JP2005294280A - 密閉容器搬送システム - Google Patents
密閉容器搬送システム Download PDFInfo
- Publication number
- JP2005294280A JP2005294280A JP2002111227A JP2002111227A JP2005294280A JP 2005294280 A JP2005294280 A JP 2005294280A JP 2002111227 A JP2002111227 A JP 2002111227A JP 2002111227 A JP2002111227 A JP 2002111227A JP 2005294280 A JP2005294280 A JP 2005294280A
- Authority
- JP
- Japan
- Prior art keywords
- foup
- closed container
- clean room
- container
- sealed container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3218—Conveying cassettes, containers or carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C17/00—Overhead travelling cranes comprising one or more substantially horizontal girders the ends of which are directly supported by wheels or rollers running on tracks carried by spaced supports
- B66C17/06—Overhead travelling cranes comprising one or more substantially horizontal girders the ends of which are directly supported by wheels or rollers running on tracks carried by spaced supports specially adapted for particular purposes, e.g. in foundries, forges; combined with auxiliary apparatus serving particular purposes
- B66C17/20—Overhead travelling cranes comprising one or more substantially horizontal girders the ends of which are directly supported by wheels or rollers running on tracks carried by spaced supports specially adapted for particular purposes, e.g. in foundries, forges; combined with auxiliary apparatus serving particular purposes for hoisting or lowering heavy load carriers, e.g. freight containers, railway wagons
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3221—Overhead conveying
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/34—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H10P72/3404—Storage means
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7602—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a robot blade or gripped by a gripper for conveyance
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【課題】クリーンルーム内生産ラインで使用され、搬送効率、機能性、省スペース、安全性の点でさらに改良された密閉容器搬送システムを提供する。
【解決手段】密閉容器6を把持する密閉容器把持手段11と、クリーンルーム内上方の天井空間に敷設され、密閉容器把持手段11を水平方向に移動させる水平移動手段12と、水平移動手段12に設けられ、密閉容器把持手段11を吊持して、これを昇降および旋回させる昇降手段13とを備え、クリーンルーム内の複数の処理装置3間で、密閉容器6を自在に搬送することができるようにされてなる密閉容器搬送システム10において、密閉容器把持手段11は、複数個設けられている。昇降手段13は、テレスコピックタイプの伸縮機構からなり、その下端部に、密閉容器把持手段11を旋回させる旋回機構を備えている。
【選択図】 図1
【解決手段】密閉容器6を把持する密閉容器把持手段11と、クリーンルーム内上方の天井空間に敷設され、密閉容器把持手段11を水平方向に移動させる水平移動手段12と、水平移動手段12に設けられ、密閉容器把持手段11を吊持して、これを昇降および旋回させる昇降手段13とを備え、クリーンルーム内の複数の処理装置3間で、密閉容器6を自在に搬送することができるようにされてなる密閉容器搬送システム10において、密閉容器把持手段11は、複数個設けられている。昇降手段13は、テレスコピックタイプの伸縮機構からなり、その下端部に、密閉容器把持手段11を旋回させる旋回機構を備えている。
【選択図】 図1
Description
【0001】
【産業上の利用分野】
本願の発明は、密閉容器搬送システムに関し、特に半導体製造工場等において、クリーンルーム内に設置される複数の処理装置間でFOUP(Front OpeningUnified Pod:半導体ウエハ等を収納する前面開放可能な密閉容器)やSMIF(Standardized Mechanical Interface )ポッド(半導体ウエハ等を収納する下面開放可能な密閉容器)等の密閉容器を自在に搬送することができるようにされてなる天井走行式の密閉容器搬送システムの改良に関する。
【0002】
【従来の技術】
半導体集積回路や液晶表示パネル等の製造工程においては、ウエハやガラス基板等に塵埃やパーティクルが付着することにより製品の歩留りが低下する。このため、クリーンルーム内生産ラインが稼働しており、このクリーンルーム内に設置される各種の処理装置間でFOUPを自在に搬送することができるFOUP搬送装置やFOUP搬送システムに関して、種々の工夫がなされている。
【0003】
本出願人は、先に、クリーンルーム内上方の天井空間で、FOUPを把持するFOUP把持手段を任意の3次元方向に移動させることができる移動手段を備えたFOUP搬送装置を創案して、特許出願を行なった(特願2001−283407号)。このものにおいては、天井空間に一対の水平な固定ガイドレールが平行に配設されており、これら一対の固定ガイドレール間に水平な走行ガイドレールが1本ないし複数本架設されていて、この走行ガイドレールが固定ガイドレールに沿って走行できるようになっている。また、走行ガイドレールには、該走行ガイドレールに沿って走行する走行体が設けられており、これら固定ガイドレール、走行ガイドレール、走行体によって水平移動手段が構成されている。さらに、この走行体には、FOUP把持手段を昇降および回転させることができる昇降手段が設けられていて、該昇降手段と前記水平移動手段とにより3次元移動手段が構成されている。
【0004】
このFOUP搬送装置は、クリーンルームの床面にFOUP搬送のためのエリアが必要とされることがなく、クリーンルーム内を有効活用することができる。このため、同一設備に対しては、必要なクリーンルーム容積を小さくすることができ、クリーンルームの設備コストおよび維持コストを安価にすることができる。また、クリーンルーム内に設置される処理装置の設置位置や設置方向が制約を受けにくく、最適な配置を選択することができ、さらに、FOUP把持手段をある位置から他の位置に直線的に移動させることができるので、FOUPの搬送効率を向上させることができる、等々の優れた効果を奏するものである。
【0005】
しかも、このFOUP搬送装置にあっては、昇降手段が多関節アームからなり、該多関節アームが有する複数のアームは、それらの各端部で順次交互に互い違いに重ねて連結されており、各アームが回動することにより多関節アームが伸縮するようにされているので、多関節アームの重心がずれることがなく、アーム全体の重量バランスが安定して、多関節アームが伸長(昇降手段が下降)したときにも、重力による撓みが少ない。これにより、FOUP把持手段が各処理装置に位置ずれなくFOUPを受け渡すことができ、多関節アームの伸縮もスムースに行なわれ、FOUPを水平搬送するときには、昇降手段をコンパクトに畳んで、気流の乱れを最小限に抑えることができる、等々の優れた効果を奏するものである。
【0006】
【発明が解決しようとする課題】
しかしながら、このものは、FOUP把持手段を1つしか備えず、FOUP搬送効率の点で十分なものとは言えず、また、ストッカ(棚に加え、投入・取出しのための装置を合わせ持ったもの)が必要とされ、FOUP内収納ウエハをソートするソータも、備えられてはいたが、これを一装置として床面に配置していたため、その分のスペースが必要とされていた。さらに、昇降手段を構成する多関節アームは、コンパクトに畳むことができるとはいえ、なお、スペースを要するものであった。さらに、また、作業者の通路上方をFOUP搬送装置が通過するが、落下防止用ネットなどの配備がなく、作業者の安全が損なわれる虞があった。このように、従来のFOUP搬送装置は、搬送効率、機能性、省スペース、安全性の点で、なお、改善すべき余地が残されていた。
【0007】
本願の発明は、従来のFOUP搬送装置が有する前記のような問題点を解決して、搬送効率、機能性、省スペース、安全性の点でさらに改良を図り、クリーンルーム内生産ラインの生産効率を大きく向上させ、設備費用、維持費用を低減させて、安全面でも十分な配慮がなされた、FOUP搬送システムを提供することを課題とする。
また、本願の発明は、FOUPに限らず、同様の問題点を解決して、同様の効果を奏することができる密閉容器搬送システムを提供することを課題とする。
【0008】
【課題を解決するための手段および効果】
本願の発明は、前記のような課題を解決した密閉容器搬送システムに係り、その請求項1に記載された発明は、密閉容器を把持する密閉容器把持手段と、クリーンルーム内上方の天井空間に敷設され、前記密閉容器把持手段を水平方向に移動させる水平移動手段と、前記水平移動手段に設けられ、前記密閉容器把持手段を吊持して、これを昇降および旋回させる昇降手段とを備え、前記クリーンルーム内の複数の処理装置間で、前記密閉容器を自在に搬送することができるようにされてなる密閉容器搬送システムにおいて、前記密閉容器把持手段は、複数個設けられていることを特徴とする密閉容器搬送システムである。
【0009】
請求項1に記載された発明は、前記のように構成されているので、次のような効果を奏することができる。
クリーンルームに設置される複数の処理装置群への密閉容器の搬入と搬出とを天井走行式の密閉容器搬送システムが行なうので、クリーンルーム内搬送の省スペース化、低価格化を実現することができる。また、密閉容器把持手段は、複数個設けられているので、密閉容器のローディングとアンローディングとを短時間に行なうことができ、密閉容器の搬送効率が向上して、クリーンルーム内生産ラインの生産効率を大きく向上させることができる。
【0010】
また、その請求項2に記載された発明は、請求項1に記載の密閉容器搬送システムにおいて、その昇降手段が、テレスコピックタイプの伸縮機構からなり、その下端部に、密閉容器把持手段を旋回させる旋回機構を備えていることを特徴としている。
【0011】
この結果、昇降機構部が簡略・省スペース化され、密閉容器の短距離搬送が可能になり、クリーンルーム内搬送のさらなる省スペース化、低価格化を実現することができる。また、密閉容器把持手段の旋回機構が備えられているので、密閉容器をどのような向きにも投入・搬入することができ、どのような向きの密閉容器をも取り出すことができて、この面からも、密閉容器の搬送効率が向上する。
【0012】
また、その請求項3に記載された発明は、請求項1または請求項2に記載の密閉容器搬送システムにおいて、その作業領域内であって、作業者通路の上方に、密閉容器を載置する棚が配設されたことを特徴としている。
【0013】
この結果、別途ストッカを配置する必要がなくなり、ストック位置と処理装置位置とが接近するので、搬送タクトタイムを短時間にして、密閉容器の搬送効率をさらに向上させることができる。また、一時バッファとしても使用することができるので、プロセス時間が重要な搬送工程にも適用可能であり、機能性に富んだ密閉容器搬送システムを提供することができる。
【0014】
さらに、その請求項4に記載された発明は、請求項1ないし請求項3のいずれかに記載の密閉容器搬送システムにおいて、その作業領域内に、密閉容器内収納基板をソートするソータが配設されたことを特徴としている。
【0015】
このため、別途ソータエリアを確保する必要がなくなり、さらなる省スペース化を図ることができるともに、搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムをさらに短時間にして、密閉容器の搬送効率をさらに向上させることができる。
【0016】
さらに、また、その請求項5に記載された発明は、請求項1ないし請求項4のいずれかに記載の密閉容器搬送システムにおいて、その作業領域内に、処理装置へのアクセス部分のみが切り欠かれた安全ネットが張設されたことを特徴としている。
【0017】
この結果、密閉容器搬送システムの搬送効率、省スペース化、機能性を確保しつつ、作業者の十分な安全を図ることができる。
【0018】
【発明の実施の形態】
次に、図1ないし図8に図示される本願の請求項1ないし請求項5に記載された発明の一実施形態について説明する。
図1は、本実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ラインの基本構成を示す全体斜視図、図2は、無人搬送車により運ばれたきたFOUPを同FOUP搬送システムが処理装置に供給することを説明する同様の図、図3は、同FOUP搬送システムのFOUP把持手段部分の拡大斜視図、図4は、作業者通路の上方のFOUP搬送システムの作業領域内に棚が配設されたことを説明するクリーンルーム内生産ラインの全体斜視図、図5は、同棚上でFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図、図6は、FOUP搬送システムの作業領域内にソータが配設されたことを説明するクリーンルーム内生産ラインの全体斜視図、図7は、同ソータにFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図、図8は、FOUP搬送システムの作業領域内に安全ネットが張設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【0019】
本実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ライン1は、図1に図示されるように、クリーンルーム内の床面2に、複数の処理装置3が2列に分かれて並設されており、列と列との間が作業者通路とされ、各処理装置3には、この作業者通路に面するように、インターフェイス装置4が付設されている。
【0020】
この作業者通路および各列の隣接する処理装置3間の通路は、メンテナンス要員やオペレータ要員が作業をするための最低限のメンテナンスエリアをなし、処理装置3およびインターフェイス装置4は、このメンテナンスエリアを隔てて整列されており、このようにしてクリーンルームの床面積をできるだけ小さくし、クリーンルームの最大活用を図り、また、後述するFOUP搬送システム10によるFOUP搬送の効率化を図っている。但し、各処理装置3は、特に複数列に並んでいる必要はないし、また、前面(インターフェイス装置4が設けられる面)の向きも規定されておらず、ある程度のランダム配置が許される。
【0021】
各処理装置3は、順次FOUP内収納ワークの処理をする設備であって、それぞれ異なる処理を実施するものであるが、ワーク処理のタクトタイムのバランス等を考慮して、同一処理装置が複数含まれていてもよい。このような処理装置3としては、例えば、半導体ウエハのレジスト塗布、露光、現像、イオン打込み、アニール、スパッタリング等の処理を行なうための処理装置がある。以下の説明においても、半導体ウエハに対する処理を念頭において説明する。
【0022】
インターフェイス装置4は、処理装置3とクリーンルームとを遮断するためのバッファ空間を構成するものであって、処理装置3へのFOUP内収納ウエハの搬入、搬出は、このインターフェイス装置4を介して実行される。インターフェイス装置4のウエハ搬入出口5は、FOUP6内収納ウエハの処理装置3への搬入、搬出を行なう場合以外は密閉されている。
【0023】
このクリーンルームの上方空間には、FOUP6を各処理装置3に処理順序に従って搬送するためのFOUP搬送システム10が設けられている。床面2には、無人搬送車7(図2参照)の走行用スペースが特別に設けられており、無人搬送車7がFOUP6をその上に載置してクリーンルームに入室すると、FOUP搬送システム10の後述するFOUP把持手段11がそのFOUP6を把持して、FOUP搬送システム10がこれを所定の処理装置3に搬送する。図2には、このようにして、FOUP搬送システム10がFOUP6を所定の処理装置3に搬送しようとしているところが図示されている。なお、無人搬送車7からFOUP搬送システム10へのFOUP6の受渡しには、棚や置き台等が介在させられてもよい。
【0024】
FOUP搬送システム10は、図1に図示されるように、FOUP6を把持するFOUP把持手段11と、クリーンルーム内上方の天井空間でFOUP把持手段11を水平方向に移動させる水平移動手段12と、該水平移動手段12に設けられ、FOUP把持手段11を吊持して、これを昇降および旋回させる昇降手段13とを備えている。
【0025】
水平移動手段12は、クリーンルーム内上方の天井空間に平行に配設された一対の水平な固定ガイドレール14と、これら一対の水平な固定ガイドレール14間に架設された1本ないし複数本の走行ガイドレール15と、該走行ガイドレール15に沿って走行可能に配設された走行体16とからなっている。したがって、この水平移動手段12は、クリーンルーム内上方の天井空間で、一対の固定ガイドレール14間に挟まれたXY水平面内での走行体16の任意の移動を可能にし、これにより、昇降手段13およびFOUP把持手段11をある位置から中央の通路を挟んで反対側の他の位置に直線的に移動させて、FOUP把持手段11がインターフェイス装置4のFOUP載置台の直上にあるようにすることができる。なお、一対の水平な固定ガイドレール14の各々は、中央の通路に沿ってその片側に整列する複数のインターフェイス装置4のFOUP載置台の略直上に、複数の支柱17により支持されて配設されている。
【0026】
走行体16の走行駆動機構は、詳細には図示されないが、走行体16と一体のモータが走行ガイドレール15内に収容されていて、その回転軸に固定されたローラが走行ガイドレール15の内壁面を転動することにより、走行体16が走行ガイドレール15に沿って走行するようになっている。昇降手段13は、その基端部(上端部)がこの走行体16に固定的に連結されていて、走行体16に随伴して走行する。
【0027】
この昇降手段13は、テレスコピックタイプの伸縮機構からなり、このテレスコピックタイプの伸縮機構がZ方向に伸縮することにより、FOUP把持手段11を昇降させて、FOUP把持手段11とインターフェイス装置4との間でのFOUP6の受渡しが行なわれるようにする。昇降手段13は、その下端部に、FOUP把持手段11を旋回させる旋回機構(図示されず)を備えている。水平移動手段12と昇降手段13とにより、3次元移動機構が構成されている。なお、このような移動機構は、ガントリーロボットと呼ばれることもある。
【0028】
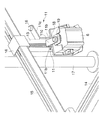
次に、FOUP把持手段11の構造について、詳細に説明する。
FOUP把持手段11は、前記のとおり、複数個設けられ(本実施形態においては2個)、これらが昇降手段13の下端部に旋回可能に取り付けられている。その具体的構造は、図3および図7により良く図示されるように、1枚の細長い金属板の中央部が凹状に折曲されて形成された底部水平片11a の中央部が、昇降手段13を構成するテレスコピックタイプの伸縮機構の下端部に回動可能に取り付けられ、底部水平片11a の両端から直角に起立する2本の垂直片11b 、11b の各上端には、底部水平片11a とは反対の側に外方に指向して上部水平片11c が延設され、この上部水平片11c の先端部に、詳細には図示されない把持爪を備えた把持具18が固着されている。
【0029】
把持具18の把持爪としては、膨縮可能な袋状の弾性体を採用することができる。この場合、FOUP把持手段11がFOUP6を把持するには、この袋状弾性体が、FOUP6の上部に固着された係止板19の中央部に形成された係合穴(図示されず)に収縮して嵌入し、嵌入後は膨張して復元し、FOUP6を係止する。また、FOUP把持手段11がFOUP6の把持を解くには、再び袋状弾性体が収縮して、この係合穴から脱出する。このように、袋状弾性体が係合穴に嵌入するときに収縮する力、および係合穴から脱出するときに再び収縮する力は、袋状弾性体が係合穴に与える力の反力に打ち勝って昇降手段13の伸縮機構が縮小し、また、伸長することよって、外部から与えられることになる。なお、把持具18は、もちろん、開閉式エアーチャックや電気的なマニピュレータによって代えられてもよい。
【0030】
上部水平片11c 、11c は、実際には、図1、図3等に図示されるように、略120度の間隔を置いて放射状に配置されている。これに合わせるように、底部水平片11a (図7参照)も、昇降手段13の伸縮機構の下端部に回動可能に取り付けられる中央部を中心にして、略120度の間隔を置くように折曲されている(図示されず)。なお、この上部水平片11c 、11c がなす角および底部水平片11a の折曲角は、120度に限定されない。極端には、底部水平片11a が一直線をなすよう(180度)にすることも可能である。
【0031】
FOUP把持手段11は、その把持具18がFOUP6を係止すると、昇降手段13により上昇させられて、水平移動手段12により所定の処理装置3まで搬送される。FOUP把持手段11が所定の処理装置3の位置に到着すると、昇降手段13により下降させられて、FOUP6がインターフェイス装置4の載置台上に載置されて固定され、昇降手段13がわずかに一旦上昇動をすることにより、把持具18がFOUP6の把持を解く。なお、FOUP6の載置方向を修正する必要が生じた場合には、把持が解かれる前に、昇降手段13が備える旋回機構が作動して、FOUP把持手段11およびFOUP6を所要量回転させ、FOUP6の載置方向を修正することができる。
【0032】
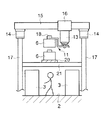
FOUP搬送システム10の作業領域内であって、作業者通路の上方には、図4および図5に図示されるように、FOUP6を載置する棚20を配設することができる。この棚20は、通路を挟んで両側に立設された支柱17間に架設された複数本の横柱21の上に載置されて固定されている。但し、この棚20は、FOUP搬送システム10の作業領域内にあるのであれば、床置きの立体的なものに代えられてもよい。
【0033】
この棚20の上には、各処理装置3に次に搬入される予定のFOUP6を該処理装置3に至近の位置に仮置き(一時ストック)することができ、また、各処理装置3から搬出されたばかりのFOUP6を該処理装置3に至近の位置に仮置きすることができる。さらに、各処理装置3のプロセス時間に応じて、それらの複数を仮置きするようにして、この棚20を一時バッファとしても使用することができる。
【0034】
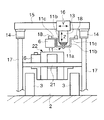
また、このFOUP搬送システム10の作業領域内には、図6および図7に図示されるように、FOUP内収納ウエハをソートするソータ22をさらに配設することができる。このソータ22は、通路を挟んで両側に立設された支柱17間に架設された2本の横柱21の間にさらに架設された井形状に枠組みされた組立て柱23に、その胴体の上下方向略中央部が支持されて、作業者通路の上方に吊持されている。組立て柱23の上面には、必要に応じて作業用の台板が敷設されてもよい。
【0035】
このソータ22は、ウエハの一連の処理工程において、FOUP6内に収納されて搬送される複数枚のウエハの各々の処理順が正しく行なわれ、また、各ウエハの経歴が分かるように、個々のウエハを所定のFOUP6内の所定の個所に収納して並べる装置である。このようなソータ22が、前記のとおり、作業者通路の上方に配設されることにより、FOUP6の搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムを短縮して、FOUPの搬送効率を向上させることができる。
【0036】
さらに、このFOUP搬送システム10の作業領域内には、図8に図示されるように、各処理装置3へのアクセス部分のみが切り欠かれた安全ネット24が、作業者通路の上方に張設されてもよい。この安全ネット24は、複数の支柱17に支持されて張設されており、クリーンエアのダウンフローを妨げないように、網状のものから構成されている。これにより、作業者の安全を図ることができる。なお、この安全ネット24の一部を、FOUP6を仮置きするための棚に兼用することもできる。
【0037】
本実施形態は、前記のように構成されているので、次のような効果を奏することができる。
クリーンルームに設置される複数の処理装置3群へのFOUP6の搬入と搬出とを天井走行式のFOUP搬送システム10が行なうので、クリーンルーム内搬送の省スペース化、低価格化を実現することができる。また、FOUP把持手段11は、複数個設けられているので、FOUP6のローディングとアンローディングとを短時間に行なうことができ、FOUP6の搬送効率が向上して、クリーンルーム内生産ラインの生産効率を大きく向上させることができる。
【0038】
また、昇降手段13は、テレスコピックタイプの伸縮機構からなり、その下端部に、FOUP把持手段11を旋回させる旋回機構を備えているので、昇降機構部が簡略・省スペース化され、FOUP6の短距離搬送が可能になり、クリーンルーム内搬送のさらなる省スペース化、低価格化を実現することができる。さらに、FOUP把持手段11の旋回機構が備えられているので、FOUP6をどのような向きにも搬入することができ、どのような向きのFOUP6をも取り出すことができて、この面からも、FOUPの搬送効率が向上する。
【0039】
また、FOUP搬送システム10の作業領域内であって、作業者通路の上方に、FOUP6を載置する棚20が配設される場合には、別途ストッカを配置する必要がなくなり、ストック位置と処理装置3位置とが接近するので、搬送タクトタイムを短時間にして、FOUPの搬送効率をさらに向上させることができる。また、棚20を一時バッファとしても使用することができるので、プロセス時間が重要な搬送工程にも適用可能であり、機能性に富んだFOUP搬送システム10を提供することができる。
【0040】
さらに、FOUP搬送システム10の作業領域内に、FOUP内収納ウエハのソータ22が配設される場合には、別途ソータエリアを確保する必要がなくなり、さらなる省スペース化を図ることができるともに、搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムをさらに短時間にして、FOUP6の搬送効率をさらに向上させることができる。
【0041】
さらに、また、FOUP搬送システム10の作業領域内に、各処理装置3へのアクセス部分のみが切り欠かれた安全ネット24が張設される場合には、FOUP搬送システム10の搬送効率、省スペース化、機能性を確保しつつ、作業者の十分な安全を図ることができる。
【0042】
なお、本実施形態においては、無人搬送車7が使用されたが、これに限定されず、空中搬送車を使用することができる。このほか、FOUP搬送システム10の作業領域にFOUP6を搬送することができるのであれば、どのような搬送手段が採用されてもよい。
【0043】
また、本実施形態においては、把持具18を備えるFOUP把持手段11が使用されたが、これに限定されず、フォークが使用されてもよい。
【0044】
さらに、本実施形態におけるFOUP搬送システム10は、FOUP6の代わりにSMIFポッドが搬送の対象とされても、同様に作用し、同様の効果を奏することができ、これらの容器を含めて、一般に密閉容器の搬送システムとして好適に使用することができる。
その他、本願の発明の要旨を逸脱しない範囲において、種々の変形が可能である。
【図面の簡単な説明】
【図1】本願の請求項1ないし請求項5に記載された発明の一実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ラインの基本構成を示す全体斜視図である。
【図2】無人搬送車により運ばれたきたFOUPを同FOUP搬送システムが処理装置に供給することを説明する同様の図である。
【図3】同FOUP搬送システムのFOUP把持手段部分の拡大斜視図である。
【図4】作業者通路の上方のFOUP搬送システムの作業領域内に棚が配設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【図5】同棚上でFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図である。
【図6】FOUP搬送システムの作業領域内にソータが配設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【図7】同ソータにFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図である。
【図8】FOUP搬送システムの作業領域内に安全ネットが張設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【符号の説明】
1…クリーンルーム内生産ライン、2…床面、3…処理装置、4…インターフェイス装置、5…FOUP搬入出口、6…FOUP、7…無人搬送車、10…FOUP搬送システム、11…FOUP把持手段、11a …底部水平片、11b …垂直片、11c …上部水平片、12…水平移動手段、13…昇降手段、14…固定ガイドレール、15…走行ガイドレール、16…走行体、17…支柱、18…把持具、19…係止板、20…棚、21…横柱、22…ソータ、23…井形状組立て柱、24…安全ネット。
【産業上の利用分野】
本願の発明は、密閉容器搬送システムに関し、特に半導体製造工場等において、クリーンルーム内に設置される複数の処理装置間でFOUP(Front OpeningUnified Pod:半導体ウエハ等を収納する前面開放可能な密閉容器)やSMIF(Standardized Mechanical Interface )ポッド(半導体ウエハ等を収納する下面開放可能な密閉容器)等の密閉容器を自在に搬送することができるようにされてなる天井走行式の密閉容器搬送システムの改良に関する。
【0002】
【従来の技術】
半導体集積回路や液晶表示パネル等の製造工程においては、ウエハやガラス基板等に塵埃やパーティクルが付着することにより製品の歩留りが低下する。このため、クリーンルーム内生産ラインが稼働しており、このクリーンルーム内に設置される各種の処理装置間でFOUPを自在に搬送することができるFOUP搬送装置やFOUP搬送システムに関して、種々の工夫がなされている。
【0003】
本出願人は、先に、クリーンルーム内上方の天井空間で、FOUPを把持するFOUP把持手段を任意の3次元方向に移動させることができる移動手段を備えたFOUP搬送装置を創案して、特許出願を行なった(特願2001−283407号)。このものにおいては、天井空間に一対の水平な固定ガイドレールが平行に配設されており、これら一対の固定ガイドレール間に水平な走行ガイドレールが1本ないし複数本架設されていて、この走行ガイドレールが固定ガイドレールに沿って走行できるようになっている。また、走行ガイドレールには、該走行ガイドレールに沿って走行する走行体が設けられており、これら固定ガイドレール、走行ガイドレール、走行体によって水平移動手段が構成されている。さらに、この走行体には、FOUP把持手段を昇降および回転させることができる昇降手段が設けられていて、該昇降手段と前記水平移動手段とにより3次元移動手段が構成されている。
【0004】
このFOUP搬送装置は、クリーンルームの床面にFOUP搬送のためのエリアが必要とされることがなく、クリーンルーム内を有効活用することができる。このため、同一設備に対しては、必要なクリーンルーム容積を小さくすることができ、クリーンルームの設備コストおよび維持コストを安価にすることができる。また、クリーンルーム内に設置される処理装置の設置位置や設置方向が制約を受けにくく、最適な配置を選択することができ、さらに、FOUP把持手段をある位置から他の位置に直線的に移動させることができるので、FOUPの搬送効率を向上させることができる、等々の優れた効果を奏するものである。
【0005】
しかも、このFOUP搬送装置にあっては、昇降手段が多関節アームからなり、該多関節アームが有する複数のアームは、それらの各端部で順次交互に互い違いに重ねて連結されており、各アームが回動することにより多関節アームが伸縮するようにされているので、多関節アームの重心がずれることがなく、アーム全体の重量バランスが安定して、多関節アームが伸長(昇降手段が下降)したときにも、重力による撓みが少ない。これにより、FOUP把持手段が各処理装置に位置ずれなくFOUPを受け渡すことができ、多関節アームの伸縮もスムースに行なわれ、FOUPを水平搬送するときには、昇降手段をコンパクトに畳んで、気流の乱れを最小限に抑えることができる、等々の優れた効果を奏するものである。
【0006】
【発明が解決しようとする課題】
しかしながら、このものは、FOUP把持手段を1つしか備えず、FOUP搬送効率の点で十分なものとは言えず、また、ストッカ(棚に加え、投入・取出しのための装置を合わせ持ったもの)が必要とされ、FOUP内収納ウエハをソートするソータも、備えられてはいたが、これを一装置として床面に配置していたため、その分のスペースが必要とされていた。さらに、昇降手段を構成する多関節アームは、コンパクトに畳むことができるとはいえ、なお、スペースを要するものであった。さらに、また、作業者の通路上方をFOUP搬送装置が通過するが、落下防止用ネットなどの配備がなく、作業者の安全が損なわれる虞があった。このように、従来のFOUP搬送装置は、搬送効率、機能性、省スペース、安全性の点で、なお、改善すべき余地が残されていた。
【0007】
本願の発明は、従来のFOUP搬送装置が有する前記のような問題点を解決して、搬送効率、機能性、省スペース、安全性の点でさらに改良を図り、クリーンルーム内生産ラインの生産効率を大きく向上させ、設備費用、維持費用を低減させて、安全面でも十分な配慮がなされた、FOUP搬送システムを提供することを課題とする。
また、本願の発明は、FOUPに限らず、同様の問題点を解決して、同様の効果を奏することができる密閉容器搬送システムを提供することを課題とする。
【0008】
【課題を解決するための手段および効果】
本願の発明は、前記のような課題を解決した密閉容器搬送システムに係り、その請求項1に記載された発明は、密閉容器を把持する密閉容器把持手段と、クリーンルーム内上方の天井空間に敷設され、前記密閉容器把持手段を水平方向に移動させる水平移動手段と、前記水平移動手段に設けられ、前記密閉容器把持手段を吊持して、これを昇降および旋回させる昇降手段とを備え、前記クリーンルーム内の複数の処理装置間で、前記密閉容器を自在に搬送することができるようにされてなる密閉容器搬送システムにおいて、前記密閉容器把持手段は、複数個設けられていることを特徴とする密閉容器搬送システムである。
【0009】
請求項1に記載された発明は、前記のように構成されているので、次のような効果を奏することができる。
クリーンルームに設置される複数の処理装置群への密閉容器の搬入と搬出とを天井走行式の密閉容器搬送システムが行なうので、クリーンルーム内搬送の省スペース化、低価格化を実現することができる。また、密閉容器把持手段は、複数個設けられているので、密閉容器のローディングとアンローディングとを短時間に行なうことができ、密閉容器の搬送効率が向上して、クリーンルーム内生産ラインの生産効率を大きく向上させることができる。
【0010】
また、その請求項2に記載された発明は、請求項1に記載の密閉容器搬送システムにおいて、その昇降手段が、テレスコピックタイプの伸縮機構からなり、その下端部に、密閉容器把持手段を旋回させる旋回機構を備えていることを特徴としている。
【0011】
この結果、昇降機構部が簡略・省スペース化され、密閉容器の短距離搬送が可能になり、クリーンルーム内搬送のさらなる省スペース化、低価格化を実現することができる。また、密閉容器把持手段の旋回機構が備えられているので、密閉容器をどのような向きにも投入・搬入することができ、どのような向きの密閉容器をも取り出すことができて、この面からも、密閉容器の搬送効率が向上する。
【0012】
また、その請求項3に記載された発明は、請求項1または請求項2に記載の密閉容器搬送システムにおいて、その作業領域内であって、作業者通路の上方に、密閉容器を載置する棚が配設されたことを特徴としている。
【0013】
この結果、別途ストッカを配置する必要がなくなり、ストック位置と処理装置位置とが接近するので、搬送タクトタイムを短時間にして、密閉容器の搬送効率をさらに向上させることができる。また、一時バッファとしても使用することができるので、プロセス時間が重要な搬送工程にも適用可能であり、機能性に富んだ密閉容器搬送システムを提供することができる。
【0014】
さらに、その請求項4に記載された発明は、請求項1ないし請求項3のいずれかに記載の密閉容器搬送システムにおいて、その作業領域内に、密閉容器内収納基板をソートするソータが配設されたことを特徴としている。
【0015】
このため、別途ソータエリアを確保する必要がなくなり、さらなる省スペース化を図ることができるともに、搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムをさらに短時間にして、密閉容器の搬送効率をさらに向上させることができる。
【0016】
さらに、また、その請求項5に記載された発明は、請求項1ないし請求項4のいずれかに記載の密閉容器搬送システムにおいて、その作業領域内に、処理装置へのアクセス部分のみが切り欠かれた安全ネットが張設されたことを特徴としている。
【0017】
この結果、密閉容器搬送システムの搬送効率、省スペース化、機能性を確保しつつ、作業者の十分な安全を図ることができる。
【0018】
【発明の実施の形態】
次に、図1ないし図8に図示される本願の請求項1ないし請求項5に記載された発明の一実施形態について説明する。
図1は、本実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ラインの基本構成を示す全体斜視図、図2は、無人搬送車により運ばれたきたFOUPを同FOUP搬送システムが処理装置に供給することを説明する同様の図、図3は、同FOUP搬送システムのFOUP把持手段部分の拡大斜視図、図4は、作業者通路の上方のFOUP搬送システムの作業領域内に棚が配設されたことを説明するクリーンルーム内生産ラインの全体斜視図、図5は、同棚上でFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図、図6は、FOUP搬送システムの作業領域内にソータが配設されたことを説明するクリーンルーム内生産ラインの全体斜視図、図7は、同ソータにFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図、図8は、FOUP搬送システムの作業領域内に安全ネットが張設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【0019】
本実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ライン1は、図1に図示されるように、クリーンルーム内の床面2に、複数の処理装置3が2列に分かれて並設されており、列と列との間が作業者通路とされ、各処理装置3には、この作業者通路に面するように、インターフェイス装置4が付設されている。
【0020】
この作業者通路および各列の隣接する処理装置3間の通路は、メンテナンス要員やオペレータ要員が作業をするための最低限のメンテナンスエリアをなし、処理装置3およびインターフェイス装置4は、このメンテナンスエリアを隔てて整列されており、このようにしてクリーンルームの床面積をできるだけ小さくし、クリーンルームの最大活用を図り、また、後述するFOUP搬送システム10によるFOUP搬送の効率化を図っている。但し、各処理装置3は、特に複数列に並んでいる必要はないし、また、前面(インターフェイス装置4が設けられる面)の向きも規定されておらず、ある程度のランダム配置が許される。
【0021】
各処理装置3は、順次FOUP内収納ワークの処理をする設備であって、それぞれ異なる処理を実施するものであるが、ワーク処理のタクトタイムのバランス等を考慮して、同一処理装置が複数含まれていてもよい。このような処理装置3としては、例えば、半導体ウエハのレジスト塗布、露光、現像、イオン打込み、アニール、スパッタリング等の処理を行なうための処理装置がある。以下の説明においても、半導体ウエハに対する処理を念頭において説明する。
【0022】
インターフェイス装置4は、処理装置3とクリーンルームとを遮断するためのバッファ空間を構成するものであって、処理装置3へのFOUP内収納ウエハの搬入、搬出は、このインターフェイス装置4を介して実行される。インターフェイス装置4のウエハ搬入出口5は、FOUP6内収納ウエハの処理装置3への搬入、搬出を行なう場合以外は密閉されている。
【0023】
このクリーンルームの上方空間には、FOUP6を各処理装置3に処理順序に従って搬送するためのFOUP搬送システム10が設けられている。床面2には、無人搬送車7(図2参照)の走行用スペースが特別に設けられており、無人搬送車7がFOUP6をその上に載置してクリーンルームに入室すると、FOUP搬送システム10の後述するFOUP把持手段11がそのFOUP6を把持して、FOUP搬送システム10がこれを所定の処理装置3に搬送する。図2には、このようにして、FOUP搬送システム10がFOUP6を所定の処理装置3に搬送しようとしているところが図示されている。なお、無人搬送車7からFOUP搬送システム10へのFOUP6の受渡しには、棚や置き台等が介在させられてもよい。
【0024】
FOUP搬送システム10は、図1に図示されるように、FOUP6を把持するFOUP把持手段11と、クリーンルーム内上方の天井空間でFOUP把持手段11を水平方向に移動させる水平移動手段12と、該水平移動手段12に設けられ、FOUP把持手段11を吊持して、これを昇降および旋回させる昇降手段13とを備えている。
【0025】
水平移動手段12は、クリーンルーム内上方の天井空間に平行に配設された一対の水平な固定ガイドレール14と、これら一対の水平な固定ガイドレール14間に架設された1本ないし複数本の走行ガイドレール15と、該走行ガイドレール15に沿って走行可能に配設された走行体16とからなっている。したがって、この水平移動手段12は、クリーンルーム内上方の天井空間で、一対の固定ガイドレール14間に挟まれたXY水平面内での走行体16の任意の移動を可能にし、これにより、昇降手段13およびFOUP把持手段11をある位置から中央の通路を挟んで反対側の他の位置に直線的に移動させて、FOUP把持手段11がインターフェイス装置4のFOUP載置台の直上にあるようにすることができる。なお、一対の水平な固定ガイドレール14の各々は、中央の通路に沿ってその片側に整列する複数のインターフェイス装置4のFOUP載置台の略直上に、複数の支柱17により支持されて配設されている。
【0026】
走行体16の走行駆動機構は、詳細には図示されないが、走行体16と一体のモータが走行ガイドレール15内に収容されていて、その回転軸に固定されたローラが走行ガイドレール15の内壁面を転動することにより、走行体16が走行ガイドレール15に沿って走行するようになっている。昇降手段13は、その基端部(上端部)がこの走行体16に固定的に連結されていて、走行体16に随伴して走行する。
【0027】
この昇降手段13は、テレスコピックタイプの伸縮機構からなり、このテレスコピックタイプの伸縮機構がZ方向に伸縮することにより、FOUP把持手段11を昇降させて、FOUP把持手段11とインターフェイス装置4との間でのFOUP6の受渡しが行なわれるようにする。昇降手段13は、その下端部に、FOUP把持手段11を旋回させる旋回機構(図示されず)を備えている。水平移動手段12と昇降手段13とにより、3次元移動機構が構成されている。なお、このような移動機構は、ガントリーロボットと呼ばれることもある。
【0028】
次に、FOUP把持手段11の構造について、詳細に説明する。
FOUP把持手段11は、前記のとおり、複数個設けられ(本実施形態においては2個)、これらが昇降手段13の下端部に旋回可能に取り付けられている。その具体的構造は、図3および図7により良く図示されるように、1枚の細長い金属板の中央部が凹状に折曲されて形成された底部水平片11a の中央部が、昇降手段13を構成するテレスコピックタイプの伸縮機構の下端部に回動可能に取り付けられ、底部水平片11a の両端から直角に起立する2本の垂直片11b 、11b の各上端には、底部水平片11a とは反対の側に外方に指向して上部水平片11c が延設され、この上部水平片11c の先端部に、詳細には図示されない把持爪を備えた把持具18が固着されている。
【0029】
把持具18の把持爪としては、膨縮可能な袋状の弾性体を採用することができる。この場合、FOUP把持手段11がFOUP6を把持するには、この袋状弾性体が、FOUP6の上部に固着された係止板19の中央部に形成された係合穴(図示されず)に収縮して嵌入し、嵌入後は膨張して復元し、FOUP6を係止する。また、FOUP把持手段11がFOUP6の把持を解くには、再び袋状弾性体が収縮して、この係合穴から脱出する。このように、袋状弾性体が係合穴に嵌入するときに収縮する力、および係合穴から脱出するときに再び収縮する力は、袋状弾性体が係合穴に与える力の反力に打ち勝って昇降手段13の伸縮機構が縮小し、また、伸長することよって、外部から与えられることになる。なお、把持具18は、もちろん、開閉式エアーチャックや電気的なマニピュレータによって代えられてもよい。
【0030】
上部水平片11c 、11c は、実際には、図1、図3等に図示されるように、略120度の間隔を置いて放射状に配置されている。これに合わせるように、底部水平片11a (図7参照)も、昇降手段13の伸縮機構の下端部に回動可能に取り付けられる中央部を中心にして、略120度の間隔を置くように折曲されている(図示されず)。なお、この上部水平片11c 、11c がなす角および底部水平片11a の折曲角は、120度に限定されない。極端には、底部水平片11a が一直線をなすよう(180度)にすることも可能である。
【0031】
FOUP把持手段11は、その把持具18がFOUP6を係止すると、昇降手段13により上昇させられて、水平移動手段12により所定の処理装置3まで搬送される。FOUP把持手段11が所定の処理装置3の位置に到着すると、昇降手段13により下降させられて、FOUP6がインターフェイス装置4の載置台上に載置されて固定され、昇降手段13がわずかに一旦上昇動をすることにより、把持具18がFOUP6の把持を解く。なお、FOUP6の載置方向を修正する必要が生じた場合には、把持が解かれる前に、昇降手段13が備える旋回機構が作動して、FOUP把持手段11およびFOUP6を所要量回転させ、FOUP6の載置方向を修正することができる。
【0032】
FOUP搬送システム10の作業領域内であって、作業者通路の上方には、図4および図5に図示されるように、FOUP6を載置する棚20を配設することができる。この棚20は、通路を挟んで両側に立設された支柱17間に架設された複数本の横柱21の上に載置されて固定されている。但し、この棚20は、FOUP搬送システム10の作業領域内にあるのであれば、床置きの立体的なものに代えられてもよい。
【0033】
この棚20の上には、各処理装置3に次に搬入される予定のFOUP6を該処理装置3に至近の位置に仮置き(一時ストック)することができ、また、各処理装置3から搬出されたばかりのFOUP6を該処理装置3に至近の位置に仮置きすることができる。さらに、各処理装置3のプロセス時間に応じて、それらの複数を仮置きするようにして、この棚20を一時バッファとしても使用することができる。
【0034】
また、このFOUP搬送システム10の作業領域内には、図6および図7に図示されるように、FOUP内収納ウエハをソートするソータ22をさらに配設することができる。このソータ22は、通路を挟んで両側に立設された支柱17間に架設された2本の横柱21の間にさらに架設された井形状に枠組みされた組立て柱23に、その胴体の上下方向略中央部が支持されて、作業者通路の上方に吊持されている。組立て柱23の上面には、必要に応じて作業用の台板が敷設されてもよい。
【0035】
このソータ22は、ウエハの一連の処理工程において、FOUP6内に収納されて搬送される複数枚のウエハの各々の処理順が正しく行なわれ、また、各ウエハの経歴が分かるように、個々のウエハを所定のFOUP6内の所定の個所に収納して並べる装置である。このようなソータ22が、前記のとおり、作業者通路の上方に配設されることにより、FOUP6の搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムを短縮して、FOUPの搬送効率を向上させることができる。
【0036】
さらに、このFOUP搬送システム10の作業領域内には、図8に図示されるように、各処理装置3へのアクセス部分のみが切り欠かれた安全ネット24が、作業者通路の上方に張設されてもよい。この安全ネット24は、複数の支柱17に支持されて張設されており、クリーンエアのダウンフローを妨げないように、網状のものから構成されている。これにより、作業者の安全を図ることができる。なお、この安全ネット24の一部を、FOUP6を仮置きするための棚に兼用することもできる。
【0037】
本実施形態は、前記のように構成されているので、次のような効果を奏することができる。
クリーンルームに設置される複数の処理装置3群へのFOUP6の搬入と搬出とを天井走行式のFOUP搬送システム10が行なうので、クリーンルーム内搬送の省スペース化、低価格化を実現することができる。また、FOUP把持手段11は、複数個設けられているので、FOUP6のローディングとアンローディングとを短時間に行なうことができ、FOUP6の搬送効率が向上して、クリーンルーム内生産ラインの生産効率を大きく向上させることができる。
【0038】
また、昇降手段13は、テレスコピックタイプの伸縮機構からなり、その下端部に、FOUP把持手段11を旋回させる旋回機構を備えているので、昇降機構部が簡略・省スペース化され、FOUP6の短距離搬送が可能になり、クリーンルーム内搬送のさらなる省スペース化、低価格化を実現することができる。さらに、FOUP把持手段11の旋回機構が備えられているので、FOUP6をどのような向きにも搬入することができ、どのような向きのFOUP6をも取り出すことができて、この面からも、FOUPの搬送効率が向上する。
【0039】
また、FOUP搬送システム10の作業領域内であって、作業者通路の上方に、FOUP6を載置する棚20が配設される場合には、別途ストッカを配置する必要がなくなり、ストック位置と処理装置3位置とが接近するので、搬送タクトタイムを短時間にして、FOUPの搬送効率をさらに向上させることができる。また、棚20を一時バッファとしても使用することができるので、プロセス時間が重要な搬送工程にも適用可能であり、機能性に富んだFOUP搬送システム10を提供することができる。
【0040】
さらに、FOUP搬送システム10の作業領域内に、FOUP内収納ウエハのソータ22が配設される場合には、別途ソータエリアを確保する必要がなくなり、さらなる省スペース化を図ることができるともに、搬送途中でのウエハの積み替えが可能になり、搬送タクトタイムをさらに短時間にして、FOUP6の搬送効率をさらに向上させることができる。
【0041】
さらに、また、FOUP搬送システム10の作業領域内に、各処理装置3へのアクセス部分のみが切り欠かれた安全ネット24が張設される場合には、FOUP搬送システム10の搬送効率、省スペース化、機能性を確保しつつ、作業者の十分な安全を図ることができる。
【0042】
なお、本実施形態においては、無人搬送車7が使用されたが、これに限定されず、空中搬送車を使用することができる。このほか、FOUP搬送システム10の作業領域にFOUP6を搬送することができるのであれば、どのような搬送手段が採用されてもよい。
【0043】
また、本実施形態においては、把持具18を備えるFOUP把持手段11が使用されたが、これに限定されず、フォークが使用されてもよい。
【0044】
さらに、本実施形態におけるFOUP搬送システム10は、FOUP6の代わりにSMIFポッドが搬送の対象とされても、同様に作用し、同様の効果を奏することができ、これらの容器を含めて、一般に密閉容器の搬送システムとして好適に使用することができる。
その他、本願の発明の要旨を逸脱しない範囲において、種々の変形が可能である。
【図面の簡単な説明】
【図1】本願の請求項1ないし請求項5に記載された発明の一実施形態におけるFOUP搬送システムが適用されるクリーンルーム内生産ラインの基本構成を示す全体斜視図である。
【図2】無人搬送車により運ばれたきたFOUPを同FOUP搬送システムが処理装置に供給することを説明する同様の図である。
【図3】同FOUP搬送システムのFOUP把持手段部分の拡大斜視図である。
【図4】作業者通路の上方のFOUP搬送システムの作業領域内に棚が配設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【図5】同棚上でFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図である。
【図6】FOUP搬送システムの作業領域内にソータが配設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【図7】同ソータにFOUP搬送システムがFOUPの投入、取出しをしているところを示した側面図である。
【図8】FOUP搬送システムの作業領域内に安全ネットが張設されたことを説明するクリーンルーム内生産ラインの全体斜視図である。
【符号の説明】
1…クリーンルーム内生産ライン、2…床面、3…処理装置、4…インターフェイス装置、5…FOUP搬入出口、6…FOUP、7…無人搬送車、10…FOUP搬送システム、11…FOUP把持手段、11a …底部水平片、11b …垂直片、11c …上部水平片、12…水平移動手段、13…昇降手段、14…固定ガイドレール、15…走行ガイドレール、16…走行体、17…支柱、18…把持具、19…係止板、20…棚、21…横柱、22…ソータ、23…井形状組立て柱、24…安全ネット。
Claims (5)
- 密閉容器を把持する密閉容器把持手段と、
クリーンルーム内上方の天井空間に敷設され、前記密閉容器把持手段を水平方向に移動させる水平移動手段と、
前記水平移動手段に設けられ、前記密閉容器把持手段を吊持して、これを昇降および旋回させる昇降手段と
を備え、
前記クリーンルーム内の複数の処理装置間で、前記密閉容器を自在に搬送することができるようにされてなる密閉容器搬送システムにおいて、
前記密閉容器把持手段は、複数個設けられている
ことを特徴とする密閉容器搬送システム。 - 前記昇降手段は、テレスコピックタイプの伸縮機構からなり、その下端部に、前記密閉容器把持手段を旋回させる旋回機構を備えていることを特徴とする請求項1に記載の密閉容器搬送システム。
- 前記密閉容器搬送システムの作業領域内であって、作業者通路の上方に、前記密閉容器を載置する棚が配設されたことを特徴とする請求項1または請求項2に記載の密閉容器搬送システム。
- 前記密閉容器搬送システムの作業領域内に、前記密閉容器内収納基板をソートするソータが配設されたことを特徴とする請求項1ないし請求項3のいずれかに記載の密閉容器搬送システム。
- 前記密閉容器搬送システムの作業領域内に、前記処理装置へのアクセス部分のみが切り欠かれた安全ネットが張設されたことを特徴とする請求項1ないし請求項4のいずれかに記載の密閉容器搬送システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002111227A JP2005294280A (ja) | 2002-04-12 | 2002-04-12 | 密閉容器搬送システム |
| PCT/JP2003/001524 WO2003088350A1 (fr) | 2002-04-12 | 2003-02-14 | Systeme de convoyage de contenants fermes |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002111227A JP2005294280A (ja) | 2002-04-12 | 2002-04-12 | 密閉容器搬送システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005294280A true JP2005294280A (ja) | 2005-10-20 |
Family
ID=29243265
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002111227A Withdrawn JP2005294280A (ja) | 2002-04-12 | 2002-04-12 | 密閉容器搬送システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2005294280A (ja) |
| WO (1) | WO2003088350A1 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100830838B1 (ko) | 2006-12-27 | 2008-05-20 | 주식회사 케이씨텍 | 반도체 기판의 습식세정장치 |
| US8206077B2 (en) | 2009-03-17 | 2012-06-26 | Murata Machinery, Ltd. | Overhead transportation system and method of transferring article |
| CN103922115A (zh) * | 2013-01-10 | 2014-07-16 | 苏州工业园区高登威科技有限公司 | 单晶硅上料系统 |
| US9224628B2 (en) | 2005-11-07 | 2015-12-29 | Brooks Automation. Inc. | Reduced capacity carrier, transport, load port, buffer system |
| JP2017069583A (ja) * | 2006-05-11 | 2017-04-06 | ブルックス オートメーション インコーポレイテッド | 低減容量キャリア、搬送機、積載ポート、緩衝装置システム |
| EP3220413A1 (de) * | 2016-03-15 | 2017-09-20 | Integrated Dynamics Engineering GmbH | Serviceeinrichtung |
| TWI764620B (zh) * | 2021-03-12 | 2022-05-11 | 旭東機械工業股份有限公司 | 晶圓盒底側面檢測機構及其方法 |
| JP2023067972A (ja) * | 2005-11-07 | 2023-05-16 | ブルックス オートメーション ユーエス、エルエルシー | 半導体被加工物処理システム |
| CN116161556A (zh) * | 2023-04-24 | 2023-05-26 | 阿尔法起重机有限公司 | 一种自清洁型双梁抓斗起重机 |
| JP2024010483A (ja) * | 2022-07-12 | 2024-01-24 | 株式会社ダイフク | 搬送装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4045451B2 (ja) | 2003-12-26 | 2008-02-13 | 村田機械株式会社 | 天井走行車システム |
| JP4378656B2 (ja) | 2007-03-07 | 2009-12-09 | 株式会社ダイフク | 物品搬送設備 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03154751A (ja) * | 1989-11-08 | 1991-07-02 | Hitachi Ltd | 多品種搬送方法及び装置 |
| JPH08324968A (ja) * | 1995-05-29 | 1996-12-10 | Tsubakimoto Chain Co | 天井搬送物品の落下防止部材取付装置 |
| US6009890A (en) * | 1997-01-21 | 2000-01-04 | Tokyo Electron Limited | Substrate transporting and processing system |
| JP4047477B2 (ja) * | 1999-02-19 | 2008-02-13 | 平田機工株式会社 | ワーク搬送システム |
-
2002
- 2002-04-12 JP JP2002111227A patent/JP2005294280A/ja not_active Withdrawn
-
2003
- 2003-02-14 WO PCT/JP2003/001524 patent/WO2003088350A1/ja not_active Ceased
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10679882B2 (en) | 2005-11-07 | 2020-06-09 | Brooks Automation, Inc | Reduced capacity carrier, transport, load port, buffer system |
| US9224628B2 (en) | 2005-11-07 | 2015-12-29 | Brooks Automation. Inc. | Reduced capacity carrier, transport, load port, buffer system |
| JP2023067972A (ja) * | 2005-11-07 | 2023-05-16 | ブルックス オートメーション ユーエス、エルエルシー | 半導体被加工物処理システム |
| JP2017069583A (ja) * | 2006-05-11 | 2017-04-06 | ブルックス オートメーション インコーポレイテッド | 低減容量キャリア、搬送機、積載ポート、緩衝装置システム |
| JP2019192942A (ja) * | 2006-05-11 | 2019-10-31 | ブルックス オートメーション インコーポレイテッド | 半導体部品処理システム |
| JP2016174167A (ja) * | 2006-08-18 | 2016-09-29 | ブルックス オートメーション インコーポレイテッド | 低減容量キャリア、搬送機、積載ポート及び緩衝装置システム |
| KR100830838B1 (ko) | 2006-12-27 | 2008-05-20 | 주식회사 케이씨텍 | 반도체 기판의 습식세정장치 |
| US8206077B2 (en) | 2009-03-17 | 2012-06-26 | Murata Machinery, Ltd. | Overhead transportation system and method of transferring article |
| CN103922115A (zh) * | 2013-01-10 | 2014-07-16 | 苏州工业园区高登威科技有限公司 | 单晶硅上料系统 |
| US10322919B2 (en) | 2016-03-15 | 2019-06-18 | Integrated Dynamics Engineering Gmbh | Maintenance apparatus |
| EP3220413A1 (de) * | 2016-03-15 | 2017-09-20 | Integrated Dynamics Engineering GmbH | Serviceeinrichtung |
| TWI764620B (zh) * | 2021-03-12 | 2022-05-11 | 旭東機械工業股份有限公司 | 晶圓盒底側面檢測機構及其方法 |
| JP2024010483A (ja) * | 2022-07-12 | 2024-01-24 | 株式会社ダイフク | 搬送装置 |
| US12492079B2 (en) | 2022-07-12 | 2025-12-09 | Daifuku Co., Ltd. | Conveyance device |
| CN116161556A (zh) * | 2023-04-24 | 2023-05-26 | 阿尔法起重机有限公司 | 一种自清洁型双梁抓斗起重机 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2003088350A1 (fr) | 2003-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7780392B2 (en) | Horizontal array stocker | |
| CN102804355B (zh) | 基片容器存储系统 | |
| CN102460675B (zh) | 与基片容器存储系统交接的集成系统 | |
| US9842756B2 (en) | Integrated systems for interfacing with substrate container storage systems | |
| EP2092555B1 (en) | Workpiece stocker with circular configuration | |
| TWI722208B (zh) | 搬送系統 | |
| TWI548024B (zh) | 用於半導體製程區之晶圓處理系統以及在半導體設備間輸送晶圓之裝置及方法 | |
| US9048274B2 (en) | Portable stocker and method of using same | |
| WO2020153041A1 (ja) | 搬送システム | |
| JP5152700B2 (ja) | 高処理量amhsのためのモジュール式ターミナル | |
| JP2008546180A (ja) | コンベヤと半導体処理ツール搭載ポートとの間のインタフェース装置 | |
| JPWO2019181241A1 (ja) | ストッカシステム | |
| US9048271B2 (en) | Modular semiconductor processing system | |
| CN112930312B (zh) | 桥式输送车 | |
| WO2000051921A1 (en) | Material handling and transport system and process | |
| JP2005294280A (ja) | 密閉容器搬送システム | |
| US20050095110A1 (en) | Method and apparatus for unloading substrate carriers from substrate carrier transport system | |
| KR20020064918A (ko) | 웨이퍼 이송 시스템 | |
| KR20220058223A (ko) | 캐리지 로봇 및 이를 포함하는 타워 리프트 | |
| TW201348100A (zh) | 搬送系統 | |
| JP4280466B2 (ja) | 位置決め機構、並びにこれを具えた装置及び自動化システム | |
| TW202422758A (zh) | 保管系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20051101 |