位置の特定手法、及び、この判定方法について説明を行う。
図15は、第2実施形態において、用紙Sに形成されるであろう画像を形成するドットと、各ヘッドのノズルとの関係について説明するための図である。図には、第1ノズル群としての第1ヘッド410’と第2ノズル群としての第2ヘッド420’が第1状態で配置されている。また、用紙S上にはこれから形成されるであろうドットが画素単位で記載されている。また、ここでは、ノズルと形成されるであろうドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、図には同様の理由によりノズル数も減らし、さらに用紙S上の画素数も減らして記載されている。
まず、コンピュータ110は、実行中のアプリケーションソフトから画像の印刷命令及び画像データを受け取ると、その画像に応じた印刷データを生成する。この印刷データは、コンピュータ110がプリンタドライバを実行することによって以下のようにして生成される。コンピュータ110は、画像データを受け取ると、この画像について解像度の変換処理を行う。ここでは、第1状態において印刷を行うために720dpiの解像度になるように画像の解像度の変換処理が行われる。
次に、コンピュータ110は、解像度の変換処理がされた画像データについてハーフトーン処理を行う。ハーフトーン処理は、画像データを画素ごとに、ドット無し、小ドット、中ドット、大ドットのいずれのサイズであるかを示すデータに変換する処理である。尚、ここでは、説明の簡単のために、ハーフトーン処理後のデータにはドット無し又は大ドットの2種類しかないものとして説明を行う。
このように、ハーフトーン処理が行われると、用紙S上の画素ごとにドットを形成するか否かを示す画素データが生成されることとなる。図には、この画素データに基づき用紙Sの各画素にドットを形成するか否かが示されている。ここでは、ドットが形成される画素には黒丸が記載され、ドットが形成されない画素には何も記載されていない。
このように用紙Sの画素にドットを形成するか否かを特定できるようになると、コンピュータ110は、ドットが形成される画素の最下端の位置(ここでは、最下端位置Y_PICとする)を特定する。また、第1状態における第1ヘッド410’及び第2ヘッド420’のノズルによってドットの形成が可能な最下端の位置(おこでは、ドット形成可能位置Y_HEAD)があらかじめ特定されている(図15では、Y_HEADは8となっている)。
最下端位置Y_PICの特定方法は、例えば次のようにして行われる。前述のハーフトーン処理によって、用紙S上のどの画素にドットを形成するか否かを示す画素データが生成されている。コンピュータ110は、この画素データに基づいて、図15に示すように用紙Sに形成されるであろうドットを特定する。そして、コンピュータ110は、用紙Sの最上端から最下端までについて調査し、用紙Sの搬送方向についてドットが存在する画素の最下端位置Y_PICを特定する。図15において、最下端位置Y_PICは11となっている。
コンピュータ110は、このようにして特定した最下端位置Y_PICと、第1状態におけるドット形成可能位置Y_HEADとを比較する。そして、最下端位置Y_PICがドット形成可能位置Y_HEADよりも大きいとき、コンピュータ110は、第1状態では最初のパスだけで画像を印刷しきれないものと判定し、プリンタ1に第2ノズル群を第2状態の位置にするように指示する。また、このときコンピュータ110は、720dpi(第2状態)で印刷しないと判定するので、再度アプリケーションソフトから受け取った画像データについて360dpiに変換する解像度変換処理を行う。
解像度変換処理が行われると、コンピュータ110は、解像度変換処理された画像データについてラスタライズを行って生成された印刷データをプリンタ1’に送る。プリンタ1’は、この印刷データに基づいて印刷を行う。
一方、最下端位置Y_PICが第1状態におけるドット形成可能位置Y_HEAD以下のとき、コンピュータ110は、第1状態で印刷を行うものと判定する。そして、コンピュータ110は、ハーフトーン処理を行ったデータをラスタライズ処理して、このラスタライズ処理して生成された印刷データをプリンタ1’に送る。プリンタ1’は、このようにして生成された印刷データに基づいて印刷を行う。
このように、最初のパスだけで印刷できる用紙Sの搬送方向についての画像の長さに応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490’が制御される。つまり、画像の長さに応じて第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490’が制御される。形成するべき画像の用紙搬送方向の長さを考慮するコンピュータ110のCPU113と、第2ノズル群の位置を第1状態及び第2状態のいずれかの状態になるようにヘッド移動機構490’を制御するASIC60’は、制御部に相当する。
尚、上述のコンピュータ110のCPU113の機能をプリンタ1’のASIC60’に持たせることとしてもよい。この場合、プリンタ1’のASIC60’が制御部に相当する。
<動作について>
次に、第2実施形態におけるプリンタ1’の印刷動作について説明する。ここでは、高解像度モードでの印刷動作と幅広印刷モードでの印刷動作について説明する。高解像度モードで印刷を行うか幅広印刷モードで印刷を行うかは、画像のデータに基づいて、用紙Sに印刷されるべく画像が第1状態のヘッド位置において最初のパスだけで印刷を完了できるか否かによってコンピュータ110によって選択される。
次に、第2実施形態におけるプリンタ1’の印刷動作について説明する。ここでは、高解像度モードでの印刷動作と幅広印刷モードでの印刷動作について説明する。高解像度モードで印刷を行うか幅広印刷モードで印刷を行うかは、画像のデータに基づいて、用紙Sに印刷されるべく画像が第1状態のヘッド位置において最初のパスだけで印刷を完了できるか否かによってコンピュータ110によって選択される。
ここでは、最初に高解像度モードでの印刷動作について説明する。よって、最初に印刷される画像は、最初のパスにおいて第1状態における第1ヘッド410’と第2ヘッド420’とで構成されるノズル列の長さの範囲に入っている画像である。尚、ここでは、説明のため印刷される画像の全画素に大ドットを形成するものとして説明を行う。但し、印刷すべき画像によっては、ドットの形成されない画素もある。
印刷するべき画像データがアプリケーションからプリンタドライバに送られると、コンピュータ110は、上述の最下端位置の特定方法により、画像を第1状態で印刷するかどうかについて判定を行う。そして、第1状態で印刷を行うと判定されるとき、高解像度モードでの印刷が行われる。
図16は、第2実施形態における高解像度モードで印刷を行うときのヘッドの配置について説明するための図である。図16では、ヘッドと形成されるドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、図16では、同様の理由からノズル数も減らして記載されている。また、第1ヘッド410’及び第2ヘッド420’から吐出されたインク滴が形成するドットが円形の実線によって示されている。第1ヘッド410’からインク滴が吐出され形成されたドットは、円形内に「1」が記載されている。また、第2ヘッド420’からインク滴が吐出され形成されたドットは、円形内に「2」が記載されている。
上述の通り、高解像度モードのとき、第1ヘッド410’と第2ヘッド420’のノズルがノズルの並ぶ方向についてずれるように配置されている。また、第2実施形態において、ノズル列の方向に用紙Sが断続的に搬送される。具体的には、キャリッジCRの移動と用紙Sの搬送が交互に行われる。
高解像度モードにおいて、第1ヘッド410’及び第2ヘッド420’のピエゾ素子417には、第1駆動信号COM_1が印加される。また、図16に示すように第1ヘッド410’が吐出したインク滴が形成するドット(第1ドット)と第2ヘッド420’が吐出したインク滴が形成するドット(第2ドット)とが、ノズルの並ぶ方向について交互に並んで列を作るようにインク吐出タイミングが調整されている。キャリッジCRは、第1駆動信号COM_1の周期Tにおいて搬送方向に1/720インチ進められる。そして、周期Tごとに図16に示すドットが形成される。この結果、720dpiの印刷が行われる。
次に幅広印刷モードで印刷を行うときの動作について説明する。前述の画像の高さの特定方法によって、第1状態で画像を印刷しないと判定されると、第2状態になるように第2ノズル群が移動させられ幅広印刷モードで印刷が行われる。
図17は、第2実施形態における幅広印刷モードで印刷を行うときのヘッドの位置について説明するための図である。図17においても、ヘッドと形成されるドットとの関係の説明を容易にするために、1つのヘッドに1つのノズル列だけが記載されている。また、円形内に「1」と示されているものは、第1ヘッド410’からのインク滴の吐出によって形成されたドットであり、円形内に「2」と示されているものは第2ヘッド420’からのインク滴の吐出によって形成されたドットである。
幅広印刷モードに移行するとき、ボールネジ425’がボールネジ回転用モータ426’によって回転させられる。そして、上述の第2状態の位置になるように第2ヘッド420’の位置が調整される。次に、ASIC60’は、キャリッジCRを移動させる際に、高解像度モードのときの2倍の速度でキャリッジCRを移動させるようにキャリッジ移動機構30を制御するようにする。よって、キャリッジCRは、第2駆動信号COM_2の周期Tにおいて搬送方向に1/360インチ進められる。そして、周期Tごとに図17に示す一列のドット列が形成される。尚、幅広印刷モードにおいて、第1ドットの列と第2ドットの列とが用紙Sの搬送方向に一列に並んで形成されるようにインク吐出タイミングが調整されている。この結果、幅広印刷モードでの360dpiの印刷が行われる。
このようにすることで、画像の用紙搬送方向の長さに応じた印刷を行うことができる。
===その他の実施の形態===
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。特に、以下に述べる実施形態であっても、本発明に含まれるものである。
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。特に、以下に述べる実施形態であっても、本発明に含まれるものである。
また、第1実施形態ではヘッドの数を6個とし、第2実施形態ではヘッドの数を2個そして説明を行ったが、ヘッドの数をより増やすことも可能である。
図18Aは、第1実施形態における第2状態の変形例について説明するための図である。上述の第1実施形態における第2状態において、第1ノズル群のヘッド(第3ヘッド430)のノズルと第2ノズル群のヘッド(第4ヘッド440)のノズルは、用紙Sの搬送方向について重ならないように配置された。しかし、図18Aに示すように、第1ノズル群のヘッド(第3ヘッド430)の一部のノズルと第2ノズル群のヘッド(第4ヘッド440)の一部のノズルとが用紙Sの搬送方向について重なるように配置されることとしてもよい。
図18Bは、第2実施形態における第2状態の変形例について説明するための図である。第2実施形態についても、第1ノズル群のヘッド(第1ヘッド410’)の一部のノズルと第2ノズル群のヘッド(第2ヘッド420’)の一部のノズルとがキャリッジCRの移動方向について重なるように配置されることとしてもよい。
<ヘッドについて>
前述の実施形態では、圧電素子を用いてインクを吐出していた。しかし、液体を吐出する方式は、これに限られるものではない。例えば、熱によりノズル内に泡を発生させる方式など、他の方式を用いてもよい。
また、前述の実施形態では、ヘッドはキャリッジに設けられていた。しかし、キャリッジに着脱可能なインクカートリッジにヘッドが設けられても良い。
前述の実施形態では、圧電素子を用いてインクを吐出していた。しかし、液体を吐出する方式は、これに限られるものではない。例えば、熱によりノズル内に泡を発生させる方式など、他の方式を用いてもよい。
また、前述の実施形態では、ヘッドはキャリッジに設けられていた。しかし、キャリッジに着脱可能なインクカートリッジにヘッドが設けられても良い。
===まとめ===
(1)上述の印刷システムとしての液体吐出システムは、用紙Sにインク滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群(第1実施形態において第1ヘッド410、第2ヘッド420、第3ヘッド430。第2実施形態において、第1ヘッド410’)と、用紙Sにインク滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第2ノズル群(第1実施形態において、第4ヘッド440’、第5ヘッド450’、第6ヘッド460’。第2実施形態において、第2ヘッド420’。)であって、ノズルの並ぶ方向に移動可能な第2ノズル群と、を含む。
(1)上述の印刷システムとしての液体吐出システムは、用紙Sにインク滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群(第1実施形態において第1ヘッド410、第2ヘッド420、第3ヘッド430。第2実施形態において、第1ヘッド410’)と、用紙Sにインク滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第2ノズル群(第1実施形態において、第4ヘッド440’、第5ヘッド450’、第6ヘッド460’。第2実施形態において、第2ヘッド420’。)であって、ノズルの並ぶ方向に移動可能な第2ノズル群と、を含む。
また、液体吐出システムは、ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群のノズルが位置する第1状態にもなり、第2ノズル群の位置が第1ノズル群の位置に対してノズルの並ぶ方向にずれており、かつ、ノズルの並ぶ方向について第2ノズル群の端のノズルが第1ノズル群のいずれかのノズルと所定のノズルピッチだけ離れている第2状態にもなるように、第2ノズル群を移動させる移動機構(ヘッド移動機構490,490’)を備える。さらに、液体吐出システムは、インク滴を吐出して形成するべき画像のノズルが並ぶ方向の長さに応じて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるように移動機構を制御する制御部(コンピュータ110とASIC60)を備えている。
このようにすることで、形成するべき画像のノズルが並ぶ方向の長さに応じてノズル列の配置状態を選択的に作り出すことができる。例えば、画像の幅に応じて第1状態にすることで高解像度(720dpi)で印刷を行うことができ、第2状態にすることで、解像度は下がるものの幅広での印刷を行うことができる。
(2)また、用紙Sと第1ノズル群との位置をノズルの並ぶ方向の垂直方向に相対的に移動させる相対移動機構をさらに備える。具体的には、第1実施形態において、相対移動機構は用紙搬送機構20である。また、第2実施形態において、相対移動機構はキャリッジ移動機構30である。
このようにしてノズルからインク滴を吐出させることで、用紙Sにドットを形成することができる。
このようにしてノズルからインク滴を吐出させることで、用紙Sにドットを形成することができる。
(3)また、相対移動機構は、第2状態のときにおける用紙Sと第1ノズル群の相対移動速度を、第1状態のときにおける相対移動速度よりも速くする。
このようにすることで、第2状態のときは第1状態のときよりもノズル列と用紙Sとの相対速度が速いので、第2状態のときは第1状態のときよりも速くドットを形成することができる。
このようにすることで、第2状態のときは第1状態のときよりもノズル列と用紙Sとの相対速度が速いので、第2状態のときは第1状態のときよりも速くドットを形成することができる。
(4)また、相対移動機構は、用紙Sをノズルの並ぶ方向の垂直方向に搬送させる用紙搬送機構20である。
このようにすることで、ラインヘッドプリンタ1のようなプリンタの構成において、第1状態及び第2状態を作り出し、ドットを形成するときの条件に適したノズル配置にすることができる。
このようにすることで、ラインヘッドプリンタ1のようなプリンタの構成において、第1状態及び第2状態を作り出し、ドットを形成するときの条件に適したノズル配置にすることができる。
(5)また、相対移動機構は、第1ノズル群と第2ノズル群をノズルの並ぶ方向の垂直方向に移動させるキャリッジ移動機構30であることとしてもよい。
このようにすることで、第2実施形態におけるインクジェットプリンタ1’のような構成において、第1状態及び第2状態を作り出し、ドットを形成するときの条件に適したノズル配置にすることができる。
このようにすることで、第2実施形態におけるインクジェットプリンタ1’のような構成において、第1状態及び第2状態を作り出し、ドットを形成するときの条件に適したノズル配置にすることができる。
(6)また、第1状態は、ノズルの並ぶ方向において、第1ノズル群のノズル間の中央に第2ノズル群のノズルが位置する状態である。
このようにすることで、ノズルの並ぶ方向について第1ノズル群のノズルと第2ノズル群のノズルで均等なノズルピッチを構成することができる。
このようにすることで、ノズルの並ぶ方向について第1ノズル群のノズルと第2ノズル群のノズルで均等なノズルピッチを構成することができる。
(7)また、移動機構は、第2ノズル群をノズルの並ぶ方向に移動させるためのボールネジを備える。
このようにすることで、ボールネジを回転させて第2ノズル群を移動させ、第1状態及び第2状態のいずれかの状態を作り出すことができる。
このようにすることで、ボールネジを回転させて第2ノズル群を移動させ、第1状態及び第2状態のいずれかの状態を作り出すことができる。
(8)また、第1状態のときにおいて全画素にドットを形成するとき、第1ノズル群のノズルから吐出されたインク滴によって形成されるドットと、第2ノズル群のノズルから吐出されたインク滴によって形成されるドットは、ノズルの並ぶ方向に交互に並ぶように形成される。また、第2状態のときにおいて全画素にドットを形成するとき、第1ノズル群のノズルから吐出されたインク滴によって形成されるドット列と、第2ノズル群のノズルから吐出されたインク滴によって形成されるドット列は、ノズルの並ぶ方向に並ぶように形成される。
このように第1状態において、第1ノズル群のノズルから吐出されたインク滴によって形成されるドットと第2ノズル群のノズルから吐出されたインク滴によって形成されるドットとが、ノズルの並ぶ方向について交互に並ぶように形成される。一方、第2状態では、第1ノズル群のノズルから吐出されたインク滴によって形成されるドット列と第2ノズル群のノズルから吐出されたインク滴によって形成されるドット列とが、ノズルの並ぶ方向について並ぶように形成される。よって、第1状態では、第2状態よりも解像度を高くしてドットを形成することができる。
(9)また、第1状態のとき及び第2状態のときにおいて全画素にドットを形成するとき、第1ノズル群のノズルから吐出されたインク滴によって形成されるドットがノズルの並ぶ方向の垂直方向に並ぶように形成されるとともに、第2ノズル群のノズルから吐出されたインク滴によって形成されるドットがノズルの並ぶ方向の垂直方向に並ぶように形成され、第2状態のときにおける垂直方向のドットの間隔は、第1状態のときにおける垂直方向のドットの間隔よりも大きい。
このようにすることで、第2状態のときには、ノズルと用紙Sとの相対速度を第1状態のときよりも速くして印刷を行うことができる。
(10)また、制御部は、画像を形成するためのデータに基づいて、第2ノズル群の位置が第1状態及び第2状態のいずれかの状態になるように移動機構を制御する。
(11)また、制御部は、ノズル群が並ぶ方向の長さについて、画像の長さが第1ノズル群の長さ以下のときには、第2ノズル群の位置を第1状態にし、画像の長さが第1ノズル群の長さよりも大きいときには、第2ノズル群の位置を前記第2状態にする。
このようにすることによって、印刷する画像の幅に基づいて第1状態及び第2状態のいずれかの状態にすることができるので、画像の幅に応じて高解像度印刷又は幅広印刷を行うことができる。
このようにすることによって、印刷する画像の幅に基づいて第1状態及び第2状態のいずれかの状態にすることができるので、画像の幅に応じて高解像度印刷又は幅広印刷を行うことができる。
(12)また、ノズルが並ぶ方向の長さについての画像の長さは、画像を形成するためのデータに基づいて求められる。
(13)また、画像を形成するためのデータは、画素にドットを形成するか否かを表すデータである
(14)また、前述の構成要素をすべて含む液体吐出システムによれば、記述のほぼ全ての効果を奏するため、本発明の目的が最も有効に達成される。
(14)また、前述の構成要素をすべて含む液体吐出システムによれば、記述のほぼ全ての効果を奏するため、本発明の目的が最も有効に達成される。
(15)また、上述のコンピュータ110とプリンタ1とで構成される印刷システムの構成をプリンタとしての液体吐出装置が単独で行うこととすることもできる。
(16)また、ノズルが並ぶ方向について、インク滴を吐出して形成するべき画像の長さが第1ノズル群の長さ以下のとき、ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群のノズルが位置する第1状態にするように、第2ノズル群を移動させ、インク滴を吐出させるステップと、ノズルが並ぶ方向について、インク滴を吐出して形成するべき画像の長さが第1ノズル群の長さより長いとき、第2ノズル群の位置が第1ノズル群の位置に対してノズルの並ぶ方向にずれており、かつ、ノズルの並ぶ方向について第2ノズル群の端のノズルが第1ノズル群のいずれかのノズルと所定のノズルピッチだけ離れている第2状態にするように、第2ノズル群をノズルが並ぶ方向に移動させ、液体滴を吐出させるステップと、を含む液体吐出方法があることはいうまでもない。
1 プリンタ、20 用紙搬送機構、21 給紙ローラ、22 搬送モータ、
23A 上流側搬送ローラ、23B 下流側搬送ローラ、24 ベルト、
25 排紙ローラ、26 従動ローラ、27 搬送ローラ、28 プラテン、
30 キャリッジ移動機構、31 キャリッジモータ、32 ガイド軸、
33 タイミングベルト、34 駆動プーリー、35 アイドラプーリー、
40 ヘッドユニット、50 検出器群、53 紙検出センサ、
60 ASIC、61 インタフェース、70 駆動信号生成回路、
90 フラットケーブル、110 コンピュータ、111、
112 インタフェース、113 CPU、114 メモリ、
120 表示装置、130 入力装置、140 記録再生装置、
410 第1ヘッド、420 第2ヘッド、430 第3ヘッド、
440 第4ヘッド、445 ボールネジ、446 ボールネジ回転用モータ、
447 軸受け、450 第5ヘッド、455 ボールネジ、
456 ボールネジ回転用モータ、457 軸受け、460 第6ヘッド、
465 ボールネジ、466 ボールネジ回転用モータ、467 軸受け、
490 ヘッド移動機構、
CR キャリッジ、CTR 基板、S 用紙
23A 上流側搬送ローラ、23B 下流側搬送ローラ、24 ベルト、
25 排紙ローラ、26 従動ローラ、27 搬送ローラ、28 プラテン、
30 キャリッジ移動機構、31 キャリッジモータ、32 ガイド軸、
33 タイミングベルト、34 駆動プーリー、35 アイドラプーリー、
40 ヘッドユニット、50 検出器群、53 紙検出センサ、
60 ASIC、61 インタフェース、70 駆動信号生成回路、
90 フラットケーブル、110 コンピュータ、111、
112 インタフェース、113 CPU、114 メモリ、
120 表示装置、130 入力装置、140 記録再生装置、
410 第1ヘッド、420 第2ヘッド、430 第3ヘッド、
440 第4ヘッド、445 ボールネジ、446 ボールネジ回転用モータ、
447 軸受け、450 第5ヘッド、455 ボールネジ、
456 ボールネジ回転用モータ、457 軸受け、460 第6ヘッド、
465 ボールネジ、466 ボールネジ回転用モータ、467 軸受け、
490 ヘッド移動機構、
CR キャリッジ、CTR 基板、S 用紙
Claims (16)
- 媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
を備える液体吐出システム。 - 前記媒体と前記第1ノズル群との位置を前記ノズルの並ぶ方向の垂直方向に相対的に移動させる相対移動機構をさらに備える、請求項1に記載の液体吐出システム。
- 前記相対移動機構は、前記第2状態のときにおける前記媒体と前記第1ノズル群の相対移動速度を、前記第1状態のときにおける相対移動速度よりも速くする、請求項2に記載の液体吐出システム。
- 前記相対移動機構は、前記媒体を前記ノズルの並ぶ方向の垂直方向に搬送させる媒体搬送機構である、請求項2または3に記載の液体吐出システム。
- 前記相対移動機構は、前記第1ノズル群と第2ノズル群を前記ノズルの並ぶ方向の垂直方向に移動させるノズル群移動機構である、請求項2または3に記載の液体吐出システム。
- 前記第1状態は、前記ノズルの並ぶ方向において、前記第1ノズル群のノズル間の中央に前記第2ノズル群のノズルが位置する状態である、請求項1〜5のいずれかに記載の液体吐出システム。
- 前記移動機構は、前記第2ノズル群を前記ノズルの並ぶ方向に移動させるためのボールネジを備える、請求項1〜6のいずれかに記載の液体吐出システム。
- 前記第1状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットと、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットは、前記ノズルの並ぶ方向に交互に並ぶように形成され、
前記第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドット列と、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドット列は、前記ノズルの並ぶ方向に並ぶように形成される、請求項1〜7のいずれかに記載の液体吐出システム。 - 前記第1状態のとき及び第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成されるとともに、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成され、前記第2状態のときにおける前記垂直方向のドットの間隔は、前記第1状態のときにおける前記垂直方向のドットの間隔よりも大きい、請求項1〜8のいずれかに記載の液体吐出システム。
- 前記制御部は、前記画像を形成するためのデータに基づいて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する、請求項1〜9のいずれかに記載の液体吐出システム。
- 前記制御部は、前記ノズルが並ぶ方向の長さについて、前記画像の長さが前記第1ノズル群の長さ以下のときには、前記第2ノズル群の位置を前記第1状態にし、前記画像の長さが前記第1ノズル群の長さよりも大きいときには、前記第2ノズル群の位置を前記第2状態にする、請求項1〜10のいずれかに記載の液体吐出システム。
- 前記ノズルが並ぶ方向の長さについての前記画像の長さは、前記画像を形成するためのデータに基づいて求められる、請求項11に記載の液体吐出システム。
- 前記画像を形成するためのデータは、画素にドットを形成するか否かを表すデータである、請求項10〜12のいずれかに記載の液体吐出システム。
- 媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、を備え、
前記媒体と前記第1ノズル群との位置を前記ノズルの並ぶ方向の垂直方向に相対的に移動させる相対移動機構をさらに備え、
前記相対移動機構は、前記第2状態のときにおける前記媒体と前記第1ノズル群の相対移動速度を、前記第1状態のときにおける相対移動速度よりも速くし、
前記相対移動機構は、前記媒体を前記ノズルの並ぶ方向の垂直方向に搬送させる媒体搬送機構であり、
前記第1状態は、前記ノズルの並ぶ方向において、前記第1ノズル群のノズル間の中央に前記第2ノズル群のノズルが位置する状態であり、
前記移動機構は、前記第2ノズル群を前記ノズルの並ぶ方向に移動させるためのボールネジを備え、
前記第1状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットと、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットは、前記ノズルの並ぶ方向に交互に並ぶように形成され、前記第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドット列と、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドット列は、前記ノズルの並ぶ方向に並ぶように形成され、
前記第1状態のとき及び第2状態のときにおいて全画素にドットを形成するとき、前記第1ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成されるとともに、前記第2ノズル群のノズルから吐出された前記液体滴によって形成されるドットが前記ノズルの並ぶ方向の垂直方向に並ぶように形成され、前記第2状態のときにおける前記垂直方向のドットの間隔は、前記第1状態のときにおける前記垂直方向のドットの間隔よりも大きく、
前記制御部は、前記画像を形成するためのデータに基づいて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御し、
前記制御部は、前記ノズルが並ぶ方向の長さについて、前記画像の長さが前記第1ノズル群の長さ以下のときには、前記第2ノズル群の位置を前記第1状態にし、前記画像の長さが前記第1ノズル群の長さよりも大きいときには、前記第2ノズル群の位置を前記第2状態にし、
前記ノズルが並ぶ方向の長さについての前記画像の長さは、前記画像を形成するためのデータに基づいて求められ、
前記画像を形成するためのデータは、画素にドットを形成するか否かを表すデータである、液体吐出システム。 - 媒体に液体滴を吐出するための複数のノズルが所定のノズルピッチで並ぶ第1ノズル群と、
前記媒体に液体滴を吐出するための複数のノズルが前記所定のノズルピッチで並ぶ第2ノズル群であって、前記ノズルの並ぶ方向に移動可能な第2ノズル群と、
前記ノズルの並ぶ方向において前記第1ノズル群の前記ノズル間に前記第2ノズル群の前記ノズルが位置する第1状態にもなり、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にもなるように、前記第2ノズル群を移動させる移動機構と、
前記液体滴を吐出して形成するべき画像の前記ノズルが並ぶ方向の長さに応じて、前記第2ノズル群の位置が前記第1状態及び前記第2状態のいずれかの状態になるように前記移動機構を制御する制御部と、
前記ノズルごとに取り付けられ、駆動信号に応じて前記液体滴を吐出させる液体吐出部と、
を備える液体吐出装置。 - ノズルが並ぶ方向について、液体滴を吐出して形成するべき画像の前記長さが第1ノズル群の長さ以下のとき、前記ノズルの並ぶ方向において第1ノズル群のノズル間に第2ノズル群の前記ノズルが位置する第1状態にするように、前記第2ノズル群を移動させ、前記液体滴を吐出させるステップと、
前記ノズルが並ぶ方向について、前記液体滴を吐出して形成するべき画像の長さが前記第1ノズル群の長さより長いとき、前記第2ノズル群の位置が前記第1ノズル群の位置に対して前記ノズルの並ぶ方向にずれており、かつ、前記ノズルの並ぶ方向について前記第2ノズル群の端のノズルが前記第1ノズル群のいずれかのノズルと前記所定のノズルピッチだけ離れている第2状態にするように、前記第2ノズル群を前記ノズルが並ぶ方向に移動させ、前記液体滴を吐出させるステップと、
を含む液体吐出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006134199A JP2007301902A (ja) | 2006-05-12 | 2006-05-12 | 液体吐出システム、液体吐出装置、及び液体吐出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006134199A JP2007301902A (ja) | 2006-05-12 | 2006-05-12 | 液体吐出システム、液体吐出装置、及び液体吐出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007301902A true JP2007301902A (ja) | 2007-11-22 |
Family
ID=38836251
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006134199A Pending JP2007301902A (ja) | 2006-05-12 | 2006-05-12 | 液体吐出システム、液体吐出装置、及び液体吐出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007301902A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021514871A (ja) * | 2018-03-22 | 2021-06-17 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 可動式プリントヘッド |
-
2006
- 2006-05-12 JP JP2006134199A patent/JP2007301902A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021514871A (ja) * | 2018-03-22 | 2021-06-17 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 可動式プリントヘッド |
| US11752788B2 (en) | 2018-03-22 | 2023-09-12 | Hewlett-Packard Development Company, L.P. | Moveable printheads |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4594902B2 (ja) | 液体吐出装置、及び液体吐出方法 | |
| JP4281793B2 (ja) | 吐出タイミング調整方法 | |
| JP4983420B2 (ja) | 液体吐出装置及び液体吐出方法 | |
| US7625057B2 (en) | Method for adjusting ejection timing and ejection timing adjusting apparatus | |
| JP5169599B2 (ja) | 液体吐出装置 | |
| JP5747517B2 (ja) | 記録方法及び記録装置 | |
| JP2008155378A (ja) | 印刷方法、及び、印刷装置 | |
| JP2007283731A (ja) | 液体吐出装置、印刷装置、及び液体吐出方法 | |
| JP2022063095A (ja) | 液体吐出装置、および印刷方法 | |
| JP2007283639A (ja) | 液体吐出装置、印刷装置、及び液体吐出方法 | |
| JP3856046B2 (ja) | 記録装置、記録方法、プログラムを記憶する記憶媒体およびコンピュータシステム | |
| JP2007301902A (ja) | 液体吐出システム、液体吐出装置、及び液体吐出方法 | |
| JP2009012349A (ja) | 液体吐出装置及び液体吐出方法 | |
| JP2007260934A (ja) | 印刷装置及び印刷方法 | |
| JP2009000837A (ja) | 液体吐出装置及び液体吐出方法 | |
| JP4983421B2 (ja) | 液体吐出装置及び液体吐出方法 | |
| JP4542303B2 (ja) | 液体吐出装置、及び、コンピュータシステム | |
| JP5035203B2 (ja) | 液体吐出装置及び液体吐出方法 | |
| JP4556467B2 (ja) | 印刷装置および印刷制御方法 | |
| JP2009061621A (ja) | 液体噴射装置及び液体噴射方法 | |
| JP5018987B2 (ja) | 液体吐出装置、及び、コンピュータシステム | |
| JP5035204B2 (ja) | 液体吐出装置及び液体吐出方法 | |
| JP2005074853A (ja) | 印刷装置、印刷方法、ドット形成方法、プログラム及び印刷システム | |
| JP2008207565A (ja) | 液体吐出装置、及び、コンピュータシステム | |
| JP5035478B2 (ja) | 液体吐出装置及び液体吐出方法 |