JP2005125478A - 複数ロボット間の相対位置計測方法 - Google Patents
複数ロボット間の相対位置計測方法 Download PDFInfo
- Publication number
- JP2005125478A JP2005125478A JP2004027745A JP2004027745A JP2005125478A JP 2005125478 A JP2005125478 A JP 2005125478A JP 2004027745 A JP2004027745 A JP 2004027745A JP 2004027745 A JP2004027745 A JP 2004027745A JP 2005125478 A JP2005125478 A JP 2005125478A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- robots
- distance
- relative position
- feature point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Abstract
【解決手段】複数のロボットの可動部の特徴点を少なくとも3本の直線301上で動作させて、各直線301上の少なくとも2点302a,302bにおける前記特徴点のロボット座標値303a,303bを測定するとともに、各直線301上の特定点0cから前記特徴点までの距離または距離と相関関係を持つ物理量を測定し、各直線・各ロボットについて得られた測定値を基に複数ロボット間の相対位置関係を計算するものである。
【選択図】図4
Description
このように複数台のロボットが協調作業する際には、ロボット間の相対位置関係(ロボットベース座標同士の位置と姿勢)を予め取得し、ロボットの制御装置にその相対位置関係を設定しておく必要がある。このための相対位置を求める方法が各種提案されている。
例えば、特許文献1には、一方のロボットの回転部上の1点に対して他方のロボットのツール先端を突き合わせ、その時の教示データを求めることを、前記回転部の角度を違えて3回繰り返して得られた、3通りの教示データに基づいて、前記他方のロボットの座標系からみた前記一方のロボットの座標系の相対位置を求める方法が開示されている。
また、特許文献2には、一方のロボットの手首フランジに力覚センサと面状ツールを取り付け、他方のロボットの手首フランジに針状ツールを取り付け、直線上にない3点において面状ツールと針状ツールを接触させて、一方のロボットのベース座標系における各接触点の位置と、他方のロボットのベース座標系における針状ツールの位置により、ロボット間の相対位置を求める方法が開示されている。
また、非特許文献1には、2台のロボットのツール先端にマーカを取り付け、適当な場所に2台のカメラを配置し、各々のロボットを動かしたときの複数の異なるマーカ位置を2台のカメラで測定することによって、ロボット間の相対位置関係を計算する方式が提案されている。この方式は、基本的にはカメラのステレオ視の原理(非特許文献2の第4章参照)を利用している。
非特許文献1の方式は、カメラによりマーカを観測するのでロボットのツール先端同士を突き合わせる必要がないという利点があるが、ステレオ視の原理に基づいているので2台のカメラが必要になり、測定装置のコストが増加するという問題がある。また、カメラパラメータの同定(キャリブレーション)が必要になるという問題もある。
本発明はこのような問題点に鑑みてなされたものであり、ロボットのツール先端同士を突き合わせる必要がないとともに、測定装置のパラメータの同定が不要で、さらに測定装置のコストが小さい複数ロボット間の相対位置計測システムを提供することを目的とする。
また、請求項7〜9に記載の発明によると、レーザ距離センサのレーザ光線がロボットツール上ターゲットの特徴点に照射されるようにロボットを動かすことによって特徴点を直線上に拘束することができ、また、レーザ距離センサを利用して直接ターゲットまでの距離を測定することができるので、ロボットツールの先端同士を突き合わせることなくロボット間の相対位置関係を正確に計測できる。
また、請求項10〜11に記載の発明によると、細長い棒状ジグを利用してロボットツールの特徴点を直線上に拘束するので、ロボットツールの先端同士を突き合わせることなくロボット間の相対位置関係を手軽に計測できる。
また、請求項12〜14に記載の発明によると、カメラ1台の撮像平面の基準点にロボットツール上マーカの特徴点が一致するようにロボットを動かし、さらに予め設定した平面上に特徴点が拘束されるようにロボットを動かすことによって、各平面と各直線との交点に特徴点を位置決めし、そこでの特徴点のロボット座標値を測定することによって、ロボット座標値だけを使ってターゲット(特徴点)までの距離を推定することができるので、低コストでロボットツールの先端同士を突き合わせることなくロボット間の相対位置関係を正確に計測できる。さらに、カメラパラメータを同定することなくロボット間の相対位置関係を計測できる。
106は撮像装置(CCDカメラ)である。107は撮像装置106が出力するビデオ信号を処理する画像処理装置であり、108は画像処理装置107が出力した画像データを作業者に提示(表示)する画像表示装置である。109は、第1および第2のロボットの制御装置102a,102bと画像処理装置107から得られるデータをもとにロボット間の相対位置関係(ベース座標系102aと102bの位置関係)を演算する相対位置演算装置である。また、110は撮像装置106の支持部である。
なお、撮像装置106の設置場所は、第1のロボット101aおよび第2のロボット101bの球状ターゲット105a,105bを共に撮影できる場所であれば何処でもよく、その位置を測定する必要はなく(未知でよい)、撮像装置106について予め何らかのキャリブレーションをする必要もない。
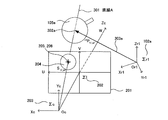
作業者は、画像表示装置108により撮像平面201の様子を目視しながら、イメージ204の重心205が基準点206に一致するように、操作インターフェイス104aを用いて第1のロボット101aの球状ターゲット105aを移動させる。あるいは、画像ベースの視覚サーボ技術(非特許文献2の第6章参照)を適用し、画像処理装置107において基準点206と重心205間の撮像平面201上での位置偏差を画像ヤコビアン行列によりロボット座標系での微小位置変化量に変換し、その変化量を第1のロボット101aの制御装置103aに与えて位置フィードバックを構成することにより、基準点206と重心205が一致するように第1のロボット101aの球状ターゲット105aを自動で移動させることもできる。
この状態で、作業者は、第1のロボットのベース座標系102aを基準にした特徴点302aへの位置ベクトル303a( r1 Pt1_a1 )を測定する。一般的な産業用ロボットでは、第1のロボット101aの各関節軸に組み込まれたエンコーダ(内界センサ)値から順キネマティクス演算によりTCP位置が制御装置103aで計算され、その結果を操作インターフェイス104a上で確認することができる。この一般的な機能を利用して位置ベクトル303aを測定すればよい。また、画像処理装置107と画像表示装置108を利用して、撮像平面201上のイメージ204の面積( S t1_a1 )を測定する。画像処理装置107内で抽出された円状領域の面積を自動計算しても良いし、画像平面201上に手動カーソルをオーバレイさせて画像表示装置108上でカーソルから面積を読み取っても良い。
つぎに、撮像平面201上で基準点206とは異なる第2の基準点および第3の基準点を定義し、基準点206の場合と同様に、カメラ座標系203の原点0cと前記第2および第3の基準点を結ぶ各直線上に球状ターゲット105aの特徴点を位置決めして、特徴点の位置ベクトルおよび球状ターゲット105aの画像の面積を求める。すなわち、前記第2の基準点について、位置ベクトル r1 Pt1_b1 および r1 Pt1_b2 、面積 St1_b1および S t1_b2 を、前記第3の基準点について、位置ベクトル r1 Pt1_c1 および r1 Pt1_c2 、面積 St1_c1 および S t1_c2 を求める。
そして、第2のロボット101bについても、同様の測定処理を行う(ロボットが3台以上ある場合についても同様)。
なお、各ロボットの各直線上に対する上述した位置ベクトルとターゲット面積の測定順序は、上記の説明にとらわれるものではなく、任意の順序で測定してもよい。
直線301(図3、図4参照)上に第1のロボット101aの球状ターゲット105aの中心(特徴点)を置いたときに、次式が成り立つ。
式(3)(7)より、( ua, va, f ) T を消去し、かつ式(6)(8)の拘束を利用して次式を得る。
カメラ座標系203の原点0cと前記第2および第3の基準点を結ぶ各直線上についても同様にして、式(9)(10)に該当する式を導出することによって、つぎの連立方程式が得られる。
( α r1 ΔPt1_a, β r1 ΔPt1_b , γ r1 ΔPt1_c ) (11)
α = Δwt2_a / Δw t1_a (12a)
β = Δw t2_b / Δw t1_b (12b)
γ = Δw t2_c / Δw t1_c (12c)
である。
式(1)(2)の両辺に左からr1 R cをかけると次式が成り立つ。
r1 POcOr1 = (w t1_a1 / w t1_a2)/(1 − wt1_a1 / w t1_a2) r1 Pt1_a2
− 1 / (1 − w t1_a1/ wt1_a2) r1 Pt1_a1 (16)
− 1 / (1 − wt2_a1 / w t2_a2) r2 Pt2_a1 (18)
結局、式(16)(18)で計算される位置ベクトルr1 POcOr1とr2 POcOr2 、および回転行列r1 Rr2から、第1のロボット101aのベース座標系102aの原点Or1と第2のロボット101bのベース座標系102bの原点Or2間の位置ベクトルは、次式により計算される。
また、奥行き方向に球状ターゲット105aを移動させたときのイメージ204の面積変化を測定してターゲットまでの距離比(スケールファクタの比)を求める(式(17)(19))代わりに、撮像装置106にズームレンズを取り付け、イメージ204の面積が一定となるようにズームレンズを移動させ、その移動量からターゲットまでの距離比を求めても良い。
また、撮像平面上でターゲットイメージの面積を測定する代わりに、ターゲットイメージの明るさ(光量)を測定することによって、式(17)(19)の距離比を推定しても良い。
図5に示すようにロボットのツール部分に大きさ(あるいは明るさ)の異なる複数のターゲット物体を取りつけると、撮像装置106からの距離が遠くなるほど大きい(明るい)ターゲットに切り替えることよって、距離比の推定精度を高めることができる。ただし、式(17)(19)によって距離比を計算する際に、ターゲットの大きさ(明るさ)の相違を考慮する必要がある。例えば、式(17)の St1_a2 を測定するときに、St1_a1 を測定するときに使用したターゲットのk倍の大きさのターゲットを使用したとすると、次式によって距離比を推定する。
前述した第1実施例では、カメラの撮像平面201においてイメージ204の重心205を撮像平面上の基準点206に一致させることによって、ターゲットの特徴点を直線上に拘束している。それに対して、第2実施例では、レーザ発振装置501から発振されるレーザ光線を利用して、ターゲットの特徴点を直線上に拘束する。すなわち、直進するレーザ光線そのものを、ターゲットの特徴点を拘束すべき直線とするものである。
第2実施例では、カメラ(撮像装置106)でロボットツール先端の球状ターゲットの近傍を撮影し、画像表示装置108に提示される撮像平面を目視しながらターゲットイメージの重心とレーザ光スポットが一致するように、作業者は操作インターフェイス104a,104bを利用してロボットのターゲットを移動させる(実施例1と同様にしてこの処理を自動化しても良い)。このようにすることによって、ターゲットの特徴点(球の中心)を直線(レーザ光線)上に拘束できる。
3本以上の直線に対して、各ロボットについて、同様にして位置ベクトルと距離を測定する。直線の向きを変更するには、支持部502のパン軸とチルト軸を回転させればよい。
3本の直線を直線A, B, Cと表し、直線A上に拘束されたロボット1のターゲット特徴点までの位置ベクトルを同様にr1 Pt1_a1およびr1 Pt1_a2と表す。ここで、直線Aの(単位)方向ベクトルをLa、レーザ距離センサで測定したr1 Pt1_a1の終点およびr1 Pt1_a2の終点までの距離をそれぞれd t1_a1, d t1_a2と表すと、式(1)〜(21)の所々で記述されている ( ua, va, f ) T をLaに、w t1_a1をd t1_a1に、wt1_a2をdt1_a2に置き換えて同様に相対位置を導出すればよい。ただし、第2実施例では、式(6)(8)(10)(17)(19)(21)は不要になる。なぜなら、wt1_a1やwt1_a2と異なり、d t1_a1やd t1_a2はレーザ距離センサで直接正確に測定可能な物理量であるからである。
この第3実施例では、ロボットツールとして球状ターゲットではなく、針状ツール705a,705bを取り付ける。そして、針状ツール705a,705bの先端を棒状ジグ701上に拘束する(突き合わせる)ことによって、ロボットツールの特徴点(先端)を直線上に拘束し、そのときのツール先端位置ベクトルをロボットの内界センサにより計測する。また、針状ツール705a,705bの先端を棒状ジグ701上に拘束した状態で距離目盛を読み取ることにより、棒状ジグ701の端点からの距離を測定する。
3本以上の直線(棒状ジグの配置を変える)に対して、各ロボットについて、同様にして位置ベクトルと距離を測定する。また、測定したデータからロボット間相対位置を導出原理は、第2実施例で説明した通りである。
以上説明したように、第3実施例では、細長い棒状ジグ701を利用してロボットツールの特徴点を直線上に拘束するので、ロボットツールの先端同士を突き合わせることなく、高価な装置を使用しなくてもロボット間の相対位置関係を手軽に計測できるのである。
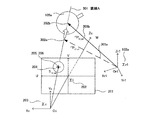
図9において、902はロボット101aのベース座標系102aの原点Or1,903はカメラ座標系203の原点Ocである。904a,904bはロボット101aに対して設定された平行な2つの平面であり、それぞれ平面G,平面Hと表す。206は、撮像平面201上に3つ以上設定した基準点であり、それらをI1 , I2 , …, IN と表す(Nは3以上の整数)。301は、カメラ座標原点Ocと基準点I1 , I2 , …, IN を通る直線であり、それぞれ直線1,直線2…直線Nと表す。905は、直線1,直線2…直線Nと平面Gとの交点であり、それぞれG1 , G2 , …, GN と表す。906は、直線1,直線2…直線Nと平面Hとの交点であり、それぞれH1 , H2 , …, HN と表す。907は撮像平面201に写ったマーカ901のイメージ(像)である。
撮像平面201において、マーカイメージ907の重心を基準点206に一致させるロボットの操作は、実施例1で説明したように画像ベースの視覚サーボ技術(非特許文献2の第6章参照)を適用して自動化することもできる。
また、位置ベクトルの測定順序は上記によらず任意に変更して構わない。さらには、ロボットの特徴点を直線301に拘束させた状態で、特徴点が各平面上に乗るようにロボットを動かしても良い。
以上が第1のロボット101aに対して行う測定処理である。
ロボット101aの測定処理で使用した同一の基準点I1 , I2 , …, IN を使って、ロボット101bに対しても同様の測定処理を行う。すなわち、ロボット101bのマーカ中心(特徴点)を平面S(平面T)に拘束した状態で、撮像平面201においてマーカイメージ907の重心が各基準点I1 , I2 , …, IN に一致するようにロボット101bを操作することによって、その特徴点を各交点S1 , S2 , …, SN (交点T1 , T2 , …, TN )に位置決めし、各交点までのベース座標系102bを基準にした位置ベクトルr2 Ps_1, r2 Ps_2 , …, r2 Ps_N (r2 Pt_1, r2 Pt_2 , …, r2 Pt_N )を測定する。
まず、ベース座標102aとベース座標102b間の回転行列r1 R r2 を求める。
ここで、直線kの方向ベクトルをn k と表す(k=1, 2, …, N)。ただし、カメラ座標原点Ocからマーカ901に向かう方向を正とする。図9を見れば分かるように、直線kと平面Gおよび平面Hの交点Gk , Hk までの位置ベクトルr1 Pg_k と r1 Ph_k の差をとって正規化することによって、ロボット101aのベース座標102aを基準にした方向ベクトルr1 n k を計算することができる。すなわち、
(k=1, 2, …, N)
式(22)の方向ベクトルと、カメラ座標系203を基準にした方向ベクトルC n k はつぎのように関係付けられる。
r2 R C・C n k = r2 n k, (k=1, 2, …, N) (25)
図9において、平面Gと平面Hは平行であるから、線分G1G2と線分H1H2も平行である。したがって、三角形OcG1G2 と三角形OcH1H2 は相似になり、
OcGk/ OcHk = const. (GiGj / HiHj= const.) (29)
( i=1,2,…,N, j=1,2,…,N, i≠j, k=1,2, …,N )

(k=1, 2, …, N)
= −r1 R r2・r2 Por2oC + r1 Por1oC (35)
δ(S,T) = sgn( Ls / Lt − 1 ) (37)
Claims (14)
- 複数のロボットの可動部の特徴点を少なくとも3本の直線上で動作させて、前記各直線上の少なくとも2点における前記特徴点のロボット座標値を測定するとともに、前記各直線上の特定点から前記特徴点までの距離または距離と相関関係を持つ物理量を測定し、各直線・各ロボットについて得られた測定値を基に複数ロボット間の相対位置関係を計算することを特徴とする複数ロボット間の相対位置計測方法。
- 前記特徴点を撮像装置で撮像して、その画像を画像表示装置に表示して、前記画像表示装置上の前記特徴点の画像が、前記画像表示装置上に定義された基準点と一致するように前記ロボットを操作して、前記特徴点を直線上で動作させることを特徴とする請求項1記載の複数ロボット間の相対位置計測方法。
- 前記ロボットの可動部にターゲット物体を設け、前記ターゲット物体に前記特徴点を定義し、前記画像表示装置上に表示された前記ターゲット物体のイメージの面積または明るさを前記距離と相関関係を持つ物理量とすることを特徴とする請求項2記載の複数ロボット間の相対位置計測方法。
- 前記ロボットの可動部にターゲット物体を設け、前記ターゲット物体に前記特徴点を定義するとともに、前記撮像装置にズームレンズを取り付け、前記画像表示装置に映し出された前記ターゲット物体のイメージの面積が一定となるように前記ズームレンズを移動させ、そのときの前記ズームレンズの移動量を前記距離と相関関係を持つ物理量とすることを特徴とする請求項2記載の複数ロボット間の相対位置計測方法。
- 前記ターゲット物体を発光させることを特徴とする請求項3または請求項4記載の複数ロボット間の相対位置計測方法。
- 大きさまたは明るさの異なる複数のターゲット物体をロボットの可動部に設け、前記撮像装置からの距離に応じて前記ターゲット物体を切り替えることを特徴とする請求項3乃至5記載の複数ロボット間の相対位置計測方法。
- レーザ発振装置から発振するレーザ光に沿って、前記ロボットの可動部の特徴点を直線動作させることを特徴とする請求項1記載の複数ロボット間の相対位置計測方法。
- ロボットの可動部にターゲット物体を設け、前記ターゲット物体に前記特徴点を定義し、前記レーザ光を前記ターゲット物体に照射して、前記レーザ光の光点が前記特徴点に一致するように前記ロボットを操作して、前記特徴点を直線動作させることを特徴とする請求項7記載の複数ロボット間の相対位置計測方法。
- 撮像装置の光軸とレーザ発振装置のレーザ光軸が平行となるように、前記撮像装置と前記レーザ発信装置を一体にした装置を使用することを特徴とする請求項8記載の複数ロボット間の相対位置計測装置。
- 細長い棒状ジグに沿って、前記ロボットの可動部の特徴点を直線動作させることを特徴とする請求項1記載の複数ロボット間の相対位置計測方法。
- 前記棒状ジグに距離目盛を付し、その距離目盛を使って、前記特徴点までの距離を測定することを特徴とする請求項10記載の複数ロボット間の相対位置計測方法。
- 前記ロボットそれぞれ対して2つ以上の平行な平面を定義し、前記特徴点を前記各平面上に拘束させて前記各直線と前記各平面との交点に前記特徴点を位置決めし、前記各交点における前記特徴点のロボット座標値を測定することを特徴とする請求項1または請求項2記載の複数ロボット間の相対位置計測方法。
- 前記各交点における前記特徴点のロボット座標値をもとに、前記距離と相関関係を持つ物理量を測定することを特徴とする請求項12記載の複数ロボット間の相対位置計測方法。
- 前記2つ以上の平行な平面のうち、ある平面上の前記交点間の距離と他の平面上の前記交点間の距離の比を、前記距離と相関関係を持つ物理量とすることを特徴とする請求項13記載の複数ロボット間の相対位置計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004027745A JP4289169B2 (ja) | 2003-09-29 | 2004-02-04 | 複数ロボット間の相対位置計測方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003338059 | 2003-09-29 | ||
| JP2004027745A JP4289169B2 (ja) | 2003-09-29 | 2004-02-04 | 複数ロボット間の相対位置計測方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005125478A true JP2005125478A (ja) | 2005-05-19 |
| JP2005125478A5 JP2005125478A5 (ja) | 2007-03-15 |
| JP4289169B2 JP4289169B2 (ja) | 2009-07-01 |
Family
ID=34655512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004027745A Expired - Fee Related JP4289169B2 (ja) | 2003-09-29 | 2004-02-04 | 複数ロボット間の相対位置計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4289169B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008254097A (ja) * | 2007-04-03 | 2008-10-23 | Denso Wave Inc | 複数ロボット間の相対位置計算方法 |
| JP2010064200A (ja) * | 2008-09-11 | 2010-03-25 | Cognex Corp | 制御システム、制御方法およびプログラム |
| JP2010076054A (ja) * | 2008-09-26 | 2010-04-08 | Ihi Corp | ロボット装置及びロボット装置の制御方法 |
| JP2014176944A (ja) * | 2013-03-15 | 2014-09-25 | Yaskawa Electric Corp | ロボットシステム、校正方法及び被加工物の製造方法 |
| JP2017077609A (ja) * | 2015-10-21 | 2017-04-27 | ファナック株式会社 | ロボットの手首部の機構パラメータを校正する校正装置および校正方法 |
| JP2017100202A (ja) * | 2015-11-30 | 2017-06-08 | 株式会社アイキューブテクノロジ | ロボットシステム、制御装置、制御方法、及びプログラム |
| US10040198B2 (en) | 2014-12-26 | 2018-08-07 | Samsung Eletcronics Co., Ltd. | Method of processing location information and method of processing measurement information including the same |
| CN108759672A (zh) * | 2018-06-16 | 2018-11-06 | 复旦大学 | 工业机器人末端位置测量及位移误差补偿方法 |
| CN109571471A (zh) * | 2018-12-03 | 2019-04-05 | 宇环数控机床股份有限公司 | 一种用于双机器人相对空间位置标定的方法 |
-
2004
- 2004-02-04 JP JP2004027745A patent/JP4289169B2/ja not_active Expired - Fee Related
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008254097A (ja) * | 2007-04-03 | 2008-10-23 | Denso Wave Inc | 複数ロボット間の相対位置計算方法 |
| JP2010064200A (ja) * | 2008-09-11 | 2010-03-25 | Cognex Corp | 制御システム、制御方法およびプログラム |
| JP2010076054A (ja) * | 2008-09-26 | 2010-04-08 | Ihi Corp | ロボット装置及びロボット装置の制御方法 |
| JP2014176944A (ja) * | 2013-03-15 | 2014-09-25 | Yaskawa Electric Corp | ロボットシステム、校正方法及び被加工物の製造方法 |
| US10040198B2 (en) | 2014-12-26 | 2018-08-07 | Samsung Eletcronics Co., Ltd. | Method of processing location information and method of processing measurement information including the same |
| JP2017077609A (ja) * | 2015-10-21 | 2017-04-27 | ファナック株式会社 | ロボットの手首部の機構パラメータを校正する校正装置および校正方法 |
| US10189161B2 (en) | 2015-10-21 | 2019-01-29 | Fanuc Corporation | Calibration system and calibration method calibrating mechanical parameters of wrist part of robot |
| JP2017100202A (ja) * | 2015-11-30 | 2017-06-08 | 株式会社アイキューブテクノロジ | ロボットシステム、制御装置、制御方法、及びプログラム |
| CN108759672A (zh) * | 2018-06-16 | 2018-11-06 | 复旦大学 | 工业机器人末端位置测量及位移误差补偿方法 |
| CN108759672B (zh) * | 2018-06-16 | 2020-04-24 | 复旦大学 | 工业机器人末端位置测量及位移误差补偿方法 |
| CN109571471A (zh) * | 2018-12-03 | 2019-04-05 | 宇环数控机床股份有限公司 | 一种用于双机器人相对空间位置标定的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4289169B2 (ja) | 2009-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6044308A (en) | Method and device for robot tool frame calibration | |
| KR102227194B1 (ko) | 터치 프로브에 대하여 시각 시스템을 켈리브레이팅하기 위한 시스템 및 방법 | |
| US6763284B2 (en) | Robot teaching apparatus | |
| CN101909828B (zh) | 将至少一个物体高精度定位在空间最终位置的方法和系统 | |
| EP3195989B1 (en) | Apparatus and method to optically locate workpiece for robotic operations | |
| JP5922572B2 (ja) | 実用型3dビジョンシステム装置およびその方法 | |
| US10618166B2 (en) | Teaching position correction device and teaching position correction method | |
| US20140160115A1 (en) | System And Method For Visually Displaying Information On Real Objects | |
| JP4799088B2 (ja) | 遠隔検査における作業位置計測方法およびその装置 | |
| JPH10253322A (ja) | 空間内で物体を位置指定する方法および装置 | |
| CN104227722A (zh) | 机器人系统与机器人控制方法 | |
| US20170314910A1 (en) | Optical Three-Dimensional Coordinate Measuring Device and Measurement Method Thereof | |
| JP6869159B2 (ja) | ロボットシステム | |
| JP4289169B2 (ja) | 複数ロボット間の相対位置計測方法 | |
| JP2021527220A (ja) | 空間内の複雑な表面上の点を特定するための方法および設備 | |
| JP6900290B2 (ja) | ロボットシステム | |
| US10607337B2 (en) | Object inspection system and object inspection method | |
| Ng et al. | Intuitive robot tool path teaching using laser and camera in augmented reality environment | |
| CN111707189A (zh) | 基于双目视觉的激光位移传感器光束方向标定方法 | |
| Alzarok et al. | Survey of the current practices and challenges for vision systems in industrial robotic grasping and assembly applications | |
| Tran et al. | An Intelligent Path Planning of Welding Robot Based on Multi-Sensor Interaction | |
| EP3744461B1 (en) | Weld operation measurement system | |
| Kang et al. | Laser vision system for automatic seam tracking of stainless steel pipe welding machine (ICCAS 2007) | |
| JP2009279677A (ja) | 計測装置を用いてロボットの位置教示を行うロボット制御装置 | |
| CN115972192A (zh) | 具有可变空间分辨率的3d计算机视觉系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070126 |
|
| A621 | Written request for application examination |
Effective date: 20070126 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080819 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090128 |
|
| A521 | Written amendment |
Effective date: 20090130 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090310 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Effective date: 20090323 Free format text: JAPANESE INTERMEDIATE CODE: A61 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120410 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |