JP2007088040A - 露光装置 - Google Patents
露光装置 Download PDFInfo
- Publication number
- JP2007088040A JP2007088040A JP2005272224A JP2005272224A JP2007088040A JP 2007088040 A JP2007088040 A JP 2007088040A JP 2005272224 A JP2005272224 A JP 2005272224A JP 2005272224 A JP2005272224 A JP 2005272224A JP 2007088040 A JP2007088040 A JP 2007088040A
- Authority
- JP
- Japan
- Prior art keywords
- immersion
- stage
- flow rate
- disturbance
- recovery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Landscapes
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
Abstract
【課題】 液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置を提供する。
【解決手段】 液浸媒体を露光領域に供給する液浸供給手段72と露光領域の液浸媒体を回収する液浸回収手段82とウエハーを搭載するステージ30と該ステージを制御するステージ制御手段10とを有し、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を算出する外乱演算手段20と該外乱演算手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御される露光装置とする。
【選択図】 図1
【解決手段】 液浸媒体を露光領域に供給する液浸供給手段72と露光領域の液浸媒体を回収する液浸回収手段82とウエハーを搭載するステージ30と該ステージを制御するステージ制御手段10とを有し、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を算出する外乱演算手段20と該外乱演算手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御される露光装置とする。
【選択図】 図1
Description
本発明は、露光装置におけるステージ制御装置に関し、特に液浸露光を行う際に発生する外乱を抑制してより精度の高いステージ制御を可能とするステージ制御装置に関するものである。
近年のICやLSI等の半導体集積回路は益々微細化が進み、それに伴い半導体露光装置のパターン転写能力も更なる高解像度が要求されている。露光装置における解像度:Resは下式で表される。
Res = k1・λ/NA (1)
k1はプロセスファクタ、λは露光光源波長、NAは開口数である。
k1はプロセスファクタ、λは露光光源波長、NAは開口数である。
より微細な解像度を得るには、波長を短くするか、もしくはNAを大きくする必要がある。露光光源としては、λ=248nmのKrFエキシマレーザ、λ=193nmのArFエキシマレーザ等があり、NAを大きくする一つの方法としては、液浸露光がある。この液浸露光では、パターンをウエハーに転写する投影光学系の最下面とウエハーとの間に屈折率nの媒体を介在させて露光を行う。投影光学系の最下面からウエハーへの転写光の入射角度をθとすると、NAは下式で表される。
NA=n・sinθ (2)
例えば、液浸媒体に水を使用すると、水の屈折率n=1.44より、解像度を1/1.44倍向上させることができ、より波長の短い新たな露光光源を用いることなく解像度の向上が可能となる。
例えば、液浸媒体に水を使用すると、水の屈折率n=1.44より、解像度を1/1.44倍向上させることができ、より波長の短い新たな露光光源を用いることなく解像度の向上が可能となる。
一般に、液浸媒体は液浸供給ノズルにより投影光学系の最下面とウエハーの間の僅かなギャップ間に供給され、露光エリアを通過した後、液浸回収ノズルにより回収される。走査型露光装置では回路パターンの原版を保持するレチクルステージとウエハーを保持するウエハーステージは同期して走査され、露光はレチクルステージとウエハーステージが反対方向に等速運動している際に行われる。一般的には、レチクルとウエハーの投影倍率は4:1で、レチクルステージとウエハーステージの走査速度比も4:1である。各走査速度は、生産性向上のためより高速な駆動が要求され、ウエハーステージの走査速度は数百mm/sに達している。その一方で、解像度向上によりステージはより精密な制御が要求され、位置誤差をnmオーダ以下に抑制する必要がある。
又、別の従来例としては、特許文献1をあげることが出来る。
特開2005-123305号公報
しかしながら液浸供給ノズルからの液浸供給の際にウエハーは部分的に加圧外乱が印加され、液浸回収ノズルによる液浸回収の際にウエハーは部分的に減圧外乱が印加され、これらの外乱によりウエハーステージの位置誤差が発生し、ひいては解像度が損なわれると言う問題が発生する。また、これらの外乱によりウエハーが僅かに変形し、結果として解像度が損なわれる可能性がある。
これらの点に鑑み、本発明は、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置を提供することを目的とする。また、液浸供給および液浸回収時にウエハーステージに印加される外乱により発生するウエハーの変形を抑制し、高解像度な露光装置を提供することを目的とする。
上記課題を解決するために、本発明に係る露光装置は、液浸媒体を露光領域に供給する液浸供給手段と露光領域の液浸媒体を回収する液浸回収手段とウエハーを搭載するステージと該ステージを制御するステージ制御手段とを有し、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を算出する外乱演算手段と該外乱演算手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御されることを特徴とする。
前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力および前記ステージに対する液浸印加角度より前記ステージに対する垂直方向の印加力を求める第1の演算部と前記液浸回収手段における流量または流速または吸引圧力および前記ステージに対する液浸吸引角度より前記ステージに対する垂直方向の吸引力を求める第2の演算部と前記第1の演算部と前記第2の演算部と前記ステージ制御手段からのステージ制御信号より前記ステージに対するモーメント力を算出する第3の演算部より構成され、該第3の演算部からの信号に基づき前記ステージ制御手段をフィードフォワード制御するよう構成されてもよい。
また、前記外乱演算手段の第1の演算部は、前記液浸供給手段における供給流量または供給流速と前記液浸供給手段の開口部寸法より供給流速または供給流量を算出し前記供給流量と前記供給流速と前記液浸媒体の密度により印加力を算出し、前記外乱演算手段の第2の演算部は前記液浸回収手段における回収流量または回収流速と前記液浸回収手段の開口部寸法より回収流速または回収流量を算出し前記回収流量と前記回収流速と前記液浸媒体の密度により吸引力を算出するよう構成されてもよい。
また、前記外乱演算手段の第3の演算部は前記ステージの平面をX軸、Y軸、高さ方向をZ軸とした場合、前記ステージの重心位置を原点として前記ステージ制御信号と前記液浸供給手段より供給される液浸媒体の重心位置座標と前記第1の演算部からの前記印加力と前記液浸回収手段より回収される液浸媒体の重心位置座標と前記第2の演算部からの前記吸引力とにより前記ステージに対するX軸周りのモーメント力およびY軸周りのモーメント力を算出するよう構成されてもよい。
この場合、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
また、前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を予め算出して値を保持する外乱記憶手段とを有し該外乱記憶手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージを制御してもよい。
この場合にも液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
また、前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力による前記ステージの位置誤差または前記ウエハーの変形を予め算出または測定して保持する外乱記憶手段を有し、該外乱記憶手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージを制御してもよい。
この場合にも液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
また、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱により発生するウエハーの変形を抑制し、高解像度な露光装置とすることが可能となる。
本発明によれば、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
また、本発明によれば、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱により発生するウエハーの変形を抑制し、高解像度な露光装置とすることが可能となる。
以下に本発明の各実施形態について、詳細に説明する。
(第一の実施形態)
図1は本発明による液浸露光装置の構成を示す図である。
図1は本発明による液浸露光装置の構成を示す図である。
不図示の露光光源より出射された露光光は、照明光学系100により、レチクルステージ120に設置されたレチクル122を照射する。レチクル122を透過した光は、投影光学系140を透過して、ウエハーステージ30に設置されたウエハー32に到達し、レチクル上に描かれた微細なパターンをウエハー上の各チップに焼き付ける。露光光源にはKrFレーザ光源や、更なる微細化のため波長の短いArFレーザー光源が用いられることが多い。
スキャニングステッパーもしくは走査型露光装置と称される露光装置では、レチクルステージ120とウエハーステージ30は同期して逆方向に走査し、同期走査中に露光が行われ、露光終了すると次のチップの露光のためにウエハーステージ30がステップ駆動される。走査型露光装置では、より生産性を向上させるため、レチクルステージ120およびウエハーステージ30の各ステージは、より速い加速度により加速され、より速い速度で同期走査露光される。一般に、縮小露光が行われ、レチクル122対ウエハー32の露光縮小率は4:1で、レチクルステージ120とウエハーステージ30の加速度および速度の比率は、同様に4:1である。各ステージの加速度および速度は益々増加し、ウエハーステージ140の加速度は1G〜1.5G、速度は300mm/s〜600mm/s程度まで引き上げられている。
各ステージは生産性向上のために極めて高速に駆動され、かつ微細化露光のため極めて精密に位置または速度が制御されなければならない。
一般にレチクルステージ120およびウエハーステージ30は、エアーまたは磁力等により浮上された上でローレンツ力の原理を用いたリニアモータや、場合によっては平面モータ等のアクチュエータにより同期走査またはステップ駆動が行われる。微細化露光のため各ステージの位置はnmオーダで精密に制御する必要があり、一般的には不図示のレーザ干渉計により各ステージの位置が常に正確に監視され、フィードバック制御が成されている。
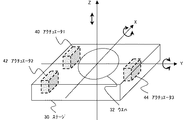
図2にウエハーステージ30の構成例を示す。同期走査方向をY軸、ステップ駆動方向をX軸、高さ方向をZ軸とすると、前記同期走査またはステップ駆動のためのアクチュエータの他に40、42、44から成るアクチュエータ1、2、3が構成されている。これら40、42、44のアクチュエータを駆動することにより、ウエハーステージ30およびウエハー32のZ軸方向の駆動、即ち、露光時のフォーカス調整と、X軸周りの回転ωx、およびY軸周りの回転ωyを制御することが可能となる。これら40、42、44のアクチュエータは、リニアモータにより構成されることが多い。
図5にステージ制御系の構成図を示す。ステージ制御部10は前記レーザ干渉計等の位置計測18からの信号を加減算器11にフィードバックし、ステージ位置が目標値と等しくなるよう制御部12によりPID演算等の制御演算を行い、駆動部16により上記リニアモータ等のアクチュエータを駆動してウエハーステージ30を制御する。一般にリニアモータは入力された電気信号に対し比例的な推力を発生する。リニアモータの推力定数は[N/A]で示され、推力は印加される電流値に比例する。尚、このステージ制御の構成は、X軸、Y軸、Z軸、ωx回転、ωy回転等に対して共通のものである。
図1に戻り説明を続ける。
液浸露光装置では、液浸供給制御部70により液浸媒体の温度および流量または流速または圧力が所定値に制御され、液浸供給ノズル72よりウエハーステージ30上のウエハー32に供給され、液浸回収制御部80により制御される液浸回収ノズル82によってウエハー32上の液浸媒体を回収する。露光はウエハー32上に液浸媒体が供給されている状態で行われ、例えば、液浸媒体に水を使用すると、水の屈折率n=1.44より、(1)式、(2)式より解像度を1/1.44倍向上させることが可能となる。
図3に液浸供給ノズル72によるウエハーステージ30に及ぼす外乱力の一例を示す。液浸供給ノズル72はウエハーステージ30に対し入射角φaを有してウエハー32と投影光学系140の最下面の間のギャップに液浸媒体を供給する。
一般的には、ウエハーステージの走査速度とウエハー32に供給される液浸媒体の水平方向の速度がほぼ等しくなるように液浸供給制御部70により液浸媒体の流量または流速または圧力が制御される。
一般的には、ウエハーステージの走査速度とウエハー32に供給される液浸媒体の水平方向の速度がほぼ等しくなるように液浸供給制御部70により液浸媒体の流量または流速または圧力が制御される。
液浸供給ノズル72からウエハー32に供給された液浸媒体の流速をVa(m/s)、水平方向の流速をVay(m/s)、液浸供給ノズル72からウエハー32への液浸媒体供給角度をφaとすると、
Va = Vay/sinφa (3)
で表される。
Va = Vay/sinφa (3)
で表される。
液浸供給ノズル72の開口部の形状をX軸方向の長さをLax(m)、Y軸方向長さをLay(m)、とすると、液浸供給ノズル72から供給される液浸媒体の流量Qa(m3/s)は、
Qa = Va・Lax・Lay = Vay・Lax・Lay/sinφa (4)
で表される。
Qa = Va・Lax・Lay = Vay・Lax・Lay/sinφa (4)
で表される。
液浸媒体の密度をρ(kg/m3)とすると、液浸供給ノズル72からウエハー32に印加された力Fa(N)は、
Fa = ρ・Qa・Va = ρ・Lax・Lay・(Vay/sinφa)2 (5)
で表される。
Fa = ρ・Qa・Va = ρ・Lax・Lay・(Vay/sinφa)2 (5)
で表される。
これより液浸供給ノズル72からウエハー32に印加されたZ方向の力Faz(N)は、
Faz = Fa・cosφa
= ρ・Lax・Lay・(Vay/sinφa)2・cosφa (6)
で表される。
Faz = Fa・cosφa
= ρ・Lax・Lay・(Vay/sinφa)2・cosφa (6)
で表される。
例えば、Vay=0.5m/s、φa=45°、Lax=0.1m、Lay=0.003m、液浸媒体を水としてρ=103kg/m3と仮定すると、
Faz =−0.106N (7)
となる。
Faz =−0.106N (7)
となる。
液浸供給ノズル72から供給される液浸媒体は、液浸供給制御部70から液浸供給ノズル72の間に流量計を設置して、供給流量Qaを測定し、所定の液浸供給流速になるように液浸供給制御部70を制御するよう構成してもよいし、前記流量計と液浸供給制御部70における液浸供給圧力との関係を予め測定しておき、所定の流量に対して液浸供給制御部70の液浸供給圧力を設定するよう構成してもよい。
図5における外乱演算部20の第1演算部22では、液浸供給制御部70にて設定される液浸媒体の流量または流速または加圧力をもとにして既知の液浸供給ノズル形状Lax、Layおよびウエハー32に対する液浸媒体印加角度φaより(6)式にてウエハー32に対する垂直方向の印加力Fazを算出する。
図3に戻り説明を続ける。ウエハー32と投影光学系140の最下面の間のギャップには液浸媒体により液浸部75が存在する。
ウエハー32から液浸回収ノズル82により回収される液浸媒体の流速をVb(m/s)、水平方向の流速をVby(m/s)、ウエハー32から液浸回収ノズル82への液浸媒体回収角度をφbとすると、
Vb = Vby/sinφb (8)
で表される。
Vb = Vby/sinφb (8)
で表される。
液浸回収ノズル82の開口部の形状をX軸方向の長さをLbx(m)、Y軸方向長さをLby(m)、とすると、液浸回収ノズル82から回収される液浸媒体の流量Qb(m3/s)は、
Qb = Vb・Lbx・Lby = Vby・Lbx・Lby/sinφb (9)
で表される。
Qb = Vb・Lbx・Lby = Vby・Lbx・Lby/sinφb (9)
で表される。
液浸媒体の密度をρ(kg/m3)とすると、液浸回収ノズル82によりウエハー32に印加された力Fb(N)は、
Fb = ρ・Qb・Vb = ρ・Lbx・Lby・(Vby/sinφb)2(10)
で表される。
Fb = ρ・Qb・Vb = ρ・Lbx・Lby・(Vby/sinφb)2(10)
で表される。
これより液浸回収ノズル82からウエハー32に印加されたZ方向の力Fbz(N)は、
Fbz = Fb・cosφb
= ρ・Lbx・Lby・(Vby/sinφb)2・cosφb (11)
で表される。
Fbz = Fb・cosφb
= ρ・Lbx・Lby・(Vby/sinφb)2・cosφb (11)
で表される。
例えば、Vby=0.5m/s、φb=45°、Lbx=0.1m、Lby=0.003m、液浸媒体を水としてρ=103kg/m3と仮定すると、
Fbz = 0.106N (12)
となる。
Fbz = 0.106N (12)
となる。
液浸回収ノズル82から回収される液浸媒体は、液浸回収制御部80から液浸回収ノズル82の間に流量計を設置して、供給流量Qbを測定し、所定の液浸回収流速になるように液浸回収制御部80を制御するよう構成してもよいし、前記流量計と液浸回収制御部80における液浸回収圧力との関係を予め測定しておき、所定の流量に対して液浸回収制御部80の液浸回収圧力を設定するよう構成してもよい。
図5における外乱演算部20の第2演算部24では、液浸回収制御部80にて設定される液浸媒体の流量または流速または吸引圧力をもとにして既知の液浸供給ノズル形状Lbx、Lbyおよびウエハー32に対する液浸媒体回収角度φbより(11)式にてウエハー32に対する垂直方向の吸引力Fbzを算出する。
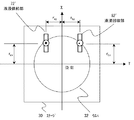
次に、外乱演算部20の第3演算部26における演算を図4を用いて説明する。
図4はウエハーステージ30およびウエハー32を上から見た図である。
ウエハーステージ30の重心位置を原点(0,0)としてステージ平面をX軸、Y軸、高さ方向をZ軸と定義する。
液浸供給ノズル72によりウエハー32上に液浸媒体が噴射される部分を液浸供給部72’とし、液浸回収ノズル82によりウエハー32から液浸媒体が回収される部分を液浸回収部82’とする。液浸供給部72’および液浸回収部82’は、それぞれ液浸供給ノズル72、液浸回収ノズル82の各開口部寸法か、または各開口部寸法のウエハー32への投影面積を表す。液浸供給部72’における×印は、液浸供給ノズル72よりウエハー32上に噴射された液浸媒体の重心位置座標(rax、ray)におけるZ方向の力Fazを示し、液浸回収部82’における・印は、液浸回収ノズル82よりウエハー32上から回収される液浸媒体の重心位置座標(rbx、rby)におけるZ方向の力Fbzを示す。これらの重心位置は前記各ノズルの開口部寸法の重心位置またはウエハー32に投影された際の投影部面積における重心位置に等しい。
図4に示した液浸供給部72’の重心位置座標(rax、ray)における印加力Fazと、液浸回収部82’の重心位置座標(rbx、rby)における吸引力Fbzによりウエハーステージ30およびウエハー32にはX軸周りのモーメント力Qx(N・m)とY軸周りのモーメント力Qy(N・m)が発生する。
図5における外乱演算部20の第3演算部26では、Qx、Qyを以下のような演算により算出する。
Qx = ray・Faz+rby・Fbz (13)
Qy = rax・Faz+rby・Fbz (14)
ウエハーステージ30またはウエハー32上の液浸供給部72’の重心位置座標(rax、ray)および液浸回収部82’の重心位置座標(rbx、rby)は、走査露光により変化する。即ち、液浸供給ノズル72と液浸回収ノズル82の位置は固定されているが、ウハーステージ30の走査露光によりウエハーステージ30およびウエハー32の位置が変化し、それにより固定されている投影光学系140や液浸供給ノズル72および液浸回収ノズル82に対し、ウエハーステージ30における液浸供給部72’の重心位置座標(rax、ray)と液浸回収部82’の重心位置座標(rbx、rby)が変化する。液浸供給ノズル72および液浸回収ノズル82の位置は固定であるため露光装置設計上において既知であり、ウエハーステージ30の位置はステージ制御部10により制御されているため、位置計測18等によりステージ位置を知ることができ、結果としてステージ位置の情報より液浸供給部72’の重心位置座標(rax、ray)と液浸回収部82’の重心位置座標(rbx、rby)を算出することができる。
Qy = rax・Faz+rby・Fbz (14)
ウエハーステージ30またはウエハー32上の液浸供給部72’の重心位置座標(rax、ray)および液浸回収部82’の重心位置座標(rbx、rby)は、走査露光により変化する。即ち、液浸供給ノズル72と液浸回収ノズル82の位置は固定されているが、ウハーステージ30の走査露光によりウエハーステージ30およびウエハー32の位置が変化し、それにより固定されている投影光学系140や液浸供給ノズル72および液浸回収ノズル82に対し、ウエハーステージ30における液浸供給部72’の重心位置座標(rax、ray)と液浸回収部82’の重心位置座標(rbx、rby)が変化する。液浸供給ノズル72および液浸回収ノズル82の位置は固定であるため露光装置設計上において既知であり、ウエハーステージ30の位置はステージ制御部10により制御されているため、位置計測18等によりステージ位置を知ることができ、結果としてステージ位置の情報より液浸供給部72’の重心位置座標(rax、ray)と液浸回収部82’の重心位置座標(rbx、rby)を算出することができる。
第3演算部26で算出されたQx、Qy、の反対の極性を有する信号が加算器14に入力され、駆動部16を通してこれらの外乱力が打ち消されるようにウエハーステージのωx回転用リニアモータ、およびωy回転用リニアモータがフィードフォワード駆動されてウエハーステージ30が制御される。
これら外乱演算部20における外乱力算出演算は、位置計測18からの信号に基づき、リアルタイムに演算するよう構成してもよいし、露光を行うチップの中心座標に基づき、各チップの露光毎に演算するよう構成してもよい。
これらの動作により液浸供給および回収により発生する外乱力に対してウエハーステージ30をフィードフォワード制御することが可能となり、液浸露光装置の液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
(第二の実施形態)
次に図6に基づき本発明による第二の実施形態について説明する。尚、第一の実施形態と同一の動作となる部分は同一番号を付し、動作に関する説明を割愛する。第二の実施形態による外乱演算部20aにおける第3演算部26aは、ウエハーステージ30の各位置における外乱力を、予め算出して記憶保持するよう構成される。例えば、液浸供給制御部70による流量または流速または加圧力と液浸回収制御部80による流量または流速または吸引圧力に対してウエハーステージ30の各位置における外乱力を算出して記憶保持し、これらの外乱力の算出結果を液浸供給および回収の設定流量または流速または圧力毎に記憶保持するよう構成される。外乱演算部20aは、液浸供給制御部70および液浸回収制御部80からの流量または流速または圧力の情報とステージ制御部10からのステージ位置信号に基づき、第3演算部26aに記憶保持されている外乱力を打ち消す信号が加算器14に入力され、駆動部16を通してウエハーステージのωx回転用リニアモータ、およびωy回転用リニアモータがフィードフォワード駆動されてウエハーステージ30が制御される。
次に図6に基づき本発明による第二の実施形態について説明する。尚、第一の実施形態と同一の動作となる部分は同一番号を付し、動作に関する説明を割愛する。第二の実施形態による外乱演算部20aにおける第3演算部26aは、ウエハーステージ30の各位置における外乱力を、予め算出して記憶保持するよう構成される。例えば、液浸供給制御部70による流量または流速または加圧力と液浸回収制御部80による流量または流速または吸引圧力に対してウエハーステージ30の各位置における外乱力を算出して記憶保持し、これらの外乱力の算出結果を液浸供給および回収の設定流量または流速または圧力毎に記憶保持するよう構成される。外乱演算部20aは、液浸供給制御部70および液浸回収制御部80からの流量または流速または圧力の情報とステージ制御部10からのステージ位置信号に基づき、第3演算部26aに記憶保持されている外乱力を打ち消す信号が加算器14に入力され、駆動部16を通してウエハーステージのωx回転用リニアモータ、およびωy回転用リニアモータがフィードフォワード駆動されてウエハーステージ30が制御される。
これらの動作により液浸供給および回収により発生する外乱力に対してウエハーステージ30をフィードフォワード制御することが可能となり、液浸露光装置の液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
(第三の実施形態)
次に図7に基づき本発明による第三の実施形態について説明する。尚、第一の実施形態と同一の動作となる部分は同一番号を付し、動作に関する説明を割愛する。第三の実施形態による外乱演算部20bは、液浸供給制御部70における流量または流速または加圧力と液浸回収制御部80における流量または流速または吸引圧力とステージ制御手段10aからのステージ位置信号よりウエハーステージ30に印加される外乱力による各ステージ位置制御系における位置誤差を予め算出または測定して外乱テーブル28に記憶保持し、ウエハーステージ30が駆動される際にそれらの位置誤差が打ち消されるよう、外乱テーブル28より加減算器11に目標位置信号として加算し、制御部12によるPID演算の後、駆動部16を通してウエハーステージのωx回転用リニアモータ、およびωy回転用リニアモータを駆動してウエハーステージ30が制御されるよう構成される。
次に図7に基づき本発明による第三の実施形態について説明する。尚、第一の実施形態と同一の動作となる部分は同一番号を付し、動作に関する説明を割愛する。第三の実施形態による外乱演算部20bは、液浸供給制御部70における流量または流速または加圧力と液浸回収制御部80における流量または流速または吸引圧力とステージ制御手段10aからのステージ位置信号よりウエハーステージ30に印加される外乱力による各ステージ位置制御系における位置誤差を予め算出または測定して外乱テーブル28に記憶保持し、ウエハーステージ30が駆動される際にそれらの位置誤差が打ち消されるよう、外乱テーブル28より加減算器11に目標位置信号として加算し、制御部12によるPID演算の後、駆動部16を通してウエハーステージのωx回転用リニアモータ、およびωy回転用リニアモータを駆動してウエハーステージ30が制御されるよう構成される。
位置誤算はステージ制御部10aにおける加減算器11からの出力信号13であり、この位置誤差信号13を測定して外乱テーブル28に記憶保持する。加減算器に印加される目標位置信号は、位置誤差とは極性が異なり、また、ステージ制御部10aの制御帯域を考慮して加減算器11に加算する前に微分的なフィルタリングを施してもよい。また、一度測定された位置誤差に基づき外乱テーブル28により加減算器11に目標位置信号を加算して、再度、位置誤差を測定し、更に位置誤差を低減するために測定された位置誤差をもとに、外乱テーブル28に記憶保持する位置誤差の値を更新するよう構成してもよい。
また、これらは、ωx、ωyの位置誤差のみならず、X位置誤差、Y位置誤差、Z位置誤差についても同様の手法により位置誤差を測定して外乱テーブル28に記憶保持し、各位置誤差が低減されるようXステージ制御部、Yステージ制御部、Zステージ制御部に目標位置信号として加算し、各軸の位置誤差を低減するよう構成してもよい。
また、第二の実施形態で計算した外乱力よりステージ制御部10aの制御帯域を考慮して位置誤差を算出して外乱テーブル28に記憶保持させてもよい。駆動部16やステージ30の伝達関数特性は設計上、既知でありPID演算を行う制御部も設計上、既知である。干渉計を用いた位置計測18の応答は極めて高速であるため通常、遅れ要素として考慮する必要がない。上記より、ウエハーステージにおける各構成部品は全て既知であるため計算により算出した外乱力による位置誤差も計算することが可能となり、上記の実際に測定を行った場合と同じように位置誤差を外乱テーブル28に記憶保持させ、ウエハーステージ30が駆動される際にそれらの位置誤差が打ち消すようステージ制御部10aを構成することができる。
同様にして、液浸供給または液浸回収によるウエハー32の変形を実測または計算により求め、ウエハー32の変形を抑制するようステージ制御部10aの目標位置信号を外乱テーブル28に記憶保持させ、外乱テーブル28より加減算器11に目標位置信号として加算し、制御部12によるPID演算の後、駆動部16を通してウエハーステージのXステージ制御、Yステージ制御、Zステージ制御、ωxステージ制御、ωyステージ制御を行うよう構成してもよい。
これら外乱テーブル28に記憶保持される目標位置信号は、液浸供給および回収の設定流量または流速または圧力毎に記憶保持するよう構成され、液浸供給制御部70および液浸回収制御部80からの信号によりステージ制御部10aへ入力する外乱テーブル28に記憶保持されている目標位置信号を変更するよう構成される。
これらの動作により、液浸供給および液浸回収時にウエハーステージに印加される外乱の影響を抑制し、より精密なウエハーステージ制御を可能として高解像度な露光装置とすることが可能となる。
また、液浸露光装置において液浸供給および液浸回収時にウエハーステージに印加される外乱により発生するウエハーの変形を抑制し、高解像度な露光装置とすることが可能となる。
Claims (6)
- 液浸媒体を露光領域に供給する液浸供給手段と露光領域の液浸媒体を回収する液浸回収手段とウエハーを搭載するステージと該ステージを制御するステージ制御手段とを有し、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を算出する外乱演算手段と該外乱演算手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御されることを特徴とする露光装置。
- 前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力および前記ステージに対する液浸印加角度より前記ステージに対する垂直方向の印加力を求める第1の演算部と前記液浸回収手段における流量または流速または吸引圧力および前記ステージに対する液浸吸引角度より前記ステージに対する垂直方向の吸引力を求める第2の演算部と前記第1の演算部と前記第2の演算部と前記ステージ制御手段からのステージ制御信号より前記ステージに対するモーメント力を算出する第3の演算部より構成され、該第3の演算部からの信号に基づき前記ステージ制御手段をフィードフォワード制御することを特徴とする請求項1に記載の露光装置。
- 前記外乱演算手段の第1の演算部は、前記液浸供給手段における供給流量または供給流速と前記液浸供給手段の開口部寸法より供給流速または供給流量を算出し前記供給流量と前記供給流速と前記液浸媒体の密度により印加力を算出し、前記外乱演算手段の第2の演算部は前記液浸回収手段における回収流量または回収流速と前記液浸回収手段の開口部寸法より回収流速または回収流量を算出し前記回収流量と前記回収流速と前記液浸媒体の密度により吸引力を算出することを特徴とする請求項2に記載の露光装置。
- 前記外乱演算手段の第3の演算部は前記ステージの平面をX軸、Y軸、高さ方向をZ軸とした場合、前記ステージの重心位置を原点として前記ステージ制御信号と前記液浸供給手段より供給される液浸媒体の重心位置座標と前記第1の演算部からの前記印加力と前記液浸回収手段より回収される液浸媒体の重心位置座標と前記第2の演算部からの前記吸引力とにより前記ステージに対するX軸周りのモーメント力およびY軸周りのモーメント力を算出することを特徴とする請求項2または請求項3に記載の露光装置。
- 前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力を予め算出して値を保持する外乱記憶手段とを有し該外乱記憶手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御されることを特徴とする請求項1〜請求項4のいずれかに記載の露光装置。
- 前記外乱演算手段は、前記液浸供給手段における流量または流速または加圧力と前記液浸回収手段における流量または流速または吸引圧力と前記ステージ制御手段からのステージ制御信号より前記ステージに印加される外乱力による前記ステージの位置誤差または前記ウエハーの変形を予め算出または測定して保持する外乱記憶手段を有し、該外乱記憶手段からの信号に基づき前記ステージ制御手段により外乱力を打ち消すよう前記ステージが制御されることを特徴とする請求項1〜請求項4のいずれかに記載の露光装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005272224A JP2007088040A (ja) | 2005-09-20 | 2005-09-20 | 露光装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005272224A JP2007088040A (ja) | 2005-09-20 | 2005-09-20 | 露光装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007088040A true JP2007088040A (ja) | 2007-04-05 |
Family
ID=37974757
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005272224A Withdrawn JP2007088040A (ja) | 2005-09-20 | 2005-09-20 | 露光装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007088040A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010008956A (ja) * | 2008-06-30 | 2010-01-14 | Yokohama National Univ | ステージ装置、露光装置、及びステージ制御方法 |
| KR101010297B1 (ko) | 2007-09-27 | 2011-01-24 | 에이에스엠엘 네델란즈 비.브이. | 침지 리소그래피에 관한 방법들 및 침지 리소그래피 장치 |
| CN102346492A (zh) * | 2010-07-26 | 2012-02-08 | Asml荷兰有限公司 | 位置控制系统、光刻设备以及控制可移动物体的位置的方法 |
| KR101173966B1 (ko) | 2009-05-14 | 2012-08-16 | 에이에스엠엘 네델란즈 비.브이. | 침지 리소그래피 장치 및 디바이스 제조 방법 |
-
2005
- 2005-09-20 JP JP2005272224A patent/JP2007088040A/ja not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101010297B1 (ko) | 2007-09-27 | 2011-01-24 | 에이에스엠엘 네델란즈 비.브이. | 침지 리소그래피에 관한 방법들 및 침지 리소그래피 장치 |
| US8587762B2 (en) | 2007-09-27 | 2013-11-19 | Asml Netherlands B.V. | Methods relating to immersion lithography and an immersion lithographic apparatus |
| JP2010008956A (ja) * | 2008-06-30 | 2010-01-14 | Yokohama National Univ | ステージ装置、露光装置、及びステージ制御方法 |
| KR101173966B1 (ko) | 2009-05-14 | 2012-08-16 | 에이에스엠엘 네델란즈 비.브이. | 침지 리소그래피 장치 및 디바이스 제조 방법 |
| CN102346492A (zh) * | 2010-07-26 | 2012-02-08 | Asml荷兰有限公司 | 位置控制系统、光刻设备以及控制可移动物体的位置的方法 |
| JP2012028784A (ja) * | 2010-07-26 | 2012-02-09 | Asml Netherlands Bv | 位置制御システム、リソグラフィ装置、及び可動オブジェクトの位置制御方法 |
| KR101321781B1 (ko) | 2010-07-26 | 2013-10-28 | 에이에스엠엘 네델란즈 비.브이. | 위치 제어 시스템, 리소그래피 장치, 및 이동가능한 대상물의 위치 제어 방법 |
| US8825182B2 (en) | 2010-07-26 | 2014-09-02 | Asml Netherlands B.V. | Position control system, lithographic apparatus, and method to control a position of a movable object |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4878831B2 (ja) | リソグラフィ装置及びデバイス製造方法 | |
| TW200846840A (en) | Stage system and lithographic apparatus comprising such stage system | |
| WO2007077925A1 (ja) | パターン形成方法及びパターン形成装置、並びにデバイス製造方法 | |
| CN1797212A (zh) | 光刻装置和器件制造方法 | |
| CN103620737A (zh) | 驱动系统及驱动方法、曝光装置及曝光方法以及驱动系统设计方法 | |
| CN105493237B (zh) | 移动体装置和曝光装置以及器件制造方法 | |
| KR102130964B1 (ko) | 노광 장치 및 디바이스 제조 방법 | |
| US6504162B1 (en) | Stage device, control system, and method for stabilizing wafer stage and wafer table | |
| JP2007088040A (ja) | 露光装置 | |
| WO2010055673A1 (ja) | 移動体の駆動制御方法、露光方法、ロボット制御方法、駆動制御装置、露光装置、及び、ロボット装置 | |
| US8970821B2 (en) | Positioning apparatus, exposure apparatus and device manufacturing method | |
| JP2005051197A (ja) | ステージ制御方法及び装置、ステージ制御プログラム、露光装置、並びにデバイス製造方法 | |
| JP2007049056A (ja) | ステージ制御方法及び装置、ステージ制御プログラム、露光装置、並びにデバイス製造方法 | |
| JP2004311904A (ja) | ステージ制御装置及び露光装置 | |
| CN102103329B (zh) | 一种用于光刻设备中的光束稳定装置 | |
| US20160004172A1 (en) | Lithographic apparatus and device manufacturing method | |
| JP2009088018A (ja) | ステージ制御方法、ステージ制御装置、露光方法及び露光装置並びにデバイス製造方法 | |
| US7982344B2 (en) | Planar pulse motor, exposure apparatus, and device manufacturing method | |
| JP2002343706A (ja) | ステージ装置及びステージの駆動方法、露光装置及び露光方法、並びにデバイス及びその製造方法 | |
| JP2013114297A (ja) | 駆動システム及び駆動方法、並びに露光装置及び露光方法 | |
| JP2004228383A (ja) | 露光装置 | |
| JP2000269118A (ja) | 露光方法及び露光装置 | |
| JP2010267144A (ja) | 制御装置及び露光装置 | |
| CN113474732A (zh) | 检查设备、光刻设备、测量方法 | |
| JP4186945B2 (ja) | 露光装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20081202 |