JP2006347314A - 自動変速機のシフト装置 - Google Patents
自動変速機のシフト装置 Download PDFInfo
- Publication number
- JP2006347314A JP2006347314A JP2005174844A JP2005174844A JP2006347314A JP 2006347314 A JP2006347314 A JP 2006347314A JP 2005174844 A JP2005174844 A JP 2005174844A JP 2005174844 A JP2005174844 A JP 2005174844A JP 2006347314 A JP2006347314 A JP 2006347314A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- pole
- magnet plate
- sensor
- sensors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
- F16H59/105—Range selector apparatus comprising levers consisting of electrical switches or sensors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20012—Multiple controlled elements
- Y10T74/20018—Transmission control
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
Abstract
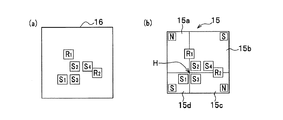
【解決手段】 シフト装置のシフト位置検知装置13は、シフトレバー10の下端部にこのシフトレバー10のシフト操作に応じて移動自在に設置した、複数の平板状のマグネットをN極とS極が隣接するようにして配置して構成された多極マグネット板15と、この多極マグネット板15のシフトレバー10と反対側に各シフト位置に基づいて所定位置に非接触で複数配置した、検出した磁束密度の強弱に応じてON/OFF信号を出力するON・OFFセンサ(S1,S3)と、検出した磁束密度の大きさに応じた出力値を出力するリニアセンサ(R2)とを備えている。
【選択図】 図3
Description
2 制御装置
3 シフト装置
5 エンジン
10 シフトレバー
11 P操作ボタン
13 シフト位置検知装置(シフト位置検知手段)
15 多極マグネット板
15a〜15d マグネット
S1〜S4 ON・OFFセンサ(第1の磁気センサ)
R1,R2 リニアセンサ(第2の磁気センサ)
Claims (2)
- シフト溝に沿って複数のシフト位置に揺動自在に支持されたシフトレバーと、前記シフトレバーを操作したときのシフト位置を検知するシフト位置検知手段とを有する自動変速機のシフト装置において、
前記シフト位置検知手段は、前記シフトレバーの下端部にこのシフトレバーのシフト操
作に応じて移動自在に設置されたマグネット板と、
前記マグネット板の前記シフトレバーと反対側に、前記各シフト位置に基づいて所定位置に非接触で複数配置され、前記マグネット板に対して磁束密度を検出し、検出した磁束密度の強弱に応じてON/OFF信号を出力する第1の磁気センサと、
前記マグネット板の前記シフトレバーと反対側に、前記各シフト位置に基づいて所定位置に非接触で少なくとも1個配置され、前記マグネット板に対して磁束密度を検出し、検出した磁束密度の大きさに応じた出力値を出力する第2の磁気センサと、を備えている、
ことを特徴とする自動変速機のシフト装置。 - 前記マグネット板を、複数の平板状のマグネットをN極とS極が隣接するように配置して形成された多極マグネット板とし、
前記第1の磁気センサを、前記N極における検出特性と前記S極における検出特性との変化を検出した場合にON信号もしくはOFF信号を出力するセンサとし、
前記第2の磁気センサを、前記多極マグネット板のN極もしくはS極に対して磁束密度を検出し、検出した磁束密度の大きさに応じた出力値を出力するセンサとした、
ことを特徴とする請求項1に記載の自動変速機のシフト装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005174844A JP4344343B2 (ja) | 2005-06-15 | 2005-06-15 | 自動変速機のシフト装置 |
| US11/424,143 US7552659B2 (en) | 2005-06-15 | 2006-06-14 | Gearshift device for automatic transmission |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005174844A JP4344343B2 (ja) | 2005-06-15 | 2005-06-15 | 自動変速機のシフト装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006347314A true JP2006347314A (ja) | 2006-12-28 |
| JP4344343B2 JP4344343B2 (ja) | 2009-10-14 |
Family
ID=37572046
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005174844A Expired - Fee Related JP4344343B2 (ja) | 2005-06-15 | 2005-06-15 | 自動変速機のシフト装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7552659B2 (ja) |
| JP (1) | JP4344343B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2000705A2 (en) | 2007-06-07 | 2008-12-10 | Honda Motor Co., Ltd | Shift apparatus |
| JP2009120062A (ja) * | 2007-11-15 | 2009-06-04 | Suzuki Motor Corp | 自動変速機のシフト操作装置 |
| JP2010107376A (ja) * | 2008-10-30 | 2010-05-13 | Honda Motor Co Ltd | 位置検出装置 |
| JP2012046046A (ja) * | 2010-08-26 | 2012-03-08 | Fuji Kiko Co Ltd | シフトレバー装置 |
| US9163957B2 (en) | 2011-09-12 | 2015-10-20 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Position sensor |
| CN107356273A (zh) * | 2016-05-09 | 2017-11-17 | 成都安驭科技有限公司 | 一种提高编码检测装置可靠性的方法 |
| JP2017217997A (ja) * | 2016-06-07 | 2017-12-14 | 株式会社ユーシン | シフト位置検出装置 |
| JP2021128044A (ja) * | 2020-02-13 | 2021-09-02 | 株式会社デンソー | ポジションセンサ |
| WO2024024485A1 (ja) * | 2022-07-26 | 2024-02-01 | パナソニックIpマネジメント株式会社 | 入力装置 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004024954A1 (de) * | 2004-05-21 | 2005-12-08 | Robert Bosch Gmbh | Sensor für eine Getriebesteuerung insbesondere eines Kraftfahrzeugs |
| DE102004060771B4 (de) * | 2004-12-17 | 2006-12-21 | Audi Ag | Vorrichtung zum Schalten von Übersetzungsänderungen |
| KR100800126B1 (ko) * | 2006-08-17 | 2008-01-31 | 에스엘 주식회사 | 전자식 변속 레버 |
| US7983822B2 (en) * | 2006-09-05 | 2011-07-19 | GM Global Technology Operations LLC | Dual wire internal mode switch assembly |
| FR2925139B1 (fr) * | 2007-12-17 | 2010-01-08 | Sc2N Sa | Capteur de position d'une boite de vitesses et boite de vitesses correspondante |
| GB2466185B (en) * | 2008-12-09 | 2013-01-02 | Ford Global Tech Llc | A method and apparatus for establishing the engagement state of a manual transmission |
| DE102009053873A1 (de) * | 2009-11-20 | 2011-06-09 | Ecs Engineered Control Systems Ag | Vorrichtung zum Erfassen der Position eines Schalt- und/oder Wählhebels für ein Getriebe und Schaltvorrichtung für das Getriebe eines Kraftfahrzeuges |
| GB2475846B (en) * | 2009-12-01 | 2016-12-14 | Gm Global Tech Operations Llc | Manual gear shift mechanism |
| CN102725165B (zh) * | 2010-01-19 | 2016-01-13 | 本田技研工业株式会社 | 换档装置 |
| KR101349471B1 (ko) * | 2010-12-09 | 2014-01-10 | 에스엘 주식회사 | 차량의 변속 조작장치 |
| CA2846914A1 (en) * | 2011-09-22 | 2013-03-28 | Tyco Electronics Corporation | Switch assembly and system |
| US8816804B2 (en) | 2011-09-22 | 2014-08-26 | Tyco Electronics Corporation | Switch assembly and system |
| KR101393902B1 (ko) * | 2011-12-13 | 2014-05-12 | 현대자동차주식회사 | 조작성이 향상된 자동변속기의 전자식 변속레버 |
| FR2988339B1 (fr) * | 2012-03-21 | 2014-04-04 | Dura Automotive Systems Sas | Dispositif de detection des positions p, r, n, d, m+, m et m- d'un levier de commande d'une boite de vitesses d'un vehicule automobile |
| FR2993029B1 (fr) | 2012-07-03 | 2014-08-08 | Dura Automotive Systems Sas | Dispositif de captation de la position lineaire d'un organe de transmission sous forme d'un cable assujetti a un levier d'une boite de commande de vitesses d'un vehicule automobile |
| JP6006027B2 (ja) * | 2012-07-18 | 2016-10-12 | 株式会社東海理化電機製作所 | ポジションセンサ |
| KR101384532B1 (ko) * | 2013-05-03 | 2014-04-11 | 현대자동차주식회사 | 전자식 변속 레버 |
| KR101421957B1 (ko) * | 2013-08-06 | 2014-07-22 | 현대자동차주식회사 | 오르간 타입 전자식 변속 레버 |
| GB2532680B (en) | 2013-09-06 | 2020-02-19 | Kongsberg Automotive Ab | Shifter assembly having a pivot mechanism |
| KR101511561B1 (ko) * | 2013-12-18 | 2015-04-13 | 현대자동차주식회사 | 슬라이드 조작 방식 전자식 자동변속레버 |
| DE102014223046A1 (de) * | 2014-11-12 | 2016-05-12 | Zf Friedrichshafen Ag | Kopplungsvorrichtung für einen Schalthebel, Schalthebelvorrichtung und Verfahren zum Herstellen einer Kopplungsvorrichtung |
| US9879775B2 (en) * | 2015-11-13 | 2018-01-30 | Sl Corporation | Shifting lever assembly |
| CN108953596A (zh) * | 2017-05-18 | 2018-12-07 | 泰科电子(上海)有限公司 | 用于感测档位转轴位置的传感系统 |
| CN108953595A (zh) * | 2017-05-18 | 2018-12-07 | 泰科电子(上海)有限公司 | 用于感测档位转轴位置的传感系统 |
| JP7409601B2 (ja) * | 2018-01-05 | 2024-01-09 | 株式会社東海理化電機製作所 | シフト装置 |
| WO2019142519A1 (ja) * | 2018-01-16 | 2019-07-25 | 津田工業株式会社 | シフト装置 |
| JP7281690B2 (ja) * | 2018-09-20 | 2023-05-26 | パナソニックIpマネジメント株式会社 | 位置検出装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW248544B (ja) * | 1991-04-03 | 1995-06-01 | Torrington Co | |
| FR2692956A1 (fr) * | 1992-06-29 | 1993-12-31 | Peugeot | Dispositif de détection de la position et/ou du changement de position d'un levier de manÓoeuvre. |
| US6064197A (en) * | 1997-07-26 | 2000-05-16 | U.S. Philips Corporation | Angle sensor having lateral magnetic field sensor element and axial magnetic field direction measuring element for determining angular position |
| DE19905627B4 (de) * | 1998-02-16 | 2008-09-25 | Luk Gs Verwaltungs Kg | Getriebe für ein Kraftfahrzeug mit einer Wähleinrichtung |
| JP2000123686A (ja) | 1998-10-19 | 2000-04-28 | Matsushita Electric Works Ltd | シフトポジション検出装置 |
| DE19855358A1 (de) | 1998-12-01 | 2000-06-08 | Bosch Gmbh Robert | Vorrichtung und Verfahren zur Ermittlung einer Wegstrecke |
| JP4481438B2 (ja) | 2000-05-31 | 2010-06-16 | 株式会社東海理化電機製作所 | シフト装置 |
| DE10049307B4 (de) * | 2000-10-04 | 2013-01-31 | Volkswagen Ag | Sensorik-System für die Steuereinrichtung eines automatisch schaltbaren Getriebes |
| DE10102843C2 (de) * | 2001-01-22 | 2003-07-17 | Zf Lemfoerder Metallwaren Ag | Schaltvorrichtung zum Umschalten zwischen unterschiedlichen Betriebszuständen eines Kraftfahrzeuggetriebes |
| KR100726546B1 (ko) * | 2005-10-05 | 2007-06-11 | 현대모비스 주식회사 | 차량용 전자식 변속 레버 구조 |
-
2005
- 2005-06-15 JP JP2005174844A patent/JP4344343B2/ja not_active Expired - Fee Related
-
2006
- 2006-06-14 US US11/424,143 patent/US7552659B2/en not_active Expired - Fee Related
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2000705A2 (en) | 2007-06-07 | 2008-12-10 | Honda Motor Co., Ltd | Shift apparatus |
| JP2008302792A (ja) * | 2007-06-07 | 2008-12-18 | Honda Motor Co Ltd | シフト装置 |
| JP4500327B2 (ja) * | 2007-06-07 | 2010-07-14 | 本田技研工業株式会社 | シフト装置 |
| US7966905B2 (en) | 2007-06-07 | 2011-06-28 | Honda Motor Co., Ltd. | Shift apparatus |
| JP2009120062A (ja) * | 2007-11-15 | 2009-06-04 | Suzuki Motor Corp | 自動変速機のシフト操作装置 |
| JP2010107376A (ja) * | 2008-10-30 | 2010-05-13 | Honda Motor Co Ltd | 位置検出装置 |
| JP2012046046A (ja) * | 2010-08-26 | 2012-03-08 | Fuji Kiko Co Ltd | シフトレバー装置 |
| US9163957B2 (en) | 2011-09-12 | 2015-10-20 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Position sensor |
| CN107356273A (zh) * | 2016-05-09 | 2017-11-17 | 成都安驭科技有限公司 | 一种提高编码检测装置可靠性的方法 |
| CN107356273B (zh) * | 2016-05-09 | 2021-04-30 | 成都安驭科技有限公司 | 一种提高编码检测装置可靠性的方法 |
| JP2017217997A (ja) * | 2016-06-07 | 2017-12-14 | 株式会社ユーシン | シフト位置検出装置 |
| JP2021128044A (ja) * | 2020-02-13 | 2021-09-02 | 株式会社デンソー | ポジションセンサ |
| JP7279660B2 (ja) | 2020-02-13 | 2023-05-23 | 株式会社デンソー | ポジションセンサ |
| WO2024024485A1 (ja) * | 2022-07-26 | 2024-02-01 | パナソニックIpマネジメント株式会社 | 入力装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4344343B2 (ja) | 2009-10-14 |
| US20060283276A1 (en) | 2006-12-21 |
| US7552659B2 (en) | 2009-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4344343B2 (ja) | 自動変速機のシフト装置 | |
| US7421923B2 (en) | Electronic gearshift structure for vehicle | |
| WO2011090011A1 (ja) | シフト装置 | |
| JP4806647B2 (ja) | 変速機用操作レバーのレバー操作位置判定装置 | |
| JP2004138235A (ja) | シフトレバー装置 | |
| JP4616708B2 (ja) | 位置検出装置 | |
| JP5033105B2 (ja) | 位置検出装置 | |
| JP6418105B2 (ja) | 車両用シフト装置 | |
| KR20170040927A (ko) | 전자식 변속시스템 | |
| JP4681482B2 (ja) | 自動変速機のシフト操作装置 | |
| JP2008302792A (ja) | シフト装置 | |
| JP2007278720A (ja) | 位置検出装置及びシフト装置 | |
| JP2011080839A (ja) | 位置検出装置及びシフト装置 | |
| JP2000179681A (ja) | 車両用変速機の変速段検出装置 | |
| KR101312178B1 (ko) | 칼럼 타입 변속 레버 장치 | |
| JP2014031143A (ja) | シフト装置 | |
| JP2010018211A (ja) | 磁気式位置検出装置及びシフト装置 | |
| KR101315583B1 (ko) | 차량용 변속기의 변속 조작 감지 장치 | |
| JPWO2019142521A1 (ja) | シフト装置 | |
| JP4612480B2 (ja) | シフト操作装置 | |
| KR102448612B1 (ko) | 전자식 자동변속 시스템 | |
| JP5137197B2 (ja) | ポジションスイッチ装置 | |
| JP4705529B2 (ja) | レンジ切替操作装置 | |
| JP4728118B2 (ja) | 自動変速機のシフト位置検出装置 | |
| KR101432993B1 (ko) | 차량용 자동변속기 시프트 레버 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090127 |
|
| RD13 | Notification of appointment of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7433 Effective date: 20090324 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090327 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20090327 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090707 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090710 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130717 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140717 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |