JP2005124207A - ビデオ信号の雑音低減のための装置及び方法 - Google Patents
ビデオ信号の雑音低減のための装置及び方法 Download PDFInfo
- Publication number
- JP2005124207A JP2005124207A JP2004300449A JP2004300449A JP2005124207A JP 2005124207 A JP2005124207 A JP 2005124207A JP 2004300449 A JP2004300449 A JP 2004300449A JP 2004300449 A JP2004300449 A JP 2004300449A JP 2005124207 A JP2005124207 A JP 2005124207A
- Authority
- JP
- Japan
- Prior art keywords
- recursive filter
- video signal
- output
- input side
- difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 12
- 238000001914 filtration Methods 0.000 claims description 23
- 238000004590 computer program Methods 0.000 claims description 2
- 238000006073 displacement reaction Methods 0.000 description 7
- 230000007547 defect Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000002547 anomalous effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/21—Circuitry for suppressing or minimising disturbance, e.g. moiré or halo
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Picture Signal Circuits (AREA)
Abstract
【解決手段】動き補償補間手段と、第1入力側において、前記補間手段により動き補償された再帰フィルタの出力を受け取り、第2入力側において、ビデオ信号を受け取るように意図された再帰フィルタと、ビデオ信号と前記補間手段により動き補償された再帰フィルタの出力との間の差を計算するための手段とを備えたビデオ信号の雑音低減のための装置において、前記の差が所定の雑音レベル閾値より大である場合には、前記再帰フィルタの第1入力側にビデオ信号を供給し、前記の差が前記所定の雑音レベル閾値より小である場合には、前記再帰フィルタの第1入力側に前記再帰フィルタの動き補償された出力を供給する手段を有するように装置を構成する。
【選択図】図1
Description
ビデオ信号の雑音レベルを評価するための手段と、
所定の雑音レベル閾値を計算するための手段と
を有している。
前記の差が所定の雑音レベル閾値より大である場合には、前記再帰フィルタの第1入力側にビデオ信号を供給し、前記の差が前記所定の雑音レベル閾値より小である場合には、前記再帰フィルタの第1入力側に前記再帰フィルタの動き補償された出力を供給するステップを有する。
乗算器6の出力側は加算器10の一方の入力側に接続されている。加算器10の他方の入力側はマルチプレクサ8の出力側に接続されている。加算器10の出力側ではf(x,y,t)が得られる:
f(x,y,t)=α×e(x,y,t)+(1−α)×m(x,y,t)
信号f(x,y,t)は、1フレームの遅延f(x,y,t−1)を経た後、動き補償補間手段2に送られる。補間手段2は、f(x,y,t−1)及び現在フレームと先行フレームとの間の推定された変位ベクトル(dx,dy)から、動き補償された出力r(x,y,t)を生成する。
コンパレータ11は入力としてg(x,y,t)と雑音レベル閾値Scを受け取る。
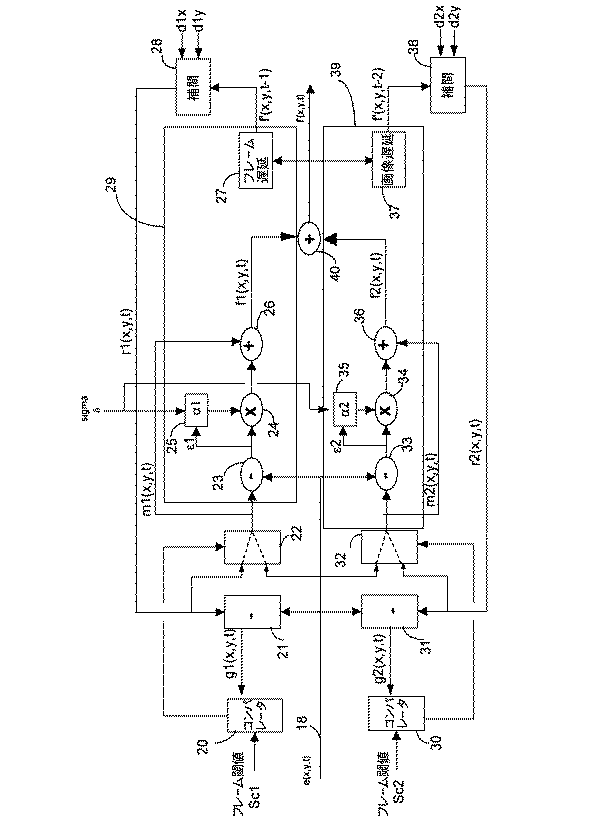
乗算器24の出力側は加算器26の入力側に接続されている。加算器26の他方の入力側は乗算器22の出力側に接続されている。加算器26の出力側ではf1(x,y,t)が得られる。
乗算器34の出力側は加算器36の入力側に接続されている。加算器36の他方の入力側はマルチプレクサ32の出力側に接続されている。加算器36の出力側ではf2(x,y,t)が得られる。
つぎに、f1(x,y,t)及びf2(x,y,t)は加算器39に送られ、加算器39の出力側で、フィルタリングされた信号f’(x,y,t)が供給される。
つぎに、信号f’(x,y,t)はフレーム遅延モジュール27と画像遅延モジュール37とに送られる。
コンパレータ20は入力としてg1(x,y,t)と雑音レベル閾値Sc1を受け取る。
2 動き補償補間手段
3 再帰フィルタ
5 遅延手段
6 乗算器
7 減算器
8 マルチプレクサ
9 ビデオ信号と再帰フィルタの動き補償された出力との間の差を計算する手段
10 加算器
11 コンパレータ
12 ビデオ信号
13 雑音レベル
14 入力ビデオ信号とマルチプレクサ8の出力との間の計算された誤差
20 コンパレータ
21 差分器
22 マルチプレクサ
23 減算器
24 乗算器
26 加算器
27 フレーム遅延モジュール
28 補間モジュール
30 コンパレータ
31 差分器
32 マルチプレクサ
33 減算器
34 乗算器
36 加算器
37 画像遅延モジュール
38 補間モジュール
Claims (9)
- 動き補償補間手段(2)と、
第1入力側において、前記補間手段により動き補償された再帰フィルタ(3)の出力(r(x,y,t))を受け取り、第2入力側において、ビデオ信号(12)を受け取るように意図された再帰フィルタ(3)と、
ビデオ信号(12)と前記補間手段により動き補償された再帰フィルタ(3)の出力(r(x,y,t))との間の差を計算するための手段(9)と
を備えたビデオ信号の雑音低減のための装置において、
前記装置は、
前記の差が所定の雑音レベル閾値(Sc)より大である場合には、前記再帰フィルタの第1入力側にビデオ信号(12)を供給し、前記の差が前記所定の雑音レベル閾値(Sc)より小である場合には、前記再帰フィルタの第1入力側に前記再帰フィルタ(3)の動き補償された出力(r(x,y,t))を供給する手段(8)を有する、ことを特徴とするビデオ信号の雑音低減のための装置。 - ビデオ信号の雑音レベルを評価するための手段と、
前記所定の雑音レベル閾値を計算するための手段と
を有する、請求項1記載の装置。 - ビデオ信号(12)と前記補間手段により動き補償された再帰フィルタ(3)の出力(r(x,y,t))との間の差を計算するための前記手段(9)は、ビデオ信号(12)により搬送された画像の各ピクセルに関して前記の差を計算する、請求項2記載の装置。
- 前記再帰フィルタ(3)は1つ又は2つのフィルタリングセルを有している、請求項1から3のいずれか1項記載の装置。
- 前記閾値(Sc)は前記再帰フィルタのフィルタリングパラメータに関連している、請求項1から4のいずれか1項記載の装置。
- 前記閾値は各フレームの雑音レベルに依存する、請求項1から5のいずれか1項記載の装置。
- 前記閾値は、該閾値を各画像の特性領域に適合させることにより動的及び局所的に変更されうる、請求項1から5のいずれか1項記載の装置。
- 動き補償補間を行うステップと、
第1入力側において、再帰フィルタ(3)の動き補償された出力(r(x,y,t))を受け取り、第2入力側において、ビデオ信号(12)を受け取るように意図された再帰フィルタリングを行うステップと、
ビデオ信号(12)と前記補間手段により動き補償された再帰フィルタ(3)の出力(r(x,y,t))との間の差を計算するステップと
を有するビデオ信号の雑音低減のための方法において、
前記の差が所定の雑音レベル閾値(Sc)より大である場合には、前記再帰フィルタの第1入力側にビデオ信号(12)を供給し、前記の差が前記所定の雑音レベル閾値(Sc)より小である場合には、前記再帰フィルタの第1入力側に前記再帰フィルタ(3)の動き補償された出力(r(x,y,t))を供給するステップを有する、ことを特徴とするビデオ信号の雑音低減のための方法。 - コンピュータ上で実行した際に、請求項8に記載の方法を実行することのできるプログラムコード命令を含んでいることを特徴とするコンピュータプログラム製品。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0312006A FR2860940A1 (fr) | 2003-10-14 | 2003-10-14 | Dispositif et procede de reduction de bruit d'un signal video |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005124207A true JP2005124207A (ja) | 2005-05-12 |
| JP4490231B2 JP4490231B2 (ja) | 2010-06-23 |
Family
ID=34355470
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004300449A Expired - Fee Related JP4490231B2 (ja) | 2003-10-14 | 2004-10-14 | ビデオ信号の雑音低減のための装置及び方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7268835B2 (ja) |
| EP (1) | EP1524845A1 (ja) |
| JP (1) | JP4490231B2 (ja) |
| KR (1) | KR101074900B1 (ja) |
| CN (1) | CN1607833B (ja) |
| FR (1) | FR2860940A1 (ja) |
| MY (1) | MY135632A (ja) |
| TW (1) | TWI342707B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010505336A (ja) * | 2006-09-29 | 2010-02-18 | トムソン ライセンシング | 適応ピクセルベースのフィルタリングのための自動パラメータ推定 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2860941A1 (fr) * | 2003-10-14 | 2005-04-15 | Nextream France | Dispositif et procede d'estimation de bruit d'un signal video |
| FR2860940A1 (fr) | 2003-10-14 | 2005-04-15 | Nextream France | Dispositif et procede de reduction de bruit d'un signal video |
| US8588513B2 (en) * | 2005-07-18 | 2013-11-19 | Broadcom Corporation | Method and system for motion compensation |
| US7697783B2 (en) * | 2005-07-26 | 2010-04-13 | Sony Corporation | Coding device, coding method, decoding device, decoding method, and programs of same |
| TWI401944B (zh) * | 2007-06-13 | 2013-07-11 | Novatek Microelectronics Corp | 用於視訊處理系統之雜訊消除裝置 |
| DE102011052269B4 (de) | 2010-09-16 | 2017-03-30 | Helmholtz-Zentrum Dresden - Rossendorf E.V. | Anordnung zur Erzeugung hochenergetischer Protonenstrahlen und deren Verwendung |
| WO2013147756A1 (en) * | 2012-03-28 | 2013-10-03 | Intel Corporation | Content aware selective adjusting of motion estimation |
| US9924200B2 (en) * | 2013-01-24 | 2018-03-20 | Microsoft Technology Licensing, Llc | Adaptive noise reduction engine for streaming video |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS592227B2 (ja) * | 1978-08-21 | 1984-01-17 | 株式会社日立製作所 | 雑音除去方式 |
| US5343247A (en) * | 1991-08-02 | 1994-08-30 | U.S. Philips Corporation | Filter circuit for preprocessing a video signal to be coded |
| US5446501A (en) * | 1992-10-22 | 1995-08-29 | Accom, Incorporated | Three-dimensional median and recursive filtering apparatus and method for video image enhancement |
| US5442407A (en) * | 1994-03-22 | 1995-08-15 | Matsushita Electric Corporation Of America | Video signal noise reduction system using time-varying filter coefficients |
| US5574512A (en) * | 1994-08-15 | 1996-11-12 | Thomson Consumer Electronics, Inc. | Motion adaptive video noise reduction system |
| JPH10511530A (ja) * | 1995-10-20 | 1998-11-04 | フィリップス エレクトロニクス ネムローゼ フェンノートシャップ | テレビジョン受信機におけるデータのフィルタリング |
| CN1102823C (zh) * | 1996-02-05 | 2003-03-05 | 皇家菲利浦电子有限公司 | 图象数据噪声滤波 |
| US6037986A (en) * | 1996-07-16 | 2000-03-14 | Divicom Inc. | Video preprocessing method and apparatus with selective filtering based on motion detection |
| US6281942B1 (en) * | 1997-08-11 | 2001-08-28 | Microsoft Corporation | Spatial and temporal filtering mechanism for digital motion video signals |
| EP1230791A1 (en) * | 1999-11-11 | 2002-08-14 | STMicroelectronics Asia Pacific Pte Ltd. | Spatio-temporal video noise reduction system |
| DE19961121C2 (de) * | 1999-12-17 | 2002-02-07 | Infineon Technologies Ag | Schaltungsanordnung und Verfahren zur Offsetkompensation eines Signals |
| US6847408B1 (en) * | 2000-07-27 | 2005-01-25 | Richard W. Webb | Method and apparatus for reducing noise in an image sequence |
| CN1419680A (zh) * | 2001-01-26 | 2003-05-21 | 皇家菲利浦电子有限公司 | 时空滤波器单元以及包括这种时空滤波器单元的图像显示设备 |
| US7050501B2 (en) * | 2002-07-16 | 2006-05-23 | Broadcom Corporation | Digital noise reduction techniques |
| FR2860940A1 (fr) | 2003-10-14 | 2005-04-15 | Nextream France | Dispositif et procede de reduction de bruit d'un signal video |
-
2003
- 2003-10-14 FR FR0312006A patent/FR2860940A1/fr active Pending
-
2004
- 2004-09-06 EP EP04021100A patent/EP1524845A1/en not_active Withdrawn
- 2004-10-05 US US10/958,904 patent/US7268835B2/en active Active
- 2004-10-08 TW TW093130451A patent/TWI342707B/zh not_active IP Right Cessation
- 2004-10-11 CN CN2004100903372A patent/CN1607833B/zh not_active Expired - Fee Related
- 2004-10-11 MY MYPI20044165A patent/MY135632A/en unknown
- 2004-10-13 KR KR1020040081660A patent/KR101074900B1/ko not_active IP Right Cessation
- 2004-10-14 JP JP2004300449A patent/JP4490231B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010505336A (ja) * | 2006-09-29 | 2010-02-18 | トムソン ライセンシング | 適応ピクセルベースのフィルタリングのための自動パラメータ推定 |
| US8467626B2 (en) | 2006-09-29 | 2013-06-18 | Thomson Licensing | Automatic parameter estimation for adaptive pixel-based filtering |
| KR101478669B1 (ko) * | 2006-09-29 | 2015-01-02 | 톰슨 라이센싱 | 적응성 픽셀-기반의 필터링을 위한 자동 파라미터 추정 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1607833A (zh) | 2005-04-20 |
| MY135632A (en) | 2008-05-30 |
| TWI342707B (en) | 2011-05-21 |
| JP4490231B2 (ja) | 2010-06-23 |
| TW200514432A (en) | 2005-04-16 |
| CN1607833B (zh) | 2010-07-21 |
| KR101074900B1 (ko) | 2011-10-18 |
| US7268835B2 (en) | 2007-09-11 |
| US20050094035A1 (en) | 2005-05-05 |
| KR20050036752A (ko) | 2005-04-20 |
| FR2860940A1 (fr) | 2005-04-15 |
| EP1524845A1 (en) | 2005-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102192778B1 (ko) | 선택 가능한 보간 필터를 구비한 비디오 모션 보상 장치 및 방법 | |
| KR100425640B1 (ko) | 비디오신호처리를위한노이즈추정및감소장치 | |
| KR100237805B1 (ko) | 비디오 인코딩을 위한 공간 적응 필터링 방법 및 장치 | |
| US8160161B2 (en) | Method and apparatus for performing motion compensated temporal filtering in video encoding | |
| JP2970417B2 (ja) | 動画像符号化方式 | |
| CA2456252A1 (en) | Motion-adaptive noise reduction pre-processing for digital video signal | |
| JP2003163894A (ja) | 適応動き補償型フレーム及び/又はフィールドレート変換装置及びその方法 | |
| JPH08251591A (ja) | ブロック化現象除去のための後処理装置及びその方法 | |
| JP2007507169A (ja) | ビデオ・コンフォートノイズ付加技術 | |
| US20120183055A1 (en) | Temporal Prediction Structure Aware Temporal Filter | |
| CN107454402B (zh) | 用于减小含噪图像或图像序列的编码的噪声的方法 | |
| JP4490231B2 (ja) | ビデオ信号の雑音低減のための装置及び方法 | |
| JP2004503960A (ja) | 画像シーケンスのノイズフィルタリング | |
| US20100272182A1 (en) | Image flow knowledge assisted latency-free in-loop temporal filter | |
| KR20050036753A (ko) | 비디오 신호의 노이즈를 추정하는 장치 및 방법 | |
| JPH0767176B2 (ja) | 符号化雑音除去フィルタ | |
| JPH11177993A (ja) | 動画像符号化装置 | |
| JP4231565B2 (ja) | 画像情報エンコーディングシステム | |
| JPH11205797A (ja) | 動画像符号化装置 | |
| WO2002007445A1 (en) | Pre-processing method for motion estimation. | |
| US20080063064A1 (en) | Method and System for Motion Compensated Temporal Filtering Using IIR Filtering | |
| JP4380498B2 (ja) | ブロック歪み低減装置 | |
| JP2917988B1 (ja) | 動画像符号化装置のプレフィルタ | |
| US20050162565A1 (en) | Slow motion processing of digital video data | |
| KR100299485B1 (ko) | 동영상부호화를위한노이즈제거방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100310 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100401 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130409 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130409 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140409 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |