JP2007202880A - 歩行器 - Google Patents
歩行器 Download PDFInfo
- Publication number
- JP2007202880A JP2007202880A JP2006026512A JP2006026512A JP2007202880A JP 2007202880 A JP2007202880 A JP 2007202880A JP 2006026512 A JP2006026512 A JP 2006026512A JP 2006026512 A JP2006026512 A JP 2006026512A JP 2007202880 A JP2007202880 A JP 2007202880A
- Authority
- JP
- Japan
- Prior art keywords
- frame
- user
- walker
- upper frame
- bed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Special Chairs (AREA)
- Rehabilitation Tools (AREA)
Abstract
【課題】患者を抱え上げることなく、サークル型の歩行器に乗せることを可能にする。
【解決手段】サークル型フレーム10は、キャスター4を具えた下フレーム2と、該下フレームに対して昇降可能に配備され後部側から使用者がフレーム10に入り込み可能な開放部31を有する上フレーム3を含み、患者が跨る支え部材6を上フレーム3に着脱可能に取り付けている。支え部材6を患者の尻91に敷いてから該支え部材をフレーム10に係止し、支え部材6を、患者の足の筋肉を鍛えるために最も効果的な高さ位置にセットできる。
【選択図】図1
【解決手段】サークル型フレーム10は、キャスター4を具えた下フレーム2と、該下フレームに対して昇降可能に配備され後部側から使用者がフレーム10に入り込み可能な開放部31を有する上フレーム3を含み、患者が跨る支え部材6を上フレーム3に着脱可能に取り付けている。支え部材6を患者の尻91に敷いてから該支え部材をフレーム10に係止し、支え部材6を、患者の足の筋肉を鍛えるために最も効果的な高さ位置にセットできる。
【選択図】図1
Description
本発明は、身体障害者のリハビリテーション(以下、「リハビリ」とする)や、足腰の弱い人の歩行補助に適した歩行器に関する。
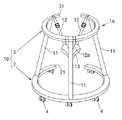
図4、図5に示す如く、この種歩行器(1a)として、使用者の周囲を取り囲むことができ下部にキャスター(4)を具えたフレーム(10)と、3本の吊下げベルト(12a)(12)(12)によってフレーム(10)に吊り下げられたサドル(13)とによって構成されたものが提案されている(特許文献1)。
フレーム(10)は、夫々後部に使用者が出入可能な開放部(21)(31)を具えた略リング状の下フレーム(2)と上フレーム(3)を、3本の縦柱(11)(11)(11)で連結して形成されている。
フレーム(10)は、夫々後部に使用者が出入可能な開放部(21)(31)を具えた略リング状の下フレーム(2)と上フレーム(3)を、3本の縦柱(11)(11)(11)で連結して形成されている。
介助者(図示せず)が使用者(9)を支えながら、開放されたフレーム(10)の後部側からフ
レーム(10)内に進入させ、上フレーム(3)を掴ませて使用者(9)をフレーム(10)に立たせる。
3本の吊下げベルト(12)(12)(12a)の内、後部2本の吊りベルト(12)(12)によって上フレーム(3)に吊り下げられた状態のサドル(13)を持ち上げて使用者(9)の股の間に入れながら、前部の吊りベルト(12a)を上フレーム(3)に連結し、水平状態となったサドル(13)に使用者(9)を着座させる。
この状態で、使用者(9)が足を少しずつ動かすと、キャスター(4)が取り付けられたフフレーム(10)は容易に前進し、この動作を繰り返し行うことによって、使用者(9)の歩行機能の回復が望める。
レーム(10)内に進入させ、上フレーム(3)を掴ませて使用者(9)をフレーム(10)に立たせる。
3本の吊下げベルト(12)(12)(12a)の内、後部2本の吊りベルト(12)(12)によって上フレーム(3)に吊り下げられた状態のサドル(13)を持ち上げて使用者(9)の股の間に入れながら、前部の吊りベルト(12a)を上フレーム(3)に連結し、水平状態となったサドル(13)に使用者(9)を着座させる。
この状態で、使用者(9)が足を少しずつ動かすと、キャスター(4)が取り付けられたフフレーム(10)は容易に前進し、この動作を繰り返し行うことによって、使用者(9)の歩行機能の回復が望める。
上記歩行器(1a)は、介助者が使用者(9)を立たせてフレーム(10)内に導かねばならないため、立つことのできない者が使用するには、複数の介助者を必要とし、少なくとも一人の介助者は使用者を抱えてフレーム(10)内に導き、使用者を抱えたまま立ち姿勢をとらせ、少なくとも別の介助者がサドルをセットしなければならない。
介助者が使用者をベッドから抱え上げてフレーム(10)内に案内し、さらにさのまま立ち姿勢を取らせる様に介助することは、介助者と使用者の双方にとって、労力や、肉体的負担は大きい。
特に、使用者が身体障害者や、足腰の弱った弱者であるから、抱え上げられることの肉体的負担に耐えられず、折角の歩行器が使用できないことも往々にしてある。
介助者が使用者をベッドから抱え上げてフレーム(10)内に案内し、さらにさのまま立ち姿勢を取らせる様に介助することは、介助者と使用者の双方にとって、労力や、肉体的負担は大きい。
特に、使用者が身体障害者や、足腰の弱った弱者であるから、抱え上げられることの肉体的負担に耐えられず、折角の歩行器が使用できないことも往々にしてある。
本発明は、歩行器を使用しようとする者を、ベッドの端からベッドの外に足を投げ出した姿勢のまま、歩行器に載せることを可能にして、介助者と患者の双方の負担を減らすと共に、歩行するのに重度の障害を持つ者でも、リハビリが可能な歩行器を明らかにするものである。
請求項1の歩行器は、使用者(9)の周囲を取り囲むことができ下端部にキャスター(4)を具えたフレーム(10)と、該フレーム(10)に取り付けられ尻(91)を載せて使用者(9)を吊り支える支え部材(6)を具えた歩行器において、
フレーム(10)は、キャスター(4)を具えた下フレーム(2)と、該下フレーム(2)に対して昇降可能に配備され後部側から使用者(9)がフレーム(10)に入り込み可能な開放部(31)を有する上フレーム(3)を含み、上フレーム(3)は昇降駆動装置(5)に連繋されており、支え部材(6)は、使用者(9)の尻(91)を載せることができると共に使用者(9)の足(92)を床へ投げ出すことを許す形状の柔軟性を有するシート片(61)と該シート片(61)の複数箇所に設けられ前記上フレーム(3)に着脱可能に取付けできる取付け部(62)とによって構成されている。
フレーム(10)は、キャスター(4)を具えた下フレーム(2)と、該下フレーム(2)に対して昇降可能に配備され後部側から使用者(9)がフレーム(10)に入り込み可能な開放部(31)を有する上フレーム(3)を含み、上フレーム(3)は昇降駆動装置(5)に連繋されており、支え部材(6)は、使用者(9)の尻(91)を載せることができると共に使用者(9)の足(92)を床へ投げ出すことを許す形状の柔軟性を有するシート片(61)と該シート片(61)の複数箇所に設けられ前記上フレーム(3)に着脱可能に取付けできる取付け部(62)とによって構成されている。
請求項2は請求項1の歩行器において、シート片(61)は滑りのよい素材で形成され、或いは滑り易い表面加工が施されている。
請求項3は請求項1又は2の歩行器において、下フレーム(2)と上フレーム(3)との間には、使用者のベッドの端部を挟む様にしてフレーム(10)をベッド(8)に突っ込むことが可能な様に、フレーム(10)の前後方向の略中央部から後方にはベッドに衝突する邪魔部材が存在していない。
請求項1の歩行器は、支え部材(6)をフレーム(10)から完全に外すことができるから、ベッド(8)の端からベッドの外に足を投げ出した姿勢の使用者の尻(91)とベッド(8)との間に、支え部材(6)のシート片(61)を滑り込ませてから、歩行器(1)を可及的にベッドに接近させて、支え部材(6)をその取付け部(62)によって歩行器(1)の上フレーム(3)に取り付ける。
昇降駆動装置(5)によって上フレーム(3)を上昇させると、支え部材(6)も上昇し、支え部材(6)上の使用者の尻(91)はベッドから浮上する。
歩行器(1)をベッド(8)から離して、使用者(9)が歩行訓練するのに最適の高さに支え部材(6)の高さ、即ち、使用者(9)の尻(91)の高さ位置を調節する。
昇降駆動装置(5)によって上フレーム(3)を上昇させると、支え部材(6)も上昇し、支え部材(6)上の使用者の尻(91)はベッドから浮上する。
歩行器(1)をベッド(8)から離して、使用者(9)が歩行訓練するのに最適の高さに支え部材(6)の高さ、即ち、使用者(9)の尻(91)の高さ位置を調節する。
上記動作において、使用者の障害が軽度であれば、介助者は、使用者の尻(91)の下に支え部材(6)のシート片(61)を滑り込ませること及び、支え部材(6)をフレーム(10)に取り付けることだけの介助で済む。使用者の障害が多少重度であっても、上記介助に加えて、使用者が後方に倒れることのない様に支えながら、使用者を乗せた歩行器(1)をベッド(8)から離す程度の介助で済む。
介助者が使用者を抱え上げて、歩行器内に導く動作は一切必要がなく、介助者、使用者の双方にとって、その労力や肉体的な負担は大きく軽減され、その分、使用者はリハビリに専念でき、介助者は、他の介助に気配りができる。
介助者が使用者を抱え上げて、歩行器内に導く動作は一切必要がなく、介助者、使用者の双方にとって、その労力や肉体的な負担は大きく軽減され、その分、使用者はリハビリに専念でき、介助者は、他の介助に気配りができる。
請求項2の歩行器は、支え部材(6)のシート片(61)の滑りがよいから、ベッド(8)と使用者(9)の尻(91)との間に、シート片(61)を楽に滑り込ませることができる。
請求項3の歩行器は、下フレーム(2)と上フレーム(3)によってベッド(8)の端部を挟む様にして歩行器(1)をベッド(8)に突っ込むことが出来るため、使用者(9)をベッド(8)から立ち上がらせることなく、支え部材(6)を歩行器(1)の上フレーム(3)に取り付けできる。
上記の様に、歩行器(1)の上フレーム(3)がベッド(8)に重なるほどにベッド(8)に接近させることが出来なくても、本発明の歩行器(1)は、使用者(9)を抱え上げることなく歩行器(1)に乗せることができる。即ち、支え部材(6)が上フレーム(3)から完全に取り外しできるから、支え部材(6)の取付け部(62)を長く形成しておく等の工夫により、使用者(9)が、尻下に支え部材(6)のシート片(61)を敷いてベッド(8)から足(92)を投げ出して坐った姿勢であっても、取付け部(62)を歩行器(1)の上フレーム(3)に取り付けることは可能である。但し、この場合、取付け部(62)が長くなる分だけ、リハビリ使用時の上フレーム(3)の高さ位置を高くする必要がある。
上記の様に、歩行器(1)の上フレーム(3)がベッド(8)に重なるほどにベッド(8)に接近させることが出来なくても、本発明の歩行器(1)は、使用者(9)を抱え上げることなく歩行器(1)に乗せることができる。即ち、支え部材(6)が上フレーム(3)から完全に取り外しできるから、支え部材(6)の取付け部(62)を長く形成しておく等の工夫により、使用者(9)が、尻下に支え部材(6)のシート片(61)を敷いてベッド(8)から足(92)を投げ出して坐った姿勢であっても、取付け部(62)を歩行器(1)の上フレーム(3)に取り付けることは可能である。但し、この場合、取付け部(62)が長くなる分だけ、リハビリ使用時の上フレーム(3)の高さ位置を高くする必要がある。
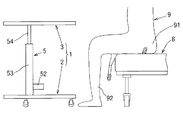
図1は、本発明の歩行器(1)の一例を示している。
歩行器(1)は、サークル状のフレーム(10)と、該フレーム(10)内に着脱可能に取り付けられ使用者(9)の尻(91)を載せて吊り支える支え部材(6)とによって構成される。
図1において、フレーム(10)から外した支え部材(6)を実線で示し、フレーム(10)に取り付けた支え部材(6)を破線で示す。
歩行器(1)は、サークル状のフレーム(10)と、該フレーム(10)内に着脱可能に取り付けられ使用者(9)の尻(91)を載せて吊り支える支え部材(6)とによって構成される。
図1において、フレーム(10)から外した支え部材(6)を実線で示し、フレーム(10)に取り付けた支え部材(6)を破線で示す。
フレーム(10)は、使用者(9)の周囲を取り囲み可能な大きさであり、3個以上のキャスター(4)を具えた下フレーム(2)と、該下フレーム(2)に対して昇降駆動装置(5)を介して昇降可能に配備された上フレーム(3)とによって構成される。
キャスター(4)は車輪の転がりを防止するロックレバーを具えている。
下フレーム(2)及び上フレーム(3)は一部に開放部(21)(31)を設けた円弧状に形成され、両開放部(21)(31)の位相は揃っており、開放部(31)(32)から使用者がフレーム(10)に入り込み可能である。
以下の説明で、上記フレーム(10)の開放部(21)(31)側を、歩行器(1)の「後側」、反対側を「前側」とする。
キャスター(4)は車輪の転がりを防止するロックレバーを具えている。
下フレーム(2)及び上フレーム(3)は一部に開放部(21)(31)を設けた円弧状に形成され、両開放部(21)(31)の位相は揃っており、開放部(31)(32)から使用者がフレーム(10)に入り込み可能である。
以下の説明で、上記フレーム(10)の開放部(21)(31)側を、歩行器(1)の「後側」、反対側を「前側」とする。
上フレーム(3)の開放部(31)には閉じ杆(33)が設けられる。閉じ杆(33)は、上フレーム(3)の円弧に連続する円弧状に形成され、一端が蝶番(34)によって上フレーム(3)の端部に取り付けられており、蝶番(34)を中心に閉じ杆(33)を起こすことにより、使用者がフレーム(10)内に入ることができる。
昇降駆動装置(5)は、上フレーム(3)を下フレーム(2)に対して平行状態を維持したまま昇降させるもので、実施例ではモータシリンダ(51)を用いた。モータシリンダ(51)は公知の如く、モータ(52)によってシリンダ(53)内の定位置のナット(図示せず)を回転させ、該ナットに螺合したピストン(54)をネジ推力で昇降させるものである。
モータ(52)には電源コード(図示せず)によって電源供給することも、フレーム(10)に小型バッテリー(図示せず)を搭載して電源供給することもできる。
実施例ではモータシリンダ(51)を歩行器(1)の左右に一基づつ設けている。両モータシリンダ(51)(51)は、同調制御部(図示せず)によって同調して動作する様に成されている。
モータ(52)には電源コード(図示せず)によって電源供給することも、フレーム(10)に小型バッテリー(図示せず)を搭載して電源供給することもできる。
実施例ではモータシリンダ(51)を歩行器(1)の左右に一基づつ設けている。両モータシリンダ(51)(51)は、同調制御部(図示せず)によって同調して動作する様に成されている。
モータシリンダ(51)の取付け位置は、フレーム(10)の前後方向に対して略中央部、或いはそれよりよりも前側に位置している。その理由は、歩行器(1)をベッド(8)側に後向きに移動させたとき、下フレーム(2)と上フレーム(3)によってベッド(8)の端部を挟む様にして歩行器(1)をベッド(8)に突っ込むことを可能にするためである。即ち、歩行器(1)のフレーム(10)には、前後方向の略中央部から後方にはベッド(8)に衝突する邪魔部材が存在しない。
上フレーム(3)には、前部中心の1箇所及び、後部の開放部(31)の両端に接近した2箇所の計3箇所に、支え部材(6)を取り付けるための掛り部(32)を設けている。
実施例の掛り部(32)は、上フレーム(3)に開設され上下方向に貫通した孔(35)である。
上フレーム(3)には、前記モータシリンダ(51)(51)の操作スイッチ(7)が配備されている。
スイッチ(7)は、使用者の右手或いは左手の何れか一方の自由が利かなくても操作できる様に、取付け位置を簡単に変更できることが望ましい。
実施例の掛り部(32)は、上フレーム(3)に開設され上下方向に貫通した孔(35)である。
上フレーム(3)には、前記モータシリンダ(51)(51)の操作スイッチ(7)が配備されている。
スイッチ(7)は、使用者の右手或いは左手の何れか一方の自由が利かなくても操作できる様に、取付け位置を簡単に変更できることが望ましい。
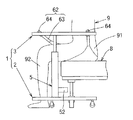
支え部材(6)は、使用者(9)の尻(91)を載せることができると共に使用者(9)の足(92)を床へ投げ出すことを許す形状の柔軟性を有するシート片(61)と、該シート片(61)に設けられ前記上フレーム(3)の各掛り部(32)に着脱可能に取付けできる取付け部(62)とによって構成される。
実施例のシート片(61)は、滑りの良い素材、或いは滑りを良好にする表面加工、例えばフッ素樹脂のコーティングが成された略三角形に形成され、各コーナに取付け部(62)を設けている。
実施例の取付け部(62)は、シート片(61)の各頂部を帯状に延長し、或いは別の帯布を接続して延長部(63)を形成し、該延長部(63)の先端に前記フレーム(10)上の掛り部(32)に脱着可能に掛かるカラビナ(64)を取り付けて形成されている。
実施例のシート片(61)は、滑りの良い素材、或いは滑りを良好にする表面加工、例えばフッ素樹脂のコーティングが成された略三角形に形成され、各コーナに取付け部(62)を設けている。
実施例の取付け部(62)は、シート片(61)の各頂部を帯状に延長し、或いは別の帯布を接続して延長部(63)を形成し、該延長部(63)の先端に前記フレーム(10)上の掛り部(32)に脱着可能に掛かるカラビナ(64)を取り付けて形成されている。
以下に上記歩行器(1)の使用法を説明する。
上フレーム(3)から支え部材(6)を外す。
図2に示す如く、ベッド(8)の端部に、該ベッドから足を投げ出して坐っている使用者(9)の尻(91)とベッド(8)との間に、支え部材(6)のシート片(61)を滑り込ませる。このとき、支え部材(6)の1つの取付け部(62)を使用者の股の間を潜って前側に位置させ、他の2つの取付け部(62)(62)は尻(91)の左右に位置させる。
上フレーム(3)から支え部材(6)を外す。
図2に示す如く、ベッド(8)の端部に、該ベッドから足を投げ出して坐っている使用者(9)の尻(91)とベッド(8)との間に、支え部材(6)のシート片(61)を滑り込ませる。このとき、支え部材(6)の1つの取付け部(62)を使用者の股の間を潜って前側に位置させ、他の2つの取付け部(62)(62)は尻(91)の左右に位置させる。
シート片(61)は、滑りのよい素材で形成され、或いは滑りのよい表面加工がなされているから、使用者の尻(91)を持ち上げなくとも、下記の手順で楽に尻(91)に敷かせることができる。
使用者(9)の足(92)の付け根とベッド(8)との間にシート片(61)を潜りこませて、シート片(61)が尻(91)の下に位置する様に2つの取付け部(62)(62)を引っ張る。滑りのよいシート片(61)は、尻(91)とベッド(8)の間を滑って尻(91)の下に潜り込む。取付け部(62)のカラビナ(64)が滑り止めとなって、取付け部(62)を引っ張る際に力が入り易く、シート片(61)を引っ張る作業性は一層向上する。
使用者(9)がベッド(8)に寝て、足(92)だけをベッド(8)の外に投げ出した姿勢で、上記支え部材(6)りシート片(61)を尻(91)に敷かせれば、シート片(61)に掛かる体重は大幅に減るので、上記作業を一層楽に行うことができる。
使用者(9)の足(92)の付け根とベッド(8)との間にシート片(61)を潜りこませて、シート片(61)が尻(91)の下に位置する様に2つの取付け部(62)(62)を引っ張る。滑りのよいシート片(61)は、尻(91)とベッド(8)の間を滑って尻(91)の下に潜り込む。取付け部(62)のカラビナ(64)が滑り止めとなって、取付け部(62)を引っ張る際に力が入り易く、シート片(61)を引っ張る作業性は一層向上する。
使用者(9)がベッド(8)に寝て、足(92)だけをベッド(8)の外に投げ出した姿勢で、上記支え部材(6)りシート片(61)を尻(91)に敷かせれば、シート片(61)に掛かる体重は大幅に減るので、上記作業を一層楽に行うことができる。
次に、上フレーム(3)の閉じ杆(33)を開き、支え部材(6)を外した状態の歩行器(1)を、支え部材(6)を敷いてベッド(8)の端に坐っている使用者(寝た姿勢で支え部材(6)を尻(91)をのに敷いた使用者(9)対しては、起こして坐らせておく)に対して、開放部(21)(31)から接近させる。
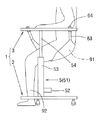
図3に示す如く、フレーム(10)内に、使用者の下半身が侵入する程度に歩行器(1)をベッド(8)に突っ込む。これは、実施例の様に、フレーム(10)の前後方向の略中央部から後方にはベッド(8)に衝突する邪魔部材が存在していない歩行器(1)だけが成せる技である。
図3に示す如く、フレーム(10)内に、使用者の下半身が侵入する程度に歩行器(1)をベッド(8)に突っ込む。これは、実施例の様に、フレーム(10)の前後方向の略中央部から後方にはベッド(8)に衝突する邪魔部材が存在していない歩行器(1)だけが成せる技である。
使用者(8)を上フレーム(3)に掴まらせて、支え部材(6)の3つのカラビナ(64)(64)(64)を、歩行器(1)の上フレーム(3)の3つの孔(35)(35)に引っ掛ける。この動作は、キャスター(4)のロックを利かせて歩行器(1)の移動を防止して行うことが望ましい。
使用者自身或いは介助者が、スイッチ(7)を操作してモータシリンダ(51)を作動し、上フレーム(3)を上昇させ、支え部材(6)上の使用者(9)の尻(91)をベッド(8)から浮上させる。
キャスター(4)のロックを解除し、使用者が自力で、或いは介助者の力を借りて歩行器(1)をベッド(8)から離す。
使用者の使い易い高さ位置に、上フレーム(3)の高さを調整する。又、上フレーム(3)の開放部(31)を閉じ杆(33)で閉じる。
モータシリンダ(51)は、ピストンロッド(54)の有効ストロークの範囲で任意に高さ位置を変えることができるから、使用者(9)が、歩行器(1)に乗ったまま最も自力歩行し易い高さ位置に、或いは、リハビリの目的とする必要な足(91)の筋肉を鍛えるのに最も効果的な高さ位置に、上フレーム(3)の高さ位置、即ち、使用者の尻(91)の位置を調整できる。
キャスター(4)のロックを解除し、使用者が自力で、或いは介助者の力を借りて歩行器(1)をベッド(8)から離す。
使用者の使い易い高さ位置に、上フレーム(3)の高さを調整する。又、上フレーム(3)の開放部(31)を閉じ杆(33)で閉じる。
モータシリンダ(51)は、ピストンロッド(54)の有効ストロークの範囲で任意に高さ位置を変えることができるから、使用者(9)が、歩行器(1)に乗ったまま最も自力歩行し易い高さ位置に、或いは、リハビリの目的とする必要な足(91)の筋肉を鍛えるのに最も効果的な高さ位置に、上フレーム(3)の高さ位置、即ち、使用者の尻(91)の位置を調整できる。
上フレーム(3)の開放部(31)は閉じ杆(33)で閉じられているから、使用者が後方に転倒することは防止される。
又、実施例の様に、カラビナ(64)を上フレーム(3)上の孔(35)に引っ掛けて支え部材(6)を上フレーム(3)に取り付ける構成であれば、周知の如く、カラビナ(64)の開放可能部はバネ付勢されて不用意には開かないため、歩行器(1)の使用中に支え部材(6)が外れる危険はない。
カラビナ(32)は、その開放可能部を手指で押し込むと、簡単に開いて上フレーム(3)の孔(35)から外すことができるので、支え部材(6)の取り外しは容易にできる。
又、実施例の様に、カラビナ(64)を上フレーム(3)上の孔(35)に引っ掛けて支え部材(6)を上フレーム(3)に取り付ける構成であれば、周知の如く、カラビナ(64)の開放可能部はバネ付勢されて不用意には開かないため、歩行器(1)の使用中に支え部材(6)が外れる危険はない。
カラビナ(32)は、その開放可能部を手指で押し込むと、簡単に開いて上フレーム(3)の孔(35)から外すことができるので、支え部材(6)の取り外しは容易にできる。
使用者(9)を歩行器(1)からベッド(8)に移すには、ベッド(8)から歩行器(1)に移す動作の逆の動作でよい。
上記の如く、本発明の歩行器(1)の使用に際し、介助者が使用者を抱え上げて、歩行器内に導く動作は一切必要がなく、介助者にとっても、使用者にとって、その労力や肉体負担は大きく軽減され、その分、使用者はリハビリに専念でき、介助者は、他の介助に気配りができる。
上記実施例の説明は、本発明を説明するためのものであって、特許請求の範囲に記載の発明を限定し、或いは範囲を減縮する様に解すべきではない。又、本発明の各部構成は上記実施例に限らず、特許請求の範囲に記載の技術的範囲内で種々の変形が可能であることは勿論である。
例えば、上フレーム(3)の閉じ杆(33)は、使用者が後方へ倒れることを防止する危険を回避するためであって、閉じ杆(33)が存在せず、上フレーム(3)の開放部(31)が開放されたままでも、使用目的には影響しない。
支え部材(6)のシート片(61)は略三角形に限定されることなく、使用者の尻(91)を載せることが十分に可能な大きさの布に、使用者の片方づつの足が嵌まる2つの穴を開設したもの等、使用者が尻に敷いて、外側に足を投げ出すことができれば形状は問わない。
又、支え部材(6)の取付け部(62)の個数も、シート片(61)の形状に応じて適当に決めることができ、歩行器(1)の上フレーム(3)の掛り部(32)の個数も取付け部(62)の個数に合わせればよい。
又、支え部材(6)の取付け部(62)の個数も、シート片(61)の形状に応じて適当に決めることができ、歩行器(1)の上フレーム(3)の掛り部(32)の個数も取付け部(62)の個数に合わせればよい。
支え部材(6)の取付け部(62)及び上フレーム(3)の掛り部(32)は、上記のものに限定されることはなく、シート片(61)を上フレーム(3)に着脱可能に取り付けできるものであれば、形状及び構成は問わない。
上フレーム(3)を昇降させるモータシリンダ(51)は、2基以上の複数とすれば、上フレーム(3)の取付け剛性が向上し、安定して昇降できるが、1基でも実施可能である。
又、昇降駆動装置(5)は、上記モータシリンダ(51)等の動力駆動式に限るものではなく、動力の不要なガスシリンダ(椅子の高さ調節に多用されていることで公知)、手動式ジャッキ等、上フレーム(3)を高さ調節可能に昇降させることが出来れば構成は問わない。
又、昇降駆動装置(5)は、上記モータシリンダ(51)等の動力駆動式に限るものではなく、動力の不要なガスシリンダ(椅子の高さ調節に多用されていることで公知)、手動式ジャッキ等、上フレーム(3)を高さ調節可能に昇降させることが出来れば構成は問わない。
実施例では、歩行器(1)の下フレーム(2)にも開放部(21)を設けたが、下フレーム(2)に開放部(21)を設けることは必須要件ではない。下フレーム(2)が環状体であっても、使用者(9)の足(92)を下フレーム(2)を交わす程度に少し持ち上げるだけで、歩行器(1)への乗り込みは可能である。下フレーム(2)を環状体とすれば、キャスター(4)の取付け数を増やして、走行に一層安定性をもたせることができる。
又、下フレーム(2)の前部に使用者の足を載せる足受け台(図示せず)を設けておくことができる。介助者が歩行器(1)を押して使用者を移動させる場合、下フレーム(2)の高さ位置を下げて、使用者はシート片(61)に坐り、足を足受け台に載せておくことにより、歩行器(1)の移動を速やかに行うことができる。
フレーム(10)に手押し用のハンドルを設けることもできる。この場合、歩行器(1)への乗り下りの邪魔にならぬ位置にハンドルを設けること、或いはハンドルを着脱可能とすることが必要である。
フレーム(10)に手押し用のハンドルを設けることもできる。この場合、歩行器(1)への乗り下りの邪魔にならぬ位置にハンドルを設けること、或いはハンドルを着脱可能とすることが必要である。
1 歩行器
10 フレーム
2 下フレーム
3 上フレーム
4 キャスター
5 昇降駆動装置
6 支え部材
61 シート片
62 取付け部
8 ベッド
10 フレーム
2 下フレーム
3 上フレーム
4 キャスター
5 昇降駆動装置
6 支え部材
61 シート片
62 取付け部
8 ベッド
Claims (4)
- 使用者(9)の周囲を取り囲むことができ下端部にキャスター(4)を具えたフレーム(10)と、該フレーム(10)に取り付けられ尻(91)を載せて使用者(9)を吊り支える支え部材(6)を具えた歩行器において、
フレーム(10)は、キャスター(4)を具えた下フレーム(2)と、該下フレーム(2)に対して昇降可能に配備され後部側から使用者(9)がフレーム(10)に入り込み可能な開放部(31)を有する上フレーム(3)を含み、上フレーム(3)は昇降駆動装置(5)に連繋されており、支え部材(6)は、使用者(9)の尻(91)を載せることができると共に使用者(9)の足(92)を床へ投げ出すことを許す形状の柔軟性を有するシート片(61)と該シート片(61)の複数箇所に設けられ前記上フレーム(3)に着脱可能に取付けできる取付け部(62)とによって構成されている歩行器。 - シート片(61)は滑りのよい素材で形成され、或いは滑り易い表面加工が施されている請求項1に記載の歩行器。
- 下フレーム(2)と上フレーム(3)との間には、下フレーム(2)と上フレーム(3)によって使用者のベッド(8)の端部を挟む様にしてフレーム(10)をベッド(8)に突っ込むことが可能に様に、フレーム(10)の前後方向の略中央部から後方にはベッド(8)に衝突する邪魔部材が存在していない請求項1又は2に記載の歩行器。
- 昇降駆動装置(5)は、モータシリンダ(51)等の動力駆動式である請求項1に記載の歩行器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006026512A JP2007202880A (ja) | 2006-02-03 | 2006-02-03 | 歩行器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006026512A JP2007202880A (ja) | 2006-02-03 | 2006-02-03 | 歩行器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007202880A true JP2007202880A (ja) | 2007-08-16 |
Family
ID=38482877
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006026512A Pending JP2007202880A (ja) | 2006-02-03 | 2006-02-03 | 歩行器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007202880A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3181403U (ja) * | 2012-11-01 | 2013-02-07 | 株式会社松新ステンレス製作所 | 在宅介護用歩行訓練具 |
| KR101399125B1 (ko) * | 2013-06-11 | 2014-05-28 | 정민영 | 보행보조기 |
| JP2017000309A (ja) * | 2015-06-08 | 2017-01-05 | 株式会社ミツバ | 移動支援装置 |
| JP2017070352A (ja) * | 2015-10-05 | 2017-04-13 | 株式会社ミツバ | 移動支援装置 |
| CN108670740A (zh) * | 2018-06-05 | 2018-10-19 | 芜湖谱瑞电子科技有限公司 | 一种医疗用肢体行走功能恢复装置 |
| KR20200120191A (ko) * | 2019-04-11 | 2020-10-21 | 한지훈 | 보행기를 이용한 어린이 보행훈련 제어 시스템 |
| CN114053106A (zh) * | 2021-12-09 | 2022-02-18 | 袁靖 | 一种肢臂充气康复机器人 |
| KR20220150022A (ko) * | 2021-05-03 | 2022-11-10 | 박인화 | 성인용 보행보조기 |
-
2006
- 2006-02-03 JP JP2006026512A patent/JP2007202880A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3181403U (ja) * | 2012-11-01 | 2013-02-07 | 株式会社松新ステンレス製作所 | 在宅介護用歩行訓練具 |
| KR101399125B1 (ko) * | 2013-06-11 | 2014-05-28 | 정민영 | 보행보조기 |
| JP2017000309A (ja) * | 2015-06-08 | 2017-01-05 | 株式会社ミツバ | 移動支援装置 |
| JP2017070352A (ja) * | 2015-10-05 | 2017-04-13 | 株式会社ミツバ | 移動支援装置 |
| CN108670740A (zh) * | 2018-06-05 | 2018-10-19 | 芜湖谱瑞电子科技有限公司 | 一种医疗用肢体行走功能恢复装置 |
| KR20200120191A (ko) * | 2019-04-11 | 2020-10-21 | 한지훈 | 보행기를 이용한 어린이 보행훈련 제어 시스템 |
| KR102176050B1 (ko) * | 2019-04-11 | 2020-11-06 | 한지훈 | 보행기를 이용한 어린이 보행훈련 제어 시스템 |
| KR20220150022A (ko) * | 2021-05-03 | 2022-11-10 | 박인화 | 성인용 보행보조기 |
| KR102542882B1 (ko) * | 2021-05-03 | 2023-06-12 | 박인화 | 성인용 보행보조기 |
| CN114053106A (zh) * | 2021-12-09 | 2022-02-18 | 袁靖 | 一种肢臂充气康复机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5563570B2 (ja) | 移乗・移動装置 | |
| JP2007202880A (ja) | 歩行器 | |
| US9254233B2 (en) | Apparatus for lifting persons | |
| CA2801884C (en) | Rising support integrated in a walking aid | |
| JP2007181639A (ja) | 起立補助椅子 | |
| JP6578081B2 (ja) | 起立着座移動支援装置 | |
| WO2001021128A1 (en) | A mobility aid | |
| JP2007090020A (ja) | 自力乗り移り車椅子 | |
| JP2001321404A (ja) | 歩行器兼用車椅子 | |
| JP2010279396A (ja) | 介護用移乗用具 | |
| KR101462378B1 (ko) | 리프트가 구비된 휠체어 | |
| US20230181410A1 (en) | Lift transfer apparatus | |
| JP4498980B2 (ja) | ポータブル・トイレ | |
| CN114652548A (zh) | 一种微变人体姿势的移乘装置 | |
| US9010779B1 (en) | Apparatus for lifting, stabilizing, and mobilizing an elderly or disabled person | |
| TWM618815U (zh) | 電動升降移位輔助裝置 | |
| KR200386669Y1 (ko) | 휠체어 사용자 부양장치 | |
| KR200450271Y1 (ko) | 스탠딩 리프트 | |
| JP2015131092A (ja) | 移乗移動装置 | |
| CN214549869U (zh) | 设有人体提升装置的座椅 | |
| JP3247100U (ja) | 介護用移動式リフト | |
| JP3063964B2 (ja) | 歩行訓練器具 | |
| JP2009268786A (ja) | 介護用起立支援移動台車 | |
| WO2024192649A1 (zh) | 起身照护机及其中的健康照护模块 | |
| JPH06319777A (ja) | 身障者入浴装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080610 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081014 |