JP2005292040A - ナビゲーション装置 - Google Patents
ナビゲーション装置 Download PDFInfo
- Publication number
- JP2005292040A JP2005292040A JP2004110155A JP2004110155A JP2005292040A JP 2005292040 A JP2005292040 A JP 2005292040A JP 2004110155 A JP2004110155 A JP 2004110155A JP 2004110155 A JP2004110155 A JP 2004110155A JP 2005292040 A JP2005292040 A JP 2005292040A
- Authority
- JP
- Japan
- Prior art keywords
- roundabout
- exit
- lane
- travel
- approach
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3658—Lane guidance
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】 ラウンドアバウト内の走行レーンを間違えずに効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができるナビゲーション装置を提供すること。
【解決手段】 カーナビゲーション装置は、推奨経路算出部11によって算出された推奨経路にラウンドアバウト20が含まれている場合に、ラウンドアバウト20の出口の方位を検出した後、ラウンドアバウト20の進入道路20dから出口までの走行レーンの数を検出し、ラウンドアバウト20の進入道路20dから出口までの走行レーン位置を通知する。
【選択図】 図1
【解決手段】 カーナビゲーション装置は、推奨経路算出部11によって算出された推奨経路にラウンドアバウト20が含まれている場合に、ラウンドアバウト20の出口の方位を検出した後、ラウンドアバウト20の進入道路20dから出口までの走行レーンの数を検出し、ラウンドアバウト20の進入道路20dから出口までの走行レーン位置を通知する。
【選択図】 図1
Description
本発明はナビゲーション装置に関し、例えば、車両等の移動体に搭載され、目的地までの案内道路に含まれたラウンドアバウトに対する特有な経路案内機能を備えたナビゲーション装置に関するものである。
従来からナビゲーション装置において、案内される推奨経路の中に、ラウンドアバウトと呼ばれるロータリー状の道路が含まれる場合があり、このようなラウンドアバウトを走行するときには、適切な案内を行う必要がある。
このラウンドアバウトの走行時に適切な案内を行うものとしては、例えば、特許文献1に示すナビゲーション装置が知られており、図7のように示される。
図7において、自車の現在位置がラウンドアバウトRAの位置Aに進入した場合に、地図データベースからラウンドアバウトRAの出口までに通過すべき道路数を抽出して、その値をカウンタに設置し、自車の現在位置がラウンドアバウトRA内部である位置B乃至位置Eにある場合に、自車が通過すべき道路を通過する毎に、カウンタ値の値(道路数)を減算して、その値をカウンタに後進設定し、このカウンタ値に基づいてラウンドアバウトRAの出口に到達するまでに通過すべき道路数、あるいは進むべき出口の方向をドライバーに通知するようになっている。
特許文献1に示すものは、ドライバー自身が出口までに通過すべき道路数をカウントする必要がないので、ドライバーは運転に集中することができるととともに、ラウンドアバウトからの出口を分かり易く、かつ正確に案内することができる。
特開2002−228475号公報
しかしながら、特許文献1に示す従来のナビゲーション装置にあっては、ラウンドアバウトの直径が大きく、複数の走行レーン数がある場合には、走行レーン位置を指示する手段がないので、ラウンドアバウト内の走行レーンを間違えると効率的にラウンドアバウト内を走行することができず、正しい出口を出ることができなくなるという問題があった。
本発明は、従来の問題を解決するためになされたもので、ラウンドアバウト内の走行レーンを間違えずに効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができるナビゲーション装置を提供することを目的とする。
本発明のナビゲーション装置は、地図情報を取得する地図情報取得手段と、移動体の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの推奨経路を算出する推奨経路算出手段と、前記推奨経路にラウンドアバウトが含まれている場合に、前記ラウンドアバウトの出口の方位を検出する方位検出手段と、前記ラウンドアバウトの進入道路から前記出口までの走行レーンの数を検出する走行レーン数検出手段と、前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知する通知手段とを備えたものから構成される。
この構成により、ラウンドアバウトの進入道路から出口までの走行レーンの数に応じてラウンドアバウトの進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト内の走行レーンを間違えずに効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができる。
また、本発明のナビゲーション装置は、前記ラウンドアバウトの進入路の走行レーン数を検出する進入路レーン数検出手段を有し、前記通知手段は、前記進入路の走行レーン数を加味して前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知するものから構成される。
この構成により、ラウンドアバウトの進入道路の走行レーンの数を加味してラウンドアバウトの進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト内の走行レーンを間違えずにより一層効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができる。
また、本発明のナビゲーション装置は、前記ラウンドアバウトの進入路における信号機の有無を検出する信号機検出手段を有し、前記通知手段は、前記信号機の有無を加味して前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知するものから構成される。
この構成により、ラウンドアバウトの進入道路の信号機の有無を加味してラウンドアバウトの進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト内の走行レーンを間違えずにより一層効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができる。
以上説明したように、本発明は、ラウンドアバウト内の走行レーンを間違えずに効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができる。
以下、本発明の実施の形態について、図面を用いて説明する。
図1乃至図6は本発明に係るナビゲーション装置の一実施の形態を示す図であり、ナビゲーション装置として車両(移動体)に設けられたカーナビゲーション装置を例に説明する。
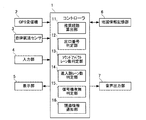
まず、構成を説明する。図1において、カーナビゲーション装置は、コントローラ1、GPS受信機2、自律航法センサ3、入力部4、表示部5、地図情報記憶部6および音声出力部7を含んで構成される。
コントローラ1は、CPU、RAM、ROM等を備えており、カーナビゲーション全体を制御するようになっている。GPS受信機2は、複数の衛星から送信される電波を検出して車両(自車)の絶対的な現在位置(緯度、経度)を取得してコントローラ1に出力する。
自律航法センサ3は、距離センサや方位センサ等を含んで構成されている。車輪の回転に応じて出力されるパルス信号を検出して、車両の移動量を算出する。方位センサはジャイロスコープで方位を直接検出したり、角速度センサで車両の角速度を検出して移動方位の変化量を算出する。
自律航法センサ3は方位信号および車速信号により車両の相対的な位置信号を算出してコントローラ1に出力する。本実施の形態では、GPS受信機2および自律航法センサ3が現在位置取得手段を構成している。
入力部4は、リモコンやタッチパネル等から構成されており、カーナビゲーション装置を操作するための種々の入力を行う。表示部5は液晶表示パネル等から構成されており、カーナビゲーション装置の種々の情報を表示する。
地図情報記憶部6は、全国の道路や地域の道路を記憶しており、予めCD−ROM、DVD、メモリカード等が記憶された記憶媒体から構成しても良く、これら記録媒体にインターネット上のサーバから地図情報を取得しても良い。音声出力部7はスピーカ等から構成されており、カーナビゲーション装置の種々の情報を音声により通知する。本実施の形態では、地図情報記憶部6が地図情報取得手段を構成している。
また、コントローラ1は、推奨経路算出部11、出口番号判定部12、ラウンドアバウトレーン数判定部13、進入路レーン数判定部14、信号機有無判定部15および誘導情報通知部16を含んで構成される。
推奨経路算出部11は、GPS受信機2および自律航法センサ3から取得した現在位置情報を地図情報記憶部6から読み出して自車位置周辺の地図情報に合成して表示部5に表示するとともに、自車の現在位置から入力部4から入力された目的地までの推奨経路を算出するようになっている。本実施の推奨経路算出部11が推奨経路算出手段を構成している。
出口番号判定部12は、推奨経路算出部11により推奨経路にラウンドアバウトが含まれている場合に、ラウンドアバウトの出口の方位を検出するとともに出口番号を判定するようになっており、方位検出手段を構成している。
ラウンドアバウトレーン数判定部13は、地図情報記憶部6から取得した地図情報に基づいてラウンドアバウトの進入道路から出口までの走行レーンの数を検出するようになっており、走行レーン数検出手段を構成している。
進入路レーン数判定部14は、地図情報記憶部6から取得した地図情報に基づいてラウンドアバウトの進入路の走行レーン数を検出するようになっており、進入路レーン数検出手段を構成している。
信号機有無判定部15は、地図情報記憶部6から取得した地図情報、あるいは信号機から送信される信号機通知信号に基づいてラウンドアバウトの進入路における信号の有無を検出するようになっており、信号機検出手段を構成している。
誘導情報通知部16は、ラウンドアバウトレーン数判定部13の判定結果に基づいてラウンドアバウトの進入道路から出口までの走行レーン位置を通知するように表示部5および音声出力部7を制御する。
また、誘導情報通知部16は、進入路の走行レーン数をラウンドアバウトレーン数判定部13によって判定されたレーン数に加味してラウンドアバウトの進入道路から出口までの走行レーン位置を通知するように表示部5および音声出力部7を制御する。
さらに、誘導情報通知部16は、信号機の有無をラウンドアバウトレーン数判定部13によって判定された走行レーン数あるいは進入路レーン数判定部14によって判定された進入路レーン数の少なくとも一方の情報を加味してラウンドアバウトの進入道路から出口までの走行レーン位置を通知するように表示部5および音声出力部7を制御する。本実施の形態では、誘導情報通知部16が通知手段を構成している。
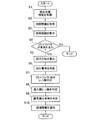
次に、図2のフローチャートに基づいてラウンドアバウトレーンの走行方法を説明する。図2はコントローラ1によって実行されるラウンドアバウトレーン走行処理プログラムである。
図2において、まず、GPS受信機2および自律航法センサ3から現在位置情報を取得した後(ステップS1)、地図情報記憶部6から地図情報を取得する(ステップS2)。
次いで、推奨経路算出部11によって自車位置周辺の地図情報に自車の現在位置を合成して表示部5に表示するとともに、自車の現在位置から入力部4から入力された目的地までの推奨経路を算出する(ステップS3)。
次いで、推奨経路算出部11により推奨経路にラウンドアバウトが含まれているか否かを判別し(ステップS4)、含まれていない場合には今回の処理を終了して通常のナビゲーション処理を実行する。
ステップS4でラウンドアバウトが含まれている場合には、出口番号判定部12によって出口の方位を算出した後(ステップS5)、その出口番号を判定する(ステップS6)。次いで、ラウンドアバウトレーン数判定部13によってラウンドアバウトレーンの進入路から出口までの走行レーン数を判定した後(ステップS7)、進入路レーン数判定部14によってラウンドアバウトレーンの進入路の走行レーン数を判定する(ステップS8)。
次いで、信号機有無判定部15によってラウンドアバウトレーンの進入路の信号機の有無を判定した後(ステップS9)、誘導情報通知部16によってラウンドアバウトの進入路から出口までの走行レーンを通知し、この走行レーン情報を表示部で表示したり、音声出力部7から音声で通知する。
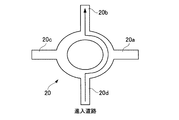
図3は出口の方位に加えてラウンドアバウト内のレーン数を判定したときの誘導情報の通知例である。図3では、ラウンドアバウト20の走行レーン数が1つの場合には、出口の方位が右方向20a、直進方向20b、左方向20cの何れの方向であっても、内周走行、外周走行の指示は行わない。
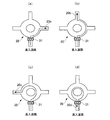
また、図4に示すように、ラウンドアバウト20の走行レーン数が2つ以上の場合には、出口の方位が図4(a)に示すように右方向20a、図4(b)に示すように直進方向20bの場合には外周走行を通知し、出口の方位が図4(c)に示すように左方向20c、図4(d)に示すようにUターン方向20dの場合には内周走行を指示する。
また、ラウンドアバウトの進入路のレーン数を判定したときの誘導情報を通知する場合、ラウンドアバウトの走行レーン数が1つの場合に、出口の方位が右方向、直進方向、左方向、Uターン方向いずれの場合でも内周走行、外周走行の指示は行わない。
一方、図5に示すように、ラウンドアバウトの進入路20dの走行レーン数が2つ以上の場合、出口の方位が図5(a)に示すように右方向20a、図5(b)に示すように直進方向20bの場合には、進入路右レーン走行およびラウンドアバウト外周走行を通知し、出口の方位が図5(c)に示すように左方向20c、Uターン方向20dの場合には、進入路左レーン走行およびラウンドアバウト内周走行を通知する。
また、ラウンドアバウトの進入路の信号機の有無を判定したときの誘導情報を通知する場合、信号機が無い場合には上記の案内方法に準じる。また、図6に示すように進入路20dに信号機31がある場合、出口の方位が図6(a)に示すように右方向20a、図6(b)に示すように直進方向20bの場合には外周走行を通知し、出口の方位が図6(c)に示すように左方向20c、図6(d)に示すようにターン方向20dの場合には内周走行を通知する。
このように本実施の形態では、ラウンドアバウト20の進入道路から出口までの走行レーンの数に応じてラウンドアバウト20の進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト20内の走行レーンを間違えずに効率的にラウンドアバウト20内を走行することができ、正しい出口を確実に通知することができる。
また、ラウンドアバウト20の進入道路の走行レーンの数を加味してラウンドアバウト20の進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト20内の走行レーンを間違えずにより一層効率的にラウンドアバウト20内を走行することができ、正しい出口を確実に通知することができる。
また、ラウンドアバウト20の進入道路20dの信号機31の有無を加味してラウンドアバウト20の進入道路から出口までの走行レーン位置を通知するので、ラウンドアバウト20内の走行レーンを間違えずにより一層効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができる。
なお、本実施の形態では、ラウンドアバウトが左回りのときの例を示しているが、当然、右回りでも同様に動作させても良い。
以上のように、本発明に係るナビゲーション装置は、ラウンドアバウト内の走行レーンを間違えずに効率的にラウンドアバウト内を走行することができ、正しい出口を確実に通知することができるという効果を有し、車両に搭載され、目的地までの案内道路に含まれたラウンドアバウトに対する特有な経路案内機能を備えたナビゲーション装置等として有用である。
2 GPS受信機(現在位置取得手段)
3 自律航法センサ(現在位置取得手段)
6 地図情報記憶部(地図情報取得手段)
11 推奨経路算出部(推奨経路算出手段)
12 出口番号判定部(方位検出手段)
13 ラウンドアバウトレーン数判定部(レーン数検出手段)
14 進入路レーン数判定部(進入路レーン数検出手段)
15 信号機有無判定部(信号機検出手段)
16 誘導情報通知部(通知手段)
3 自律航法センサ(現在位置取得手段)
6 地図情報記憶部(地図情報取得手段)
11 推奨経路算出部(推奨経路算出手段)
12 出口番号判定部(方位検出手段)
13 ラウンドアバウトレーン数判定部(レーン数検出手段)
14 進入路レーン数判定部(進入路レーン数検出手段)
15 信号機有無判定部(信号機検出手段)
16 誘導情報通知部(通知手段)
Claims (3)
- 地図情報を取得する地図情報取得手段と、移動体の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの推奨経路を算出する推奨経路算出手段と、前記推奨経路にラウンドアバウトが含まれている場合に、前記ラウンドアバウトの出口の方位を検出する方位検出手段と、前記ラウンドアバウトの進入道路から前記出口までの走行レーンの数を検出する走行レーン数検出手段と、前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知する通知手段とを備えたことを特徴とするナビゲーション装置。
- 前記ラウンドアバウトの進入路の走行レーン数を検出する進入路レーン数検出手段を有し、前記通知手段は、前記進入路の走行レーン数を加味して前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知することを特徴とする請求項1に記載のナビゲーション装置。
- 前記ラウンドアバウトの進入路における信号機の有無を検出する信号機検出手段を有し、前記通知手段は、前記信号機の有無を加味して前記ラウンドアバウトの進入道路から前記出口までの走行レーン位置を通知することを特徴とする請求項1または請求項2に記載のナビゲーション装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110155A JP2005292040A (ja) | 2004-04-02 | 2004-04-02 | ナビゲーション装置 |
| PCT/JP2005/002757 WO2005098363A1 (ja) | 2004-04-02 | 2005-02-22 | ナビゲーション装置 |
| EP05710488A EP1731875A4 (en) | 2004-04-02 | 2005-02-22 | Navigation system |
| CNA2005800074112A CN1930449A (zh) | 2004-04-02 | 2005-02-22 | 导航装置 |
| US10/594,484 US20070150182A1 (en) | 2004-04-02 | 2005-02-22 | Navigation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110155A JP2005292040A (ja) | 2004-04-02 | 2004-04-02 | ナビゲーション装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292040A true JP2005292040A (ja) | 2005-10-20 |
Family
ID=35125181
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004110155A Withdrawn JP2005292040A (ja) | 2004-04-02 | 2004-04-02 | ナビゲーション装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20070150182A1 (ja) |
| EP (1) | EP1731875A4 (ja) |
| JP (1) | JP2005292040A (ja) |
| CN (1) | CN1930449A (ja) |
| WO (1) | WO2005098363A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019058414A1 (ja) * | 2017-09-19 | 2019-03-28 | 三菱電機株式会社 | 表示制御装置および表示制御方法 |
| KR20210031724A (ko) * | 2018-07-11 | 2021-03-22 | 르노 에스.아.에스. | 주행 지원 방법 및 주행 지원 장치 |
| US11493356B2 (en) | 2017-06-26 | 2022-11-08 | Nissan Motor Co., Ltd. | Direction indicator control method and direction indicator control device |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005012269B4 (de) * | 2005-03-17 | 2013-05-16 | Robert Bosch Gmbh | Verfahren und Anordnung zur Führung eines Fahrzeugs sowie ein entsprechendes Computerprogramm und ein entsprechendes computerlesbares Speichermedium |
| JP4506642B2 (ja) * | 2005-10-31 | 2010-07-21 | 株式会社デンソー | 経路案内装置 |
| EP2631596B1 (en) * | 2012-02-22 | 2019-04-03 | Harman Becker Automotive Systems GmbH | Navigation method and corresponding navigation system |
| JP6802778B2 (ja) * | 2017-12-01 | 2020-12-23 | 本田技研工業株式会社 | 車両、経路算出装置及び経路算出方法 |
| CN111243313B (zh) * | 2018-11-29 | 2022-07-26 | 沈阳美行科技股份有限公司 | 一种环岛导航方法、装置、终端设备及存储介质 |
| FR3093690B1 (fr) | 2019-03-14 | 2021-02-19 | Renault Sas | Procédé de sélection pour un véhicule automobile d’une voie de circulation d’un rond-point |
| US12080164B2 (en) | 2022-10-27 | 2024-09-03 | Woven By Toyota, Inc. | Systems and methods for assisting a vehicle driver at a roundabout |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3220408B2 (ja) * | 1997-03-31 | 2001-10-22 | 富士通テン株式会社 | 経路案内装置 |
| DE69841314D1 (de) * | 1998-06-12 | 2010-01-07 | Mitsubishi Electric Corp | Navigationsvorrichtung |
| JP3455153B2 (ja) * | 2000-02-16 | 2003-10-14 | 松下電器産業株式会社 | 交差点における車線誘導案内表示方法およびそのナビゲーション装置並びに記録媒体 |
| JP3898872B2 (ja) * | 2000-05-26 | 2007-03-28 | アルパイン株式会社 | ナビゲーション装置 |
| JP2002202146A (ja) * | 2000-12-28 | 2002-07-19 | Aisin Aw Co Ltd | ナビゲーション装置 |
| US9341485B1 (en) * | 2003-06-19 | 2016-05-17 | Here Global B.V. | Method and apparatus for representing road intersections |
| WO2006109471A1 (ja) * | 2005-03-31 | 2006-10-19 | Pioneer Corporation | ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラムおよびコンピュータに読み取り可能な記録媒体 |
-
2004
- 2004-04-02 JP JP2004110155A patent/JP2005292040A/ja not_active Withdrawn
-
2005
- 2005-02-22 US US10/594,484 patent/US20070150182A1/en not_active Abandoned
- 2005-02-22 EP EP05710488A patent/EP1731875A4/en not_active Withdrawn
- 2005-02-22 CN CNA2005800074112A patent/CN1930449A/zh not_active Withdrawn
- 2005-02-22 WO PCT/JP2005/002757 patent/WO2005098363A1/ja not_active Ceased
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11493356B2 (en) | 2017-06-26 | 2022-11-08 | Nissan Motor Co., Ltd. | Direction indicator control method and direction indicator control device |
| WO2019058414A1 (ja) * | 2017-09-19 | 2019-03-28 | 三菱電機株式会社 | 表示制御装置および表示制御方法 |
| KR20210031724A (ko) * | 2018-07-11 | 2021-03-22 | 르노 에스.아.에스. | 주행 지원 방법 및 주행 지원 장치 |
| KR102611934B1 (ko) * | 2018-07-11 | 2023-12-08 | 르노 에스.아.에스. | 주행 지원 방법 및 주행 지원 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070150182A1 (en) | 2007-06-28 |
| EP1731875A4 (en) | 2008-01-02 |
| EP1731875A1 (en) | 2006-12-13 |
| WO2005098363A1 (ja) | 2005-10-20 |
| CN1930449A (zh) | 2007-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4861850B2 (ja) | レーン判定装置及びレーン判定方法 | |
| JP6728558B2 (ja) | 自動運転制御装置および自動運転制御方法 | |
| US9076334B2 (en) | Navigation system and navigation method | |
| JP2010257086A (ja) | 運転支援装置、運転支援方法及び運転支援プログラム | |
| JP2008026118A (ja) | 運転支援装置及び車両用ナビゲーション装置 | |
| JP2006053109A (ja) | 車両用ナビゲーション装置及び車両用ナビゲーション装置の経路案内方法 | |
| JP2005292040A (ja) | ナビゲーション装置 | |
| JP2009008646A (ja) | 車載ナビゲーション装置 | |
| KR100456055B1 (ko) | 자동차 네비게이션용 차선 안내 방법 | |
| JP3098623B2 (ja) | 車両用経路誘導装置 | |
| JP2008197703A (ja) | 車両の情報提供装置 | |
| JP3197345B2 (ja) | 車両用経路誘導装置 | |
| JP2015075891A (ja) | 車両支援装置 | |
| JP2006258548A (ja) | 車両用ナビゲーション装置 | |
| JP3093041B2 (ja) | 車両用経路誘導装置 | |
| JP2009252062A (ja) | 車両運転支援システムおよび車両運転支援方法 | |
| JP4193742B2 (ja) | カーナビゲーション装置 | |
| JPH0566131A (ja) | 音声案内装置 | |
| JP4089541B2 (ja) | 車両走行支援装置 | |
| JP3666698B2 (ja) | ナビゲーション装置 | |
| JP2011220688A (ja) | 車載ナビゲーション装置 | |
| JP2001289649A (ja) | ナビゲーションシステム | |
| JP4949974B2 (ja) | 地物情報提供装置及び方法等 | |
| JP2008134458A (ja) | 認知地図形成補助装置 | |
| JP4463540B2 (ja) | 車載用ナビゲーション装置及び交通情報表示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060629 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20080515 |