JP2007227984A - Substrate processing apparatus - Google Patents
Substrate processing apparatus Download PDFInfo
- Publication number
- JP2007227984A JP2007227984A JP2007157723A JP2007157723A JP2007227984A JP 2007227984 A JP2007227984 A JP 2007227984A JP 2007157723 A JP2007157723 A JP 2007157723A JP 2007157723 A JP2007157723 A JP 2007157723A JP 2007227984 A JP2007227984 A JP 2007227984A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- processing
- units
- unit
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012545 processing Methods 0.000 title claims abstract description 151
- 239000000758 substrate Substances 0.000 title claims abstract description 130
- 238000000034 method Methods 0.000 claims abstract description 85
- 239000000126 substance Substances 0.000 claims description 3
- 238000003860 storage Methods 0.000 claims description 2
- 238000012546 transfer Methods 0.000 abstract description 66
- 238000010438 heat treatment Methods 0.000 description 28
- 238000001816 cooling Methods 0.000 description 26
- 238000011161 development Methods 0.000 description 22
- 238000000576 coating method Methods 0.000 description 16
- 239000011248 coating agent Substances 0.000 description 12
- 238000010586 diagram Methods 0.000 description 5
- 239000007888 film coating Substances 0.000 description 5
- 238000009501 film coating Methods 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000002209 hydrophobic effect Effects 0.000 description 3
- 239000010410 layer Substances 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000006555 catalytic reaction Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000018044 dehydration Effects 0.000 description 1
- 238000006297 dehydration reaction Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 239000011229 interlayer Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920002120 photoresistant polymer Polymers 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images




Landscapes
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
Description
本発明は、半導体基板、液晶表示装置用ガラス基板等(以下、「基板」と称する)に所定の処理を行う基板処理装置に関する。 The present invention relates to a substrate processing apparatus that performs predetermined processing on a semiconductor substrate, a glass substrate for a liquid crystal display device, and the like (hereinafter referred to as “substrate”).
周知のように、半導体や液晶ディスプレイなどの製品は、上記基板に対して洗浄、レジスト塗布、露光、現像、エッチング、層間絶縁膜の形成、熱処理、ダイシングなどの一連の諸処理を施すことにより製造されている。 As is well known, products such as semiconductors and liquid crystal displays are manufactured by performing a series of processes such as cleaning, resist coating, exposure, development, etching, interlayer insulation film formation, heat treatment, and dicing on the substrate. Has been.
こうした複数の工程を含む製造ラインにおける製造効率および製造能力を高めるために、従来から、それぞれの処理工程を担当する処理部を複数備えた基板処理装置の開発・実用化が行われてきた。 In order to increase the manufacturing efficiency and the manufacturing capability in a manufacturing line including a plurality of processes, a substrate processing apparatus including a plurality of processing units in charge of each processing process has been developed and put into practical use.
例えば、上述の諸処理のうち、レジスト塗布処理および現像処理を行う基板処理装置(いわゆるコータ&デベロッパ)においては、レジスト塗布、現像、加熱、冷却などの各処理を担うユニットをそれぞれ複数備えることにより、待ち時間を低減して製造効率および製造能力の向上を図ってきた。 For example, among the above-mentioned various processes, a substrate processing apparatus (so-called coater & developer) that performs resist coating and developing processes includes a plurality of units each responsible for resist coating, development, heating, cooling, and the like. Therefore, the waiting time has been reduced to improve the manufacturing efficiency and the manufacturing capacity.
そうした従来の基板処理装置においては、各処理部間の基板の授受を、多くの場合、1台の搬送ロボットにて担っていた。従って、処理部の数が増加するにつれ、搬送ロボットはより複雑な動作を要求され、それに伴ってその構造も複雑化せざるを得なくなってきた。その一方で、1台の搬送ロボットの搬送能力には限界があり、それを越える処理部の配置は、処理フローの停滞を招くだけであることから、従来の基板処理装置における装置構成では、処理効率および処理能力に限界があった。 In such a conventional substrate processing apparatus, the transfer of substrates between the processing units is often performed by a single transfer robot. Accordingly, as the number of processing units increases, the transfer robot is required to perform more complicated operations, and the structure thereof must be complicated accordingly. On the other hand, there is a limit to the transfer capability of a single transfer robot, and the arrangement of processing units that exceed the limit only causes a stagnation of the process flow. There were limits to efficiency and throughput.
また、上述のように処理部が増加することに伴って、基板処理装置は大型化せざるを得なくなってくるが、基板処理装置は、クリーンルームという面積が限られた空間に配置されることを踏まえると、基板処理装置の平面占有面積は、できるだけ小さいことが望まれる。 Further, as the number of processing units increases as described above, the substrate processing apparatus must be increased in size, but the substrate processing apparatus is arranged in a space with a limited area called a clean room. In light of this, it is desirable that the plane occupation area of the substrate processing apparatus be as small as possible.
本発明は、上記課題に鑑みてなされたものであり、高い基板処理能力を保持しつつ平面占有面積が抑制された基板処理装置を提供することを目的とする。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a substrate processing apparatus in which a plane occupation area is suppressed while maintaining a high substrate processing capability.
上記課題を解決するため、請求項1の発明は、基板処理装置であって、それぞれが複数の処理ユニットを含むユニット群を有し、所定の基板処理シーケンスに係る処理を行う複数のプロセス部が積層配置されてなり、前記複数のプロセス部が少なくとも、前記基板処理シーケンスとして薬液膜の形成を行う第1のプロセス部と基板に形成された露光パターンの現像を行う第2のプロセス部とを有してなり、前記複数のプロセス部がいずれも、それぞれにおいて前記ユニット群に含まれる少なくとも1つのユニットが配置された複数のユニット配置部と、前記複数のユニット配置部の間に設けられ、基板の受け渡しを行う受け渡し手段と、前記プロセス部において処理待ち状態の基板を収容可能な収容手段と、を備えることを特徴とする。
In order to solve the above-mentioned problem, the invention of
請求項1の発明によれば、基板処理装置の平面占有面積を抑制することができる。
According to invention of
<装置概要>
図1は、本発明の実施の形態に係る基板処理装置1の構成の概要を示す図である。図1に示すように、基板処理装置1は、装置外部との間で基板の授受を担うインデクサIDと、基板に対し所定の処理を施す複数の処理ユニットからなるプロセスモジュールPMと、露光装置であるステッパSTPとの間で基板を受け渡すインタフェースIFとを備える。なお、図1にはxyz3次元座標系を付しており、xyが水平面方向、zが鉛直方向を指し示している。以降の説明において、座標系は原則としてこれに従うものとする。
<Device overview>
FIG. 1 is a diagram showing an outline of the configuration of a
プロセスモジュールPMは、異なる処理が行われる上下2つのプロセス部からなる2段構造をとっている。以下、上段を上部プロセスモジュールUPM、下段を下部プロセスモジュールLPMとする。また、インデクサIDおよびインタフェースIFのいずれも、上部プロセスモジュールUPMおよび下部プロセスモジュールLPMのそれぞれとの間で基板を受け渡せる構造をとっている。よって、以降の説明の便宜上、インデクサIDにおいて上部プロセスモジュールに対応する部分を上部インデクサUID、下部プロセスモジュールLPMに対応する部分を下部インデクサLIDとし、インタフェースIFにおいて上部プロセスモジュールに対応する部分を上部インタフェースUIF、下部プロセスモジュールLPMに対応する部分を下部インタフェースLIFとする。さらに、上部インデクサUID、上部プロセスモジュールUPMおよび上部インタフェースUIFを上段部UFと、下部インデクサLID、下部プロセスモジュールLPMおよび下部インタフェースLIFを総じて下段部LFとそれぞれ総称することとする。 The process module PM has a two-stage structure composed of two upper and lower process units that perform different processes. Hereinafter, the upper stage is the upper process module UPM, and the lower stage is the lower process module LPM. Further, both the indexer ID and the interface IF have a structure capable of delivering a substrate to and from the upper process module UPM and the lower process module LPM. Therefore, for the convenience of the following description, the portion corresponding to the upper process module in the indexer ID is the upper indexer UID, the portion corresponding to the lower process module LPM is the lower indexer LID, and the portion corresponding to the upper process module in the interface IF is the upper interface. A portion corresponding to the UIF and the lower process module LPM is a lower interface LIF. Furthermore, the upper indexer UID, the upper process module UPM, and the upper interface UIF are collectively referred to as an upper stage UF, and the lower indexer LID, the lower process module LPM, and the lower interface LIF are collectively referred to as a lower stage LF.
<装置各部の構成>
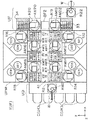
図2は、基板処理装置1の下段部LFの構成を示す図、図3は基板処理装置1の上段部UFの構成を示す図である。以下、図2および図3に基づいて、基板処理装置各部の構成を説明する。
<Configuration of each part>
FIG. 2 is a diagram illustrating a configuration of the lower stage portion LF of the
インデクサIDは、複数の基板を多段に収納可能なカセットCを上部インデクサUIDおよび下部インデクサLIDのそれぞれに複数載置することができる。 In the indexer ID, a plurality of cassettes C that can store a plurality of substrates in multiple stages can be placed on each of the upper indexer UID and the lower indexer LID.
いま、上部インデクサUIDに載置されるカセットCを上部カセットUC、下部インデクサLIDに載置されるカセットCを下部カセットLCとする。下部カセットLCには、基板処理装置1においてこれから処理がなされる未処理の基板Wが収納される。一方、上部カセットUCには、基板処理装置1において所定の処理がなされた基板Wが収納される。
Now, let the cassette C placed on the upper indexer UID be the upper cassette UC and the cassette C placed on the lower indexer LID be the lower cassette LC. In the lower cassette LC, unprocessed substrates W to be processed in the
また、下部インデクサLIDは、下部カセットLCからの基板の取り出しを担う移載ロボットR1を有している。移載ロボットR1には、アームAM1が備わっており、図示を省略する駆動機構によるy方向の水平移動、z軸方向の上下動、z軸を中心とした回転、アームAM1の伸縮などを適宜組み合わせることにより、基板Wの下部カセットLCからの取り出し、および後続の処理のためのプロセスモジュールPMに対する基板Wの受け渡しが可能となっている。一方、上部インデクサUIDは、上部カセットUCへの基板の収納を担う移載ロボットR21を有している。移載ロボットR2は、アームAM2を備えており、移載ロボットR1と同様の動作が可能で、プロセスモジュールPMにて所定の処理を終えた基板Wの受け取り、および上部カセットLCへの基板Wの収納が可能となっている。 The lower indexer LID has a transfer robot R1 that takes out the substrate from the lower cassette LC. The transfer robot R1 is provided with an arm AM1, and is appropriately combined with horizontal movement in the y direction, vertical movement in the z-axis direction, rotation about the z-axis, expansion and contraction of the arm AM1, etc. by a driving mechanism (not shown). Thus, it is possible to take out the substrate W from the lower cassette LC and to deliver the substrate W to the process module PM for subsequent processing. On the other hand, the upper indexer UID has a transfer robot R21 that is responsible for storing substrates in the upper cassette UC. The transfer robot R2 includes an arm AM2, and can operate in the same manner as the transfer robot R1. The transfer robot R2 receives the substrate W that has been subjected to predetermined processing by the process module PM, and transfers the substrate W to the upper cassette LC. Storage is possible.
プロセスモジュールPMは、前述のように、下部プロセスモジュールLPMと上部プロセスモジュールUPMとから構成される。 As described above, the process module PM includes the lower process module LPM and the upper process module UPM.
下部プロセスモジュールLPM(図2)は、露光前の薬液塗布処理等を担う箇所であり、8個の移載ロボットR3〜R10と、6個の多段熱処理部11〜16と、4個の反射防止膜塗布処理ユニットBARC1〜BARC4と、4個のレジスト塗布処理ユニットSC1〜SC4とを主として備える。
The lower process module LPM (FIG. 2) is a part responsible for a chemical solution coating process before exposure, and includes eight transfer robots R3 to R10, six multistage
一方、上部プロセスモジュール(図3)は、露光後の現像処理等を担う箇所であり、8個の移載ロボットR11〜R18と、6個の多段熱処理部17〜22と、8個の現像処理ユニットSD1〜SD8とを主として備える。
On the other hand, the upper process module (FIG. 3) is a part responsible for development processing after exposure, and includes eight transfer robots R11 to R18, six multi-stage
なお、プロセスモジュールPMの中央部は閉空間になっており、上部プロセスモジュールUPMおよび下部プロセスモジュールLPMに共通したメンテナンスエリア41である。
The central portion of the process module PM is a closed space, and is a
下部プロセスモジュールLPMおよび上部プロセスモジュールUPMのいずれにおいても、3個の多段熱処理部と2個の移載ロボットとが交互に隣接配置された2つの列がx軸方向に形成されている。また、それぞれの列の両端の多段熱処理部において、y軸方向に列に垂直に移載ロボットがさらに隣接配置されている。また、後者の移載ロボットに隣接して、下部プロセスモジュールLPMにおいては反射防止膜塗布処理ユニットBARC1〜BARC4あるいはレジスト塗布処理ユニットSC1〜SC4のいずれか2個が、上部プロセスモジュールUPMにおいては現像処理ユニットSD1〜SD8が2個ずつ配置されている。 In both the lower process module LPM and the upper process module UPM, two rows in which three multi-stage heat treatment units and two transfer robots are alternately arranged are formed in the x-axis direction. Further, in the multistage heat treatment units at both ends of each row, transfer robots are further arranged adjacent to each other in the y-axis direction perpendicular to the row. Further, adjacent to the latter transfer robot, any two of the antireflection film coating units BARC1 to BARC4 or the resist coating units SC1 to SC4 are developed in the lower process module LPM, and the developing process is performed in the upper process module UPM. Two units SD1 to SD8 are arranged.
すなわち、下部プロセスモジュールLPMおよび上部プロセスモジュールUPMのいずれにおいても、2つの列における処理ユニット等の配置は全く同一であるので、それぞれの列において、同一の処理シーケンスが独立かつ並行して行われることが可能となっている。 That is, in both the lower process module LPM and the upper process module UPM, since the arrangement of the processing units and the like in the two columns is exactly the same, the same processing sequence is performed independently and in parallel in each column. Is possible.
移載ロボットR3〜R18には、それぞれにアームAM3〜AM18が備わっている。それぞれの移載ロボットR3〜R18はいずれも、図示を省略する駆動機構によるz軸方向の上下動、z軸を中心とした回転、アームAM3〜AM18の伸縮などを適宜組み合わせることにより、隣接配置された処理ユニット等との間で、基板Wの授受が可能となっている。ただし、移載ロボットR3〜R10は下部プロセスモジュールLPMの範囲内で、移載ロボットR11〜R18は上部プロセスモジュールUPMの範囲内でのみ上下動が可能である。移載ロボットR3〜R18は、水平面内を移動して基板Wを搬送することがないので、あるユニットにて基板Wを受け取ってから次のユニットに受け渡すまでの基板保持時間が短く、ユニット間にて基板を次々と移載することができる。また、水平方向の移動機構を要しないことから、構造を単純化することができる。なお、これらの移載ロボットR3〜R18については、同一の構造を持つものを用いてもよい。 The transfer robots R3 to R18 are provided with arms AM3 to AM18, respectively. All of the transfer robots R3 to R18 are arranged adjacent to each other by appropriately combining vertical movement in the z-axis direction by a drive mechanism (not shown), rotation around the z-axis, expansion and contraction of the arms AM3 to AM18, and the like. The substrate W can be exchanged with a processing unit or the like. However, the transfer robots R3 to R10 can move up and down only within the range of the lower process module LPM, and the transfer robots R11 to R18 can move up and down only within the range of the upper process module UPM. Since the transfer robots R3 to R18 do not move in the horizontal plane and carry the substrate W, the substrate holding time from receiving the substrate W in one unit to delivering it to the next unit is short. The substrates can be transferred one after another. Further, since a horizontal movement mechanism is not required, the structure can be simplified. In addition, about these transfer robots R3-R18, you may use what has the same structure.
多段熱処理部11〜22は、22個の加熱処理ユニットH1〜H22、16個の冷却処理ユニットC1〜C16、4個の疎水化処理ユニットA1〜A4、および基板Wの授受に用いられる12個のパスユニットP1〜P12のうちいくつかずつが組み合わされ、積層配置されることにより構成されている。それぞれの多段熱処理部11〜22によって、ユニットの組み合わされ方は異なっている。なお、それぞれの多段熱処理部11〜16において、各ユニットは実際には積層配置されているが、図2および図3においては、図示の都合上、個々の処理ユニットを平面的に配置されているがごとく示している。また、実際には積層配置されていることを強調するために、周囲に斜線を付している(以降も同様)。
The multi-stage
また、図2および図3においてそれぞれの処理ユニットの符号の側に付している矢印等は、座標軸の表記方法に準じた表記によって、各処理ユニットの開口方向を表している。これは、矢印の先端側に位置する移載ロボットが有するアームが当該処理ユニットにアクセスし、各処理ユニットとの間で基板を授受することが可能であることを示している。例えば、多段熱処理部11の冷却処理ユニットC1に対しては、移載ロボットR3のアームAM3と移載ロボットR4のアームAM4とがアクセス可能であり、多段熱処理部14の冷却処理ユニットC5に対しては、移載ロボットR7のアームAM7と、移載ロボットR8のアームAM8とがアクセス可能である。また、例えば移載ロボットR3のアームAM3は、多段熱処理部11の全てのユニットと、多段熱処理部12のうち、パスユニットP2および加熱処理ユニットH3〜H4にアクセス可能である。
2 and FIG. 3, arrows and the like attached to the reference numerals of the respective processing units represent the opening directions of the respective processing units by a notation according to the coordinate axis notation method. This indicates that the arm of the transfer robot located on the tip side of the arrow can access the processing unit and transfer the substrate to and from each processing unit. For example, the arm AM3 of the transfer robot R3 and the arm AM4 of the transfer robot R4 are accessible to the cooling processing unit C1 of the multistage
多段熱処理部11〜22を構成するそれぞれの処理ユニットのうち、パスユニットP1〜P12は、それぞれのパスユニットを含む多段熱処理部11〜22に隣接した2つの移載ロボット間にて基板Wの授受を行うために設けられている。パスユニットとしては、例えば、3点の支持ピンが設けられ、一方の移載ロボットのアームが当該支持ピン上に基板Wを載置し、もう一方の移載ロボットが当該基板Wを取り出すことによって基板を授受する態様などが考えられる。
Among the processing units constituting the multi-stage
加熱処理ユニットH1〜H22にはそれぞれ、基板Wを所定の温度にまで加熱し、あるいは高温度状態に維持する、いわゆるホットプレートが備わっている。冷却処理ユニットC1〜C16には、基板Wを所定の温度にまで冷却し、あるいは低温度状態に維持する、いわゆるクールプレートが備わっている。なお、冷却処理ユニットC1、C3〜C5、C7〜C9、C11、C14およびC16は、2方向からのアクセスが可能となっており、パスユニットとしての機能も兼ね備えている。 Each of the heat treatment units H1 to H22 includes a so-called hot plate that heats the substrate W to a predetermined temperature or maintains the substrate W at a high temperature state. The cooling processing units C1 to C16 include a so-called cool plate that cools the substrate W to a predetermined temperature or maintains the substrate W at a low temperature state. The cooling processing units C1, C3 to C5, C7 to C9, C11, C14, and C16 can be accessed from two directions and also have a function as a pass unit.
さらに、疎水化処理ユニットA1〜A4は、後の処理にて基板Wに塗布されるレジストあるいは反射防止膜と基板Wとの密着性強化を目的として、基板W表面を疎水化する処理を行うためのユニットである。 Further, the hydrophobizing units A1 to A4 perform a process of hydrophobizing the surface of the substrate W for the purpose of enhancing the adhesion between the resist or antireflection film applied to the substrate W in the subsequent process and the substrate W. Unit.
下部プロセスモジュールLPMにさらに備わる反射防止膜塗布処理ユニットBARC1〜BARC4は、ステッパSTPにおける露光時のUV光の反射を防止するための反射防止膜を基板表面に塗布するユニットである。レジスト塗布処理ユニットSC1〜SC4は、基板を回転させつつその基板主面にフォトレジストを滴下することによって均一なレジスト塗布を行う、いわゆるスピンコータである。 The antireflection film coating units BARC1 to BARC4 further provided in the lower process module LPM are units for coating an antireflection film for preventing reflection of UV light during exposure in the stepper STP on the substrate surface. The resist coating processing units SC1 to SC4 are so-called spin coaters that perform uniform resist coating by dropping a photoresist onto the main surface of the substrate while rotating the substrate.
上部プロセスモジュールUPMにさらに備わる現像処理ユニットSD1〜SD8は、露光後の基板上に現像液を供給することによって現像処理を行う、いわゆるスピンデベロッパである。 The development processing units SD1 to SD8 further provided in the upper process module UPM are so-called spin developers that perform development processing by supplying a developer onto the substrate after exposure.
インタフェースIFは、下部インタフェースLIFと上部インタフェースUIFとの間で上下動可能な2個の移載ロボットR19およびR20を備えているほか、下部インタフェースLIFに2個のエッジ露光部31および32と、バッファカセットBF1と、移載ロボットR21とを備えており、上部インタフェースUIFに、多段露光後熱処理部33および34と、バッファカセットBF2と、移載ロボットR22とを備えている。
The interface IF includes two transfer robots R19 and R20 that can move up and down between the lower interface LIF and the upper interface UIF. In addition, the lower interface LIF includes two
移載ロボットR19およびR20は、プロセスモジュールPMにて用いられている移載ロボットR3〜R18と同様の構造および機能を有するロボットであるが、移載ロボットR3〜R18がいずれも上部プロセスモジュールUPMあるいは下部プロセスモジュールLPMの範囲内でのみ上下動が可能であるのに対して、インタフェースIFの移載ロボットR19およびR20は、上部インタフェースUIFと下部インタフェースLIFとの間で自在に上下動可能である点で相異している。すなわち、移載ロボットR19およびR20は、下部プロセスモジュールLPMにてレジスト塗布処理がされた露光前の基板Wを受け取る役割と、ステッパSTPにて露光処理された基板Wを上部プロセスモジュールUPMへ受け渡す役割とを兼ね備えている。 The transfer robots R19 and R20 have the same structure and function as the transfer robots R3 to R18 used in the process module PM. However, the transfer robots R3 to R18 are all the upper process module UPM or While the robot can move up and down only within the range of the lower process module LPM, the transfer robots R19 and R20 of the interface IF can freely move up and down between the upper interface UIF and the lower interface LIF. It is different. That is, the transfer robots R19 and R20 receive the substrate W before exposure subjected to the resist coating process in the lower process module LPM and deliver the substrate W exposed in the stepper STP to the upper process module UPM. It also has a role.
エッジ露光部31および32は、それぞれに2個のエッジ露光ユニットE1およびE2、E3およびE4を備えている。エッジ露光ユニットE1〜E4は、基板端縁部の不要なレジスト膜を除去するエッジ露光処理を行うためのユニットである。なお、エッジ露光部31には、移載ロボットR19のみにてアクセス可能であり、エッジ露光部32には、移載ロボットR20のみにてアクセス可能である。
Each of the
バッファカセットBF1およびBF2は、後段の処理に際して処理待ちとなる基板Wを収納するためのものである。バッファカセットBF1には、ステッパSTPにおける露光処理待ちの基板Wが収納され、バッファカセットBF2には、ステッパSTPにおいて露光処理された後の基板Wが収納される。 The buffer cassettes BF1 and BF2 are for storing the substrates W that are waiting for processing in the subsequent processing. The buffer cassette BF1 stores a substrate W waiting for exposure processing in the stepper STP, and the buffer cassette BF2 stores the substrate W after exposure processing in the stepper STP.
移載ロボットR21およびR22は、ステッパSTPとの間で基板の授受を行うためのロボットであり、インデクサIDに備わる移載ロボットR1およびR2と同様の構造および機能を有している。移載ロボットR21は、バッファカセットBF1に収納されている露光処理前の基板WをアームAM21によって取り出し、y方向に適宜移動した後、ステッパSTPに当該基板Wを受け渡す。移載ロボットR22は、露光処理がされた基板WをステッパSTPから受け取り、これをバッファカセットBF2に収納する。 The transfer robots R21 and R22 are robots for exchanging substrates with the stepper STP, and have the same structure and function as the transfer robots R1 and R2 provided in the indexer ID. The transfer robot R21 takes out the substrate W before exposure processing stored in the buffer cassette BF1 by the arm AM21, moves it appropriately in the y direction, and then delivers the substrate W to the stepper STP. The transfer robot R22 receives the substrate W subjected to the exposure process from the stepper STP and stores it in the buffer cassette BF2.
多段露光後熱処理部33および34は、ステッパSTPによって露光処理された基板Wに対しベーキング処理およびその後の冷却処理を行うために設けられている。多段露光後熱処理部33は、3つの露光後ベークユニットB1〜B3と3つの冷却処理ユニットC21〜C23とを備える。多段露光後熱処理部34は、同様に露光後ベークユニットB4〜B6と冷却処理ユニットC24〜C26とを備える。
The multi-stage post-exposure
露光後ベークユニットB1〜B6は、露光された基板Wのレジストの触媒反応を促進することを目的とするベーキング処理を行うユニットである。一方、冷却処理ユニットC21〜C26は、基板Wのベーキング処理を速やかに終了させるために、クールプレートにて基板Wを冷却するユニットである。これらの処理がなされた基板Wに対し、上部プロセスモジュールUPMにて現像処理が行われる。 The post-exposure baking units B1 to B6 are units that perform a baking process for the purpose of promoting the catalytic reaction of the resist on the exposed substrate W. On the other hand, the cooling processing units C21 to C26 are units that cool the substrate W with a cool plate in order to quickly finish the baking processing of the substrate W. Development processing is performed in the upper process module UPM on the substrate W subjected to these processes.
なお、プロセスモジュールPMおよびインタフェースIFには、図示を省略するファンフィルタユニットが各処理ユニットごとに、あるいはいくつかの処理ユニットに共通に機能するように備わっており、これにより、各処理ユニットに清浄化空気が供給される。 The process module PM and the interface IF are provided with a fan filter unit (not shown) so as to function in common with each processing unit or with several processing units. Converted air is supplied.
以上に説明したような構成をとることで、基板処理装置1おいては、高い処理能力が具備されるとともに、平面占有面積の増大の抑制が図られている。
By adopting the configuration as described above, the
<基板処理フロー>
以下、上述のような構成をとる基板処理装置1において、どのような処理シーケンスにて基板Wにおける回路パターンの形成がなされるのか、および、その際に基板がどのように搬送されていくのかを説明する。図4は、基板処理装置1の下段部LFにおいてなされる、一連の処理についてのフローを示す図である。図5は、基板処理装置1の上段部UFにおいてなされる、一連の処理についてのフローを示す図である。なお、図4および図5においては、各処理ユニット間で移載を担う移載ロボットの符号を、矢印の近傍に付している。
<Substrate processing flow>
Hereinafter, in the
図4に示す下段部LFにおける処理は、ステッパSTPにおける露光処理の前段になされる処理である。まず、移載ロボットR1が、下部インデクサLIDの下部カセットLCから基板を取り出し、パスユニットP1あるいはP4に載置する(ステップS1)。以降、基板Wがどちらのパスユニットに載置されたかによって、当該基板Wに対し処理を施す処理ユニットは異なるが、なされる処理そのものはどちらの場合でも全く同一であるので、移載ロボットR1がパスユニットP1に基板Wを載置した場合のみ説明する。 The process in the lower part LF shown in FIG. 4 is a process performed before the exposure process in the stepper STP. First, the transfer robot R1 takes out the substrate from the lower cassette LC of the lower indexer LID and places it on the pass unit P1 or P4 (step S1). Thereafter, the processing unit that performs processing on the substrate W differs depending on which pass unit the substrate W is placed on, but the processing itself is exactly the same in either case. Only the case where the substrate W is placed on the pass unit P1 will be described.
パスユニットP1に載置された基板Wは、移載ロボットR2によって疎水化処理ユニットA1あるいはA2に移載され、疎水化処理を施される(ステップS2)。疎水化処理を受けた基板Wは、冷却処理ユニットC1を経た後(ステップS3)、反射防止膜塗布処理ユニットBARC1あるいはBARC2に移載されて、裏面に反射防止膜を塗布される(ステップS4)。 The substrate W placed on the pass unit P1 is transferred to the hydrophobic treatment unit A1 or A2 by the transfer robot R2, and subjected to the hydrophobic treatment (step S2). The substrate W that has undergone the hydrophobic treatment passes through the cooling processing unit C1 (step S3), and is then transferred to the antireflection film coating processing unit BARC1 or BARC2, and an antireflection film is applied to the back surface (step S4). .
反射防止膜を塗布された基板Wは、再び冷却処理ユニットC1を経て(ステップS5)、加熱処理ユニットH1〜H4のいずれかにおいて、レジストの密着性強化のための加熱処理(脱水ベーク)を受ける(ステップ6)。その後、パスユニットP2、および冷却処理ユニットC3あるいはC4を経て(ステップS7、S8)、レジスト塗布処理ユニットSC1あるいはSC2に載置され、レジスト塗布処理を施される(ステップS9)。 The substrate W coated with the antireflection film again passes through the cooling processing unit C1 (step S5) and is subjected to heat treatment (dehydration bake) for enhancing the adhesion of the resist in any of the heat treatment units H1 to H4. (Step 6). Then, after passing through the pass unit P2 and the cooling processing unit C3 or C4 (steps S7 and S8), it is placed on the resist coating processing unit SC1 or SC2 and subjected to resist coating processing (step S9).
レジスト塗布処理がなされた基板Wは、再び冷却処理ユニットC3あるいはC4を経た後(ステップS10)、加熱処理ユニットH5〜H9のいずれかにおいて塗布膜中の溶剤除去やレジスト密着性強化を目的とした加熱処理(プリベーク)が施され(ステップS11)、さらに、冷却処理ユニットC2にて冷却処理がなされる(ステップS12)。 The substrate W on which the resist coating process has been performed passes through the cooling processing unit C3 or C4 again (step S10), and then aims to remove the solvent in the coating film or enhance the resist adhesion in any of the heat processing units H5 to H9. Heat treatment (pre-baking) is performed (step S11), and further, cooling processing is performed in the cooling processing unit C2 (step S12).
このようにしてレジスト塗布を施された基板Wは、パスユニットP3を介して下部インタフェースLIFに受け渡され(ステップS13)、エッジ露光ユニットE1あるいはE2にて、エッジ露光を施される(ステップS14)。エッジ露光がなされた基板Wは、いったんバッファカセットBF1に収納され(ステップS15)、その後、移載ロボットR21によってステッパSTPへと受け渡されて、露光処理を受けることとなる。 The substrate W thus coated with the resist is transferred to the lower interface LIF via the pass unit P3 (step S13), and is subjected to edge exposure in the edge exposure unit E1 or E2 (step S14). ). The substrate W subjected to the edge exposure is once stored in the buffer cassette BF1 (step S15), and then transferred to the stepper STP by the transfer robot R21 to be subjected to an exposure process.
図5に示す上段部UFにおける処理は、ステッパSTPにおける露光処理の後段になされる処理である。移載ロボットR22がステッパSTPから受け取った露光処理後の基板Wは、まずバッファカセットBF2に収納される(ステップS21)。その後、移載ロボットR19あるいはR20が、バッファカセットBF2から基板Wを取り出す。以降、基板Wがどちらの移載ロボットにより取り出されたかによって、当該基板Wに対し処理を施す処理ユニットは異なるものの、なされる処理そのものはどちらの場合でも全く同一であるので、移載ロボットR19が基板Wを取り出した場合のみ説明する。 The process in the upper stage UF shown in FIG. 5 is a process performed after the exposure process in the stepper STP. The exposed substrate W received by the transfer robot R22 from the stepper STP is first stored in the buffer cassette BF2 (step S21). Thereafter, the transfer robot R19 or R20 takes out the substrate W from the buffer cassette BF2. Thereafter, although the processing unit for processing the substrate W differs depending on which transfer robot the substrate W is taken out by, the processing itself is exactly the same in either case. Only when the substrate W is taken out will be described.
移載ロボットR19に取り出された基板Wは、露光後ベークユニットB1〜B3のいずれかにおける露光後ベークに供され(ステップS22)、さらに引き続き冷却処理ユニットにより冷却される(ステップS23)。 The substrate W taken out by the transfer robot R19 is subjected to post-exposure baking in any of the post-exposure baking units B1 to B3 (step S22), and further cooled by the cooling processing unit (step S23).
その後、基板WはパスユニットP7に載置された(ステップS24)基板Wは、現像処理ユニットSD1〜SD4のいずれかによって現像処理を施されることになるが、どの現像処理ユニットにて現像処理がなされるかによって、その後の処理フローが異なってくる。 Thereafter, the substrate W is placed on the pass unit P7 (step S24). The substrate W is subjected to development processing by any of the development processing units SD1 to SD4, and in which development processing unit the development processing is performed. The subsequent processing flow differs depending on whether or not is performed.
現像処理ユニットSD1あるいはSD2のいずれかにて現像処理がなされる場合、移載ロボットR11によってパスユニットP7から取り出された基板Wは、冷却処理ユニットC9を経て(ステップS25)、現像処理ユニットSD1あるいはSD2に受け渡され、現像処理を施される(ステップS26)。 When development processing is performed in either the development processing unit SD1 or SD2, the substrate W taken out from the pass unit P7 by the transfer robot R11 passes through the cooling processing unit C9 (step S25), and then the development processing unit SD1 or It is transferred to SD2 and subjected to development processing (step S26).
現像処理を施された基板Wは、再び冷却処理ユニットC9を経た後(ステップS27)、加熱処理ユニットH19において、レジスト硬化のための加熱処理(ポストベーク)を受ける(ステップS28)。 The substrate W that has undergone development processing passes through the cooling processing unit C9 again (step S27), and then undergoes heat processing (post-bake) for resist curing in the heat processing unit H19 (step S28).
その後、冷却処理ユニットC10にて冷却処理を施された(ステップS29)基板Wは、パスユニットP8およびP9を経て(ステップS30、S31)上部インデクサUIDに受け渡され、移載ロボットR2によって上部カセットUCのいずれかに収納される(ステップS38)。 Thereafter, the substrate W that has been subjected to the cooling process in the cooling unit C10 (step S29) is passed to the upper indexer UID via the pass units P8 and P9 (steps S30 and S31), and is transferred to the upper cassette by the transfer robot R2. It is stored in one of the UCs (step S38).
一方、基板Wに対する現像処理が、現像処理ユニットSD3あるいはSD4のいずれかにてなされる場合、移載ロボットR11によってパスユニットP7から取り出された基板Wは、さらにパスユニットP8および冷却処理ユニットC11を経て(ステップS32、S33)、現像処理ユニットSD3あるいはSD4に受け渡され、現像処理を施される(ステップS34)。そして、再び冷却処理ユニットC11を経た後(ステップS35)、加熱処理ユニットH20におけるポストベーク(ステップS36)、さらには冷却処理ユニットC12における冷却処理を経た後(ステップS37)、パスユニットP9を介して上部インデクサUIDに受け渡され、やはり上部カセットUCのいずれかに収納される(ステップS38)。 On the other hand, when the development processing for the substrate W is performed in either the development processing unit SD3 or SD4, the substrate W taken out from the pass unit P7 by the transfer robot R11 further passes the pass unit P8 and the cooling processing unit C11. Then (steps S32 and S33), the image is transferred to the development processing unit SD3 or SD4 and subjected to development processing (step S34). Then, after passing through the cooling processing unit C11 again (step S35), after the post-baking in the heating processing unit H20 (step S36) and further through the cooling processing in the cooling processing unit C12 (step S37), via the pass unit P9. It is delivered to the upper indexer UID and stored in one of the upper cassettes UC (step S38).
以上で説明したように、下段部LFおよび上段部UFにおける処理フローには、いずれも途中にて、2つの独立かつ同一の処理シーケンスを並行して行う処理フローが存在する。上段部UFにおいては、一部にてそれぞれがさらに並行した2つのフローに分岐している。これらにより、処理可能な側のフローにて基板Wを処理することが可能となり、基板Wの処理待ちを低減でき、単位時間あたりの処理能力を高めることができる。 As described above, the processing flows in the lower part LF and the upper part UF include processing flows in which two independent and identical processing sequences are performed in parallel. In the upper stage UF, each part is further branched into two parallel flows. As a result, the substrate W can be processed in the processable flow, the waiting time for processing the substrate W can be reduced, and the processing capability per unit time can be increased.
また、各処理ユニット間にて基板を移載するそれぞれの移載ロボットは、個々配置箇所ごとにその役割および動作範囲が限定されており、その範囲内において独立した動作が可能であるので、処理が飽和しないという限度内において、同時かつ並行に動作し、間断なく基板Wの授受を行うことができる。これにより、各処理ユニットにおいて並行して間断なく処理を行うことができ、単位時間あたりの処理効率を高めることができる。 In addition, each transfer robot that transfers a substrate between each processing unit has a limited role and operation range for each individual placement location, and can operate independently within that range. In the limit that does not saturate, the substrates W operate simultaneously and in parallel, and the substrate W can be transferred without interruption. Thereby, processing can be performed in parallel in each processing unit without interruption, and the processing efficiency per unit time can be improved.
<変形例>
上段部UFと下段部LFの機能は、入れ替わってもよい。すなわち、上段部UFにてレジスト塗布処理等がなされ、下段部LFにて現像処理がなされる構成であってもよい。あるいは、処理経路をさらに備え、これらが多段に配置されていてもよい。
<Modification>
The functions of the upper stage UF and the lower stage LF may be interchanged. That is, a configuration in which a resist coating process or the like is performed in the upper stage UF and a development process is performed in the lower stage LF may be employed. Alternatively, a processing path may be further provided, and these may be arranged in multiple stages.
各処理ユニットおよび移載ロボットの個数および配置は、上述の例に限定されず、目的とする処理に合わせて適宜変更されてよい。あるいは、検査機能を備えた処理ユニットが配置されてもよい。 The number and arrangement of each processing unit and transfer robot are not limited to the above-described example, and may be appropriately changed according to the target processing. Or the processing unit provided with the test | inspection function may be arrange | positioned.
1 基板処理装置
11〜22 多段熱処理部
31、32 エッジ露光部
33、34 多段露光後熱処理部
41 メンテナンスエリア
A1〜A4 疎水化処理ユニット
AM1〜AM22 アーム
B1〜B6 露光後ベークユニット
BARC1〜BARC4 反射防止膜塗布処理ユニット
BF1、BF2 バッファカセット
C カセット
C1〜C16、C21〜C26 冷却処理ユニット
E1〜E4 エッジ露光ユニット
H1〜H22 加熱処理ユニット
ID インデクサ
IF インタフェース
P1〜P12 パスユニット
PM プロセスモジュール
R1〜R22 移載ロボット
S1〜S38 ステップ
SC1〜SC4 レジスト塗布処理ユニット
SD1〜SD8 現像処理ユニット
W 基板
DESCRIPTION OF
Claims (1)
それぞれが複数の処理ユニットを含むユニット群を有し、所定の基板処理シーケンスに係る処理を行う複数のプロセス部が積層配置されてなり、
前記複数のプロセス部が少なくとも、前記基板処理シーケンスとして薬液膜の形成を行う第1のプロセス部と基板に形成された露光パターンの現像を行う第2のプロセス部とを有してなり、
前記複数のプロセス部がいずれも、
それぞれにおいて前記ユニット群に含まれる少なくとも1つのユニットが配置された複数のユニット配置部と、
前記複数のユニット配置部の間に設けられ、基板の受け渡しを行う受け渡し手段と、
前記プロセス部において処理待ち状態の基板を収容可能な収容手段と、
を備えることを特徴とする基板処理装置。 A substrate processing apparatus,
Each has a unit group including a plurality of processing units, and a plurality of process units that perform processing according to a predetermined substrate processing sequence are arranged in a stack,
The plurality of process units include at least a first process unit that forms a chemical film as the substrate processing sequence and a second process unit that develops an exposure pattern formed on the substrate,
Each of the plurality of process units is
A plurality of unit arrangement portions each including at least one unit included in the unit group;
A delivery means that is provided between the plurality of unit arrangement portions and delivers the substrate;
Storage means capable of storing a substrate waiting to be processed in the process section;
A substrate processing apparatus comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007157723A JP2007227984A (en) | 2007-06-14 | 2007-06-14 | Substrate processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007157723A JP2007227984A (en) | 2007-06-14 | 2007-06-14 | Substrate processing apparatus |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002169556A Division JP2004014966A (en) | 2002-06-11 | 2002-06-11 | Substrate-processing apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007227984A true JP2007227984A (en) | 2007-09-06 |
Family
ID=38549397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007157723A Pending JP2007227984A (en) | 2007-06-14 | 2007-06-14 | Substrate processing apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007227984A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9165807B2 (en) | 2007-06-29 | 2015-10-20 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with vertical treatment arrangement including vertical blowout and exhaust units |
| US9184071B2 (en) | 2007-11-30 | 2015-11-10 | Screen Semiconductor Solutions Co., Ltd. | Multi-story substrate treating apparatus with flexible transport mechanisms and vertically divided treating units |
| US9299596B2 (en) | 2007-12-28 | 2016-03-29 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with parallel substrate treatment lines simultaneously treating a plurality of substrates |
| US9368383B2 (en) | 2007-12-28 | 2016-06-14 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with substrate reordering |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0846010A (en) * | 1994-08-04 | 1996-02-16 | Tokyo Electron Ltd | Treatment system |
| JPH1187456A (en) * | 1997-09-12 | 1999-03-30 | Dainippon Screen Mfg Co Ltd | Apparatus for treating substrate |
| JPH11251399A (en) * | 1998-02-27 | 1999-09-17 | Dainippon Screen Mfg Co Ltd | Device for processing substrate |
| JP2000124129A (en) * | 1998-08-14 | 2000-04-28 | Tokyo Electron Ltd | Processing apparatus |
| JP2001077176A (en) * | 1999-07-02 | 2001-03-23 | Tokyo Electron Ltd | Substrate processing apparatus |
| JP2001093827A (en) * | 1999-07-16 | 2001-04-06 | Tokyo Electron Ltd | Treatment system |
| JP2001093828A (en) * | 2000-07-14 | 2001-04-06 | Tokyo Electron Ltd | Treatment system |
| JP2001168004A (en) * | 1999-12-08 | 2001-06-22 | Tokyo Electron Ltd | Wafer treating device |
| JP2001176792A (en) * | 1999-12-06 | 2001-06-29 | Dns Korea Co Ltd | Lithography system in semiconductor manufacturing |
| JP2001189369A (en) * | 1999-10-19 | 2001-07-10 | Tokyo Electron Ltd | Substrate treatment apparatus |
-
2007
- 2007-06-14 JP JP2007157723A patent/JP2007227984A/en active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0846010A (en) * | 1994-08-04 | 1996-02-16 | Tokyo Electron Ltd | Treatment system |
| JPH1187456A (en) * | 1997-09-12 | 1999-03-30 | Dainippon Screen Mfg Co Ltd | Apparatus for treating substrate |
| JPH11251399A (en) * | 1998-02-27 | 1999-09-17 | Dainippon Screen Mfg Co Ltd | Device for processing substrate |
| JP2000124129A (en) * | 1998-08-14 | 2000-04-28 | Tokyo Electron Ltd | Processing apparatus |
| JP2001077176A (en) * | 1999-07-02 | 2001-03-23 | Tokyo Electron Ltd | Substrate processing apparatus |
| JP2001093827A (en) * | 1999-07-16 | 2001-04-06 | Tokyo Electron Ltd | Treatment system |
| JP2001189369A (en) * | 1999-10-19 | 2001-07-10 | Tokyo Electron Ltd | Substrate treatment apparatus |
| JP2001176792A (en) * | 1999-12-06 | 2001-06-29 | Dns Korea Co Ltd | Lithography system in semiconductor manufacturing |
| JP2001168004A (en) * | 1999-12-08 | 2001-06-22 | Tokyo Electron Ltd | Wafer treating device |
| JP2001093828A (en) * | 2000-07-14 | 2001-04-06 | Tokyo Electron Ltd | Treatment system |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9165807B2 (en) | 2007-06-29 | 2015-10-20 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with vertical treatment arrangement including vertical blowout and exhaust units |
| US9174235B2 (en) | 2007-06-29 | 2015-11-03 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus using horizontal treatment cell arrangements with parallel treatment lines |
| US9230834B2 (en) | 2007-06-29 | 2016-01-05 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus |
| US10290521B2 (en) | 2007-06-29 | 2019-05-14 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with parallel gas supply pipes and a gas exhaust pipe |
| US9184071B2 (en) | 2007-11-30 | 2015-11-10 | Screen Semiconductor Solutions Co., Ltd. | Multi-story substrate treating apparatus with flexible transport mechanisms and vertically divided treating units |
| US9687874B2 (en) | 2007-11-30 | 2017-06-27 | Screen Semiconductor Solutions Co., Ltd. | Multi-story substrate treating apparatus with flexible transport mechanisms and vertically divided treating units |
| US9299596B2 (en) | 2007-12-28 | 2016-03-29 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with parallel substrate treatment lines simultaneously treating a plurality of substrates |
| US9368383B2 (en) | 2007-12-28 | 2016-06-14 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with substrate reordering |
| US12217986B2 (en) | 2007-12-28 | 2025-02-04 | Screen Semiconductor Solutions Co., Ltd. | Substrate treating apparatus with parallel first and second parts of substrate treatment lines on multiple stories for simultaneously treating a plurality of substrates |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5267720B2 (en) | Coating, developing device, coating, developing method and storage medium | |
| US7980003B2 (en) | Heat processing apparatus and heat processing method | |
| US8023099B2 (en) | Substrate processing system and substrate processing method for double patterning with carrier block, process section, and interface block | |
| JP4170864B2 (en) | Substrate processing apparatus, substrate transport method and substrate processing method in substrate processing apparatus | |
| US8236132B2 (en) | Substrate processing system and substrate transfer method | |
| JPH1092733A (en) | Treatment system | |
| JP4401879B2 (en) | Substrate recovery method and substrate processing apparatus | |
| JP2009010287A (en) | Processing system for substrate | |
| JP2002217267A (en) | Substrate-processing device | |
| JP4687682B2 (en) | Coating and developing apparatus and method, and storage medium | |
| US10201824B2 (en) | Substrate processing apparatus and substrate processing method | |
| US7678417B2 (en) | Coating method and coating apparatus | |
| JPH1079343A (en) | Processing system and application and development processing system | |
| US7575382B2 (en) | Coating/developing apparatus and operation method thereof | |
| TWI545674B (en) | A substrate processing apparatus, a substrate processing method, and a substrate processing system | |
| JP4080405B2 (en) | Substrate processing equipment | |
| JP2007227984A (en) | Substrate processing apparatus | |
| US9685357B2 (en) | Apparatus for treating substrate | |
| JP2004014966A (en) | Substrate-processing apparatus | |
| JP2013098476A (en) | Substrate processing system, substrate transfer method, program, and computer storage medium | |
| KR101018525B1 (en) | Substrate processing apparatus and substrate processing method | |
| JP2004087675A (en) | Substrate treating device | |
| JP2010192559A (en) | Substrate processing system | |
| JP4606159B2 (en) | Substrate processing apparatus, substrate processing method, computer program, and storage medium | |
| JP2004214290A (en) | Substrate processing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070615 |
|
| RD04 | Notification of resignation of power of attorney |
Effective date: 20091217 Free format text: JAPANESE INTERMEDIATE CODE: A7424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100622 |
|
| A521 | Written amendment |
Effective date: 20100817 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101012 |
|
| A521 | Written amendment |
Effective date: 20101210 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110125 |