JP2005116626A - 位置検出装置及び位置検出方法、並びに露光装置 - Google Patents
位置検出装置及び位置検出方法、並びに露光装置 Download PDFInfo
- Publication number
- JP2005116626A JP2005116626A JP2003345890A JP2003345890A JP2005116626A JP 2005116626 A JP2005116626 A JP 2005116626A JP 2003345890 A JP2003345890 A JP 2003345890A JP 2003345890 A JP2003345890 A JP 2003345890A JP 2005116626 A JP2005116626 A JP 2005116626A
- Authority
- JP
- Japan
- Prior art keywords
- image
- mark
- energy distribution
- correlation
- distribution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/42—Global feature extraction by analysis of the whole pattern, e.g. using frequency domain transformations or autocorrelation
- G06V10/431—Frequency domain transformation; Autocorrelation
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Image Processing (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【課題】上記従来のパターン認識技術の原理的な弱みを解決し、マークの誤検出を低減する。
【解決手段】ステップ1:マークは同一の小図形で構成されるものとする。ステップ2:フーリエ変換などの直交変換を用いて、マーク画像中の周期的パターンの繰り返し位置とその位置での周期性の強さ(確率分布)を求め、強さの最大値と最小値を用いて正規化する。ステップ3:観測画像中の部分画像毎にステップ2を実行する。ステップ4:ステップ2で求めたマークの確率分布における特徴のある位置を求める。ステップ5:ステップ4で求めた位置におけるマークの確率分布の成分及びステップ4で求めた位置における部分画像の確率分布の成分同士の相関度を求める。この操作を全ての部分画像に行う。ステップ6:ステップ5で求めた相関度が最大の部分画像の位置をマーク位置とする。
【選択図】 図1
【解決手段】ステップ1:マークは同一の小図形で構成されるものとする。ステップ2:フーリエ変換などの直交変換を用いて、マーク画像中の周期的パターンの繰り返し位置とその位置での周期性の強さ(確率分布)を求め、強さの最大値と最小値を用いて正規化する。ステップ3:観測画像中の部分画像毎にステップ2を実行する。ステップ4:ステップ2で求めたマークの確率分布における特徴のある位置を求める。ステップ5:ステップ4で求めた位置におけるマークの確率分布の成分及びステップ4で求めた位置における部分画像の確率分布の成分同士の相関度を求める。この操作を全ての部分画像に行う。ステップ6:ステップ5で求めた相関度が最大の部分画像の位置をマーク位置とする。
【選択図】 図1
Description
本発明は、パターン位置を検出する技術に関する。また、本発明は、特にデジタル画像を用いたパターン位置の検出技術に関し、例えば、生産ラインにおける半導体製造装置などにおいて、パターン位置を画像処理技術やパターン認識技術を用いて検出する技術に関する。
半導体製造装置においては、ウェハ上にレチクルパターンを投影露光する前に、ウェハとレチクルの位置合わせが行われる。この位置合わせを行うには、通常、CCDカメラなどの画像入力装置を用いてウェハ上のマークを中心としたデジタル画像(以下、観測画像とする)を半導体製造装置に取り込み、パターン認識技術を用いて観測画像中でのマークの位置を検出する。検出の手順は、まず観測画像全体から大まかな位置を絞り、次に絞り込んだ領域から精密な位置を検出するという2つに分けられる。
本願発明では、特に上記検出の手順のうち、観測画像全体から大まかな位置(以下、マーク位置検出とする)を絞ることを対象としている。
通常、このマーク位置検出にはパターン認識技術が用いられる。そして、このパターン認識技術を用いて観測画像の各位置においる評価値を算出し、最大の評価値をもつ位置をマーク位置としている。
従来から用いられているパターン認識技術には、(i)マークのエッジ情報をテンプレートとして注目位置の近傍画像(以下、部分画像とする)の相関度を算出するベクトル相関法(例えば、特許文献1参照)、(ii)設計したマークの画像と観測画像の輝度値を用いた相互相関法、(iii)設計したマークの画像をフーリエ変換しその位相成分のみを逆フーリエ変換して得られた画像(以下、フーリエ位相画像)と観測画像のフーリエ位相画像を用いた相互相関法(以下、フーリエ位相相関法とする)などがある。
(i)〜(iii)のようなパターン認識技術を用いてマーク位置検出を行う場合、観測画像の様々な画質劣化によって検出率は大きく低下する。半導体製造装置では同じパターンをウェハ上に露光するため観測画像として同じ画像が取り込まれるはずである。しかし、プロセスの変動、照明条件などにより1)観測画像毎に各部分画像の平均輝度が異なる場合、2)マーク信号の振幅とノイズ信号の振幅の差が少なくなる場合がある。
そこで、従来技術の原理的な強み・弱みを踏まえた上で、上記1)、2)の画質劣化にロバスト性があるか否かを以下に述べる。
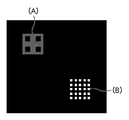
まず、ベクトル相関法の原理的な強みは、部分画像中の決められた位置でのエッジの強弱を正規化して相関度を算出しているため、部分画像の平均輝度に左右されにくいテンプレートの形状認識を行えることである。例えば、図10に示すように、平均輝度aの画像(A)と画像(A)のコントラストを変化させた平均輝度bの画像(B)に対して、テンプレート画像(T)を用いて相関度を算出すると画像(A)も画像(B)も同じ値になる。図11(A)、(B)に部分画像の例を示す。図12は、図11の部分画像(A)と図11の部分画像(B)のコントラストを低くして平均輝度を下げた部分画像を含む観測画像の例である。また、図13は、図11の部分画像(A)のコントラストを低くして平均輝度を下げた部分画像と図11の部分画像(B)を含む観測画像の例である。この図12、13に図14のテンプレート画像を用いて相関度を算出すると、図12の部分画像(A)と図13の部分画像(A)の値、及び、図12の部分画像(B)と図13の部分画像(B)の値は同じ値になる。このことから、ベクトル相関法では、上記1)観測画像毎に各部分画像の平均輝度が異なる場合であっても同じ形状であれば安定して同じ相関度を算出できる。
次に、ベクトル相関法の原理的な弱みは、マークのエッジ位置を予め複数点だけ決めておき部分画像の相関度を算出するために、決めた点の位置以外にもエッジが存在するような部分画像をマークと誤る場合があることである。例えば、図15ではテンプレート画像(T)の1,2,3,4の位置でのエッジ情報を用いて部分画像(S)の相関度を算出しており、部分画像(S)とマーク画像の相関度が同じになる。また、上記2)マーク信号の振幅とノイズ信号の振幅の差が少なくなる場合には、マークのエッジ情報とノイズ部のエッジ情報の差が無くなり誤検出する場合があることである。例えば、図15のテンプレート画像(T)の1,2,3,4の位置でのエッジ情報を用いた場合、図16ではマーク画像(M)とノイズ画像(N)の相関度の差はほとんどない。
相互相関法やフーリエ位相相関法の原理的な強みは、部分画像全体の輝度情報を用いて相関度を算出しているため、テンプレート画像のみが存在する部分画像の相関度はテンプレート画像とテンプレート画像には無い部分が同時に存在する部分画像の相関度よりも高くなり区別できることである。例えば、図15ではテンプレート画像(T)を用いた場合、部分画像(S)の相関度よりもマーク画像の相関度の方が高くなる。
しかしながら、相互相関法やフーリエ位相相関法の原理的な弱みは、部分画像の輝度の強弱を用いて相関度を算出しているため、部分画像毎の平均輝度に相関度が左右されることである。例えば、テンプレート画像に図14を用いた場合、図12の観測画像では輝度平均の高い部分画像(A)の相関度が輝度平均の低い部分画像(B)の相関度よりも高く、図13の観測画像では輝度平均の高い部分画像(B)の相関度が輝度平均の低い部分画像(A)の相関度よりも高くなる場合がある。このことから、上記1)観測画像毎に各部分画像の平均輝度が異なる場合には誤検出する場合がある。また、上記2)マーク信号の振幅とノイズ信号の振幅の差が少なくなる場合には、マーク画像とノイズ画像の差が小さくなり、しかも、マーク画像の平均輝度とノイズ画像の平均輝度が近くなるために、誤検出する場合がある。例えば、図15のテンプレート画像(T)を用いた場合、図16ではマーク画像(M)とノイズ画像(N)の相関度の差はほとんどない。
特開2001−195583号公報
上記のような原理的な弱みにより、以下の課題がある。
(i)のベクトル相関法では、
(A)予め複数点だけ決めた点位置以外にもエッジが存在するような部分画像をマークと誤検出する場合がある。
(ii)の相互相関法や(iii)のフーリエ位相相関法では、
(B)マーク画像の平均輝度がその他の部分の平均輝度よりも低いときに誤検出する場合がある。
(C)また、ベクトル相関法、相互相関法、フーリエ位相相関法の共通の課題として、観測画像のノイズ量が多い場合、マークと他の部分の評価値差が小さくなり誤検出する場合がある。
(i)のベクトル相関法では、
(A)予め複数点だけ決めた点位置以外にもエッジが存在するような部分画像をマークと誤検出する場合がある。
(ii)の相互相関法や(iii)のフーリエ位相相関法では、
(B)マーク画像の平均輝度がその他の部分の平均輝度よりも低いときに誤検出する場合がある。
(C)また、ベクトル相関法、相互相関法、フーリエ位相相関法の共通の課題として、観測画像のノイズ量が多い場合、マークと他の部分の評価値差が小さくなり誤検出する場合がある。
本発明は、上記従来のパターン認識技術の原理的な弱みを解決し、マークの誤検出を低減することを目的とする。
上述した課題を解決するため、本発明は従来技術の強みを活かしつつ弱みを補うことを行った。即ち、
相互相関法やフーリエ位相相関法は部分画像全体の位置での輝度情報を用いていることが強みであり、ベクトル相関法は用いる情報の位置を限定していることが弱みとなっている。そこで、まず、部分画像全体の位置での輝度情報を用いることとした。
相互相関法やフーリエ位相相関法は部分画像全体の位置での輝度情報を用いていることが強みであり、ベクトル相関法は用いる情報の位置を限定していることが弱みとなっている。そこで、まず、部分画像全体の位置での輝度情報を用いることとした。
次に、ベクトル相関法は、部分画像の平均輝度に左右されない形状認識ができることが強みであり、相互相関法やフーリエ位相相関法は、部分画像毎の平均輝度に相関度が左右されることが弱みとなっている。そこで、部分画像全体の位置での輝度情報を用いて、平均輝度に左右されずに、部分画像に含まれる周期的パターンが現れる位置とその強さを定量的に評価できる特徴空間を生成することとした。
具体的には、次の3点を実現した。
(i)部分画像全体の位置での輝度情報を用いる。
(ii)、(i)の輝度情報を用いて、部分画像に含まれる周期的パターンが現れる位置とその強さを定量的に評価できる特徴空間を生成する。
(i)部分画像全体の位置での輝度情報を用いる。
(ii)、(i)の輝度情報を用いて、部分画像に含まれる周期的パターンが現れる位置とその強さを定量的に評価できる特徴空間を生成する。
これにより、繰り返し出現する図形が部分画像に存在する場合、その図形がある位置でどれくらいの確率で出現するかを部分画像毎に把握できる。
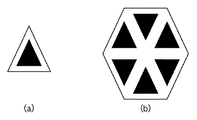
例えば、図1(a)の図形で構成される図1(b)の部分画像に上記(i)、(ii)を実行すると図1(c)の特徴空間が生成される。図1(c)のX軸、Y軸は、部分画像の座標位置に相当する。また、図1(c)のZ軸は、図形の出現確率である。図1(b)のA点には図1(a)の図形が4個接している、B点には2個接している、C点には1個接している。この接している個数に相当する尺度に、図1(c)の特徴空間ではZ軸の大きさを用いている。図1(b)のA,B,Cの各位置に相当する位置でのZ軸の大きさ(確率)は、A点の確率>B点の確率>C点の確率となっており、接している個数の大きさの順番を保っている。
(iii)更に、(ii)の特徴空間を確率の最大値と最小値を用いて正規化する。
(iii)更に、(ii)の特徴空間を確率の最大値と最小値を用いて正規化する。
これにより、部分画像毎の輝度変化に左右されない特徴空間を実現できる。
そこで、本発明では、上記(i)、(ii)、(iii)を実現するために以下を実行した。
ステップ1:マークは同一の小図形で構成されるものとする(図1(b)や図2(b)など)。
ステップ2:フーリエ変換などの直交変換を用いて、マーク画像中の周期的パターンの繰り返し位置とその位置での周期性の強さ(以下、確率分布とする)を求め、強さの最大値と最小値を用いて正規化する。
ステップ3:観測画像中の部分画像毎にステップ2を実行する。
ステップ4:ステップ2で求めたマークの確率分布における特徴のある位置を求める。
ステップ5:ステップ4で求めた位置におけるマークの確率分布の成分及びステップ4で求めた位置における部分画像の確率分布の成分同士の相関度を求める。この操作を全ての部分画像に行う。
ステップ6:ステップ5で求めた相関度が最大の部分画像の位置をマーク位置とする。
ステップ1:マークは同一の小図形で構成されるものとする(図1(b)や図2(b)など)。
ステップ2:フーリエ変換などの直交変換を用いて、マーク画像中の周期的パターンの繰り返し位置とその位置での周期性の強さ(以下、確率分布とする)を求め、強さの最大値と最小値を用いて正規化する。
ステップ3:観測画像中の部分画像毎にステップ2を実行する。
ステップ4:ステップ2で求めたマークの確率分布における特徴のある位置を求める。
ステップ5:ステップ4で求めた位置におけるマークの確率分布の成分及びステップ4で求めた位置における部分画像の確率分布の成分同士の相関度を求める。この操作を全ての部分画像に行う。
ステップ6:ステップ5で求めた相関度が最大の部分画像の位置をマーク位置とする。
[作用及び効果]
図9は、上段に部分画像を他段にその確率分布を示した例である。画像サイズはMxM画素、確率分布のX軸、Y軸は確率変数を、Z軸は確率を示している。
図9は、上段に部分画像を他段にその確率分布を示した例である。画像サイズはMxM画素、確率分布のX軸、Y軸は確率変数を、Z軸は確率を示している。
A1は、理想的なマーク画像とその確率分布である。A2,A3は、実際にCCDカメラから取り込んだマーク画像とその確率分布である。B1,B2は、実際にCCDカメラから取り込んだノイズの多い背景画像とその確率分布である。Cは、実際にCCDカメラから取り込んだ周期的パターンの多い画像とその確率分布である。D,Eは、実際にCCDカメラから取り込んだ画像とその確率分布である。
図9には示していないが、画像のコントラストが変化しても上記画像の確率分布に変化はない。また、画像の平均輝度が変化しても上記画像の確率分布に変化はない。これにより、従来のパターン認識技術(ii)、(iii)の課題(B)を解決できた。
次に、図9ではA1の確率分布と相関の高いA2,A3の確率分布がマークであると判定できる。更に、A1の確率分布とマーク以外の確率分布との相関はA2,A3に比べて非常に低くなり、マーク画像の相関度と他部画像の相関度の差を明確に出来た。これにより、従来のパターン認識技術の課題(A),(C)を解決できた。
よって、劣化画像に対してもロバストなパターン認識を行え、マークの誤検出率の低減につながった。例えば、半導体製造装置では、マーク検出の失敗による装置停止も減少し、装置稼働率と生産性の向上につながった。
本発明の実施態様の例を以下に列挙する。
[実施態様1]
複数個の同一図形から構成されるマークを画像として取り込む画像取り込み手段と、前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出手段と、前記算出手段により算出される確率の二次元的な配置における最大値を示す位置をマーク位置とする位置検出手段とを有することを特徴とする。
複数個の同一図形から構成されるマークを画像として取り込む画像取り込み手段と、前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出手段と、前記算出手段により算出される確率の二次元的な配置における最大値を示す位置をマーク位置とする位置検出手段とを有することを特徴とする。
[実施態様2]
上記実施態様1において、前記算出手段は、前記部分画像領域内に存在する周期的パターンの位置及びその位置でどの程度の確率で周期的パターンが存在するかを示した確率分布と、検出したいマーク画像の確率分布同士の相関度とを算出することにより前記確率を得ることを特徴とする。
上記実施態様1において、前記算出手段は、前記部分画像領域内に存在する周期的パターンの位置及びその位置でどの程度の確率で周期的パターンが存在するかを示した確率分布と、検出したいマーク画像の確率分布同士の相関度とを算出することにより前記確率を得ることを特徴とする。
[実施態様3]
上記実施態様2において、前記算出手段は、特定成分同士の相関値、或いは、確率分布のパワースペクトラムにおける特定成分同士の相関値、或いは、確率分布若しくは確率分布のパワースペクトラムの特定成分の寄与率同士の相関値を算出することにより前記確率分布同士の相関度を得ることを特徴とする。
上記実施態様2において、前記算出手段は、特定成分同士の相関値、或いは、確率分布のパワースペクトラムにおける特定成分同士の相関値、或いは、確率分布若しくは確率分布のパワースペクトラムの特定成分の寄与率同士の相関値を算出することにより前記確率分布同士の相関度を得ることを特徴とする。
[実施態様4]
上記実施態様2において、前記算出手段は、部分画像を直交変換をすることで得られる周波数領域のエネルギー分布を算出する第1のエネルギー分布算出手段と、前記第1のエネルギー分布算出手段により得られる周波数領域のエネルギー分布を当該第1のエネルギー分布算出手段で用いた直交変換の逆変換をすることで得られる実空間のエネルギー分布を算出する第2のエネルギー分布算出手段とを有することを特徴とする。
上記実施態様2において、前記算出手段は、部分画像を直交変換をすることで得られる周波数領域のエネルギー分布を算出する第1のエネルギー分布算出手段と、前記第1のエネルギー分布算出手段により得られる周波数領域のエネルギー分布を当該第1のエネルギー分布算出手段で用いた直交変換の逆変換をすることで得られる実空間のエネルギー分布を算出する第2のエネルギー分布算出手段とを有することを特徴とする。
[実施態様5]
上記実施態様4において、前記周波数領域のエネルギー分布は、離散フーリエ変換、離散ウェーヴレット変換、2次元離散コサイン変換、2次元離散サイン変換の少なくとも1つを用いて算出されることを特徴とする。
上記実施態様4において、前記周波数領域のエネルギー分布は、離散フーリエ変換、離散ウェーヴレット変換、2次元離散コサイン変換、2次元離散サイン変換の少なくとも1つを用いて算出されることを特徴とする。
[実施態様6]
上記実施態様4において、前記実空間のエネルギー分布は、離散逆フーリエ変換、離散逆ウェーヴレット変換、2次元離散逆コサイン変換、2次元逆離散サイン変換の少なくとも1つを用いて算出されることを特徴とする。
上記実施態様4において、前記実空間のエネルギー分布は、離散逆フーリエ変換、離散逆ウェーヴレット変換、2次元離散逆コサイン変換、2次元逆離散サイン変換の少なくとも1つを用いて算出されることを特徴とする。
[実施態様7]
上記実施態様4において、前記周波数領域のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする。
上記実施態様4において、前記周波数領域のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする。
[実施態様8]
上記実施態様4において、前記実空間のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする。
上記実施態様4において、前記実空間のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする。
[実施態様9]
上記実施態様3において、前記特定成分は、テンプレート用マークの画像における確率分布、或いは、確率分布のパワースペクトラム、或いは、確率分布若しくは確率分布のパワースペクトラムの特徴を示す位置の値を要素としたベクトルであることを特徴とする。
上記実施態様3において、前記特定成分は、テンプレート用マークの画像における確率分布、或いは、確率分布のパワースペクトラム、或いは、確率分布若しくは確率分布のパワースペクトラムの特徴を示す位置の値を要素としたベクトルであることを特徴とする。
[実施態様10]
複数個の同一図形から構成されるマークを画像として取り込む画像取り込み工程と、前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出工程と、前記算出工程における確率の二次元的な配置における最大値を示す位置をマーク検出位置とする位置検出工程とを有することを特徴とする。
複数個の同一図形から構成されるマークを画像として取り込む画像取り込み工程と、前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出工程と、前記算出工程における確率の二次元的な配置における最大値を示す位置をマーク検出位置とする位置検出工程とを有することを特徴とする。
[実施態様11]
対象物上に形成されたマークを撮像する撮像手段と、前記撮像手段により得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出手段と、前記算出手段により得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出手段とを有することを特徴とする。
対象物上に形成されたマークを撮像する撮像手段と、前記撮像手段により得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出手段と、前記算出手段により得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出手段とを有することを特徴とする。
[実施態様12]
上記実施態様11において、前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布のパワースペクトルに基づいて前記相関度を算出することを特徴とする。
上記実施態様11において、前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布のパワースペクトルに基づいて前記相関度を算出することを特徴とする。
[実施態様13]
上記実施態様12において、前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布を各要素値の和により正規化して得られる各分布に基づいて前記相関度を算出することを特徴とする。
上記実施態様12において、前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布を各要素値の和により正規化して得られる各分布に基づいて前記相関度を算出することを特徴とする。
[実施態様14]
上記実施態様11乃至13のいずれかの位置検出装置を含むことを特徴とする露光装置。
上記実施態様11乃至13のいずれかの位置検出装置を含むことを特徴とする露光装置。
[実施態様15]
対象物上に形成されたマークを撮像する撮像工程と、前記撮像工程において得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出工程と、前記第1算出工程において得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出工程とを有することを特徴とする。
対象物上に形成されたマークを撮像する撮像工程と、前記撮像工程において得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出工程と、前記第1算出工程において得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出工程とを有することを特徴とする。
以上説明したように、本発明によれば、上記従来のパターン認識技術の原理的な弱みを解決し、マークの誤検出を低減できる。
以下、本発明に係る実施の形態について、添付図面を参照して詳細に説明する。
なお、下記の実施形態では、特に半導体露光装置を例にとり、観測画像全体からマークの大まかな位置検出方法(以下、プリアライメント検出とする)を説明する。また、CCDカメラなどの画像入力装置から取り込まれた観測画像は、輝度画像とする。
[第1実施形態]
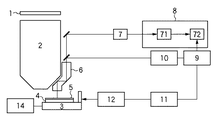
図3に半導体露光装置の概略構成を示したもので、本発明の第1実施形態は図3のオフアクシススコープ6によるプリアライメント検出に対して適用したものである。
図3に半導体露光装置の概略構成を示したもので、本発明の第1実施形態は図3のオフアクシススコープ6によるプリアライメント検出に対して適用したものである。
露光対象パターンはレチクル1上に存在し、不図示の照明系でI線あるいはエキシマレーザ光を使って照明され、投影レンズ2によりウエハ5に露光される。
プリアライメントはウエハ5が不図示のウエハ搬送装置によって、XYステージ3上のウエハ吸着チャック4に載せられてから行われる。ウエハ5はチャック4上に搬送装置の精度で載せられているため、精度上そのままウエハの精密な位置計測に移行することはできない。その為、ウエハ上のプリアライメント(粗合わせ)用の検出マークを投影レンズ2の外側に構成されるオフアクシススコープ6で観察し、CCDカメラ7で光電変換した後、プリアライメント画像処理装置8で検出マークの位置情報を検出する。プリアライメント画像処理装置8内では、光電変換されたビデオ信号をA/D変換装置71でデジタル情報にし、画像メモリを有する画像処理プロセッサ72でプリアライメントマーク位置の検出を行なう。
プリアライメントマークの画像を取り込んだときのXYステージ3の位置はレーザ干渉計12によって正確に測定されており、露光装置制御装置9がマーク位置のずれとXYステージ3の位置から、チャック4上に置かれているウエハ5のずれ量を正しく計測する。
本実施形態ではオフアクシススコープの照明として暗視野照明を用いて説明する。暗視野照明ではマーク段差のエッジ位置からの散乱光がCCDカメラなどで受光されるが、本発明は明視野照明にも同様に適用できる。
次に、本実施形態のプリアライメント検出に係わるマークについて述べる。
図1(a)、図2(a)はマークを構成する小図形の例である。図1(b)、図2(b)は図1(a)、図2(a)の小図形から構成されるマークの例である。
以下に、本実施形態の位置検出装置及びその位置検出装置を用いた半導体露光装置におけるプリアライメント検出の処理手順を図4を参照して説明する。
図4は処理手順のフローチャートを示す。
図4において、先ず、予め登録しておいたマーク用の画像を記憶装置から読み込む(S4100)。
そして、この画像を変数Imgに代入する(S4101)。
次に、S4101の画像Img中の周期的パターンの繰り返し位置とその位置での周期的繰り返しの強さを示す確率分布を算出する(S4102)。
このS4102の確率分布をマークの確率分布とする(S4103)。
次に、部分画像の確率分布を以下の手順で算出する。
CCDカメラなどの画像入力装置から観測画像を読み込む(S4104)。
観測画像から部分画像を取り出す(S4106)。
取り出した部分画像を変数Imgに代入する(S4107)。
そして、S4107の画像Img中の周期的パターンの繰り返し位置とその位置での周期的繰り返しの強さを示す確率分布を算出する(S4108)。
このS4108の確率分布を部分画像の確率分布とする(S4109)。
予め登録しておいた着目位置を記憶装置から読み込む(S4110)。
S4110の着目位置に対応するS4103でのマークの確率分布の値と、S4110の着目位置に対応するS4109での部分画像の確率分布の値とを用いて相関度を算出し、この相関度を部分画像の位置での相関度とする(S4111)。
S4106からS4111までの操作を取り出す部分画像がなくなるまで行う(S4105)。
最後に、S4100からS4111での操作を行って得られた観測画像の位置に対応した相関度分布の値で、最大値を示す位置をマーク位置とする(S4112)。
図5は、図4のS4102及びS4108の画像Img中の周期的パターンの繰り返し位置とその位置での周期的繰り返しの強さを示す確率分布を算出する(以下、確率分布算出とする)処理手順を示す。以下では、図5に従って確率分布算出の方法について説明する。
まず、図4のS4101あるいは図4のS4107の変数Imgを画像データ(以下、画像行列Imgとする)として読み込む(S5100)。
次に、周波数分解し周波数位置での周期的パターンの繰り返しの強さを分布として抽出し、この分布を実空間に戻すことで画素位置での周期的パターンの繰り返しの強さを示す分布を得ることをS5101〜S5106で行う。
S5100の画像の行列Imgを2次元離散フーリエ変換した行列(以下、フーリエ変換行列とする)を算出する(S5101)。
このフーリエ変換行列の共役複素行列(以下、共役複素行列とする)を算出する(S5102)。
そして、フーリエ変換行列と共役複素行列の対応する要素同士の乗算により周波数領域のエネルギー分布を算出し、その分布を正規化した行列(以下、正規化エネルギースペクトル分布とする)を算出する(S5103)。
S5103の正規化エネルギースペクトル分布の2次元逆離散フーリエ変換により実空間のエネルギー分布(以下、複素実空間エネルギー分布とする)を算出する(S5104)。
S5104の複素実空間エネルギー分布の絶対値をとり実部のみにする(以下、実空間エネルギー分布とする)を算出する(S5105)。
S5105の実空間エネルギー分布をこの分布の最大値と最小値で正規化した分布を算出し、画像Imgの確率分布とする(S5106)。
S5101〜S5106では、2次元離散フーリエ変換と2次元離散逆フーリエ変換を用いて、周波数分解し周波数位置での周期的パターンの繰り返しの強さを分布として抽出し、この分布を実空間に戻すことで画素位置での周期的パターンの繰り返しの強さを示す分布を得ることを行ったが、以下のような直交変換を用いても等価な処理を実現できる。つまり、2次元離散ウェーヴレット変換と2次元離散逆ウェーヴレット変換、2次元離散コサイン変換と2次元離散逆コサイン変換、2次元離散サイン変換と2次元離散逆サイン変換などである。
図6に、図4のS4111の処理手順(以下、確率分布同士の相関度算出とする)を示す。この手順に従って、確率分布同士の相関度算出の方法について説明する。
まず、図4のマークの確率分布と部分画像の確率分布を読み込む(S6100)。
次に、S4110で読み込んだ着目位置情報を読み込む。但し、この着目位置は確率分布上の位置である(S6101)。
そして、着目位置情報に対応するマークの確率分布上の各値を要素としたベクトル(以下 特定成分ベクトルHとする)を算出する(S6102)。
更に、着目位置情報に対応する部分画像の確率分布上の各値を要素としたベクトル(以下、特定成分ベクトルDとする)を算出する(S6103)。
最後に、特定成分ベクトルHと特定成分ベクトルDの相関度を算出する(S6104)。
[第2実施形態]
本実施形態では、確率分布同士の相関度算出に関して、上記[第一実施形態]で説明した図6とは異なる方法での算出方法を実施した。
本実施形態では、確率分布同士の相関度算出に関して、上記[第一実施形態]で説明した図6とは異なる方法での算出方法を実施した。
[第1実施形態]とは、確率分布同士の相関度算出の処理手順が異なる。以下には、確率分布同士の相関度算出方法のみを示す。
図7に、図4のS4111の処理手順を示す。この手順に従って、確率分布同士の相関度算出の方法を説明する。
まず、図4のマークの確率分布と部分画像の確率分布を読み込む(S7100)。
次に、マークの確率分布のパワースペクトラムと部分画像の確率分布のパワースペクトラムを算出する(S7101)。
そして、S4110で読み込んだ着目位置情報を読み込む。但し、この着目位置はパワースペクトラムの空間上での周波数位置である(S7102)。
それから、着目位置情報に対応するマーク確率分布のパワースペクトラム空間上の各値を要素としたベクトル(以下、特定成分ベクトルPHとする)を算出する(S7103)。
更に、着目位置情報に対応する部分画像確率分布のパワースペクトラム空間上の各値を要素としたベクトル(以下、特定成分ベクトルPDとする)を算出する(S7104)。
最後に、特定成分ベクトルPHと特定成分ベクトルPDの相関度を算出する(S7105)。
[第3実施形態]
本実施形態では、確率分布同士の相関度算出に関して、上記[第1実施形態]、[第2実施形態]で説明した図6とは異なる方法での算出方法を実施した。 [第一実施形態]、[第二実施形態]とは、確率分布同士の相間度算出の処理手順が異なる。以下には、確率分布同士の相関度算出方法のみを示す。
本実施形態では、確率分布同士の相関度算出に関して、上記[第1実施形態]、[第2実施形態]で説明した図6とは異なる方法での算出方法を実施した。 [第一実施形態]、[第二実施形態]とは、確率分布同士の相間度算出の処理手順が異なる。以下には、確率分布同士の相関度算出方法のみを示す。
図8に、図4のS4111の処理手順を示す。この手順に従って、確率分布同士の相関度算出の方法を説明する。
まず、図4のマークの確率分布と部分画像の確率分布を読み込む(S8100)。
次に、S4110で読み込んだ着目位置情報を読み込む。但し、この着目位置は確率分布上の位置である(S8101)。
そして、着目位置情報に対応するマーク確率分布値の和に対する着目位置情報に対応する各値の割合(寄与率)を要素としたベクトル(以下、寄与率ベクトルCH とする)を算出する(S8102)。
更に、着目位置情報に対応する部分画像の確率分布値の和に対する着目位置情報に対応する各値の割合(寄与率)を要素としたベクトル(以下、寄与率ベクトルCDとする)を算出する(S8103)。
最後に、寄与率ベクトルCHと寄与率ベクトルCDの相関度を算出する(S8104)。
[他の実施形態]
本発明の目的は、前述した実施形態の確率分布算出の方法を含む位置検出方法又は露光方法等を実現するソフトウェアのプログラムを、システム或いは装置に直接或いは遠隔から供給し、そのシステム或いは装置のコンピュータが該供給されたプログラムコードを読み出して実行することによっても達成され、その場合も本発明の実施形態に含まれる。その場合、プログラムの機能を有していれば、形態は、プログラムである必要はない。
本発明の目的は、前述した実施形態の確率分布算出の方法を含む位置検出方法又は露光方法等を実現するソフトウェアのプログラムを、システム或いは装置に直接或いは遠隔から供給し、そのシステム或いは装置のコンピュータが該供給されたプログラムコードを読み出して実行することによっても達成され、その場合も本発明の実施形態に含まれる。その場合、プログラムの機能を有していれば、形態は、プログラムである必要はない。
従って、本発明の機能処理をコンピュータで実現するために、該コンピュータにインストールされるプログラムコード自体も本発明を実現するものである。つまり、本発明の機能処理を実現するためのコンピュータプログラム自体も本発明の実施形態に含まれる。
その場合、プログラムの機能を有していれば、オブジェクトコード、インタプリタにより実行されるプログラム、OSに供給するスクリプトデータ等、プログラムの形態を問わない。
プログラムを供給するための記録媒体としては、例えば、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、MO、CD−ROM、CD−R、CD−RW、磁気テープ、不揮発性のメモリカード、ROM、DVD(DVD−ROM、DVD−R)などがある。
また、当該プログラムの供給方法としては、例えば、クライアントコンピュータのブラウザを用いてインターネットのホームページに接続させ、該ホームページから本発明のコンピュータプログラムそのもの、もしくは圧縮され自動インストール機能を含むファイルをハードディスク等の記録媒体にダウンロードさせることによっても可能である。また、本発明のプログラムを構成するプログラムコードを複数のファイルに分割し、それぞれのファイルを異なるホームページからダウンロードさせることによっても可能である。つまり、本発明の機能処理をコンピュータで実現するためのプログラムファイルを複数のユーザに対してダウンロードさせるWWWサーバも、本発明の実施形態に含まれるものである。
また、本発明のプログラムを暗号化してCD−ROM等の記憶媒体に格納してユーザに配布し、所定の条件をクリアしたユーザに対し、インターネットを介してホームページから暗号化を解く鍵情報をダウンロードさせ、その鍵情報を使用することにより暗号化されたプログラムを実行してコンピュータにインストールさせることによっても、当該プログラムの供給は可能である。
また、コンピュータが、読み出したプログラムを実行することによって、前述した実施形態の機能が実現される他、そのプログラムの指示に基づき、コンピュータ上で稼動しているOSなどが、実際の処理の一部または全部を行なうことによっても前述した実施形態の機能は実現され得る。
さらに、記録媒体から読み出されたプログラムが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行なうことよっても前述した実施形態の機能は実現さ得る。
1 レチクル
2 投影レンズ
3 ステージ
4 ウエハチャック
5 ウエハ
6 オフアクシススコープ
7 CCDカメラ
8 画像処理装置
9 露光装置制御装置
10 照明装置
11 レーザ干渉計計測部
12 レーザ干渉計
51 プリアライメントマーク
52 検出位置
71 A/D変換装置
72 画像処理装置プロセッサ
2 投影レンズ
3 ステージ
4 ウエハチャック
5 ウエハ
6 オフアクシススコープ
7 CCDカメラ
8 画像処理装置
9 露光装置制御装置
10 照明装置
11 レーザ干渉計計測部
12 レーザ干渉計
51 プリアライメントマーク
52 検出位置
71 A/D変換装置
72 画像処理装置プロセッサ
Claims (15)
- 複数個の同一図形から構成されるマークを画像として取り込む画像取り込み手段と、
前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出手段と、
前記算出手段により算出される確率の二次元的な配置における最大値を示す位置をマーク位置とする位置検出手段とを有することを特徴とする位置検出装置。 - 前記算出手段は、前記部分画像領域内に存在する周期的パターンの位置及びその位置でどの程度の確率で周期的パターンが存在するかを示した確率分布と、検出したいマーク画像の確率分布同士の相関度とを算出することにより前記確率を得ることを特徴とする請求項1に記載の位置検出装置。
- 前記算出手段は、特定成分同士の相関値、或いは、確率分布のパワースペクトラムにおける特定成分同士の相関値、或いは、確率分布若しくは確率分布のパワースペクトラムの特定成分の寄与率同士の相関値を算出することにより前記確率分布同士の相関度を得ることを特徴とする請求項2に記載の位置検出装置。
- 前記算出手段は、部分画像を直交変換をすることで得られる周波数領域のエネルギー分布を算出する第1のエネルギー分布算出手段と、
前記第1のエネルギー分布算出手段により得られる周波数領域のエネルギー分布を当該第1のエネルギー分布算出手段で用いた直交変換の逆変換をすることで得られる実空間のエネルギー分布を算出する第2のエネルギー分布算出手段とを有することを特徴とする請求項2に記載の位置検出装置。 - 前記周波数領域のエネルギー分布は、離散フーリエ変換、離散ウェーヴレット変換、2次元離散コサイン変換、2次元離散サイン変換の少なくとも1つを用いて算出されることを特徴とする請求項4に記載の位置検出装置。
- 前記実空間のエネルギー分布は、離散逆フーリエ変換、離散逆ウェーヴレット変換、2次元離散逆コサイン変換、2次元逆離散サイン変換の少なくとも1つを用いて算出されることを特徴とする請求項4に記載の位置検出装置。
- 前記周波数領域のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする請求項4に記載の位置検出装置。
- 前記実空間のエネルギー分布は、最大値及び最小値で正規化されていることを特徴とする請求項4に記載の位置検出装置。
- 前記特定成分は、テンプレート用マークの画像における確率分布、或いは、確率分布のパワースペクトラム、或いは、確率分布若しくは確率分布のパワースペクトラムの特徴を示す位置の値を要素としたベクトルであることを特徴とする請求項3に記載の位置検出装置。
- 複数個の同一図形から構成されるマークを画像として取り込む画像取り込み工程と、
前記画像中の部分画像領域毎に、前記マークを構成する前記図形が所定の位置に存在する確率を算出する算出工程と、
前記算出工程における確率の二次元的な配置における最大値を示す位置をマーク検出位置とする位置検出工程とを有することを特徴とする位置検出方法。 - 対象物上に形成されたマークを撮像する撮像手段と、
前記撮像手段により得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出手段と、
前記算出手段により得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出手段とを有することを特徴とする位置検出装置。 - 前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布のパワースペクトルに基づいて前記相関度を算出することを特徴とする請求項11に記載の位置検出装置。
- 前記第2算出手段は、前記相関度を算出する対象となる各エネルギー分布を各要素値の和により正規化して得られる各分布に基づいて前記相関度を算出することを特徴とする請求項12に記載の位置検出装置。
- 請求項11乃至13のいずれか1項に記載の位置検出装置を含むことを特徴とする露光装置。
- 対象物上に形成されたマークを撮像する撮像工程と、
前記撮像工程において得られた前記マークの画像の部分画像を直交変換することにより周波数空間におけるエネルギー分布を得、該エネルギー分布を逆直交変換することにより実空間におけるエネルギー分布を得る第1算出工程と、
前記第1算出工程において得られたエネルギー分布と、予め得られた前記マークのエネルギー分布との相関度を算出する第2算出工程とを有することを特徴とする位置検出方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003345890A JP2005116626A (ja) | 2003-10-03 | 2003-10-03 | 位置検出装置及び位置検出方法、並びに露光装置 |
| US10/952,765 US7418125B2 (en) | 2003-10-03 | 2004-09-30 | Position detection technique |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003345890A JP2005116626A (ja) | 2003-10-03 | 2003-10-03 | 位置検出装置及び位置検出方法、並びに露光装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005116626A true JP2005116626A (ja) | 2005-04-28 |
| JP2005116626A5 JP2005116626A5 (ja) | 2006-11-16 |
Family
ID=34386352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003345890A Withdrawn JP2005116626A (ja) | 2003-10-03 | 2003-10-03 | 位置検出装置及び位置検出方法、並びに露光装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7418125B2 (ja) |
| JP (1) | JP2005116626A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018508039A (ja) * | 2015-02-28 | 2018-03-22 | シャンハイ マイクロ エレクトロニクス イクイプメント(グループ)カンパニー リミティド | 基板プリアライメント方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006005242A (ja) * | 2004-06-18 | 2006-01-05 | Canon Inc | 画像処理装置、画像処理方法、露光装置、およびデバイス製造方法 |
| JP2006216865A (ja) * | 2005-02-04 | 2006-08-17 | Canon Inc | 判別方法及び装置、露光装置、並びにデバイス製造方法 |
| JP4891712B2 (ja) * | 2006-09-05 | 2012-03-07 | 株式会社日立ハイテクノロジーズ | 類似度分布を利用したテンプレートマッチング方法を用いた検査装置 |
| US8086043B2 (en) * | 2007-12-21 | 2011-12-27 | Ati Technologies Ulc | System and method of image correlation based on image structure |
| JP5058002B2 (ja) * | 2008-01-21 | 2012-10-24 | 株式会社豊田中央研究所 | 物体検出装置 |
| US20100166257A1 (en) * | 2008-12-30 | 2010-07-01 | Ati Technologies Ulc | Method and apparatus for detecting semi-transparencies in video |
| KR101914101B1 (ko) * | 2011-06-28 | 2018-11-02 | 삼성전자 주식회사 | 척의 제어 장치 및 방법, 노광 장치 및 그 제어 방법 |
| RU2659967C2 (ru) | 2012-10-26 | 2018-07-04 | МЭППЕР ЛИТОГРАФИ АйПи Б.В. | Способ определения положения подложки в системе литографии, подложка для использования в таком способе и система литографии для выполнения такого способа |
| US10223800B2 (en) | 2014-03-28 | 2019-03-05 | Hewlett-Packard Development Company, L.P. | Determine presence of quasi-periodic two-dimensional object |
| US9484188B2 (en) * | 2015-03-11 | 2016-11-01 | Mapper Lithography Ip B.V. | Individual beam pattern placement verification in multiple beam lithography |
| TWI583174B (zh) * | 2016-07-06 | 2017-05-11 | 虹光精密工業股份有限公司 | 具有影像移動及塡補功能的影像處理裝置、複印設備及複印方法 |
| EP3714400A1 (en) * | 2017-11-24 | 2020-09-30 | Ecole Polytechnique Federale De Lausanne (Epfl) | Method of handwritten character recognition confirmation |
| CN110827432B (zh) * | 2019-11-11 | 2021-12-28 | 深圳算子科技有限公司 | 一种基于人脸识别的课堂考勤方法及系统 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07120621B2 (ja) * | 1989-05-08 | 1995-12-20 | キヤノン株式会社 | 位置合せ方法 |
| US5841520A (en) * | 1995-08-09 | 1998-11-24 | Nikon Corporatioin | Exposure apparatus and method that use mark patterns to determine image formation characteristics of the apparatus prior to exposure |
| JPH10242041A (ja) * | 1997-02-26 | 1998-09-11 | Nikon Corp | 位置検出方法及びその装置並びに露光装置 |
| US6225639B1 (en) * | 1999-08-27 | 2001-05-01 | Agere Systems Guardian Corp. | Method of monitoring a patterned transfer process using line width metrology |
| JP4532640B2 (ja) | 2000-01-14 | 2010-08-25 | キヤノン株式会社 | 位置検出装置及びそれを用いた露光装置 |
| US6559953B1 (en) * | 2000-05-16 | 2003-05-06 | Intel Corporation | Point diffraction interferometric mask inspection tool and method |
| US7068833B1 (en) * | 2000-08-30 | 2006-06-27 | Kla-Tencor Corporation | Overlay marks, methods of overlay mark design and methods of overlay measurements |
| JP3486606B2 (ja) * | 2000-09-08 | 2004-01-13 | キヤノン株式会社 | 回折光学素子およびそれを用いた光学系 |
| JP2003315973A (ja) * | 2002-04-19 | 2003-11-06 | Fujitsu Ltd | マスク設計装置、マスク設計方法、プログラムおよび半導体装置製造方法 |
-
2003
- 2003-10-03 JP JP2003345890A patent/JP2005116626A/ja not_active Withdrawn
-
2004
- 2004-09-30 US US10/952,765 patent/US7418125B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018508039A (ja) * | 2015-02-28 | 2018-03-22 | シャンハイ マイクロ エレクトロニクス イクイプメント(グループ)カンパニー リミティド | 基板プリアライメント方法 |
| US10416578B2 (en) | 2015-02-28 | 2019-09-17 | Shanghai Micro Electronics Equipment (Group) Co., Ltd. | Substrate pre-alignment method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050074160A1 (en) | 2005-04-07 |
| US7418125B2 (en) | 2008-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005116626A (ja) | 位置検出装置及び位置検出方法、並びに露光装置 | |
| US7925076B2 (en) | Inspection apparatus using template matching method using similarity distribution | |
| KR100554639B1 (ko) | 패턴검사방법과 장치 및 패턴정렬방법 | |
| KR100821038B1 (ko) | 차분 비교 검사방법 및 차분 비교 검사장치 | |
| JP4910128B2 (ja) | 対象物表面の欠陥検査方法 | |
| JP2009294027A (ja) | パターン検査装置及び方法 | |
| KR20150041439A (ko) | 패턴의 선폭 측정 장치 및 그 방법 | |
| JP4532640B2 (ja) | 位置検出装置及びそれを用いた露光装置 | |
| JP3047881B2 (ja) | 半導体装置の製造システム及び半導体装置の製造方法 | |
| JP2005182164A (ja) | 画像領域判定方法、ならびにその方法を利用可能な画像領域判定装置、画像補正装置および電子透かし抽出装置 | |
| JP2009047458A (ja) | 回路パターン検査装置および検査方法 | |
| KR20080011635A (ko) | 결함 검출을 위한 방법 및 시스템 | |
| JP6326243B2 (ja) | 画像処理装置および立体形状計測装置 | |
| JP2675167B2 (ja) | パターン認識方法 | |
| JP2007101493A (ja) | 位置検出装置 | |
| JP2002198406A (ja) | 外観検査方法 | |
| JP4484041B2 (ja) | エッジ位置検出装置 | |
| JP3182517B2 (ja) | 欠陥検出装置及びその方法 | |
| JP2926118B2 (ja) | 欠陥検出方法 | |
| JP3447717B2 (ja) | 画像処理装置 | |
| JP2006214817A (ja) | 半導体検査装置 | |
| JP3262030B2 (ja) | 欠陥検出装置 | |
| JP3570201B2 (ja) | 画像認識装置および画像認識方法 | |
| JP2007317013A (ja) | 位置検出装置 | |
| Mahdian et al. | Determination of stop-criterion for incremental methods constructing camera sensor fingerprint |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060929 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060929 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090309 |