JP2005140780A - 圧力センサー - Google Patents
圧力センサー Download PDFInfo
- Publication number
- JP2005140780A JP2005140780A JP2004319535A JP2004319535A JP2005140780A JP 2005140780 A JP2005140780 A JP 2005140780A JP 2004319535 A JP2004319535 A JP 2004319535A JP 2004319535 A JP2004319535 A JP 2004319535A JP 2005140780 A JP2005140780 A JP 2005140780A
- Authority
- JP
- Japan
- Prior art keywords
- pressure sensor
- thin film
- support base
- sensor according
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/0001—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means
- G01L9/0008—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means using vibrations
- G01L9/0016—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means using vibrations of a diaphragm
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L21/00—Vacuum gauges
- G01L21/16—Vacuum gauges by measuring variation of frictional resistance of gases
- G01L21/22—Vacuum gauges by measuring variation of frictional resistance of gases using resonance effects of a vibrating body; Vacuum gauges of the Klumb type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/0001—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means
- G01L9/0008—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means using vibrations
- G01L9/0019—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means using vibrations of a semiconductive element
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measuring Fluid Pressure (AREA)
- Pressure Sensors (AREA)
Abstract
【解決手段】圧力センサーはマイクロ電気機械振動デバイスであり、単一の層または多層の振動アセンブリ121がその上に形成されているシリコン基板15を有する。この圧力センサーは、共振振動数、または別の既知の振動数で基板に対して該アセンブリを振動させる電極21と、前記振動の実際の振動数および/または振幅を検知するための検知器とを含む。実際の振動数および/または振幅は、条件、特に外的環境の圧力によって影響され、電極によってセットされた値に関する振動数および振幅の変動が、周囲の環境の圧力変動を測定するために使用される。
【選択図】図1a
Description
上記の種類のセンサーは、下記特許文献1、「光学センシングシステム」、下記特許文献2、「振動センサー」、および下記特許文献3、「振動性トランスデューサー」に開示されている。
本発明によれば、本マイクロ電気機械振動デバイスの振動数および/または振幅の変動を、周辺環境中の圧力変化の測定用に利用することができる。
図1aおよび図1bを参照する。ここには本発明による圧力センサーのマイクロ電気機械デバイスの第1の実施形態を示す。
本実施形態によれば、支持ベース15に形成されているキャビティ13の上に、弾性を有し振動する平坦な薄膜121が支持されている。この薄膜121は、実質上長方形をしており、支持ベース15内のキャビティ13を取り囲む周辺リム17に、薄膜121の短辺に隣接する2つの長方形の固定領域123a、123bで固定されている。この薄膜はさらに、周辺リム17を部分的に覆う側面拡張部分125を有し、対応する接触域127を画定している。
絶対真空条件の下では、薄膜121はその共振振動数と振幅とで振動するか、または、その信号が前記共振振動数とは異なる周波数の正弦波信号である場合には、薄膜121はその信号によって課された周波数で振動することになるであろう。
したがって、薄膜121の振動数および/または振幅の期待値からの偏差を、適切な検出器を用いて測定すれば、周辺環境中の圧力変化を得ることができる。
薄膜121を製造するために適している材料は、アルミニウム、モリブデン、SiO2、Si3N4、Si(単結晶)であってもよい。さらに、SiO2やSi3N4等の誘電材料で作られている薄膜は、金属層が2つの誘電体層の間にはさまれたサンドイッチ構造(誘電体−金属−誘電体)を有し、このようにして電界によって薄膜振動を制御することができるようになる。
さらに、薄膜121は、この薄膜が振動している間にベース15から分離してしまうのを防ぐために十分に広い固定領域123a、123bを有するものとする。たとえば、100μm×20μm×1μmの薄膜の場合には、固定領域は、少なくとも20μm×20μmの表面を有するのが好ましい。
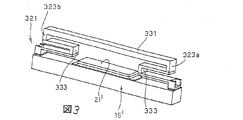
図3に移る。ここでは、多層の振動アセンブリ321が提供される本発明の第3の実施形態を示す。
この実施形態によれば、アセンブリ321は、実質的に剛体の薄膜331を備えている。薄膜331は、その下でそれぞれの反対側の両端323a、323bに位置する実質上S形の弾性を有する部材すなわちサスペンションスプリング333に支持されている。
図4に移る。ここでは本発明の第4の実施形態を示す。薄膜331は、複数の開口部329を有していることが好ましく、これによって、薄膜に対して充分な剛性が得られる格子構造を与える。このようにすることによって、この薄膜がアイドル状態のときに存在する平面と実質上平行に振動するようになる。
実際に、薄膜331は振動中に実質上平坦な状態を保持し、したがって、膜表面の全体がガス原子または分子の存在によって等しく影響されるようになる。
薄膜厚さ:1μm
振動表面の長さ:15μm〜25μm
スプリング長さ:2μm〜3μm
アセンブリ厚さ:5μm
スプリング厚さ:0.5μm。
この電気回路では、マイクロ電気機械デバイスの振動アセンブリをMOSFETトランジスタのゲートGとして使用する。
知られているように、たとえばN−チャネルタイプのMOSFETトランジスタは、低度にドープしたPシリコン基板を含み、そこに高度にドープした2つのN領域(ソースSおよびドレインDと呼ばれる)が形成されている。制御電極(いわゆるゲートG)はこれらの領域の間に配置されている。ゲートGに印加する電圧を変動させることによって、ソースSとドレインDとの間の下層をなす基板領域の電荷分布および密度が、電界効果によって変動し、その結果としていわゆるチャネルを形成する。上述のケースでは、P型の基板であり、このチャネルはN型になり、すなわち、これによって、電子が流れることが可能になる。N型基板の場合には、ゲートGの電位によって作られたチャネルによって、正孔電流が流れる(P型チャネル)ことが可能になることになる。
マイクロ電気機械デバイスの振動アセンブリがゲートGとして使用され、前記アセンブリが定電圧VGでバイアスされている場合、振動アセンブリの振動の振幅および振動数に依存して、ゲートチャネル拡張部が変動するので、一定のd.c.信号および周波数信号の重ね合せから結果的に得られる電圧信号が得られるであろう。
電流IDは、以下の関係式、

また、以下の関係式によって変動するであろう。
ここに、WとLとは薄膜の(一定の)幾何学的なディメンションである。
μhoは相互コンダクタンスパラメーターである。
toxは、振動する構造体と下層をなす支持ベースとの間の距離である。
εrは、前記構造体と前記ベースとの間の媒体の誘電率(比誘電率)(真空中では、εr=1)である。
VGSはゲートとソースとの間の電位差(VG−VS)である。
VTは閾値電位であり、この値を超えるとソースとドレインとの間の可動な電荷の存在が可能となるVGS値に相当する。すなわちこの値を超える領域では、チャネルは開いているということである。VTは、toxの関数である。
λはチャネル長さ変調である。
VDSはドレインとソースとの間の電位差(VD−VS)である。
VDS(sat)はVDSの飽和値である。すなわち、この値の上では電流IDはVDSと無関係になり、単にVGSおよびVTに依存するようになるVDS値である。
出力信号は、たとえばVextとすることができ、電流変動を測定することによって得ることができる。マイクロ電気機械振動アセンブリの振動の振動数および/または振幅の変動を得ることができ、この変動から、前記アセンブリを取り巻く環境中の圧力変化を得ることができる。
このような異なる実施形態において、前記アセンブリは、第1のMOSFET M1のゲートG1を形成している。前記第1のMOSFET M1のソースS1は、第1のMOSFETと同等ではあるが非可変ゲートG2を有する第2のMOSFET M2(並列接続)のソースS2に接続されている。前記MOSFETのドレインD1、D2は、第3および第4のMOSFET M3、M4のソースS3、S4とそれぞれ接続(直列接続)されている。前記第3および第4のMOSFET M3、M4は互いに同等品であり、この回路をより安定させるための安定化抵抗として働く。
Claims (20)
- マイクロ電気機械デバイスを含む振動アセンブリ(121、221、321)と、
前記振動アセンブリに固定された静止している支持ベース(15、15’)と、
電極(21、21’)であって、この電極と前記振動アセンブリとの間で可変的な電界が形成されるときに所定の振動数および振幅で前記支持ベースに対して前記振動アセンブリを振動させる電極と、
前記既知の振動数および振幅からの振動の振動数および振幅の偏差を検知するデバイスであって、このデバイスがMOSFETトランジスタ(M、M1)を有する電気回路を含み、前記振動アセンブリが制御電極である前記MOSFETトランジスタのゲート(G)をなし、このゲートが前記所定振動数および振幅の値に依存するチャネルの幅を制御するデバイスとを含む高真空用圧力センサー。 - 前記支持ベース(15、15’)がシリコンウェーハを含む請求項1に記載の圧力センサー。
- 前記電極(21)が、前記支持ベース(15、15’)と前記マイクロ電気機械デバイスの前記振動アセンブリ(121、221、321)との間に配置されている請求項2に記載の圧力センサー。
- 前記可変的な電界が前記振動アセンブリの共振振動数に等しい振動数を有する正弦波の電界である請求項1に記載の圧力センサー。
- 前記電極がキャビティ(13)内に配置されており、このキャビティは前記振動アセンブリの下の前記支持ベースの中に形成されている請求項1に記載の圧力センサー。
- 前記振動アセンブリが弾性を有する平坦な薄膜である請求項1に記載の圧力センサー。
- 前記薄膜が、実質的に長方形であり、この長方形の短辺に対応するその端(123a、123b)で前記支持ベースに固定されている請求項6に記載の圧力センサー。
- 前記薄膜が実質的にH形をしており、その4つの端(223a、223b)で前記支持ベースに固定されている請求項6に記載の圧力センサー。
- 前記H形の薄膜がねじり振動を受ける請求項8に記載の圧力センサー。
- 前記薄膜が、前記キャビティ(13)を取り囲む周辺リム(17)に沿って前記支持ベースに固定されており、前記キャビティ上に支持されている請求項9に記載の圧力センサー。
- 前記薄膜が、対応する第1の接触域(127)を画定する前記周辺リムを部分的に覆う側面拡張部分(125)を含む請求項10に記載の圧力センサー。
- 前記電極は、この電極が、対応する第2の接触領域(27)を画定する前記支持ベース(15)の周辺リム(17)を部分的に覆い、前記振動アセンブリと前記電極との間に可変的な電界を形成する前記第2接触領域に適切な電圧信号が印加されるような側面拡張部分(23)を含む請求項10に記載の圧力センサー。
- 前記振動アセンブリが、前記薄膜と前記支持ベースとの間に配置されている弾性を有する部材であるサスペンションスプリング(333)に支持された剛体的な薄膜(331)を含み、前記弾性を有する部材が前記支持ベースに固定されている請求項1に記載の圧力センサー。
- 前記薄膜および前記支持ベースが実質的に直線状であり平行六面体状の形態を有する請求項13に記載の圧力センサー。
- 前記弾性を有する部材がS形である請求項14に記載の圧力センサー。
- 前記薄膜が開口部(329)を有する格子構造を有する請求項14に記載の圧力センサー。
- 前記MOSFETトランジスタ(M1)の前記ゲート(G1)が第2のMOSFETトランジスタ(M2)に平列に接続されている請求項1に記載の圧力センサー。
- 前記第2のMOSFETトランジスタ(M2)が、それが静止ゲート(G2)を含む場合以外は、前記第1のMOSFETトランジスタ(M1)に類似するものである請求項17に記載の圧力センサー。
- 前記第1および前記第2のMOSFETトランジスタ(M1、M2)が第3および第4のMOSFETトランジスタ(M3、M4)、前記第3および第4のMOSFETトランジスタとそれぞれ直列に接続されている請求項18に記載の圧力センサー。
- 前記第3および第4のMOSFETトランジスタが互いに同等のものである請求項19に記載の圧力センサー。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP03425724A EP1530036B1 (en) | 2003-11-07 | 2003-11-07 | Pressure sensor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005140780A true JP2005140780A (ja) | 2005-06-02 |
Family
ID=34429638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004319535A Pending JP2005140780A (ja) | 2003-11-07 | 2004-11-02 | 圧力センサー |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7059192B2 (ja) |
| EP (2) | EP1808685B1 (ja) |
| JP (1) | JP2005140780A (ja) |
| DE (2) | DE60330919D1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1808685B1 (en) | 2003-11-07 | 2010-01-06 | VARIAN S.p.A. | Pressure sensor with vibrating member |
| ITTO20050316A1 (it) * | 2005-05-10 | 2006-11-11 | Varian Spa | Sensore di pressione |
| US20070236213A1 (en) * | 2006-03-30 | 2007-10-11 | Paden Bradley E | Telemetry method and apparatus using magnetically-driven mems resonant structure |
| EP2309241B1 (en) * | 2009-10-07 | 2016-11-30 | ams international AG | MEMS pressure sensor |
| US9625366B2 (en) | 2013-11-11 | 2017-04-18 | 3R Valo, société en commandite | Microwave resonator sensor and associated methods of sensing |
| US9796585B2 (en) * | 2015-12-17 | 2017-10-24 | Texas Instruments Incorporated | Leak detection using cavity surface quality factor |
| WO2023107420A1 (en) * | 2021-12-06 | 2023-06-15 | Trustees Of Tufts College | Pressure sensitive transistor gated with deep eutectic solvent gel |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03148878A (ja) * | 1989-05-30 | 1991-06-25 | Schlumberger Ind Inc | 電子機器センサ |
| JPH0730128A (ja) * | 1993-07-08 | 1995-01-31 | Yokogawa Electric Corp | 振動式トランスデューサとその製造方法 |
| JPH07333077A (ja) * | 1994-06-10 | 1995-12-22 | Fujitsu Ltd | 振動素子、振動素子の使用方法及び振動素子の製造方法 |
| JPH10293077A (ja) * | 1997-04-18 | 1998-11-04 | Nikon Corp | 広範囲圧力計 |
| JP2000108099A (ja) * | 1998-09-29 | 2000-04-18 | Siemens Ag | 変位測定用マイクロマシンセンサ |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6263828A (ja) * | 1985-09-06 | 1987-03-20 | Yokogawa Electric Corp | 振動式トランスジューサ |
| EP0221467B1 (en) * | 1985-10-25 | 1990-08-01 | Fuji Electric Co., Ltd. | Vibrating type transducer |
| GB8929328D0 (en) * | 1989-12-29 | 1990-02-28 | Schlumberger Ind Ltd | Optical sensing systems |
| GB9105799D0 (en) * | 1991-03-19 | 1991-06-12 | Lucas Ind Plc | Vibrating sensor |
| US5550516A (en) * | 1994-12-16 | 1996-08-27 | Honeywell Inc. | Integrated resonant microbeam sensor and transistor oscillator |
| US5528939A (en) * | 1995-03-21 | 1996-06-25 | Martin; Jacob H. | Micromechanical pressure gauge having extended sensor range |
| DE19648424C1 (de) * | 1996-11-22 | 1998-06-25 | Siemens Ag | Mikromechanischer Sensor |
| US5939635A (en) * | 1997-12-02 | 1999-08-17 | Varian Inc. | Micromechanical pressure sensor-with improved range |
| EP1026492A3 (de) | 1999-02-01 | 2000-09-06 | Baumer Electric Ag | Drahtlose Drehmoment-Messeinrichtung und Sensor für dieselbe |
| US6497141B1 (en) * | 1999-06-07 | 2002-12-24 | Cornell Research Foundation Inc. | Parametric resonance in microelectromechanical structures |
| US6532822B1 (en) * | 2000-09-26 | 2003-03-18 | Clark Davis Boyd | Resonant torsion pendulum pressure sensor |
| WO2003038381A1 (en) * | 2001-10-30 | 2003-05-08 | Board Of Trustees Of Michigan State University | Oscillating hot wire or hot film flow sensor |
| EP1808685B1 (en) | 2003-11-07 | 2010-01-06 | VARIAN S.p.A. | Pressure sensor with vibrating member |
-
2003
- 2003-11-07 EP EP07105760A patent/EP1808685B1/en not_active Expired - Fee Related
- 2003-11-07 DE DE60330919T patent/DE60330919D1/de not_active Expired - Lifetime
- 2003-11-07 EP EP03425724A patent/EP1530036B1/en not_active Expired - Fee Related
- 2003-11-07 DE DE60313327T patent/DE60313327T2/de not_active Expired - Lifetime
-
2004
- 2004-10-22 US US10/971,885 patent/US7059192B2/en not_active Expired - Fee Related
- 2004-11-02 JP JP2004319535A patent/JP2005140780A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03148878A (ja) * | 1989-05-30 | 1991-06-25 | Schlumberger Ind Inc | 電子機器センサ |
| JPH0730128A (ja) * | 1993-07-08 | 1995-01-31 | Yokogawa Electric Corp | 振動式トランスデューサとその製造方法 |
| JPH07333077A (ja) * | 1994-06-10 | 1995-12-22 | Fujitsu Ltd | 振動素子、振動素子の使用方法及び振動素子の製造方法 |
| JPH10293077A (ja) * | 1997-04-18 | 1998-11-04 | Nikon Corp | 広範囲圧力計 |
| JP2000108099A (ja) * | 1998-09-29 | 2000-04-18 | Siemens Ag | 変位測定用マイクロマシンセンサ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1530036A1 (en) | 2005-05-11 |
| US7059192B2 (en) | 2006-06-13 |
| EP1530036B1 (en) | 2007-04-18 |
| DE60330919D1 (de) | 2010-02-25 |
| EP1808685B1 (en) | 2010-01-06 |
| DE60313327D1 (de) | 2007-05-31 |
| EP1808685A3 (en) | 2008-11-12 |
| EP1808685A2 (en) | 2007-07-18 |
| DE60313327T2 (de) | 2007-12-27 |
| US20050126295A1 (en) | 2005-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8407905B1 (en) | Multiple magneto meters using Lorentz force for integrated systems | |
| US7382205B2 (en) | Transducer and electronic device | |
| CN102032970B (zh) | Mems压力传感器 | |
| US8733176B2 (en) | MEMS stress concentrating structure for MEMS sensors | |
| JP2008211420A (ja) | 発振器 | |
| EP1763675A1 (en) | Method for calibrating accelerometer sensitivity | |
| JPH08148698A (ja) | 半導体ヨーレートセンサおよびその製造方法 | |
| CN106062524B (zh) | 压力传感器 | |
| US11274983B2 (en) | Electromechanical pressure sensor | |
| US20120105173A1 (en) | MEMS Device | |
| JP2005140780A (ja) | 圧力センサー | |
| JP2006322935A (ja) | 圧力センサー | |
| JP4737535B2 (ja) | コンデンサマイクロホン | |
| JP5578176B2 (ja) | 物理量センサ | |
| JP2007101316A (ja) | ガスセンサ及びガス濃度検出装置 | |
| CN112088483B (zh) | 静电致动器及物理量传感器 | |
| US7083398B2 (en) | Vibrating pumping stage for molecular vacuum pumps, and molecular vacuum pump with vibrating pumping stages | |
| JP4320934B2 (ja) | 半導体角速度センサ | |
| JP2009097951A (ja) | 温度センサ | |
| JP2005090971A (ja) | 磁気センサ | |
| KR101273303B1 (ko) | 열 효과를 이용한 마이크로 역학 진동자 기반의 압력센서 및 이를 이용한 압력 측정 방법 | |
| CN108088474B (zh) | 振动式转换器 | |
| Kim et al. | Capacitive resonant mass sensor with LC resonant circuit for use in atmosphere | |
| JP2009229362A (ja) | 加速度検知ユニット、及び圧電サーボ式加速度センサ | |
| KR100880212B1 (ko) | 자이로 센서 및 이를 이용하는 센서 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101125 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110224 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110325 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20110509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110901 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120209 |