JP2006117143A - 通信システムおよび車輪側無線送信装置 - Google Patents
通信システムおよび車輪側無線送信装置 Download PDFInfo
- Publication number
- JP2006117143A JP2006117143A JP2004308185A JP2004308185A JP2006117143A JP 2006117143 A JP2006117143 A JP 2006117143A JP 2004308185 A JP2004308185 A JP 2004308185A JP 2004308185 A JP2004308185 A JP 2004308185A JP 2006117143 A JP2006117143 A JP 2006117143A
- Authority
- JP
- Japan
- Prior art keywords
- type
- data
- physical state
- wheel
- communication speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C23/00—Devices for measuring, signalling, controlling, or distributing tyre pressure or temperature, specially adapted for mounting on vehicles; Arrangement of tyre inflating devices on vehicles, e.g. of pumps or of tanks; Tyre cooling arrangements
- B60C23/02—Signalling devices actuated by tyre pressure
- B60C23/04—Signalling devices actuated by tyre pressure mounted on the wheel or tyre
- B60C23/0408—Signalling devices actuated by tyre pressure mounted on the wheel or tyre transmitting the signals by non-mechanical means from the wheel or tyre to a vehicle body mounted receiver
- B60C23/0422—Signalling devices actuated by tyre pressure mounted on the wheel or tyre transmitting the signals by non-mechanical means from the wheel or tyre to a vehicle body mounted receiver characterised by the type of signal transmission means
- B60C23/0433—Radio signals
- B60C23/0447—Wheel or tyre mounted circuits
- B60C23/0455—Transmission control of wireless signals
- B60C23/0462—Structure of transmission protocol
Abstract
【課題】 車輪の物理状態を検出して、その物理状態を車体側に無線通信を用いて伝える通信システムにおいて、新規な方法で、通信データの短縮化を実現する。
【解決手段】
車輪側無線送信装置は、検出した車輪のタイヤ内空気圧に基づいた通信速度で、タイヤ内温度に基づいたデューティー比のデータフレームを無線送信し(ステップ110〜140)、車体側無線受信装置は、その無線送信されたデータの通信速度に基づいて車輪のタイヤ内空気圧およびタイヤ内温度のデータを記憶媒体に記憶させる。
【選択図】 図6
【解決手段】
車輪側無線送信装置は、検出した車輪のタイヤ内空気圧に基づいた通信速度で、タイヤ内温度に基づいたデューティー比のデータフレームを無線送信し(ステップ110〜140)、車体側無線受信装置は、その無線送信されたデータの通信速度に基づいて車輪のタイヤ内空気圧およびタイヤ内温度のデータを記憶媒体に記憶させる。
【選択図】 図6
Description
本発明は、車輪の物理状態を検出して、その物理状態を車体側に無線通信を用いて伝える通信システム、およびその通信システムに用いられる車輪側無線送信装置に関する。
従来、タイヤ内空気圧を検出し、それをデータとして無線送信する車輪側無線送信装置と、この車輪側無線送信装置が送信したタイヤ内空気圧のデータを受信し、そのデータを記憶媒体に記憶させると共に、そのデータに基づきユーザに対して警告等の表示を行う車体側受信装置とを備えたタイヤ空気圧監視システムが実用化されている。
このタイヤ空気圧監視システムのような、車輪の物理状態(上記のタイヤ空気圧監視システムにおいてはタイヤ内空気圧)を検出し、その物理状態を車体側に無線通信を用いて伝える通信システムは、従来、その物理状態を示す専用のビット列範囲を含むデータの送受信を行うことで、当該物理状態を車輪側から車体側に伝えるようになっていた。
図12に、車輪側から車体側にタイヤ内空気圧とタイヤ内温度とを伝える通信システムにおける、従来の通信データの構成の一例を示す。この図12に示す通信データは、タイヤ内空気圧とタイヤ内温度の一回分の送信に1つ用いられる、62ビット長のフレームである。そしてこのフレームは、1ビット長のスタートビット部201、4ビット長の同期部202、32ビット長のID(各車輪を識別する符号に相当する)部203、8ビット長の圧力部204、8ビット長の温度部205、8ビット長の誤り検出部206、1ビット長のストップビット部207を、この順に並べて有している。ここで、圧力部204の内容が、検出したタイヤ内空気圧の値を示し、温度部205の内容が、検出したタイヤ内温度の値を示すようになっている。すなわち、圧力部204、および温度部205はそれぞれの物理状態を示す専用のビット列範囲である。
ことろで、車輪側無線送信装置は、車輪の回転と共にその位置や速度が変化するので、車輪の回転角によっては通信がうまくいかない場合がある。図13に、上記のタイヤ空気圧監視システムにおける、車輪側無線送信装置の位置と、その位置において車輪側無線送信装置から送信されたデータの、車体側受信装置における受信レベルとの関係の一例のグラフを示す。横軸が、車輪の回転軸の回りの回転角で表した車輪側無線送信装置の位置を示し、縦軸が、車体側受信装置における受信レベルを示す。折れ線208が、受信レベルの基準値を示す水平線209を下回る領域210において、車輪側無線送信装置から送信されたデータは、車体側受信装置で受信が困難または不可能となる。
このように、車輪側無線送信装置の位置によっては通信がうまくいかない場合があるので、1回のデータ送信中に車輪側無線送信装置がこの通信が位置にさしかかることが少なくなるよう、できるだけ短時間で物理状態の送信を完了したいというニーズがある。物理状態の送信を短時間で済ます方法としては、例えば通信を高速化する方法が考えられる。しかし、通信速度が高くなれば、受信感度が低下するためビット当たりのエラー確率が高くなってしまうという問題がある。
また、特許文献1に開示されているように、送信されるデータ中のID部のビット長を通常よりも減らすことも考えられる。
特開2000−238515号公報
しかし、この場合、ID部の値が取りうる範囲が狭まるので、車輪が一意に特定できない可能性があるという問題がある。
本発明は上記点に鑑み、車輪の物理状態を検出して、その物理状態を車体側に無線通信を用いて伝える通信システムにおいて、新規な方法で、通信データの短縮化を実現することを目的とする。
上記目的を達成するための請求項1に記載の発明は、車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、前記車輪側無線送信装置は、前記車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいた通信速度でデータを無線送信する送信手段と、を有し、前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータの通信速度を特定する特定手段と、前記特定手段が特定した通信速度に基づいて、前記車輪の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システムである。
このようになっているので、通信システムにおいて、車輪側無線送信装置は、検出した車輪の物理状態に基づいた通信速度でデータを無線送信し、車体側無線受信装置は、その無線送信されたデータの通信速度に基づいて車輪の物理状態のデータを特定し記憶媒体に記憶させるので、送受信されるデータの通信速度によって物理状態が車輪側から車体側に伝わる。このように、データの通信速度という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、請求項2に記載の発明は、請求項1に記載の通信システムにおいて、前記物理状態は、前記車輪が有するタイヤ内空気圧であり、前記送信手段は、前記検出手段が検出した前記タイヤ内空気圧が低いほど高い通信速度でデータを無線送信することを特徴とする。
このようになっていると、タイヤ内空気圧が低いほど、すなわちタイヤ異常である可能性が高いほど、通信速度が速くなり、このタイヤ内空気圧の情報を迅速に車両側に伝えることができるので、安全確保という面で都合がよい。
また、請求項3に記載の発明は、請求項1または2に記載の通信システムにおいて、前記送信手段は、通信速度が高いほど多い繰り返し回数で、同じ物理状態についてのデータ送信を繰り返すことを特徴とする。
また、請求項4に記載の発明は、車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、
前記車輪側無線送信装置は、前記車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいたデューティー比でデータを無線送信する送信手段と、を有し、前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータのデューティー比を特定する特定手段と、前記特定手段が特定したデューティー比に基づいて、前記車輪の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システムである。
前記車輪側無線送信装置は、前記車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいたデューティー比でデータを無線送信する送信手段と、を有し、前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータのデューティー比を特定する特定手段と、前記特定手段が特定したデューティー比に基づいて、前記車輪の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システムである。
このようになっているので、通信システムにおいて、車輪側無線送信装置は、検出した車輪の物理状態に基づいたデューティー比でデータを無線送信し、車体側無線受信装置は、その無線送信されたデータのデューティー比に基づいて車輪の物理状態のデータを記憶媒体に記憶させるので、送受信されるデータのデューティー比によって物理状態が車輪側から車体側に伝わる。このように、データのデューティー比という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、請求項5に記載の発明は、請求項1ないし4のいずれか1つに記載の通信システムにおいて、前記検出手段は、前記車輪の複数種類の物理状態を検出し、前記送信手段は、前記複数種類のデータのそれぞれの種類についての送信を別々のデータで行い、送信するデータに係る物理状態の種類に基づいたビットフォーマットで、当該データを無線送信することを特徴とする。
このようにすることで、車輪の複数種類の物理状態のそれぞれを、別々のデータで送信することが可能となる。
また、請求項6に記載の発明は、請求項1ないし4のいずれか1つに記載の通信システムにおいて、前記検出手段は、前記車輪の複数種の物理状態を検出し、前記送信手段は、前記複数種類のデータのそれぞれの種類についての送信を別々のデータで行い、送信するデータに係る物理状態の種類に基づいた切替ビット値を当該データに含めて無線送信することを特徴とする。
このようにすることで、車輪の複数種類の物理状態のそれぞれを、別々のデータで送信することが可能となる。
また、請求項7に記載の発明は、車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、前記車輪側無線送信装置は、前記車輪の第1種類の物理状態および第2種類の物理状態を検出する検出手段と、前記検出手段が検出した前記第1種類の物理状態に基づいた通信速度、および前記検出手段が検出した前記第2種類の物理状態に基づいたデューティー比で、データを無線送信する送信手段と、を有し、前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータの通信速度およびデューティー比を特定する特定手段と、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システムである。
このようになっているので、通信システムにおいて、車輪側無線送信装置は、検出した車輪の第1種類の物理状態に基づいた通信速度、および第2種類の物理状態に基づいたデューティー比で、データを無線送信し、車体側無線受信装置は、その無線送信されたデータの通信速度に基づいて車輪の第1種類および第2種類の物理状態のデータを記憶媒体に記憶させるので、送受信されるデータの通信速度の大小およびデューティー比によって物理状態が車輪側から車体側に伝わる。このように、データの通信速度およびデューティー比という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、請求項8に記載の発明は、請求項7に記載の通信システムにおいて、前記第1種類の物理状態は、前記車輪が有するタイヤ内空気圧であり、前記送信手段は、前記検出手段が検出した前記タイヤ内空気圧が低いほど高い通信速度でデータを無線送信することを特徴とする。
このようになっていると、タイヤ内空気圧が低いほど、すなわちタイヤ異常である可能性が高いほど、通信速度が速くなり、このタイヤ内空気圧の情報を迅速に車両側に伝えることができるので、安全確保という面で都合がよい。
また、請求項9に記載の発明は、請求項7または8に記載の通信システムにおいて、前記送信手段は、通信速度が高いほど多い繰り返し回数で、同じ前記第1種類および前記第2種類の物理状態についてのデータ送信を繰り返すことを特徴とする。
また、請求項10に記載の発明は、請求項7ないし9のいずれか1つに記載の通信システムにおいて、前記検出手段は、第3種類の物理状態を検出し、前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態とは別のデータで、前記第1種類および第2種類の物理状態と異なるビットフォーマットで、前記検出手段が検出した前記第3種類の物理状態に基づいた通信速度で、当該データを無線送信し、前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、およびビットフォーマットを特定し、前記記憶制御手段は、前記特定手段が特定した通信速度およびビットフォーマットに基づいて、前記第1種類または第3種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させることを特徴とする。
このようにすることで、車輪の第3種類の複数の物理状態を、第1種類および第2種類物理状態とは別のデータで送信することが可能となる。
また、請求項11に記載の発明は、請求項7ないし9のいずれか1つに記載の通信システムにおいて、前記検出手段は、第3種類の物理状態を検出し、前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態とは別のデータで、前記第種類1および第2種類の物理状態と異なるビットフォーマットで、前記検出手段が検出した前記第3種類の物理状態に基づいたデューティー比で、当該データを無線送信し、前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、およびビットフォーマットを特定し、前記記憶制御手段は、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したビットフォーマットおよびデューティー比に基づいて、前記第2種類または第3種類の物理状態のデータを記憶媒体に記憶させることを特徴とする。
このようにすることで、車輪の第3種類の複数の物理状態を、第1種類および第2種類物理状態とは別のデータで送信することが可能となる。
また、請求項12に記載の発明は、請求項7ないし9のいずれか1つに記載の通信システムにおいて、前記検出手段は、第3種類の物理状態を検出し、前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態についての送信とは別のデータで、前記第1種類および第2種類の物理状態についての送信と異なる切替ビット値を当該データに含めて、前記検出手段が検出した前記第3種類の物理状態に基づいた通信速度で、無線送信し、前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、および前記切替ビット値を特定し、前記記憶制御手段は、前記特定手段が特定した通信速度および前記切替ビット値に基づいて、前記第1種類または第3種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させることを特徴とする。
このようにすることで、車輪の第3種類の複数の物理状態を、第1種類および第2種類物理状態とは別のデータで送信することが可能となる。
また、請求項13に記載の発明は、請求項7ないし9のいずれか1つに記載の通信システムにおいて、前記検出手段は、第3種類の物理状態を検出し、前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態についての送信とは別のデータで、前記第1種類および第2種類の物理状態についての送信と異なる切替ビット値を当該データに含めて、前記検出手段が検出した前記第3種類の物理状態に基づいたデューティー比で、無線送信し、前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、および前記切替ビット値を特定し、前記記憶制御手段は、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定した前記切替ビット値およびデューティー比に基づいて、前記第2種類または第3種類の物理状態のデータを記憶媒体に記憶させることを特徴とする。
このようにすることで、車輪の第3種類の複数の物理状態を、第1種類および第2種類物理状態とは別のデータで送信することが可能となる。
また、請求項14に記載の発明は、車輪に取り付けられるものであって、車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいた通信速度でデータを無線送信する送信手段と、を備えた車輪側無線送信装置である。
このようになっているので、車輪側無線送信装置は、検出した車輪の物理状態に基づいた通信速度でデータを無線送信する。したがって、この送信されたデータを受信する側、すなわち車体側無線受信装置が、その無線送信されたデータの通信速度に基づいて車輪の物理状態を特定するようになっていれば、送受信されるデータの通信速度によって物理状態が車輪側から車体側に伝わる。このように、データの通信速度という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、請求項15に記載の発明は、車輪に取り付けられるものであって、車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいたデューティー比のデータを無線送信する送信手段と、を備えた車輪側無線送信装置である。
このようになっているので、車輪側無線送信装置は、検出した車輪の物理状態に基づいたデューティー比のデータを無線送信する。したがって、この送信されたデータを受信する側、すなわち車体側無線受信装置が、その無線送信されたデータのデューティー比に基づいて車輪の物理状態を特定するようになっていれば、送受信されるデータのデューティー比によって物理状態が車輪側から車体側に伝わる。このように、データのデューティー比という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、請求項16に記載の発明は、車輪に取り付けられるものであって、前記車輪の第1種類の物理状態および第2種類の物理状態を検出する検出手段と、前記検出手段が検出した前記第1種類の物理状態に基づいた通信速度、および前記検出手段が検出した前記第2種類の物理状態に基づいたデューティー比で、データを無線送信する送信手段と、を備えた車輪側無線送信装置である。
このようになっているので、車輪側無線送信装置は、検出した車輪の第1種類の物理状態に基づいた通信速度、および第2種類の物理状態に基づいたデューティー比で、データを無線送信する。したがって、この送信されたデータを受信する側、すなわち車体側無線受信装置が、その無線送信されたデータの通信速度に基づいて車輪の第1種類および第2種類の物理状態を特定するようになっていれば、送受信されるデータの通信速度およびデューティー比によって物理状態が車輪側から車体側に伝わる。このように、データの通信速度およびデューティー比という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
(第1実施形態)
以下、本発明の第1実施形態について図1〜図9に基づいて説明する。図1は、本実施形態を示す車両の概略斜視図で、図2は本実施形態の通信システムの概略構成を示すブロック図である。図1および図2に示すように、本実施形態の通信システムは、車輪側無線送信装置11〜14、車体側無線受信モジュール21〜24、制御装置30、および表示装置60、を備えている。
以下、本発明の第1実施形態について図1〜図9に基づいて説明する。図1は、本実施形態を示す車両の概略斜視図で、図2は本実施形態の通信システムの概略構成を示すブロック図である。図1および図2に示すように、本実施形態の通信システムは、車輪側無線送信装置11〜14、車体側無線受信モジュール21〜24、制御装置30、および表示装置60、を備えている。
車輪側無線送信装置11〜14は、タイヤとホイールディスクから成る各車輪1〜4のホイールディスクのバルブ部分にそれぞれ設けられている。図3は、本実施形態の車輪側無線送信装置11〜14の概略構成を示すブロック図である。図3に示すように、車輪側無線送信装置11〜14は、それぞれセンサ部11a〜14a、送信アンテナ11b〜14b、送信回路11c〜14c、内蔵電池11d〜14d、および車輪側制御部11e〜14eを備えている。
センサ部11a〜14aは、タイヤ内の空気圧を検出し、その検出した空気圧に基づく信号をそれぞれ車輪側制御部11e〜14eに出力するタイヤ内空気圧センサ、および、タイヤ内の温度を検出し、その検出した温度に基づく信号をそれぞれ車輪側制御部11e〜14eに出力する温度センサを有している。
送信回路11c〜14cは、それぞれ車輪側制御部11e〜14eから受けたデータを、それぞれ送信アンテナ11b〜14bを用いて無線送信するものである。
内蔵電池11d〜14dは、それぞれ車輪側無線送信装置11〜14の各構成要素に電源供給するものである。
車輪側制御部11e〜14eは、周知のマイクロコンピュータとして構成することができる。車輪側メモリ11f〜14fは、DRAM、SRAM、フラッシュメモリ等から構成され、それぞれ車輪側制御部11e〜14eで実行されるプログラムおよび各種データを記憶する。
この車輪側制御部11e〜14eは、後述するように、このプログラムを実行することで、それぞれセンサ部11a〜14aから受けたタイヤ内空気圧およびタイヤ内温度を、繰り返し送信回路11c〜14cに出力する。これによって、送信回路11c〜14cが、それぞれ対応する車体側無線受信モジュール21〜24に対して、対応するタイヤのタイヤ内空気圧、タイヤ内温度を送信する。
車体側無線受信モジュール21〜24は、それぞれ各車輪1〜4に隣接した車体側部位(具体的にはホイールハウス70内)に取り付けられ、それぞれ対応する車輪1〜4に取り付けられた車輪側無線送信装置11〜14から送信される電波を無線受信する受信アンテナと、その受信アンテナが受信した信号に所定の周波数変換、復調、A/D変換等の処理を施し、その処理結果の信号を、信号線80を介して制御装置30に送信する無線受信回路と、を備えている。なお、各車体側無線受信モジュール21〜24のそれぞれの無線受信回路から制御装置30への信号の送信は、図2のような有線式に限らず、無線式とすることもできる。また、車体側無線受信モジュール21〜24は、このように車体の4つの位置に分散しておらずともよく、例えば1つの無線受信モジュールが車体の中心付近に配され、車輪側無線送信装置11〜14からの無線信号を受信して制御装置30に出力するようになっていてもよい。また、この場合、車体後部等に置かれたスペア車輪の車輪側無線送信装置から送信された信号も受信するようになっていてよい。
制御装置30は、CPU、RAM、ROM、I/O等を備えた周知のマイクロコンピュータであり、ROM内に記憶されたプログラムに従って所定の作動を実現するようになっている。また制御装置30は、その作動において、車体側無線受信モジュール21〜24からデータを受け取り、ユーザインターフェース60および図示しないホーンやハザードに制御信号を出力し、また、ユーザインターフェース60からユーザの操作に基づく信号を受ける。
ユーザインターフェース60は、車両の走行距離等を表示するものであり、例えば液晶パネルが用いられる。またユーザインターフェース60は、ボタン等のユーザが操作可能な操作装置を有し、その操作装置に対するユーザの操作に基づく信号を制御装置30に出力する。
以下、上記のような構成の通信システムの作動について説明する。まず、図4に、この通信システムにおいて車輪側無線送信装置11〜14からそれぞれ車体側無線受信モジュール21〜24に送信されるデータフレーム90の構成を示す。データの無線配送の一単位であるデータフレーム90は、全体として46ビットのデータから成る。そして、データフレーム90のデータは、その先頭から順に、1ビット長のスタートビット部91、4ビット長の同期部92、32ビット長のID部93、8ビット長の誤り検出部94、1ビット長のストップビット部95に分かれている。
スタートビット部91およびストップビット部95は、それぞれデータフレーム90の先頭および後端であることを示すためのデータを含む部分である。同期部92は、通信の同期を確保するためのデータを含む部分である。ID部93は、個々の車輪を区別するためのIDを含む部分である。誤り検出部94は、チェックサム等、データフレーム90の伝送誤りを検出、修正するためのデータを含む部分である。本実施形態においては、データフレーム90中には、タイヤ内空気圧、タイヤ内温度等の車輪の物理状態を示すデータは含まれていない。
また、本実施形態においては、この通信システムにおいて無線送受信されるデータフレーム90をデジタル信号として搬送する形式、すなわち、データフレーム90のビットフォーマットとしては、ディファレンシャルバイフェイズ符号を採用する。図5に、このディファレンシャルバイフェイズ符号における、ハイ・ロー信号と、ビットの1、0の値との対応関係を示すための波形図を示す。この図に示す通り、ディファレンシャルバイフェイズ符号においては、信号の各ビットの境目(位置141〜147に相当する)において、信号レベルがハイからローへ、またはローからハイへ変化するようになっている。また、“1”のビット値を示す信号は、そのビットに相当する期間(期間151、154に相当する)、ハイまたはローのレベルを維持する。また、“0”のビット値を示す信号は、そのビットに相当する期間の開始時と終了時との間(以下中間期間と呼ぶ)で、そのレベルをハイからローへ、またはローからハイへ変化するようになっている。
なお、以下では、1ビットに相当する信号の期間をビット幅と呼び、“0”のビット値を示す信号において、そのビットに相当する期間の最初から、信号レベルが変化するまでの時間を、そのビットのビット幅で除算した値を、単にデューティー比と呼ぶ。
本実施形態においては、データフレーム90の各ビットの内容ではなく、送受信するデータフレーム90の通信速度およびデューティー比によって、車輪の物理状態を伝えるようになっている。なお、通信速度は、ビット幅の逆数に相当する量である。
このような作動を実現するため、車輪側制御部11e〜14eは、図6に示すような送信プログラム100を繰り返し実行するようになっている。なお、送信プログラム100の実行は、一定時間周期(例えば1分周期)で行ってもよいし、センサ部11a〜14aから受けたタイヤ内空気圧やタイヤ内温度が所定幅以上変化する度に行ってもよい。
車輪側制御部11e〜14eは、この送信プログラム100の実行を開始すると、まずステップ110で、センサ部11a〜14aのタイヤ内空気圧センサから空気圧の信号を取得し、さらに、タイヤ内温度センサから温度の信号を取得する。
続いてステップ120で、その取得したタイヤ内空気圧に基づいて、データフレーム90の送信における通信速度を算出する。算出式としては、例えば
(数1)
通信速度=速度係数/タイヤ内空気圧+基本速度
を用いる。ここで、速度係数および基本速度は、タイヤ内空気圧が0キロパスカルのときに、通信速度が5kbpsとなり、タイヤ内空気圧が400キロパスカルのときに、通信速度が3kbpsとなるような定数とする。なお、タイヤ空気圧センサの圧力分解能が4キロパスカルである場合、通信速度は平均20bps刻みで変動することになる。
通信速度=速度係数/タイヤ内空気圧+基本速度
を用いる。ここで、速度係数および基本速度は、タイヤ内空気圧が0キロパスカルのときに、通信速度が5kbpsとなり、タイヤ内空気圧が400キロパスカルのときに、通信速度が3kbpsとなるような定数とする。なお、タイヤ空気圧センサの圧力分解能が4キロパスカルである場合、通信速度は平均20bps刻みで変動することになる。
続いてステップ125で、ステップ110にて取得したタイヤ内温度に基づいて、データフレーム90の送信におけるデューティー比を算出する。算出式としては、例えば
(数2)
デューティー比=係数×タイヤ内温度+基本比
を用いる。ここで、係数および基本比は、タイヤ内温度が−40℃のときにデューティー比が30パーセントとなり、タイヤ内温度が80℃のときにデューティー比が70パーセントとなるような定数とする。なお、タイヤ内温度センサの温度分解能が1℃である場合、デューティー比は約0.33パーセント刻みで変動することになる。
デューティー比=係数×タイヤ内温度+基本比
を用いる。ここで、係数および基本比は、タイヤ内温度が−40℃のときにデューティー比が30パーセントとなり、タイヤ内温度が80℃のときにデューティー比が70パーセントとなるような定数とする。なお、タイヤ内温度センサの温度分解能が1℃である場合、デューティー比は約0.33パーセント刻みで変動することになる。
続いてステップ130で、送信回数を算出する。ここでいう送信回数とは、同じタイヤ内空気圧およびタイヤ内温度、すなわち同じ今回のステップ110で取得したタイヤ内空気圧およびタイヤ内温度について、データフレーム90を何回送信するかについての値である。具体的には、所定の送信可能期間(例えば21ミリ秒)内にその通信速度で送信できるデータフレーム90の最大数を算出する。例えば、通信速度が4kbpsの場合、データフレーム90を1つ送信するのに11.5ミリ秒かかるので、21ミリ秒内に送信できるデータフレーム90の最大数は1である。
続いてステップ140で、ステップ120で決定した通信速度で、ステップ125で決定したデューティー比で、データフレーム90を、ステップ130で決定した回数だけ、繰り返し送信回路11c〜14cに出力する。これによって、送信回路11c〜14cは、当該通信速度および当該デューティー比で、データフレーム90を、当該回数だけ、繰り返し無線送信する。このとき、データフレーム90のID部93としては、あらかじめ車輪側メモリ11f〜14fのROMに記憶された自己の識別符号を用いる。そしてステップ140の後、送信プログラム100の1回分の実行が終了する。
このような車輪側制御部11e〜14eの処理によってセンサ部11a〜14aが送信する信号の波形図の例を、図7および図8に示す。図7は、検出したタイヤ内空気圧およびタイヤ内温度がそれぞれ200キロパスカルおよび20℃である場合についてのデータフレーム90を表す信号波形である。この場合、上記の算出式の例に従えば、通信速度は4kbpsとなるので、ビット幅は250マイクロ秒となる。また、デューティー比が50%となるので、“0”のビット値を示す信号において、そのビットに相当する期間の最初から、信号レベルが変化するまでの時間が125マイクロ秒となり、その信号レベルが変化してからそのビットに相当する期間の終わりまでの時間が同じく125マイクロ秒となる。また、データフレーム90の1回の送信に係る時間が11.5ミリ秒となるので、送信回数は1回となる。
また図8は、検出したタイヤ内空気圧およびタイヤ内温度がそれぞれ100キロパスカルおよび50℃である場合についてのデータフレーム90を表す信号波形である。この場合、上記の算出式の例に従えば、通信速度は4.5kbpsとなるので、ビット幅は222マイクロ秒となる。また、デューティー比が60%となるので、“0”のビット値を示す信号において、そのビットに相当する期間の最初から、信号レベルが変化するまでの時間が約133マイクロ秒となり、その信号レベルが変化してからそのビットに相当する期間の終わりまでの時間が約89マイクロ秒となる。また、データフレーム90の1回の送信に係る時間が10.2ミリ秒となるので、送信回数は2回となる。
次に、このようにして車輪側無線送信装置11〜14から送信された信号を受信する車体側無線受信モジュール21〜24から、このデータフレーム90を受ける制御装置30が実行する受信プログラム200を、図9に示す。
制御装置30は、ほぼ間断なくこの受信プログラム200を繰り返し実行するようになっており、その実行においては、まずステップ210で、新たに車輪側無線送信装置11〜14からデータフレーム90を受信したか、すなわち、前回ステップ210を実行した後に車体側無線受信モジュール21〜24のいずれかからデータフレーム90を受けているか否かを判定し、受けていれば続いてステップ220を実行し、受けていなければ受信プログラム200の実行を終了する。
ステップ220では、受けたデータフレーム90のビット幅を測定する。具体的には、受けたデータフレーム90の信号のうち、オンまたはオフの持続時間のうち最も長い値、すなわちビット値“1”を示す信号の持続時間を、ビット幅として特定する。なお、以下では、この特定したビット幅でデータフレーム90が構成されているものとして、データフレーム90の各部91〜95の値を特定する。
続いてステップ230では、データフレーム90の通信速度を、このビット幅の逆数を算出することで特定する。
続いてステップ235では、受けたデータフレーム90のデューティー比を測定する。具体的には、受けたデータフレーム90の信号のうち、中間期間における信号レベルの切り替わり位置から、その直前の信号レベルの切り替わり位置までの時間を測定し、その測定値を上述のビット幅で除算し、その結果を当該データフレーム90についてのデューティー比とする。
続いてステップ240では、受けたデータフレーム90の誤り検出部94の内容に基づいて、データフレーム90が正常であるか否かを判定し、正常であれば続いてステップ250を実行し、正常でなければ受信プログラム200の実行を終了する。
ステップ250では、受けたデータフレーム90のID部93の内容に基づいて、受信したデータフレーム90が自車両の有する車輪についてのものであるか否かを判定する。これは、制御装置30の記憶媒体に登録されているIDのうちいずれか1つに、当該ID部93の内容と一致するものがあるか否かで判定する。なお、制御装置30の記憶媒体へのIDの登録については、例えば、車体への車輪装着時に、ユーザインターフェース60に対してユーザが車輪装着の旨の操作を行うことで、制御装置30が、その直後に受信したIDを記憶媒体に登録するようになっていればよい。受信したデータフレーム90が自車両の有する車輪についてのものであれば続いてステップ260を実行し、そうでなければ受信プログラム200の実行を終了する。
ステップ260では、ステップ230で特定した通信速度に基づいて、当該データフレーム90によって伝えられたタイヤ内空気圧の値を算出する。この算出は、上述の数1を、タイヤ内空気圧について解いた数式を用いて行う。これによって、車輪側無線送信装置11〜14において検出されたタイヤ内空気圧についてのデータフレーム90の形式から、当該タイヤ内空気圧の値が再現される。
続いてステップ265では、ステップ235で特定したデューティー比に基づいて、当該データフレーム90によって伝えられたタイヤ内温度の値を算出する。この算出は、上述の数2を、タイヤ内温度について解いた数式を用いて行う。これによって、車輪側無線送信装置11〜14において検出されたタイヤ内温度についてのデータフレーム90の形式から、当該タイヤ内温度の値が再現される。
続いてステップ270では、ステップ260および270で特定した車輪の物理状態、すなわちタイヤ内空気圧およびタイヤ内温度のデータを、制御装置30の記憶媒体(具体的にはRAM)に記憶させ、その後受信プログラム200の1回分の実行を終了する。
このようにして制御装置30の記憶媒体に記憶された車輪の物理状態のデータは、制御装置30による図示しない他のプログラムの実行により、その物理状態をユーザインターフェース60に表示させるようになっていてもよい。また、制御装置30は、図示しない他のプログラムの実行により、記憶媒体に記憶させたタイヤ内空気圧が異常なほど低い、タイヤ内温度が異常なほど高い等、車輪の物理状態に基づいて異常であると判定した場合に、警告マークをユーザインターフェース60に表示させるようになっていてもよい。
以上のような車輪側無線送信装置11〜14、車体側無線受信モジュール21〜24、制御装置30等の作動により、本実施形態における通信システムにおいて、車輪側無線送信装置11〜14は、センサ部11a〜14aを用いて車輪の物理状態としてタイヤ内空気圧およびタイヤ内温度を検出し、また送信回路11c〜14cを用いて、検出したタイヤ内空気圧に基づいた通信速度で、検出したタイヤ内温度に基づいたデューティー比のデータフレーム90を無線送信する。そして、車体側無線受信モジュール21〜24は、その送信されたデータフレーム90を受信し、制御装置30は、車体側無線受信モジュール21〜24が受信したデータの通信速度およびデューティー比を特定し、その特定した通信速度に基づいて、タイヤ内空気圧のデータを記憶媒体に記憶させ、またその特定したデューティー比に基づいて、タイヤ内温度のデータを記憶媒体に記憶させる。
このようになっているので、通信システムにおいて、車輪側無線送信装置11〜14は、検出したタイヤ内空気圧に基づいた通信速度で、タイヤ内温度に基づいたデューティー比のデータを無線送信し、車体側無線受信装置は、その無線送信されたデータの通信速度に基づいて、タイヤ内空気圧およびタイヤ内温度のデータを記憶媒体に記憶させるので、送受信されるデータの通信速度の大小およびデューティー比によって物理状態が車輪側から車体側に伝わる。このように、データの通信速度およびデューティー比という、送受信されるデータの内容そのものではない要素によって物理状態が伝わるので、その分送受信されるデータの長さが低減される。
また、タイヤ内空気圧と通信速度との関係は、数1に示した通り、タイヤ内空気圧が低いほど、通信速度が高い。したがって、通信速度が速くなり、タイヤ内空気圧が低いほど、すなわちタイヤ異常である可能性が高いほど、このタイヤ内空気圧の情報を迅速に車両側に伝えることができるので、車両の安全確保の面で都合がよい。
また、送信プログラム100のステップ130で示した通り、車輪側無線送信装置11〜14は、通信速度が高いほど多い繰り返し回数で、同じ物理状態についてのデータフレーム90を送信するようになっている。したがって、タイヤ内空気圧が低いほど、すなわちタイヤ異常である可能性が高いほど、このタイヤ内空気圧の情報が伝えられる回数が多くなり、その情報伝達の冗長度が増し、情報がより正確に伝わるようになる。
(第2実施形態)
次に、本発明の第2実施形態について、第1実施形態と異なる部分についてのみ説明する。本実施形態においては、センサ部11a〜14aは、タイヤ内空気圧、タイヤ内温度に加え、タイヤの接地圧力を検出するようになっている。接地圧力とは、タイヤと地面との境界における圧力をいう。このため、センサ部11a〜14aは、タイヤの表面部分に圧力センサを有しており、その圧力センサから受けた信号に基づいて、時間的に極大となる圧力を、当該タイヤの接地圧力として特定する。
(第2実施形態)
次に、本発明の第2実施形態について、第1実施形態と異なる部分についてのみ説明する。本実施形態においては、センサ部11a〜14aは、タイヤ内空気圧、タイヤ内温度に加え、タイヤの接地圧力を検出するようになっている。接地圧力とは、タイヤと地面との境界における圧力をいう。このため、センサ部11a〜14aは、タイヤの表面部分に圧力センサを有しており、その圧力センサから受けた信号に基づいて、時間的に極大となる圧力を、当該タイヤの接地圧力として特定する。
そして車輪側制御部11e〜14eは、タイヤ内空気圧およびタイヤ内温度を制御装置30に伝えるためのデータフレームとは別のデータフレームを用いて、接地圧力を制御装置30に伝えるようになっている。
具体的には、車輪側制御部11e〜14eは、送信プログラム100の繰り返し実行において、ある実行回にはタイヤ内空気圧に基づく通信速度およびタイヤ内温度に基づくデューティー比でデータフレームを送信し、またある実行回には接地圧力に基づく通信速度でデータフレームを送信する。どの実行回にどの物理状態を送信するかは、それらの物理量に変動がある度に、その物理量を伝えるために送信プログラム100を実行するようになっていてもよいし、ある回にはタイヤ内空気圧およびタイヤ内温度、次の回には接地圧力という風に、交互に送信する物理状態の種類を切り替えるようになっていてもよい。
なお、接地圧力を伝える場合は、接地圧力に基づくデューティー比でデータフレームを送信するようになっていてもよい。また、接地圧力を伝える場合は、同じデータフレームでタイヤ内空気圧またはタイヤ内温度を伝えるようになっていてもよい。例えば、接地圧力を伝える場合は、接地圧力に基づく通信速度およびタイヤ内温度に基づくデューティー比でデータフレームを送信するようになっていてもよい。
また、図10に示す通り、本実施形態においては、車輪側制御部11e〜14eが無線送信のためにセンサ部11a〜14aに送信するデータフレーム90’は、第1実施形態のデータフレーム90の各部分に加え、1ビット長の切替ビット部96を有している。
そして、車輪側制御部11e〜14eは、タイヤ内空気圧およびタイヤ内温度を伝えるためのデータフレーム90’中の切替ビット部96のビット値を“1”とし、接地圧力を伝えるためのデータフレーム90’中の切替ビット部96のビット値を“0”とすることで、送信されたデータフレーム90’がどの物理状態を伝えるためのものであるかを受信側に区別させるようにする。
また、制御装置30は、受信プログラム200の実行においては、車体側無線受信モジュール21〜24が受信したデータフレーム90’中の切替ビット部96に基づいて、それがどの物理状態を伝えるためのものであるかを特定し、その特定した物理状態を、受けたデータフレーム90’の通信速度およびデューティー比のうち少なくとも1つに基づいて算出し、それを記憶媒体に記憶させる。
このようになっているので、この通信システムは、通信速度およびデューティー比を調整し、切替ビット部の値を切り替えることで、3種類以上の物理状態を車両側の車体側無線受信モジュール21〜24および制御装置30に伝えることができる。
(第3実施形態)
次に、本発明の第3実施形態について、第1実施形態と異なる部分についてのみ説明する。本実施形態においては、センサ部11a〜14aは、タイヤ内空気圧、タイヤ内温度に加え、タイヤの接地圧力を検出するようになっている。このため、センサ部11a〜14aは、タイヤの表面部分に圧力センサを有しており、その圧力センサから受けた信号に基づいて、時間的に極大となる圧力を、当該タイヤの接地圧力として特定する。
(第3実施形態)
次に、本発明の第3実施形態について、第1実施形態と異なる部分についてのみ説明する。本実施形態においては、センサ部11a〜14aは、タイヤ内空気圧、タイヤ内温度に加え、タイヤの接地圧力を検出するようになっている。このため、センサ部11a〜14aは、タイヤの表面部分に圧力センサを有しており、その圧力センサから受けた信号に基づいて、時間的に極大となる圧力を、当該タイヤの接地圧力として特定する。
そして車輪側制御部11e〜14eは、タイヤ内空気圧およびタイヤ内温度を制御装置30に伝えるためのデータフレーム90とは別のデータフレーム90を用いて、接地圧力を制御装置30に伝えるようになっている。
具体的には、車輪側制御部11e〜14eは、送信プログラム100の繰り返し実行において、ある実行回にはタイヤ内空気圧に基づく通信速度およびタイヤ内温度に基づくデューティー比でデータフレーム90を送信し、またある実行回には接地圧力に基づく通信速度でデータフレーム90を送信する。どの実行回にどの物理状態を送信するかは、それらの物理量に変動がある度に、その物理量を伝えるために送信プログラム100を実行するようになっていてもよいし、ある回にはタイヤ内空気圧およびタイヤ内温度、次の回には接地圧力という風に、交互に送信する物理状態の種類を切り替えるようになっていてもよい。
また、車輪側制御部11e〜14eは、異なる物理状態を伝える場合には、データフレーム90のビットフォーマットも異なるものを用いる。具体的には、車輪側制御部11e〜14eは、タイヤ内空気圧およびタイヤ内温度を伝える場合のデータフレーム90については、ディファレンシャルバイフェイズ符号を用いて信号化し、接地圧力を伝える場合のデータフレーム90については、マンチェスター符号を用いて信号化する。
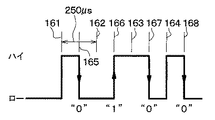
図11に、マンチェスター符号における、ハイ・ロー信号と、ビットの1、0の値との対応関係を示すための波形図を示す。この図に示す通り、マンチェスター符号においては、信号の各ビットの中間期間において、信号レベルがハイからローへ、またはローからハイへ変化するようになっている。具体的には、“0”のビット値を示す信号は、そのビットに相当する期間の最初の位置(位置161、163、164に相当する)において信号レベルがハイであり、当該中間期間(位置165、167、168に相当する)において信号レベルがローに落ち、それがそのビットに相当する期間の終端の位置(位置162、164に相当する)まで持続する。また、“1”のビット値を示す信号は、そのビットに相当する期間の最初の位置(位置162に相当する)において信号レベルがローであり、当該中間期間(位置166に相当する)において信号レベルがハイに上がり、それがそのビットに相当する期間の終端の位置(位置163に相当する)まで持続する。
このように、マンチェスター符号においては、各ビットの期間の中間位置で必ず信号レベルの切り替わりがあるので、制御装置30において、この方式の信号を受けたときに、そのビット幅を測定するためには、ディファレンシャルバイフェイズ符号と同様に、同じレベルが持続する最も長い値を、ビット幅として特定することができる。
また、データフレーム90をマンチェスター符号を用いて信号化する場合は、そのデータフレーム90のデューティー比としては、あるビットに相当する期間の最初から、信号レベルが変化するまでの時間を、そのビットのビット幅で除算した値を、単にデューティー比と呼ぶ。
また、車輪側制御部11e〜14eは、送信するデータフレーム90の同期部92の信号波形としては、ハイ信号が2ビット幅分続いた後に、“1”を示す信号が2つ続くような波形のものとする。このような同期部92を有するデータフレーム90を送信することで、送信されたデータフレーム90がどのビットフォーマットによるものであるか、すなわちどの物理状態を伝えるためのものであるかを受信側に区別させるようにする。
また、制御装置30は、受信プログラム200の実行においては、車体側無線受信モジュール21〜24が受信したデータフレーム90中の所定の位置にある同期部92において、2ビット分のハイ信号の後にどのようなレベルの信号が続くかに基づいて、それがどのビットフォーマットによるデータフレーム90であるか、すなわちどの物理状態を伝えるためのものであるかを特定し、その特定した物理状態を、受けたデータフレーム90の通信速度およびデューティー比のうち少なくとも1つに基づいて算出し、それを記憶媒体に記憶させる。
なおこのとき、制御装置30は、受けたデータフレーム90の同期部92において、何ビット分ハイ信号が続いているかについては、ビット幅の取りうる範囲(例えば200マイクロ秒から333マイクロ秒まで)に基づいて、そのハイ信号の持続時間が2ビット分であるか3ビット分であるかを検出するようになっていてもよいし、あらかじめ、受けたデータフレーム90のビット幅を、同期部92以外の部分、例えばデータフレーム90の後半部分の信号を用いて特定するようになっていてもよい。
以上のようになっているので、この通信システムは、通信速度およびデューティー比を調整し、ビットフォーマットを切り替えることで、3種類以上の物理状態を車両側の車体側無線受信モジュール21〜24および制御装置30に伝えることができる。
なお、上記の各実施形態において、車体側無線受信モジュール21〜24および制御装置30が車体側無線受信装置に相当し、センサ部11a〜14aが検出手段に相当する。また、送信回路11c〜14cが送信手段に相当し、車体側無線受信モジュール21〜24が受信手段に相当する。
また、制御装置30が、受信プログラム200のステップ220〜265を実行することで、特定手段として機能し、また、ステップ270を実行することで、記憶制御手段として機能する。
また、タイヤ内空気圧が第1種類の物理状態に相当し、タイヤ内温度が第2種類の物理状態に相当し、接地圧力が第3種類の物理状態に相当する。
(他の実施形態)
なお、上記の各実施形態においては、車輪側無線送信装置11〜14が検出する物理状態としては、タイヤ内空気圧、タイヤ内温度、接地圧力等が例示されているが、車輪の物理状態であれば、タイヤ摩耗度、走行距離、タイヤ位置等、どのようなものであってもよい。
(他の実施形態)
なお、上記の各実施形態においては、車輪側無線送信装置11〜14が検出する物理状態としては、タイヤ内空気圧、タイヤ内温度、接地圧力等が例示されているが、車輪の物理状態であれば、タイヤ摩耗度、走行距離、タイヤ位置等、どのようなものであってもよい。
また、上記の各実施形態においては、車輪側無線送信装置11〜14は、無線送信の通信速度およびデューティー比を調整することで、複数種類の物理状態を伝えるようになっているが、通信速度およびデューティー比のいずれか一方のみを調整することで、単一の種類の物理状態を伝えるようになっていてもよい。
また、上記の各実施形態においては、ビットフォーマットとしてディファレンシャルバイフェイズ符号、およびマンチェスター符号を用いているが、必ずしもこれらのビットフォーマットを使用しなければならないわけではない。通信速度を調整して物理状態を伝えるためには、送信の度に変動するビット幅を、車体側でその受信の度に検出できるようになっていればよい。例えば、各ビットに切り替わるときに信号レベルが変動するようなビットフォーマットや、最も長く同じレベルが持続する時間とビット幅との比が一定であるようなビットフォーマットであれば、どのようなものであってもよい。また、デューティー比を調整して物理状態を伝えるためには、送信のために変動するデューティー比を、車体側でその受信の度に検出できるようになっていればよい。例えば、各ビットに切り替わるときに信号レベルが変動するようなビットフォーマットや、最も長く同じレベルが持続する時間とビット幅との比が一定であるようなビットフォーマットであれば、どのようなものであってもよい。
1〜4…車輪、11〜14…車輪側無線送信装置、11a〜14a…センサ部、
11b〜14b…送信アンテナ、11c〜14c…送信回路、
11d〜14d…電池、11e〜14e…車輪側制御部、
11f〜14f…車輪側メモリ、21〜24…車体側無線受信モジュール、
30…制御装置、40…メータECU、50…車体側メモリ、
60…ユーザインターフェース、70…ホイールハウス、80…信号線、
90、90’…データフレーム、91…スタートビット部、92…同期部、
93…ID部、94…誤り検出部、95…ストップビット部、96…切替ビット部、
100…送信プログラム、200…受信プログラム。
11b〜14b…送信アンテナ、11c〜14c…送信回路、
11d〜14d…電池、11e〜14e…車輪側制御部、
11f〜14f…車輪側メモリ、21〜24…車体側無線受信モジュール、
30…制御装置、40…メータECU、50…車体側メモリ、
60…ユーザインターフェース、70…ホイールハウス、80…信号線、
90、90’…データフレーム、91…スタートビット部、92…同期部、
93…ID部、94…誤り検出部、95…ストップビット部、96…切替ビット部、
100…送信プログラム、200…受信プログラム。
Claims (16)
- 車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、
前記車輪側無線送信装置は、前記車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいた通信速度でデータを無線送信する送信手段と、を有し、
前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータの通信速度を特定する特定手段と、前記特定手段が特定した通信速度に基づいて、前記車輪の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システム。 - 前記物理状態は、前記車輪が有するタイヤ内空気圧であり、
前記送信手段は、前記検出手段が検出した前記タイヤ内空気圧が低いほど高い通信速度でデータを無線送信することを特徴とする請求項1に記載の通信システム。 - 前記送信手段は、通信速度が高いほど多い繰り返し回数で、同じ物理状態についてのデータ送信を繰り返すことを特徴とする請求項1または2に記載の通信システム。
- 車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、
前記車輪側無線送信装置は、前記車輪の物理状態を検出する検出手段と、前記検出手段が検出した前記車輪の物理状態に基づいたデューティー比でデータを無線送信する送信手段と、を有し、
前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータのデューティー比を特定する特定手段と、前記特定手段が特定したデューティー比に基づいて、前記車輪の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システム。 - 前記検出手段は、前記車輪の複数種類の物理状態を検出し、
前記送信手段は、前記複数種類のデータのそれぞれの種類についての送信を別々のデータで行い、送信するデータに係る物理状態の種類に基づいたビットフォーマットで、当該データを無線送信することを特徴とする請求項1ないし4のいずれか1つに記載の通信システム。 - 前記検出手段は、前記車輪の複数種の物理状態を検出し、
前記送信手段は、前記複数種類のデータのそれぞれの種類についての送信を別々のデータで行い、送信するデータに係る物理状態の種類に基づいた切替ビット値を当該データに含めて無線送信することを特徴とする請求項1ないし4のいずれか1つに記載の通信システム。 - 車輪に取り付けられた車輪側無線送信装置と、車体に取り付けられた車体側無線送信装置と、を備えた通信システムであって、
前記車輪側無線送信装置は、前記車輪の第1種類の物理状態および第2種類の物理状態を検出する検出手段と、前記検出手段が検出した前記第1種類の物理状態に基づいた通信速度、および前記検出手段が検出した前記第2種類の物理状態に基づいたデューティー比で、データを無線送信する送信手段と、を有し、
前記車体側無線送信装置は、前記送信手段が無線送信したデータを受信する受信手段と、前記受信手段が受信したデータの通信速度およびデューティー比を特定する特定手段と、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させる記憶制御手段と、を備えたことを特徴とする通信システム。 - 前記第1種類の物理状態は、前記車輪が有するタイヤ内空気圧であり、
前記送信手段は、前記検出手段が検出した前記タイヤ内空気圧が低いほど高い通信速度でデータを無線送信することを特徴とする請求項7に記載の通信システム。 - 前記送信手段は、通信速度が高いほど多い繰り返し回数で、同じ前記第1種類および前記第2種類の物理状態についてのデータ送信を繰り返すことを特徴とする請求項7または8に記載の通信システム。
- 前記検出手段は、第3種類の物理状態を検出し、
前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態とは別のデータで、前記第1種類および第2種類の物理状態と異なるビットフォーマットで、前記検出手段が検出した前記第3種類の物理状態に基づいた通信速度で、当該データを無線送信し、
前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、およびビットフォーマットを特定し、
前記記憶制御手段は、前記特定手段が特定した通信速度およびビットフォーマットに基づいて、前記第1種類または第3種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させることを特徴とする請求項7ないし9のいずれか1つに記載の通信システム。 - 前記検出手段は、第3種類の物理状態を検出し、
前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態とは別のデータで、前記第種類1および第2種類の物理状態と異なるビットフォーマットで、前記検出手段が検出した前記第3種類の物理状態に基づいたデューティー比で、当該データを無線送信し、
前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、およびビットフォーマットを特定し、
前記記憶制御手段は、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したビットフォーマットおよびデューティー比に基づいて、前記第2種類または第3種類の物理状態のデータを記憶媒体に記憶させることを特徴とする請求項7ないし9のいずれか1つに記載の通信システム。 - 前記検出手段は、第3種類の物理状態を検出し、
前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態についての送信とは別のデータで、前記第1種類および第2種類の物理状態についての送信と異なる切替ビット値を当該データに含めて、前記検出手段が検出した前記第3種類の物理状態に基づいた通信速度で、無線送信し、
前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、および前記切替ビット値を特定し、
前記記憶制御手段は、前記特定手段が特定した通信速度および前記切替ビット値に基づいて、前記第1種類または第3種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定したデューティー比に基づいて、前記第2種類の物理状態のデータを記憶媒体に記憶させることを特徴とする請求項7ないし9のいずれか1つに記載の通信システム。 - 前記検出手段は、第3種類の物理状態を検出し、
前記送信手段は、前記第3種類の物理状態についての送信を、前記第1種類および第2種類の物理状態についての送信とは別のデータで、前記第1種類および第2種類の物理状態についての送信と異なる切替ビット値を当該データに含めて、前記検出手段が検出した前記第3種類の物理状態に基づいたデューティー比で、無線送信し、
前記特定手段は、前記受信手段が受信したデータの通信速度、デューティー比、および前記切替ビット値を特定し、
前記記憶制御手段は、前記特定手段が特定した通信速度に基づいて、前記第1種類の物理状態のデータを記憶媒体に記憶させ、また特定手段が特定した前記切替ビット値およびデューティー比に基づいて、前記第2種類または第3種類の物理状態のデータを記憶媒体に記憶させることを特徴とする請求項7ないし9のいずれか1つに記載の通信システム。 - 車輪に取り付けられるものであって、
車輪の物理状態を検出する検出手段と、
前記検出手段が検出した前記車輪の物理状態に基づいた通信速度でデータを無線送信する送信手段と、を備えた車輪側無線送信装置。 - 車輪に取り付けられるものであって、
車輪の物理状態を検出する検出手段と、
前記検出手段が検出した前記車輪の物理状態に基づいたデューティー比のデータを無線送信する送信手段と、を備えた車輪側無線送信装置。 - 車輪に取り付けられるものであって、
前記車輪の第1種類の物理状態および第2種類の物理状態を検出する検出手段と、前記検出手段が検出した前記第1種類の物理状態に基づいた通信速度、および前記検出手段が検出した前記第2種類の物理状態に基づいたデューティー比で、データを無線送信する送信手段と、を備えた車輪側無線送信装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004308185A JP2006117143A (ja) | 2004-10-22 | 2004-10-22 | 通信システムおよび車輪側無線送信装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004308185A JP2006117143A (ja) | 2004-10-22 | 2004-10-22 | 通信システムおよび車輪側無線送信装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006117143A true JP2006117143A (ja) | 2006-05-11 |
Family
ID=36535445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004308185A Withdrawn JP2006117143A (ja) | 2004-10-22 | 2004-10-22 | 通信システムおよび車輪側無線送信装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006117143A (ja) |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010507340A (ja) * | 2006-10-20 | 2010-03-04 | シュレイダー エレクトロニクス リミテッド | Rfデータリンクにおけるデータエラー検出及び修正方法 |
| CN107600074A (zh) * | 2017-07-14 | 2018-01-19 | 北汽福田汽车股份有限公司 | 车速测量方法和装置 |
| JP2021509303A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 優先的なデータ伝送能力を有する外科用システム |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11696760B2 (en) | 2017-12-28 | 2023-07-11 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US11696778B2 (en) | 2017-10-30 | 2023-07-11 | Cilag Gmbh International | Surgical dissectors configured to apply mechanical and electrical energy |
| US11701139B2 (en) | 2018-03-08 | 2023-07-18 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11701185B2 (en) | 2017-12-28 | 2023-07-18 | Cilag Gmbh International | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11737668B2 (en) | 2017-12-28 | 2023-08-29 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11751958B2 (en) | 2017-12-28 | 2023-09-12 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11775682B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11771487B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Mechanisms for controlling different electromechanical systems of an electrosurgical instrument |
| US11779337B2 (en) | 2017-12-28 | 2023-10-10 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11839396B2 (en) | 2018-03-08 | 2023-12-12 | Cilag Gmbh International | Fine dissection mode for tissue classification |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US11890065B2 (en) | 2017-12-28 | 2024-02-06 | Cilag Gmbh International | Surgical system to limit displacement |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11903587B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Adjustment to the surgical stapling control based on situational awareness |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11925350B2 (en) | 2019-02-19 | 2024-03-12 | Cilag Gmbh International | Method for providing an authentication lockout in a surgical stapler with a replaceable cartridge |
| US11931027B2 (en) | 2018-03-28 | 2024-03-19 | Cilag Gmbh Interntional | Surgical instrument comprising an adaptive control system |
| US11969142B2 (en) | 2018-12-04 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
-
2004
- 2004-10-22 JP JP2004308185A patent/JP2006117143A/ja not_active Withdrawn
Cited By (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010507340A (ja) * | 2006-10-20 | 2010-03-04 | シュレイダー エレクトロニクス リミテッド | Rfデータリンクにおけるデータエラー検出及び修正方法 |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| CN107600074A (zh) * | 2017-07-14 | 2018-01-19 | 北汽福田汽车股份有限公司 | 车速测量方法和装置 |
| US11925373B2 (en) | 2017-10-30 | 2024-03-12 | Cilag Gmbh International | Surgical suturing instrument comprising a non-circular needle |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11696778B2 (en) | 2017-10-30 | 2023-07-11 | Cilag Gmbh International | Surgical dissectors configured to apply mechanical and electrical energy |
| US11819231B2 (en) | 2017-10-30 | 2023-11-21 | Cilag Gmbh International | Adaptive control programs for a surgical system comprising more than one type of cartridge |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11793537B2 (en) | 2017-10-30 | 2023-10-24 | Cilag Gmbh International | Surgical instrument comprising an adaptive electrical system |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| JP7346423B2 (ja) | 2017-12-28 | 2023-09-19 | エシコン エルエルシー | 優先的なデータ伝送能力を有する外科用システム |
| US11775682B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11771487B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Mechanisms for controlling different electromechanical systems of an electrosurgical instrument |
| US11779337B2 (en) | 2017-12-28 | 2023-10-10 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11737668B2 (en) | 2017-12-28 | 2023-08-29 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11701185B2 (en) | 2017-12-28 | 2023-07-18 | Cilag Gmbh International | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| JP2021509303A (ja) * | 2017-12-28 | 2021-03-25 | エシコン エルエルシーEthicon LLC | 優先的なデータ伝送能力を有する外科用システム |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11918302B2 (en) | 2017-12-28 | 2024-03-05 | Cilag Gmbh International | Sterile field interactive control displays |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11751958B2 (en) | 2017-12-28 | 2023-09-12 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11864845B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Sterile field interactive control displays |
| US11696760B2 (en) | 2017-12-28 | 2023-07-11 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US11890065B2 (en) | 2017-12-28 | 2024-02-06 | Cilag Gmbh International | Surgical system to limit displacement |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11903587B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Adjustment to the surgical stapling control based on situational awareness |
| US11844545B2 (en) | 2018-03-08 | 2023-12-19 | Cilag Gmbh International | Calcified vessel identification |
| US11839396B2 (en) | 2018-03-08 | 2023-12-12 | Cilag Gmbh International | Fine dissection mode for tissue classification |
| US11701139B2 (en) | 2018-03-08 | 2023-07-18 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11931027B2 (en) | 2018-03-28 | 2024-03-19 | Cilag Gmbh Interntional | Surgical instrument comprising an adaptive control system |
| US11969216B2 (en) | 2018-11-06 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US11969142B2 (en) | 2018-12-04 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US11925350B2 (en) | 2019-02-19 | 2024-03-12 | Cilag Gmbh International | Method for providing an authentication lockout in a surgical stapler with a replaceable cartridge |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006117143A (ja) | 通信システムおよび車輪側無線送信装置 | |
| JP4569570B2 (ja) | 車輪情報取得システム | |
| US7511608B2 (en) | Tire pressure monitoring system telegram with suppressed ID | |
| US7791460B2 (en) | Tire pressure monitoring system with reliable wireless communication between wheel-based transceivers and vehicle body-based transceiver | |
| CN104709011A (zh) | 使用rssi和多普勒签名的tpms | |
| EP3293019B1 (en) | Tire state detecting device | |
| US7750798B2 (en) | Wheel position detecting device that verifies accuracy of detection using trigger signal reception strength and tire air pressure detecting device including the same | |
| JP2008273477A (ja) | 車両用センサシステム | |
| JP2016094036A (ja) | トリガモジュール | |
| JP6380061B2 (ja) | 車載報知装置及び報知システム | |
| US20190135054A1 (en) | Tire-pressure monitoring system and monitoring device | |
| US8026803B2 (en) | Apparatus and process for monitoring a vehicle condition | |
| EP1270276B1 (en) | Tire condition monitoring apparatus | |
| JP2005157416A (ja) | タイヤ位置検出装置 | |
| JP2003182325A (ja) | タイヤ状態監視装置 | |
| JP2005153722A (ja) | タイヤ空気圧検出装置 | |
| JP2006273077A (ja) | 車輪装着位置判定装置、車輪位置情報設定装置、および車輪情報取得装置 | |
| JP2006062533A (ja) | タイヤ状態監視システム | |
| JP2012233846A (ja) | タイヤ空気圧監視システムの受信機 | |
| JP2006044566A (ja) | タイヤ空気圧監視システム | |
| JP2005145113A (ja) | タイヤ位置検出装置 | |
| US20130257610A1 (en) | Apparatus for monitoring tire conditions and method thereof | |
| JP2003272060A (ja) | タイヤ状態監視装置 | |
| JP2013123997A (ja) | 車輪位置判定装置 | |
| JP2012224230A (ja) | タイヤ位置判定システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061127 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20081027 |