JP2006166345A - 通信制御装置 - Google Patents
通信制御装置 Download PDFInfo
- Publication number
- JP2006166345A JP2006166345A JP2004358415A JP2004358415A JP2006166345A JP 2006166345 A JP2006166345 A JP 2006166345A JP 2004358415 A JP2004358415 A JP 2004358415A JP 2004358415 A JP2004358415 A JP 2004358415A JP 2006166345 A JP2006166345 A JP 2006166345A
- Authority
- JP
- Japan
- Prior art keywords
- information
- communication control
- sensor
- data
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004891 communication Methods 0.000 title claims abstract description 172
- 230000005540 biological transmission Effects 0.000 claims abstract description 43
- 238000000034 method Methods 0.000 claims description 15
- 230000000737 periodic effect Effects 0.000 claims description 8
- 238000005259 measurement Methods 0.000 abstract description 23
- 238000013500 data storage Methods 0.000 abstract description 21
- 230000006870 function Effects 0.000 description 17
- 238000010586 diagram Methods 0.000 description 11
- 230000001360 synchronised effect Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000013480 data collection Methods 0.000 description 4
- 238000010891 electric arc Methods 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000013585 weight reducing agent Substances 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 244000145845 chattering Species 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
- H04L67/125—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks involving control of end-device applications over a network
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Small-Scale Networks (AREA)
- Communication Control (AREA)
- Selective Calling Equipment (AREA)
Abstract
【解決手段】自動車内に設置されて、ブロードキャストが可能で、且つ定期的に送信権が与えられる通信方式で実現されたネットワーク21上で、定期的に送信される特定信号を受信した時から既定時間経過後の時点におけるセンサ23での計測結果の情報をセンサデータ保存レジスタ49に保持し、ネットワーク21上で送信権を得た時点でその情報を送信する。自動車内の分散した位置の情報を収集する車載ネットワークシステムにおいて、情報の収集時刻の時間差を可及的に低減できる。
【選択図】図2
Description
<車載ネットワークシステムの説明>
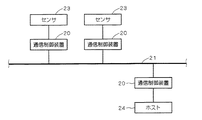
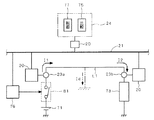
図1は、本発明の一の実施の形態に係る通信制御装置20を使用して構築された車載ネットワークシステムの概要を示すブロック図である。尚、図1においては、後述の通信ドライバ25が図示省略されている。
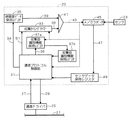
図2は、各センサ23に接続された状態の通信制御装置20を示すブロック図である。各センサ23に接続された通信制御装置20は、所定の同期通信方式等の通信を行う1個のICチップとして構成された半導体集積回路であり、通信プロトコルの物理層及びデータリンク層のみでデータの同期をとるものであり、特に、ホスト24側の通信制御装置20から定期的に送信される特定信号(データではない特殊なパターンの信号)を受信した時点から既定時間が経過した時点の後に、センサ23からの情報をアナログ/デジタル変換して保持し、ネットワーク21上で送信権を得た時点でその情報を送信するように構成されている。
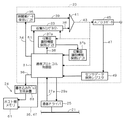
図3は、図1に示した車載ネットワークシステムにおけるホスト24に接続された通信制御装置20を示すブロック図である。図3に示した通信制御装置20の内部構成は、図2に示したセンサ23側の通信制御装置20と全く同一の構成となっており、図2の通信制御装置20と同様にICチップとして構成された半導体集積回路が適用される。
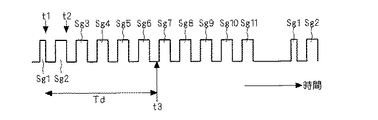
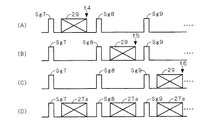
上記構成の通信制御装置の動作のうち、まず、各センサ23側の通信制御装置20において、各センサ23での計測結果の情報を収集する動作について説明する。図4は、ホスト24側の通信制御装置20からネットワーク21に送信される定期通信の信号を示す図であり、横軸は時間を示しており、また信号の縦軸上のハイレベルな状態は、有効なデータが流れている状態を意味している。
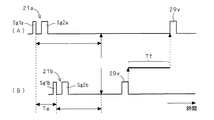
次に、各センサ23側の通信制御装置20において収集された計測結果の情報をホスト24側の通信制御装置20に送信する動作について説明する。
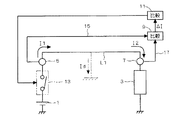
尚、図1〜図3に図示した例では、単一のネットワーク21に複数の通信制御装置20が接続された状態を示しているが、2つのネットワーク21がゲートウェイ(図示省略)を介して接続されている場合であって、異なるネットワーク21に亘って通信制御装置20が分散されて接続されている場合がある。
21 ネットワーク
21a 上位ネットワーク
21b 下位ネットワーク
23,23a,23b センサ
24 ホスト
25 通信ドライバ
27,27a 受信データ
29,29a,29x 送信データ
29y 情報
31 通信プロトコル制御部
33 収集タイミングタイマー
34 受信時間差データ
35 時間差データ保存レジスタ
36 収集回識別カウンタ情報
37a,37b 収集回識別情報保持レジスタ
38 タイマーカウント値
39 保存時間差データ
41 比較器
43 収集タイミング信号
45 コンバータ
47 更新センサデータ
49 センサデータ保存レジスタ
51 サイクル開始タイミング信号
61 ホスト側メモリ
63 アドレス生成装置
71 電源
73 負荷
75 比較回路
77 制御回路
79 駆動制御回路
81 遮断器
83 電池
85 組電池
Claims (4)
- 自動車内に設置されて、ブロードキャストが可能で、且つ定期的に送信権が与えられる通信方式で実現されたネットワーク上で、定期的に送信される特定信号を受信した時から既定時間経過後の時点における所定の情報を保持し、前記ネットワーク上で送信権を得た時点でその情報を送信することを特徴とする通信制御装置。
- 請求項1に記載の通信制御装置であって、
前記所定の情報が、センサからの情報であることを特徴とする通信制御装置。 - 請求項1または請求項2に記載の通信制御装置であって、
特定信号の中に時間指定情報を入れることにより、前記所定の情報を収集するタイミングである既定時間情報を変更することが可能とされたことを特徴とする通信制御装置。 - 請求項1から請求項3のいずれかに記載の通信制御装置であって、
特定信号の中に送信毎に巡回的に増加するID情報を含ませ、情報送信側において、受信した前記ID情報と前記所定の情報とを同時に送信し、情報収集側において、送られてくる前記所定の情報を格納するホストメモリアドレスを前記ID情報によって変更することを特徴とする通信制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004358415A JP4313754B2 (ja) | 2004-12-10 | 2004-12-10 | 通信制御装置 |
| DE112005003022T DE112005003022T5 (de) | 2004-12-10 | 2005-12-09 | Kommunikationssteuervorrichtung |
| US11/791,029 US8224521B2 (en) | 2004-12-10 | 2005-12-09 | Communication control apparatus |
| PCT/JP2005/022667 WO2006062193A1 (ja) | 2004-12-10 | 2005-12-09 | 通信制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004358415A JP4313754B2 (ja) | 2004-12-10 | 2004-12-10 | 通信制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006166345A true JP2006166345A (ja) | 2006-06-22 |
| JP4313754B2 JP4313754B2 (ja) | 2009-08-12 |
Family
ID=36578013
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004358415A Expired - Fee Related JP4313754B2 (ja) | 2004-12-10 | 2004-12-10 | 通信制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8224521B2 (ja) |
| JP (1) | JP4313754B2 (ja) |
| DE (1) | DE112005003022T5 (ja) |
| WO (1) | WO2006062193A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008048469A (ja) * | 2006-08-10 | 2008-02-28 | Matsushita Electric Works Ltd | 配電システム |
| JP2013063710A (ja) * | 2011-09-19 | 2013-04-11 | Denso Corp | 車両制御システム |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9377498B2 (en) * | 2006-12-11 | 2016-06-28 | Electrical Grid Monitoring Ltd. | Fault prediction in electronic transmission networks |
| JP5825100B2 (ja) * | 2011-05-31 | 2015-12-02 | 富士通株式会社 | センサデータ収集システム |
| JP6399136B1 (ja) * | 2017-03-31 | 2018-10-03 | オムロン株式会社 | 制御装置、制御プログラム、および制御システム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61201538A (ja) | 1985-03-05 | 1986-09-06 | Meisei Electric Co Ltd | コ−ル式テレメ−タ方式 |
| US4742335A (en) * | 1986-06-18 | 1988-05-03 | Baker Industries, Inc. | Sequential and/or random polling system with virtually instantaneous response time |
| JP2553688B2 (ja) | 1989-01-30 | 1996-11-13 | 日東工器株式会社 | 複数点同時計測システム |
| US5434861A (en) * | 1989-02-02 | 1995-07-18 | Pritty; David | Deterministic timed bus access method |
| US4982185A (en) * | 1989-05-17 | 1991-01-01 | Blh Electronics, Inc. | System for synchronous measurement in a digital computer network |
| JP2564965B2 (ja) | 1990-04-18 | 1996-12-18 | 富士電機株式会社 | 個体識別装置 |
| US6013108A (en) * | 1997-03-18 | 2000-01-11 | Endevco Corporation | Intelligent sensor system with network bus |
| JP2001037068A (ja) | 1999-07-16 | 2001-02-09 | Auto Network Gijutsu Kenkyusho:Kk | 車両の給電回路における漏電検知方法及び装置並びに漏電阻止方法及び装置 |
| US20020012401A1 (en) * | 2000-05-23 | 2002-01-31 | Endevco Corporation | Transducer network bus |
| DE10048808A1 (de) | 2000-09-29 | 2002-04-18 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung von Betriebsabläufen |
| JP3936179B2 (ja) | 2001-11-30 | 2007-06-27 | パナソニック・イーブイ・エナジー株式会社 | 電池電源装置とその電流検出方法 |
| DE10133962A1 (de) * | 2001-07-17 | 2003-02-06 | Bosch Gmbh Robert | Verfahren zur Synchronisation und Vorrichtung |
| FR2837296B1 (fr) * | 2002-03-15 | 2004-06-25 | Airbus France | Dispositif et procede d'acquisition de mesures a l'aide d'un bus de communication numerique, utilises notamment lors des essais d'un aeronef |
| JP4105692B2 (ja) * | 2002-08-12 | 2008-06-25 | 新川センサテクノロジ株式会社 | 振動情報送信装置および振動監視解析システム |
| US7269095B2 (en) * | 2002-10-04 | 2007-09-11 | Aram Systems, Ltd. | Synchronization of seismic data acquisition systems |
| US7999695B2 (en) * | 2004-03-03 | 2011-08-16 | Halliburton Energy Services, Inc. | Surface real-time processing of downhole data |
| US7593429B2 (en) * | 2004-10-14 | 2009-09-22 | Temic Automotive Of North America, Inc. | System and method for time synchronizing nodes in an automotive network using input capture |
-
2004
- 2004-12-10 JP JP2004358415A patent/JP4313754B2/ja not_active Expired - Fee Related
-
2005
- 2005-12-09 DE DE112005003022T patent/DE112005003022T5/de not_active Ceased
- 2005-12-09 US US11/791,029 patent/US8224521B2/en not_active Expired - Fee Related
- 2005-12-09 WO PCT/JP2005/022667 patent/WO2006062193A1/ja not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008048469A (ja) * | 2006-08-10 | 2008-02-28 | Matsushita Electric Works Ltd | 配電システム |
| JP2013063710A (ja) * | 2011-09-19 | 2013-04-11 | Denso Corp | 車両制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080195260A1 (en) | 2008-08-14 |
| WO2006062193A1 (ja) | 2006-06-15 |
| US8224521B2 (en) | 2012-07-17 |
| JP4313754B2 (ja) | 2009-08-12 |
| DE112005003022T5 (de) | 2007-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7620075B2 (en) | Serial communication system with baud rate generator | |
| EP3396900B1 (en) | Fraudulent message detection | |
| KR101575547B1 (ko) | 캔 통신 시스템의 에러 분산감지 방법 및 캔 통신 시스템 | |
| US8099537B2 (en) | Method, device, and system for transmitting data fragments over multiple transmission lines and techniques for stopping data transmission | |
| KR101526413B1 (ko) | 트랜시버 ic 및 그 동작 방법 | |
| JP7119437B2 (ja) | 車両用マスタ電子制御装置、車両用スレーブ電子制御装置、車両用ログ収集システム及び車両用ログ収集プログラム | |
| JP2014175755A (ja) | 同期計測システム | |
| CN114846752B (zh) | 用于检查以太网车载网络的传感器数据有效性的方法 | |
| CN114902613A (zh) | 车载装置、管理装置、劣化判断方法、变化要因判别方法、异常要因判别方法以及异常要因判别程序 | |
| JP4313754B2 (ja) | 通信制御装置 | |
| CN113507337A (zh) | 时钟同步精度的确定方法、装置、介质及设备 | |
| US20110016232A1 (en) | Time stamping apparatus and method for network timing synchronization | |
| US7096295B2 (en) | Method and device for generating program interruptions in users of a bus system, and bus system | |
| JP2005529319A (ja) | ネットワーク部品の接地オフセットを検出するための回路 | |
| CN119583000A (zh) | 车载网络时间同步方法、装置、存储介质及电子设备 | |
| US9971722B2 (en) | Onboard apparatus, and onboard communication system | |
| KR20190071465A (ko) | 차량 네트워크 시간 동기화 평가 방법 | |
| KR101481132B1 (ko) | 차량용 네트워크에서의 데이터 출력 시간 동기화 장치 및 방법 | |
| JP4356362B2 (ja) | バス通信システムの検査方法及び通信装置 | |
| KR101446640B1 (ko) | 통신 시스템 및 중첩 장치 | |
| JP6762546B1 (ja) | シリアル通信方法及びシリアル通信システム | |
| JP7072231B2 (ja) | 通信装置、通信システム、通信方法、及び、プログラム | |
| KR20160118049A (ko) | 전자 장치, 이의 비동기 방식 데이터 전송 방법 및 광학 이미지 안정화 모듈 | |
| CN120639234B (zh) | Tmr传感器网络自同步授时方法、装置、设备及介质 | |
| JP6627958B1 (ja) | 通信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090512 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090515 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120522 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130522 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140522 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |