JP2007244722A - 自走式掃除機 - Google Patents
自走式掃除機 Download PDFInfo
- Publication number
- JP2007244722A JP2007244722A JP2006074314A JP2006074314A JP2007244722A JP 2007244722 A JP2007244722 A JP 2007244722A JP 2006074314 A JP2006074314 A JP 2006074314A JP 2006074314 A JP2006074314 A JP 2006074314A JP 2007244722 A JP2007244722 A JP 2007244722A
- Authority
- JP
- Japan
- Prior art keywords
- cleaner
- self
- propelled
- vacuum cleaner
- rotating body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004140 cleaning Methods 0.000 claims abstract description 10
- 230000033001 locomotion Effects 0.000 claims description 30
- 238000001514 detection method Methods 0.000 claims description 25
- 238000013507 mapping Methods 0.000 claims description 14
- 239000000428 dust Substances 0.000 claims description 13
- 239000013013 elastic material Substances 0.000 claims description 3
- 230000001133 acceleration Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 244000043261 Hevea brasiliensis Species 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 229920003052 natural elastomer Polymers 0.000 description 3
- 229920001194 natural rubber Polymers 0.000 description 3
- 229920001084 poly(chloroprene) Polymers 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images


Abstract
【課題】
掃除機本体が転倒あるいは転覆しても、掃除可能な自走式掃除機を提供する。
【解決手段】
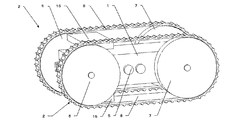
自走式掃除機は、掃除機本体1と、無限軌道2と、吸込口体3とを備える。無限軌道2は、掃除機本体1の左右両側に夫々備えられ、掃除機本体1よりも大きく形成される。吸込口体3は、第1吸込口15と、第2吸込口16と、配管17,18と、切り換え弁19とを備える。この構成により、走行中に掃除機本体1が転倒して天地が反転しても、無限軌道2は、床面と接地する。これにより、自走式掃除機は、転倒しても継続して掃除を続けることができる。
【選択図】図1
掃除機本体が転倒あるいは転覆しても、掃除可能な自走式掃除機を提供する。
【解決手段】
自走式掃除機は、掃除機本体1と、無限軌道2と、吸込口体3とを備える。無限軌道2は、掃除機本体1の左右両側に夫々備えられ、掃除機本体1よりも大きく形成される。吸込口体3は、第1吸込口15と、第2吸込口16と、配管17,18と、切り換え弁19とを備える。この構成により、走行中に掃除機本体1が転倒して天地が反転しても、無限軌道2は、床面と接地する。これにより、自走式掃除機は、転倒しても継続して掃除を続けることができる。
【選択図】図1
Description
本発明は、空間内を自律走行する自走式掃除機に関する。
従来の自走式掃除機は、特許文献1に開示されるように、エンコーダによって検出された従動輪の回転角に基づいて作成された移動情報と、自走式移動体の本体の正面、背面、左右側面に備えられた各種測距センサまたは接触センサによって検出された壁や障害物までの距離に基づいて作成された障害物認識情報とから走行空間の大きさと形状を示すマップを作成し、そのマップを基準に行動経路を決定して各種作業を行っている。
移動情報は、従動輪の回転角に基づいて作成されている。実際の走行において、車輪の横滑り等が発生した場合、演算した移動距離と実際の移動距離とに誤差が生じる。この誤差が累積していくと、正確なマップを作成できなくなり、各種作業に支障を来たす。
そこで、自走式掃除機では、無限軌道を装着し、床面との滑りを防止して、正確な移動情報を得られるようにしたものが考えられている。
特開平5−46239号公報
ところで、自走式掃除機は、床面の起伏が大きい空間や段差の低い障害物が多々ある空間等を走行する場合、床面の起伏や障害物によって掃除機本体が転倒あるいは転覆することがある。このように、掃除機本体の天地が反転した状態の場合、自走式掃除機は、駆動輪が床面と接触しないため走行することができなくなり、掃除ができなくなる問題がある。特に、無限軌道を装着した自走式掃除機の場合は、車輪で走行する自走式掃除機に比べて、床面の起伏や障害物によって掃除機本体が転倒あるいは転覆する問題がある。
そこで、上記問題を鑑み、本願発明は、掃除機本体が転倒あるいは転覆しても、掃除可能な自走式掃除機の提供を目的とする。
上記目的を達成するために、本発明では、床面を走行するための走行手段を有する掃除機本体に、塵埃を吸い込む吸込口が設けられ、前記走行手段は、回転体と、前記回転体を駆動する駆動装置とを備え、前記回転体は、前記掃除機本体が転倒しても走行可能なように、前記掃除機本体よりも大きく形成され、前記吸込口は、前記掃除機本体の底面と天面に配置され、前記掃除機本体が転倒して前記掃除機本体の姿勢が変わったときでも、床面と対向することを特徴とする。
上記構成によると、回転体を掃除機体本体より高くしたことにより、起伏が大きい走行空間を走行中に、自走式掃除機が転倒・転覆して天地が反転の状態となっても、走行を続けることができる。吸込口が掃除機本体の底面および天面に設けているので、掃除機本体が反転しても引き続き掃除作業を行うことができる。
回転体は、前記掃除機本体の左右両側に備えられ、前記回転体の高さが前記掃除機本体の高さよりも大とされ、かつ、前記掃除機本体よりも前後方向に突出されていることを特徴とする。
上記構成によると、自走式掃除機の走行に際し、障害物に衝突したとき、回転体が障害物に接触し、掃除機本体は接触しない。また、掃除機本体が転倒して天地が反転しても、掃除機本体は床面に接触することはなく、引き続き掃除作業を行える。
回転体は、少なくともその外装面が弾性材料で構成されていることを特徴とする。この構成によると、回転体と障害物とが衝突した際、回転体あるいは障害物を傷つけることがない。特に本発明は、回転体が掃除機本体よりも大きく形成されるため、掃除機本体よりも先に障害物に衝突する。そのため、回転体が少なくとも弾性材料から構成されているので、障害物あるいは掃除機本体の破損を防止できる。
回転体は、掃除機本体に対して着脱自在とされたことを特徴とする。この構成によると、走行する床面に適した材料を使用した回転体を選択することができる。例えば、動摩擦係数が小さい床面では、天然ゴムを使用した回転体を選択することにより、従来の自走式掃除機に使用されている車輪やキャスタ等に比べ、走行時の床面に対する滑りを少なくすることができ、測定された移動距離の精度が高くなる。
回転体は、無限軌道とされたことを特徴とする。無限軌道は床面との設置面積が大きくなるので、車輪と床面の滑りを防止することができる。これにより、実際の走行において、車輪が横滑りや空転しながら走行した場合、発生する走行距離の誤差をなくすことができ、演算した移動距離と実際の移動距離との大きな誤差の発生を防止して、正確な移動情報を取得することができる。
また、走行手段の動作を検出する動作検出手段と、前記動作検出手段の結果に基づいて掃除機本体の移動情報を作成する移動情報作成手段とが備えられ、前記移動情報作成手段は、前記動作検出手段が前記走行手段の停止状態を検出したとき、回転体が障害物に衝突したと判断することを特徴とする。なお、移動情報とは、自走式掃除機が移動した移動距離、移動方向、あるいは、移動速度等の情報である。
自走式掃除機は、ベッドの下や机の下等のように高さの低い空間に進入する場合、本体が進入可能か否かを検出する必要がある。そのため、従来は、リミットセンサ等の接触センサを本体と同じ高さあるいは本体より高い位置に設けて、進入可否判定する方法や、赤外線等の非接触式センサを上方に向けて設け、進入可否判定する方法を採っていた。しかし、この検出方法では、センサにより障害物を傷つけたり、逆にセンサが損傷を受けたりすることがある。
そこで、動作検出手段により、回転体の動きと掃除機本体の動きを検出すると、障害物との衝突を検出することができる。これを利用して、掃除機本体が高さの低い空間に侵入できるか否かの判断をすることができる。すなわち、自走式掃除機は、回転体が障害物に接触するかしないかによって、掃除機本体が障害物の下部に進入できるか否かの判定を行う。回転体が障害物に接触しなければ、回転体より小さい掃除機本体は障害物に接触することなく通ることができる。これにより、接触センサやバンパを備える必要がないため、コスト削減を図れる。
周囲の状況を検出する状況検出手段と、周囲の状況に応じて移動を制御する制御手段とを備え、移動情報作成部は、前記状況検出手段の検出結果に基づいて、掃除領域をマッピングするマッピング手段を備えたことを特徴とする。
上記構成によると、移動情報作成部は、状況検出手段からの情報に基づいて壁や障害物までの距離データを計測し、動作検出手段からの情報に基づいて走行距離データを計測して、集められた情報から走行空間内の形状と大きさを示すマップを作成する。これにより、自走式掃除機は、作成されたマップに基づいて行動経路を決定し、各種作業を行うことができる。特に、本発明の自走式掃除機は、走行精度が高く走行安定性に優れているので、状況検出手段とマッピング手段を装備すれば、複雑な環境であってもマップによる計画走行が可能となる。
以上のとおり、本発明は、回転体を掃除機本体よりも大きくすることで、回転体が掃除機本体よりも先に障害物に接触するので、掃除機本体が障害物に接触して損傷することを防げる。しかも、回転体の動きに基づいて、障害物の有無を判断することができる。
また、回転体を無限軌道とすることにより、掃除機本体が転倒して天地が反転したとしても、無限軌道は床面と接地する。したがって、掃除機本体が天地が反転した状態になっても走行でき、掃除を継続することができる。
以下、本発明の自走式掃除機を説明する。自走式掃除機は、部屋の壁、家具、ベッド等の障害物がある、周囲を囲まれた空間内を自律して移動する。自走式掃除機は、図1および図2に示すように、掃除機本体1と、床面を走行するための無限軌道2と、塵埃を吸い込む吸込口体3とを備える。
掃除機本体1は、高さの低い直方体形状とする。この掃除機本体1には、無限軌道2を駆動させる駆動装置4と、塵埃を集める集塵室4aと、周囲の障害物位置を検出する状況検出手段である測距センサ5と、塵埃を吸引する電動送風機と、これらを制御する制御部と、電力を供給する充電池とを備える。無限軌道2と駆動装置3とから走行手段が構成される。
無限軌道2は、掃除機本体1の左右両側に夫々備えられており、駆動装置4に接続された駆動輪6と、駆動輪6の回転に従動する従動輪7と、駆動輪6と従動輪7とに掛け渡されたベルト8とから構成される。
駆動輪6は、左右夫々が独立して回転する。例えば、前進または後退のときは、両駆動輪6が同時に回転し、旋回のときは、夫々の駆動輪6が異なる方向に回転するか、一方の駆動輪6が停止し他方の駆動輪6が回転する。従動輪7は、無端状のベルト8を介して駆動輪6の回転が伝達され、回転する。
ベルト8は、駆動輪6および従動輪7に対して着脱自在とする。ベルト8を着脱可能とすることで、走行する床面に適した材料を使用したベルト8を選択することができる。例えば、動摩擦係数が小さい床面では、天然ゴムを使用したベルト8を選択することにより、従来の自走式掃除機に使用されている車輪やキャスタ等に比べ、走行時の床面に対する滑りを少なくすることができ、走行精度が高くなる。
なお、天然ゴムは、機械的強度と耐候性において、弾性を有するクロロプレンゴムに劣るため、着脱可能な構造を採り、定期的に交換する必要がある。図1および図2に示すように、掃除機本体1の外側に無限軌道2が配置されているため、容易に交換が可能とされる。
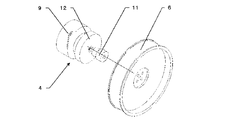
駆動装置4は、駆動モータ9と、駆動モータ9の動力を無限軌道2の駆動輪6に伝達する伝達部10と、クラッチ板11と、駆動輪6の回転を検出する動作検出手段であるエンコーダ12とを備える。
クラッチ板11は、無限軌道2が障害物等に衝突したときに、駆動モータ9に一定以上の負荷がかからないようにするために無限軌道2への動力を遮断するものであって、図3に示すように、駆動モータ9と伝達部10との間に配される。これにより、自走式掃除機は、障害物に衝突したときに進行を停止するが、無限軌道2にはこれ以上の駆動力がかからず、障害物あるいは自走式掃除機自体を傷つけたりすることを防ぐことができる。
エンコーダ12は、駆動輪6の回転数を検出する検出センサであって、駆動モータ9とクラッチ板11との間に配される。なお、エンコーダ12の検出結果は制御部に送信される。
集塵室4aは、吸込口体3から吸い込まれた塵埃を貯めるものであって、フィルタ(図示せず)を介して電動送風機と連通する。測距センサ5は、赤外線センサや超音波センサ等の非接触式センサとされ、掃除機本体1の側面に複数個配置される。
制御部は、内部にRAM、ROMおよびCPUを有する一般的なマイクロコンピュータから構成されており、測距センサ6からの入力に基づいて駆動装置4を制御する。また、制御部は、掃除機本体1の移動情報を作成する移動情報作成手段を有する。この移動情報作成手段は、エンコーダ12によって検出された駆動輪6の回転角から移動情報を算出し、この算出結果と測距センサ5の検出結果から自走式掃除機の掃除領域をマッピングするマッピング手段を備える。
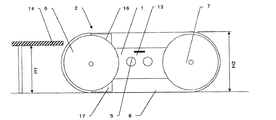
次に、無限軌道2について説明する。無限軌道2は、図1および図2に示すように、掃除機本体1よりも大とされる。詳しくは、無限軌道2の高さが掃除機本体1の高さよりも大とされ、かつ、掃除機本体1の前後よりも出っ張って形成される。
無限軌道2を掃除機本体1よりも大きくすることで、掃除機本体1が転倒したとしても無限軌道2が床面と接地する。そのため、掃除機本体1が転倒しても走行することができる。これにより、自走式掃除機は、起伏が大きい走行空間を走行中に転倒したとき、天地逆の状態で走行を続けることができる。
しかし、掃除機本体1が反転して走行すると、前後方向または左右方向が反転する。すなわち、掃除機本体1を反転した状態で走行させた場合、通常姿勢での走行における進行方向に対しての左右方向が逆となる。そうすると、マッピング手段によって作成する掃除領域のマップは、左右が反転した間違ったマップデータを作成してしまう問題がある。
そこで、掃除機本体1に、掃除機本体1の天地を判断する加速度センサ13が設けられる。この加速度センサ13は、重力加速度を検出するセンサであって、検出した加速度の方向から掃除機本体1の天地を判断する。例えば、加速度センサ13からの検出がない場合、通常の姿勢と判断し、反転の際に受ける反力による加速度と重力加速度の2つの加速度を検出した場合、掃除機本体1が反転したと判断する。反転したと検知したときには、マッピングを開始した基点に戻り、再度マッピングを開始する。これにより、掃除機本体1が転倒したとしても、左右方向を間違えることなくマップデータを作成することができる。
また、無限軌道2を掃除機本体1よりも大きくすることで、無限軌道2は、掃除機本体1よりも先に障害物に衝突するバンパの役割を果たす。無限軌道2と障害物とが衝突した際、無限軌道2あるいは障害物を傷つけることがないように、ベルト8をクロロプレンゴム等の弾性を有するゴム材で形成するとよい。
無限軌道2は、掃除機本体1の側面に配された測距センサ5を覆う保護フードの役割を担う。測距センサ5を損傷から保護することができる上、外乱光の侵入を防止することができる。これにより、誤測定を防止することができる。
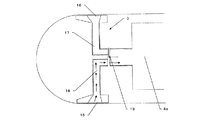
ところで、走行中の自走式掃除機は、測距センサ5を使って障害物を検知する。しかし、図4に示すように、ローテーブル14のように鉛直面への投影面積が小さい障害物に関しては、測距センサ5の視野に入らないことが多く、検出できないことが多々ある。そのため、従来では、掃除機本体1の外周に接触センサを有するバンパを装備し、測距センサ5で検知できなかった障害物をバンパの接触で検出し、回避していた。しかし、この検出方法では、障害物を傷つけたり、あるいは、掃除機本体が衝撃を受けたりすることがあり、故障の要因となる。
そこで、本発明は、接触センサを使用せずに、エンコーダ12が検出する駆動輪6の回転から障害物との衝突を検出している。詳しくは、エンコーダ12が駆動輪6の回転を検出する。制御部は、エンコーダ12の出力から駆動輪6の回転が停止したことを検知する。このとき、駆動モータ10は駆動されているので、制御部は、無限軌道が障害物に衝突したと判断して、駆動モータ10を逆回転させる。掃除機本体1は、障害物から離れる。
なお、上記のような障害物の検出方法を採用することで、掃除機本体1が高さの低い空間に侵入できるか否かの判断をすることができる。詳しくは、図4に示すように、床面からの高さH1のローテーブル14に、床面からの高さH2の無限軌道2を備えた自走式掃除機が衝突したとき、掃除機本体1は、ローテーブル14下に侵入できないと判断できる。
次に、吸込口体3について説明する。吸込口体3は、図5に示すように、第1吸込口15と、第2吸込口16と、第1吸込口15または第2吸込口16と集塵室4aとを連通する配管17,18と、第1吸込口15または第2吸込口16の配管17,18を選択的に切り換える切り換え弁19とを備える。
第1吸込口15は、掃除機本体1の底面に配置され、第2吸込口14は、掃除機本体1の天面に配置される。各吸込口15、16は、掃除機本体1よりも外側にあり、共に無限軌道2の軌道面と面一とされる。これにより、第1吸込口15および第2吸込口16は、走行時に床面と接地する。なお、第1吸込口15および第2吸込口16の構造は、一般的なものと同様とされるので説明は省略する。
各吸込口15、16は、配管17、18を構成するパイプによって掃除機本体1に支持される。このパイプは可撓性を有することによって、各吸込口15、16が床面に応じて移動可能となる。配管17、18は、掃除機本体1の外側から内側に導かれ、集塵室4aの入口に接続される。この入口に切り換え弁19が配される。なお、各配管17、18と集塵室4aとは、密閉した状態で接続されている。
切り換え弁19は、第1吸込口15または第2吸込口16のいずれか一方の配管17,18と集塵室4aとを連通させる弁である。この切り換え弁19は、一方の吸込口からの吸引を遮断することで、他方の吸込口の吸引力を増大させることができる。
切り換え弁19は、モータによって回動される。掃除機本体1が転倒して天地が反転したことを加速度センサ13が検出すると、その検出結果に基づいて制御部は、モータを駆動制御する。すなわち、加速度センサ13が下向きの重力加速度を検出したときは、通常の姿勢と判断し、切り換え弁19を第2吸込口16の配管18を閉鎖するよう姿勢に制御する。加速度センサ13が反転の際に受ける反力による加速度と重力加速度の2つの加速度を検出したときは、掃除機本体1が反転したと判断し、切り換え弁19を第1吸込口15の配管17を閉鎖するよう姿勢に制御する。
次に本発明の自走式掃除機の動作について説明する。先ず、マッピング手段は、図6に示すように、起点から出発して走行空間内を探索行動し、探索が完了した時点で起点に戻る。その間、制御部は、測距センサ5の情報から壁や障害物までの距離データを計測し、エンコーダ12の情報から走行距離データを計測し、加速度センサ13の情報から掃除機本体1が反転しているか否かを確認し、集められた情報からマッピング手段によって走行空間内の形状と大きさを示すマップを作成する。
自走式掃除機は、起点から走行を開始する(S21)。測距センサ5と加速度センサ13が起動し(S22)、同時に駆動モータが起動する(S23)。制御部は、時間tを初期値である0にし、RAMやROM等に記憶された以前のデータをクリアした後(S24)、計時を開始する。これにより、駆動モータおよびエンコーダ12はONとなる(S25)。走行開始後、制御部は、一定時間ごとに測距センサ5から検出結果(S26)、エンコーダ12からの検出結果(S27)、加速度センサ13からの検出結果(S28)を受信する。それら受信した結果情報がRAMに記憶される(S29)。
制御部は、掃除機本体1が反転しているか(S30)、障害物はあるか(S31)の判定を行う。もし、掃除機本体1が反転した場合は、起点に戻り、始めからマッピングを開始する。また、障害物を検知した場合は、駆動モータを停止させる(S32)。停止したことを確認したら、駆動モータを逆回転させ、掃除機本体1を後退させた後、所定の回避動作を行って(S33)、安全に障害物を回避しながら探索行動を続ける。
この動作を繰り返し、自走式掃除機が起点に戻った時点で、探索行動は終了する(S35)。制御部は、マッピング手段によって走行空間の形状と大きさを示すマップを作成し、作成されたマップに基づいて行動経路を決定し、各種作業を行う。
なお、本発明は、上記実施形態に限定されるものではなく、本発明の範囲内で修正・変更を加えることができるのは勿論である。例えば、上記実施形態では自走式掃除機について説明したが、特にこの限りではなく、自律して走行するロボット等の各種の作業を行える移動体であってもよい。また、回転体は、無限軌道に限られることはなく、例えば、スパイク状の車輪等のように、床面との滑りを防止できるものであればよい。
無限軌道の形状は、楕円形状に限られることはなく、三角形や四角形等で掃除機本体より大きい形状であれば良い。無限軌道のベルトは、特にクロロプレンゴム等の弾性を有するゴム材に限られることはなく、鉄あるいは樹脂等でもよい。ベルトを着脱自在としたが、特にこの限りではない、無限軌道全体を着脱してもよい。
エンコーダは、駆動輪の回転を検出しているが、従動輪あるいは駆動モータの回転を検出してもよい。自走式掃除機の移動情報は、エンコーダによる駆動輪の回転から算出する方法に限られることはない。例えば、撮像装置を有するセンサを備え、そのセンサによって床面の画像を検出し、その検出結果から移動情報を作成してもよい。
1 掃除機本体
2 無限軌道
3 吸込口体
4 駆動装置
4a 集塵室
5 側距センサ
6 駆動輪
7 従動輪
8 ベルト
9 駆動モータ
10 伝達部
11 クラッチ板
12 エンコーダ
13 加速度センサ
14 ローテーブル
15 第1吸込口
16 第2吸込口
17 配管
18 配管
19 切り換え弁
2 無限軌道
3 吸込口体
4 駆動装置
4a 集塵室
5 側距センサ
6 駆動輪
7 従動輪
8 ベルト
9 駆動モータ
10 伝達部
11 クラッチ板
12 エンコーダ
13 加速度センサ
14 ローテーブル
15 第1吸込口
16 第2吸込口
17 配管
18 配管
19 切り換え弁
Claims (7)
- 床面を走行するための走行手段を有する掃除機本体に、塵埃を吸い込む吸込口が設けられ、
前記走行手段は、回転体と、前記回転体を駆動する駆動装置とを備え、
前記回転体は、前記掃除機本体が転倒しても走行可能なように、前記掃除機本体よりも大きく形成され、
前記吸込口は、前記掃除機本体の底面と天面に配置され、
前記掃除機本体が転倒して前記掃除機本体の姿勢が変わったときでも、床面と対向することを特徴とする自走式掃除機。 - 回転体は、前記掃除機本体の左右両側に備えられ、
前記回転体の高さが前記掃除機本体の高さよりも大とされ、かつ、前記掃除機本体よりも前後方向に突出されていることを特徴とする請求項1に記載の自走式掃除機。 - 回転体は、少なくともその外装面が弾性材料で構成されていることを特徴とする請求項1または2に記載の自走式掃除機。
- 回転体は、掃除機本体に対して着脱自在とされたことを特徴とする請求項1〜3のいずれかに記載の自走式掃除機。
- 回転体は、無限軌道とされたことを特徴とする請求項1〜4のいずれかに記載の自走式掃除機。
- 走行手段の動作を検出する動作検出手段と、前記動作検出手段の結果に基づいて掃除機本体の移動情報を作成する移動情報作成手段とが備えられ、
前記移動情報作成手段は、前記動作検出手段が前記走行手段の停止状態を検出したとき、回転体が障害物に衝突したと判断することを特徴とする請求項1〜5のいずれかに記載の自走式掃除機。 - 周囲の状況を検出する状況検出手段と、周囲の状況に応じて移動を制御する制御手段とを備え、
移動情報作成部は、前記状況検出手段の検出結果に基づいて、掃除領域をマッピングするマッピング手段を備えたことを特徴とする請求項6に記載の自走式掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006074314A JP2007244722A (ja) | 2006-03-17 | 2006-03-17 | 自走式掃除機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006074314A JP2007244722A (ja) | 2006-03-17 | 2006-03-17 | 自走式掃除機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007244722A true JP2007244722A (ja) | 2007-09-27 |
Family
ID=38589622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006074314A Pending JP2007244722A (ja) | 2006-03-17 | 2006-03-17 | 自走式掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007244722A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010110416A1 (ja) * | 2009-03-27 | 2010-09-30 | ヤーマン株式会社 | 床用自走式掃除機用のダストシート及びこのダストシートを取り付けた床用自走式掃除機 |
| GB2494443A (en) * | 2011-09-09 | 2013-03-13 | Dyson Technology Ltd | Autonomous surface treating appliance |
| GB2497452A (en) * | 2013-03-01 | 2013-06-12 | Dyson Technology Ltd | Drive arrangement for an autonomous surface treating appliance |
| JP2015053894A (ja) * | 2013-09-12 | 2015-03-23 | 公立大学法人会津大学 | 水田除草ロボット |
| KR101756290B1 (ko) | 2016-02-22 | 2017-07-10 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| KR20190005446A (ko) * | 2017-07-06 | 2019-01-16 | 엘지전자 주식회사 | 자율주행 청소기 |
-
2006
- 2006-03-17 JP JP2006074314A patent/JP2007244722A/ja active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010110416A1 (ja) * | 2009-03-27 | 2010-09-30 | ヤーマン株式会社 | 床用自走式掃除機用のダストシート及びこのダストシートを取り付けた床用自走式掃除機 |
| US10647366B2 (en) | 2011-09-09 | 2020-05-12 | Dyson Technology Limited | Autonomous surface treating appliance |
| GB2494443A (en) * | 2011-09-09 | 2013-03-13 | Dyson Technology Ltd | Autonomous surface treating appliance |
| GB2494443B (en) * | 2011-09-09 | 2013-08-07 | Dyson Technology Ltd | Autonomous surface treating appliance |
| GB2497452A (en) * | 2013-03-01 | 2013-06-12 | Dyson Technology Ltd | Drive arrangement for an autonomous surface treating appliance |
| GB2497452B (en) * | 2013-03-01 | 2013-10-23 | Dyson Technology Ltd | Drive arrangement for an autonomous surface treating appliance |
| JP2015053894A (ja) * | 2013-09-12 | 2015-03-23 | 公立大学法人会津大学 | 水田除草ロボット |
| KR101756290B1 (ko) | 2016-02-22 | 2017-07-10 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| AU2017222038B2 (en) * | 2016-02-22 | 2019-05-16 | Lg Electronics Inc. | Moving robot and control method thereof |
| US10300596B2 (en) | 2016-02-22 | 2019-05-28 | Lg Electronics Inc. | Moving robot and control method thereof |
| US10427291B2 (en) | 2016-02-22 | 2019-10-01 | Lg Electronics Inc. | Moving robot and control method thereof |
| WO2017146419A1 (en) * | 2016-02-22 | 2017-08-31 | Lg Electronics Inc. | Moving robot and control method thereof |
| KR20190005446A (ko) * | 2017-07-06 | 2019-01-16 | 엘지전자 주식회사 | 자율주행 청소기 |
| KR102023394B1 (ko) | 2017-07-06 | 2019-09-20 | 엘지전자 주식회사 | 자율주행 청소기 |
| US10631694B2 (en) | 2017-07-06 | 2020-04-28 | Lg Electronics Inc. | Autonomous cleaner |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4181477B2 (ja) | 自走式掃除機 | |
| AU2013203861B2 (en) | Method of controlling automatic cleaner | |
| KR100654676B1 (ko) | 로봇청소기 | |
| EP3666152A1 (en) | Robot cleaner | |
| US8508329B2 (en) | Mobile robotic device having a collision sensor | |
| KR100871114B1 (ko) | 이동로봇 및 그 동작방법 | |
| US20050166356A1 (en) | Self-propelled vacuum cleaner | |
| JP2007213236A (ja) | 自律走行ロボットの経路計画方法及び自律走行ロボット | |
| SE527807C2 (sv) | Metod för kompensering av en robotstädares gyrosensor | |
| JP2007244722A (ja) | 自走式掃除機 | |
| JP2005230044A (ja) | 自律走行ロボットクリーナー | |
| CN113100663A (zh) | 自主式地板清洁器和用于自主式地板清洁的方法 | |
| KR102565250B1 (ko) | 로봇 청소기 | |
| WO2016096046A1 (en) | Measuring brush roll current for determining type of surface | |
| KR101060638B1 (ko) | 로봇 청소기 | |
| KR20070027840A (ko) | 로봇청소기 및 이를 이용한 제어방법 | |
| WO2018123321A1 (ja) | 自律走行型掃除機 | |
| JP2020511193A (ja) | ロボット清掃装置の車輪スリップを推定すること | |
| JP2005222226A (ja) | 自律走行ロボットクリーナー | |
| JP3339185B2 (ja) | 移動作業ロボット | |
| CN112423639B (zh) | 自主行走式吸尘器 | |
| JP6888847B2 (ja) | 自走式掃除機 | |
| WO2006003841A1 (ja) | 自走式移動車 | |
| KR20090033782A (ko) | 초음파거리센서 및 이를 이용하는 로봇청소기 | |
| US20220322903A1 (en) | Robotic cleaner |