JP2005526257A - 無線信号の到着時刻誤差の検出及び補償のためのシステム及び方法 - Google Patents
無線信号の到着時刻誤差の検出及び補償のためのシステム及び方法 Download PDFInfo
- Publication number
- JP2005526257A JP2005526257A JP2004506204A JP2004506204A JP2005526257A JP 2005526257 A JP2005526257 A JP 2005526257A JP 2004506204 A JP2004506204 A JP 2004506204A JP 2004506204 A JP2004506204 A JP 2004506204A JP 2005526257 A JP2005526257 A JP 2005526257A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- level
- time
- mathematical model
- pulse width
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 25
- 238000001514 detection method Methods 0.000 title 1
- 238000005316 response function Methods 0.000 claims abstract description 18
- 238000012937 correction Methods 0.000 claims abstract description 16
- 238000013178 mathematical model Methods 0.000 claims description 30
- 238000004458 analytical method Methods 0.000 claims description 7
- 238000007620 mathematical function Methods 0.000 claims description 6
- 230000000694 effects Effects 0.000 abstract description 31
- 238000005259 measurement Methods 0.000 abstract description 11
- 238000004364 calculation method Methods 0.000 abstract description 9
- 230000002596 correlated effect Effects 0.000 abstract 1
- 238000004891 communication Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 230000000717 retained effect Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000001413 cellular effect Effects 0.000 description 3
- 238000012887 quadratic function Methods 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 238000010219 correlation analysis Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/69—Spread spectrum techniques
- H04B1/707—Spread spectrum techniques using direct sequence modulation
- H04B1/7073—Synchronisation aspects
- H04B1/7085—Synchronisation aspects using a code tracking loop, e.g. a delay-locked loop
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/80—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves
- G01S3/802—Systems for determining direction or deviation from predetermined direction
- G01S3/808—Systems for determining direction or deviation from predetermined direction using transducers spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/22—Multipath-related issues
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/428—Determining position using multipath or indirect path propagation signals in position determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0218—Multipath in signal reception
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0273—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves using multipath or indirect path propagation signals in position determination
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/02—Amplitude-modulated carrier systems, e.g. using on-off keying; Single sideband or vestigial sideband modulation
- H04L27/06—Demodulator circuits; Receiver circuits
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/69—Spread spectrum techniques
- H04B1/707—Spread spectrum techniques using direct sequence modulation
- H04B1/7073—Synchronisation aspects
- H04B1/7075—Synchronisation aspects with code phase acquisition
- H04B1/70757—Synchronisation aspects with code phase acquisition with increased resolution, i.e. higher than half a chip
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/69—Spread spectrum techniques
- H04B1/707—Spread spectrum techniques using direct sequence modulation
- H04B1/7097—Interference-related aspects
- H04B1/711—Interference-related aspects the interference being multi-path interference
- H04B1/7115—Constructive combining of multi-path signals, i.e. RAKE receivers
- H04B1/7117—Selection, re-selection, allocation or re-allocation of paths to fingers, e.g. timing offset control of allocated fingers
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Radar Systems Or Details Thereof (AREA)
- Mobile Radio Communication Systems (AREA)
- Noise Elimination (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
Abstract
【解決手段】それによって到着時刻(TOA)の誤差の影響を低減できるシステム及び方法が示される。移動ユニットにおいて、基地局から送信された信号が検出されるときに相関パルスが生成される。送信された信号はマルチパス信号が移動ユニットに到達するように反射され回折されるだろう。このことは、正確な(TOA)測定における生成された相関パルスの歪及び誤差へと導く。本発明は応答関数をモデル化し、ピークから下ったどの点でパルス幅が計算されるかを示す動的に調節可能な係数を伴ったモデリング関数を用いてパルス幅を計算する。パルス幅の計算に基づいて、マルチパス信号のタイプが決定され適切な補正係数が測定された(TOA)に適用されてより正確な(TOA)決定を提供する。システムは移動電話ユニットにおいて基地局からの(TOA)信号へ補正係数を適用してもよいし、或いは全地球測位システム(GPS)衛星から受信された信号からのTOA)信号へ補正係数を適用してもよい。
Description
本発明は電気通信装置におけるマルチパス誤差の補正のためのシステム及び方法において具体化される。例示的な実施形態において、受信された信号を解析し時間上の予め定められた点における相関信号を決定するサーチャー(searcher)をシステムは含む。サーチャーは時間上の予め定められた点の選択された一つにおける最大信号レベルを決定する。信号解析器は選択時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルを用いて予め定められた応答関数の数学的モデルを生成する。信号解析器は予め定められた応答関数に関連した実際のピークレベルとパルス幅を決定するために数学的モデルを使用し補正された到着時刻を生成するためにパルス幅に基づいた到着時刻に補正係数を適用する。
本発明は基地送受信局(BTS)から送信された信号の到着時刻(TOA)をより正確に決定するための数学的なモデリング技術を使用する。図1は、移動ユニットの位置を決定するための進歩した順方向リンク三角法(AFLT)を用いる無線システムの動作を示す図である。図1に示されるように、移動ユニット10は複数のBTSs12−16の範囲の中にある。音声通信のような通常の通信を可能にするために、移動ユニット10はBTSs12−16のそれぞれと通信リンクを確立する。通信リンクの確立の過程で引き出された情報はTOAを推定するために使用されてよく、それによってBTSs12−16に関する移動ユニット10の位置を決定する。しかしながら、マルチパス信号は通常移動ユニット10内で生成される相関パルスの変更となり、正確なTOAの計算における起こり得る誤差を導く。マルチパス信号の存在下でのTOA測定は移動ユニット10の正確な位置を決定するには十分に正確ではない。本発明はマルチパス信号に対して補正或いは補償するより正確なTOAデータを導き、移動ユニット10の位置のより正確な決定を可能にする。
y(x)=ax2+bx+c (1)
ここでy(x)はxの関数として相関出力値(例えば、RSSI)に等しく、xはチップの値に等しく、a、b及びcは係数である。係数a、b及びcは3つのサンプル点での相関値を用いて容易に決定されるだろう。第1のサンプル点は最大の信号レベルが検出されたチップの値である。これはしばしば“定刻(on−time)”のエネルギー値と呼ばれ、数学的には上述の式(2)に関してy(0)と言及されるだろう。残りの二つの値は隣接したサンプル点での相関値である。サーチャー116が1/2チップの増加量でサーチする(searches)上述の例では、定刻の値の1/2チップ前及び定刻の値の1/2チップ後での相関値が係数a、b及びcを決定するために用いられる。これらは“早い”エネルギー値及び“遅い”エネルギー値と呼ばれて良く、上述の式(1)に関して、それぞれy(−0.5)及びy(0.5)と呼ばれる。
a=2y(0.5)+2y(−0.5)−4y(0) (2);
b=y(0.5)−y(−0.5) (3);
そして c=y(0) (4).
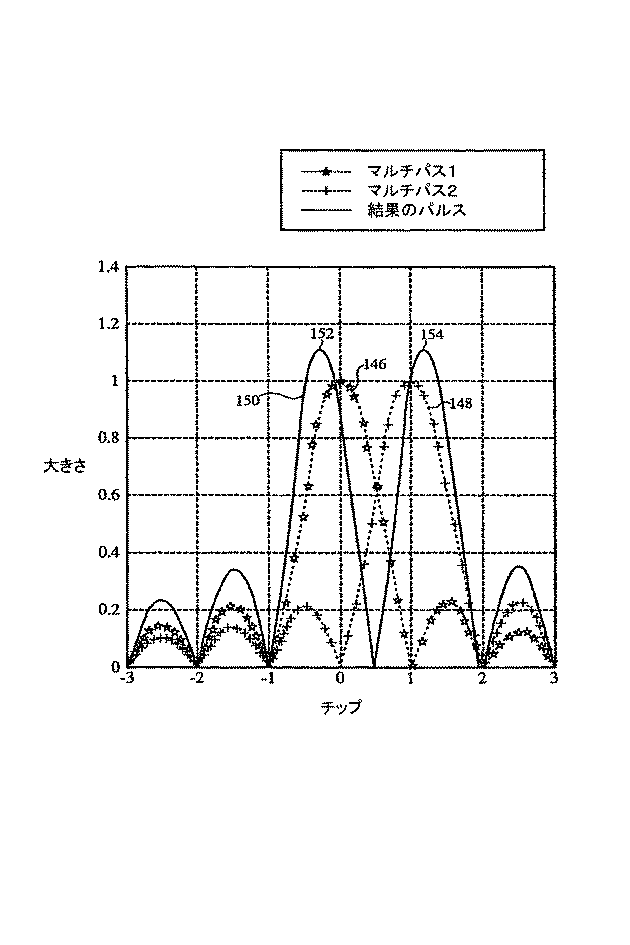
応答関数の2次式によるモデリングは実際のピーク位置の正確な決定とパルス幅の簡単な計算を可能にする。実際のピーク位置に関して、図3はサーチャー116(図2を見よ)からの応答関数が正確に0チップの位置にあるとして示す。しかしながら、当業者はサーチ116が保持されたPN符号を半チップの増加量でシフトすることを理解するだろう。それゆえサーチャーの解像度はプラス或いはマイナス1/4チップである。即ち、実際のピーク位置はサーチャー116によって決定された位置から1/4チップだけ離れているかもしれない。しかしながら、信号解析器120は係数a、b及びcを用いて実際のピーク位置を正確に決定することが出来る。ひとたび実際のピーク位置が決定されると、信号解析器は数学的モデル122を用いて実際のパルス幅を決定を行う。図6の波形は2次関数による応答関数のモデリングを示し、そこにおいて最大の相関値(例えば、RSSI)はチップ0において検出されて参照数字160で示される。早いエネルギー値(即ち、−0.5チップにおける)に対する相関値は参照数字162で示され、他方遅いエネルギー値(即ち、0.5チップにおける)に対する相関値は参照数字164で示される。点160〜164における相関値は係数a、b及びcに対する値を決定するために上述の式(2)〜(4)に代入されてよい。図5の波形を見ると、ピーク値がチップ0及び0.25の間のどこかにあることを決定することが出来る。しかしながら、簡単な数学を用いてピークの正確な位置を決定することが可能である。式(1)は単純な2次式でありその導関数は
y‘(x)=2ax+b (5).
によって表現されるだろう。
x=−b/(2a) (6).
それゆえ、ピークは係数a及びbを計算することによって直ちに決定されるだろう。
y(x)=A(x−x0)2+B (7).
また、式(7)によって表現される曲線は以下が最大点である放物線である:
Y(x0)=B (8).
これらの式から、A=aでありまたピークの位置が以下のように表現できることはすぐわかる:
B=c−b2/(4a) (9).
システム100は、放物線が最大値からδ倍減衰した点を計算することによってパルス幅が容易に決定されることを可能にする。その点は線形或いは対数空間で計算されてかまわない。値が対数空間で計算されるならば、パルス幅は最大値の下のδデシベル(dB)となる点において決定される。以下の方程式の組は線形空間での解を示す:
同位相のマルチパス信号に対して増加するチップ量を引き、位相の異なるマルチパス信号に対して追加量を加える。当業者は理解できるが、システム100によって提供されるより正確なTOA信号は移動ユニット10に対するより正確な位置決定につながる。
140…相関波形
Claims (23)
- 電気通信装置におけるマルチパス誤差の補正のためのシステムであって、以下を具備するシステム:
時間上の予め定められた点で相関信号のレベルを決定するために受信された信号を解析するためのサーチャーであって、時間上の予め定められた点の選択された一つにおいて最大信号レベルを決定するサーチャー;そして
選択された時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルを用いて予め定められた応答関数の数学的モデルを生成するための信号解析器であって、予め定められた応答関数に関連付けられた実際のピークレベル及びパルス幅を決定するために数学的モデルを使用し、補正された到着時刻を生成するためにパルス幅に基づいて到着時刻に対して補正係数を適用する信号解析器。 - 相関信号のレベルが実際のピークレベルより予め定められた量だけ少ない点でパルス幅が決定される請求項1記載のシステム。
- 信号解析器は予め定められた量を動的に選択する請求項2記載のシステム。
- 信号解析器は受信された信号の信号対雑音比に基づいて予め定められた量を選択する請求項2記載のシステム。
- 相関信号のレベルは受信された信号の受信された信号強度に基づいている請求項1記載のシステム。
- 選択された時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルは数学的モデルの係数を決定するために使用される請求項1記載のシステム。
- 数学的モデルの係数は数学的モデルのパルス幅を決定するために使用される請求項6記載のシステム。
- 数学的モデルは2次の数学的な関数である請求項1記載のシステム。
- 数学的モデルは2次より高次の数学的な関数であり、選択された時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルが数学的モデルの係数を決定するために使用される請求項1記載のシステム。
- 電気通信装置におけるマルチパス誤差の補正のためのシステムであって、以下を具備するシステム:
時間上の予め定められた点で相関信号のレベルを決定するために受信された信号を解析するための手段;
時間上の予め定められた点の選択された一つにおいて最大信号レベルを決定するための手段;そして
選択された時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルを用いて予め定められた応答関数の数学的モデルを生成するための解析手段であって、予め定められた応答関数に関連付けられた実際のピークレベル及びパルス幅を決定するために数学的モデルを使用し、補正された到着時刻を生成するためにパルス幅に基づいて到着時刻に対して補正係数を適用する解析手段。 - 解析手段は相関信号のレベルが実際のピークレベルより予め定められた量だけ少ない点でパルス幅を決定する請求項10記載のシステム。
- 解析手段は予め定められた量を動的に選択する請求項11記載のシステム。
- 解析手段は受信された信号の信号対雑音比に基づいて予め定められた量を選択する請求項11記載のシステム。
- 相関信号のレベルは受信された信号の受信された信号強度に基づいている請求項10記載のシステム。
- 解析手段は数学的モデルとして2次の数学的な関数を用いる請求項10記載のシステム。
- 解析手段は2次より高次の数学的モデルを用いる請求項10記載のシステム。
- 電気通信装置におけるマルチパス誤差の補正のための方法であって、以下を具備する方法:
時間上の予め定められた点で相関信号のレベルを決定するために受信された信号を解析すること;
時間上の予め定められた点の選択された一つにおいて最大信号レベルを決定すること;
選択された時間に隣接した時間上の予め定められた点からの最大信号レベル及び相関信号レベルを用いて予め定められた応答関数の数学的モデルを生成すること;そして
予め定められた応答関数に関連付けられた実際のピークレベル及びパルス幅を決定するために数学的モデルを使用し、補正された到着時刻を生成するためにパルス幅に基づいて到着時刻に対して補正係数を適用すること。 - パルス幅を決定することは相関信号のレベルが実際のピークレベルより予め定められた量だけ少ない点でパルス幅を決定する請求項17記載の方法。
- 予め定められた量を動的に選択することを更に具備する請求項18記載の方法。
- 受信された信号の信号対雑音比に基づいて予め定められた量を選択することを更に具備する請求項18記載の方法。
- 相関信号のレベルは受信された信号の受信された信号強度に基づいている請求項17記載の方法。
- 数学的モデルは2次の数学的な関数である請求項17記載のシステム。
- 数学的モデルは2次より高次の数学的モデルである請求項17記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/150,687 US7095813B2 (en) | 2002-05-16 | 2002-05-16 | System and method for the detection and compensation of radio signal time of arrival errors |
| PCT/US2003/015637 WO2003098829A1 (en) | 2002-05-16 | 2003-05-15 | System and method for the detection and compensation of radio signal time of arrival errors |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005526257A true JP2005526257A (ja) | 2005-09-02 |
| JP2005526257A5 JP2005526257A5 (ja) | 2006-07-13 |
Family
ID=29419310
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004506204A Pending JP2005526257A (ja) | 2002-05-16 | 2003-05-15 | 無線信号の到着時刻誤差の検出及び補償のためのシステム及び方法 |
Country Status (16)
| Country | Link |
|---|---|
| US (1) | US7095813B2 (ja) |
| EP (1) | EP1504540B1 (ja) |
| JP (1) | JP2005526257A (ja) |
| KR (1) | KR100980131B1 (ja) |
| CN (1) | CN100391118C (ja) |
| AT (1) | ATE390765T1 (ja) |
| AU (1) | AU2003233563B2 (ja) |
| BR (1) | BR0309952A (ja) |
| CA (1) | CA2486094C (ja) |
| DE (1) | DE60319976T2 (ja) |
| ES (1) | ES2302929T3 (ja) |
| HK (1) | HK1079916B (ja) |
| IL (1) | IL165073A0 (ja) |
| MX (1) | MXPA04011353A (ja) |
| RU (1) | RU2335846C2 (ja) |
| WO (1) | WO2003098829A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008219571A (ja) * | 2007-03-06 | 2008-09-18 | Mitsubishi Electric Corp | マルチパス抑制装置およびマルチパス抑制方法 |
| JP2010210633A (ja) * | 2002-08-29 | 2010-09-24 | Qualcomm Inc | 干渉マルチパス条件を検出する手続 |
| US8473205B2 (en) | 2002-10-22 | 2013-06-25 | Qualcomm Incorporated | Procedure for searching for position determination signals using a plurality of search modes |
| JP2017529720A (ja) * | 2014-07-14 | 2017-10-05 | アイポジ インコーポレイテッドIposi,Inc. | トモグラフィー損失係数の推定 |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7474994B2 (en) * | 2001-12-14 | 2009-01-06 | Qualcomm Incorporated | System and method for wireless signal time of arrival |
| US6999778B2 (en) * | 2002-07-03 | 2006-02-14 | Denso Corporation | Multipath assistance for pilot phase measurement processes |
| US7324607B2 (en) * | 2003-06-30 | 2008-01-29 | Intel Corporation | Method and apparatus for path searching |
| US7221913B2 (en) * | 2004-06-23 | 2007-05-22 | Intel Corporation | Effective time-of-arrival estimation algorithm for multipath environment |
| DE102004059980A1 (de) | 2004-12-13 | 2006-06-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mischer zum Mischen eines Signals und Verfahren zum Mischen eines Signals |
| DE102004059957A1 (de) | 2004-12-13 | 2006-06-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Synchronisationsvorrichtung und Vorrichtung zum Erzeugen eines Synchronisationssignals |
| DE102004059940A1 (de) * | 2004-12-13 | 2006-06-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Signalkonvertierer zum Konvertieren eines Startsignals in ein Endsignal und Verfahren zum Konvertieren eines Startsignals in ein Endsignal |
| DE102004059941A1 (de) | 2004-12-13 | 2006-06-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und Verfahren zum Bestimmen eines Eintreffzeitpunktes einer Empfangsfolge |
| DE102004059958B4 (de) * | 2004-12-13 | 2007-10-04 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und Verfahren zum Bestimmen eines Korrelationswertes |
| DE102004059946B4 (de) | 2004-12-13 | 2008-10-02 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und Verfahren zum Ermitteln eines Korrelationsmaximums |
| US8755258B2 (en) | 2005-02-16 | 2014-06-17 | Mitsubishi Electric Corporation | Optical disc and optical disc device |
| KR100776682B1 (ko) * | 2005-07-19 | 2007-11-16 | 한국전자통신연구원 | 초광대역 통신을 이용한 고정밀도 거리인식 장치 및 방법 |
| US8099106B2 (en) * | 2005-08-24 | 2012-01-17 | Qualcomm Incorporated | Method and apparatus for classifying user morphology for efficient use of cell phone system resources |
| JP2007107928A (ja) * | 2005-10-11 | 2007-04-26 | Seiko Epson Corp | 測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| US7489904B2 (en) * | 2005-12-13 | 2009-02-10 | Motorola, Inc. | Method and system for determining the time of arrival of a direct radio signal |
| WO2009143559A1 (en) | 2008-05-26 | 2009-12-03 | Commonwealth Scientific And Industrial Research Organisation | Measurement of time of arrival |
| CN101394672B (zh) * | 2008-10-30 | 2012-08-29 | 上海大学 | 基于多径散射信息的高精度无线定位方法及系统 |
| US8379782B2 (en) * | 2009-06-04 | 2013-02-19 | Telefonaktiebolaget L M Ericsson (Publ) | Mobile radio channel estimation |
| US20110074634A1 (en) * | 2009-09-30 | 2011-03-31 | Electronics And Telecommunications Research Institute | Wireless positioning method and apparatus |
| KR101063084B1 (ko) | 2010-03-02 | 2011-09-07 | 서울대학교산학협력단 | 계산량 감축이 가능한 초해상도 전파도달시간 추정 방법 |
| JP5685888B2 (ja) * | 2010-10-25 | 2015-03-18 | セイコーエプソン株式会社 | 受信信号信頼度判定方法、コード位相誤差算出方法及び受信信号信頼度判定装置 |
| CN102692241B (zh) * | 2012-06-11 | 2015-01-21 | 华中科技大学 | 一种无线定位系统的误差补偿方法 |
| KR102065666B1 (ko) | 2012-12-12 | 2020-02-11 | 삼성전자 주식회사 | 위성 항법 시스템의 신호 추적 방법, 신호 추적 장치 및 이를 포함하는 위성신호 수신기 |
| FR3012620A1 (fr) * | 2013-10-31 | 2015-05-01 | Thales Sa | Procede de detection d'interferences dans un signal de radio-navigation par satellite par detection d'une deformation de la fonction de correlation |
| EP3437394A4 (en) * | 2016-03-30 | 2019-04-17 | Telefonaktiebolaget LM Ericsson (PUBL) | PROCEDURE AND RECEIVING KNOWLEDGE FOR DETERMINING THE ARRIVAL TIME, TOA, FOR A RECEIVED RADIO SIGNAL |
| EP3315991A1 (en) * | 2016-10-28 | 2018-05-02 | Fraunhofer Gesellschaft zur Förderung der Angewand | Time of arrival (toa) measurements |
| US10736074B2 (en) | 2017-07-31 | 2020-08-04 | Qualcomm Incorporated | Systems and methods to facilitate location determination by beamforming of a positioning reference signal |
| GB2566731A (en) * | 2017-09-25 | 2019-03-27 | Focal Point Positioning Ltd | System for determining a physical metric such as position |
| US11777764B2 (en) | 2019-03-28 | 2023-10-03 | Qualcomm Incorporated | Sounding reference signal waveform design for wireless communications |
| US11239967B2 (en) | 2019-05-02 | 2022-02-01 | Qualcomm Incorporated | Patterns for reference signals used for positioning in a wireless communications system |
| FR3097059B1 (fr) * | 2019-06-07 | 2021-07-02 | Uwinloc | Procédé et dispositif pour l’estimation de l’instant d’arrivée d’un message |
| US11082183B2 (en) | 2019-09-16 | 2021-08-03 | Qualcomm Incorporated | Comb shift design |
| FR3103658B1 (fr) * | 2019-11-27 | 2022-09-02 | Centre Nat Etd Spatiales | Procédé de réduction des erreurs liées aux trajets multiples |
| CN111464937B (zh) * | 2020-03-23 | 2021-06-22 | 北京邮电大学 | 一种基于多径误差补偿的定位方法及装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11284601A (ja) * | 1998-02-02 | 1999-10-15 | Ricoh Co Ltd | 相関ピーク検出回路 |
| WO2001010154A1 (en) * | 1999-08-02 | 2001-02-08 | Itt Manufacturing Enterprises, Inc. | Method and apparatus for determining the position of a mobile communication device using low accuracy clocks |
| JP2002500751A (ja) * | 1996-04-25 | 2002-01-08 | シーフ、テクノロジー、インコーポレーテッド | マルチビット相関器を備えたスペクトル拡散受信機 |
| JP2006506830A (ja) * | 2001-06-11 | 2006-02-23 | クゥアルコム・インコーポレイテッド | 到着誤差の無線信号時間の検出と補償のためのシステムと方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5764686A (en) * | 1994-05-05 | 1998-06-09 | Sanconix, Inc. | Enhanced time of arrival method |
| GB9519087D0 (en) * | 1995-09-19 | 1995-11-22 | Cursor Positioning Sys Ltd | Navigation and tracking system |
| US6198765B1 (en) | 1996-04-25 | 2001-03-06 | Sirf Technologies, Inc. | Spread spectrum receiver with multi-path correction |
| US5828694A (en) | 1996-07-01 | 1998-10-27 | Trimble Navigation Limited | Determination of multipath tracking error |
| US6313786B1 (en) * | 1998-07-02 | 2001-11-06 | Snaptrack, Inc. | Method and apparatus for measurement processing of satellite positioning system (SPS) signals |
| EP1089452A1 (en) | 1999-09-28 | 2001-04-04 | Lucent Technologies Inc. | Fractional sample timing error estimation for W-CDMA |
| IL159276A0 (en) | 2001-06-11 | 2004-06-01 | Qualcomm Inc | System and method for the detection and compensation of radio signal time of arrival errors |
| US7474994B2 (en) * | 2001-12-14 | 2009-01-06 | Qualcomm Incorporated | System and method for wireless signal time of arrival |
-
2002
- 2002-05-16 US US10/150,687 patent/US7095813B2/en not_active Expired - Lifetime
-
2003
- 2003-05-15 DE DE60319976T patent/DE60319976T2/de not_active Expired - Lifetime
- 2003-05-15 BR BR0309952-0A patent/BR0309952A/pt not_active IP Right Cessation
- 2003-05-15 KR KR1020047018300A patent/KR100980131B1/ko active IP Right Grant
- 2003-05-15 WO PCT/US2003/015637 patent/WO2003098829A1/en active Application Filing
- 2003-05-15 ES ES03728999T patent/ES2302929T3/es not_active Expired - Lifetime
- 2003-05-15 JP JP2004506204A patent/JP2005526257A/ja active Pending
- 2003-05-15 CN CNB038164175A patent/CN100391118C/zh not_active Expired - Fee Related
- 2003-05-15 AU AU2003233563A patent/AU2003233563B2/en not_active Ceased
- 2003-05-15 CA CA2486094A patent/CA2486094C/en not_active Expired - Fee Related
- 2003-05-15 RU RU2004136855/09A patent/RU2335846C2/ru not_active IP Right Cessation
- 2003-05-15 AT AT03728999T patent/ATE390765T1/de not_active IP Right Cessation
- 2003-05-15 MX MXPA04011353A patent/MXPA04011353A/es active IP Right Grant
- 2003-05-15 EP EP03728999A patent/EP1504540B1/en not_active Expired - Lifetime
-
2004
- 2004-11-07 IL IL16507304A patent/IL165073A0/xx not_active IP Right Cessation
-
2005
- 2005-12-30 HK HK05112175.7A patent/HK1079916B/zh not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002500751A (ja) * | 1996-04-25 | 2002-01-08 | シーフ、テクノロジー、インコーポレーテッド | マルチビット相関器を備えたスペクトル拡散受信機 |
| JPH11284601A (ja) * | 1998-02-02 | 1999-10-15 | Ricoh Co Ltd | 相関ピーク検出回路 |
| WO2001010154A1 (en) * | 1999-08-02 | 2001-02-08 | Itt Manufacturing Enterprises, Inc. | Method and apparatus for determining the position of a mobile communication device using low accuracy clocks |
| JP2006506830A (ja) * | 2001-06-11 | 2006-02-23 | クゥアルコム・インコーポレイテッド | 到着誤差の無線信号時間の検出と補償のためのシステムと方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010210633A (ja) * | 2002-08-29 | 2010-09-24 | Qualcomm Inc | 干渉マルチパス条件を検出する手続 |
| US8473205B2 (en) | 2002-10-22 | 2013-06-25 | Qualcomm Incorporated | Procedure for searching for position determination signals using a plurality of search modes |
| JP2008219571A (ja) * | 2007-03-06 | 2008-09-18 | Mitsubishi Electric Corp | マルチパス抑制装置およびマルチパス抑制方法 |
| JP2017529720A (ja) * | 2014-07-14 | 2017-10-05 | アイポジ インコーポレイテッドIposi,Inc. | トモグラフィー損失係数の推定 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1504540A1 (en) | 2005-02-09 |
| US7095813B2 (en) | 2006-08-22 |
| KR100980131B1 (ko) | 2010-09-03 |
| KR20050005234A (ko) | 2005-01-13 |
| US20030215035A1 (en) | 2003-11-20 |
| CA2486094A1 (en) | 2003-11-27 |
| DE60319976T2 (de) | 2009-04-09 |
| EP1504540B1 (en) | 2008-03-26 |
| DE60319976D1 (de) | 2008-05-08 |
| AU2003233563A1 (en) | 2003-12-02 |
| IL165073A0 (en) | 2005-12-18 |
| ES2302929T3 (es) | 2008-08-01 |
| CN1669237A (zh) | 2005-09-14 |
| WO2003098829A1 (en) | 2003-11-27 |
| AU2003233563B2 (en) | 2008-05-01 |
| ATE390765T1 (de) | 2008-04-15 |
| RU2335846C2 (ru) | 2008-10-10 |
| BR0309952A (pt) | 2005-02-22 |
| HK1079916A1 (en) | 2006-04-13 |
| HK1079916B (zh) | 2009-02-06 |
| RU2004136855A (ru) | 2005-05-27 |
| CA2486094C (en) | 2011-02-22 |
| CN100391118C (zh) | 2008-05-28 |
| MXPA04011353A (es) | 2005-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2335846C2 (ru) | Система и способ для обнаружения и компенсации ошибок времени прибытия радиосигнала | |
| JP4025288B2 (ja) | 到着誤差の無線信号時間の検出と補償のためのシステムと方法 | |
| KR100838988B1 (ko) | 무선 신호의 도착 시간 에러를 검출 및 보상하기 위한시스템 및 방법 | |
| US6658258B1 (en) | Method and apparatus for estimating the location of a mobile terminal | |
| KR20010098736A (ko) | 통합 무선 글로벌 측위 시스템에서의 피일럿 페이즈오프셋 시간 지연 파라미터 결정 방법 및 무선 터미널위치 결정 방법 | |
| EP1428405A1 (en) | System and method for identification of transmitters with limited information | |
| AU2001271894A1 (en) | System and method for the detection and compensation of radio signal time of arrival errors | |
| EP1376150A1 (en) | Radio positioning system using interference cancellation | |
| CA2634618A1 (en) | Method and apparatus for measurement processing of satellite positioning system (sps) signals | |
| US7573423B2 (en) | Method of acquiring satellite data | |
| KR100884509B1 (ko) | 도달시간 추정 시스템 및 방법 | |
| KR100775284B1 (ko) | 무선 측위 시스템을 위한 비가시경로 오차 보정 방법 | |
| JP2007513356A (ja) | 総受信電力を用いた過剰遅延の推定 | |
| JP2002006027A (ja) | 無線網グローバルポジショニング一体化(wgp)システムの無線端末に対する往復遅延時間(rtd)パラメータを得るための方法。 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080520 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080820 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080827 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091006 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100106 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100114 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101001 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20101008 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20110325 |