JP2005057222A - マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス - Google Patents
マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス Download PDFInfo
- Publication number
- JP2005057222A JP2005057222A JP2003289427A JP2003289427A JP2005057222A JP 2005057222 A JP2005057222 A JP 2005057222A JP 2003289427 A JP2003289427 A JP 2003289427A JP 2003289427 A JP2003289427 A JP 2003289427A JP 2005057222 A JP2005057222 A JP 2005057222A
- Authority
- JP
- Japan
- Prior art keywords
- mark
- detection
- wafer
- light
- alignment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




















Abstract
【課題】
被処理体の表面状態による影響を殆ど受けることなく高精度にマーク位置検出を行ってAGA方式によるアライメントを行うのに適した位置検出マークを選択することができるマーク位置検出装置を提供すること。
【解決手段】
このマーク検出装置1は、ウエハ2の表面2aに形成されたアライメントマークMに表面2aから表面光10aを照射する表面側光源10と、表面光10aのアライメントマークMからの反射光を検出する表面側CCD17と、アライメントマークMにウエハ2を通して裏面2bから裏面光20aを照射する裏面側光源20と、裏面光20aのアライメントマークMからの反射光を検出する裏面側CCD27と、表面側CCD17の検出結果と裏面側CCD27の検出結果との差分を算出し、その差分に基づいてアライメントマークMの中から所定のアライメントマークMを選択する信号処理部41とを有する。
【選択図】 図1
被処理体の表面状態による影響を殆ど受けることなく高精度にマーク位置検出を行ってAGA方式によるアライメントを行うのに適した位置検出マークを選択することができるマーク位置検出装置を提供すること。
【解決手段】
このマーク検出装置1は、ウエハ2の表面2aに形成されたアライメントマークMに表面2aから表面光10aを照射する表面側光源10と、表面光10aのアライメントマークMからの反射光を検出する表面側CCD17と、アライメントマークMにウエハ2を通して裏面2bから裏面光20aを照射する裏面側光源20と、裏面光20aのアライメントマークMからの反射光を検出する裏面側CCD27と、表面側CCD17の検出結果と裏面側CCD27の検出結果との差分を算出し、その差分に基づいてアライメントマークMの中から所定のアライメントマークMを選択する信号処理部41とを有する。
【選択図】 図1
Description
本発明は、被処理体の表面に形成された位置検出用マークを検出するマーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイスに係り、特に、半導体の製造に用いられるシリコンウエハ表面に形成されたアライメントマークを検出するマーク検出装置等に関する。
本発明は、例えば、半導体製造用の露光装置において、露光原版としてのレチクル面上に形成されているIC,LSI,VLSI等の微細な電子回路パターンと被処理体としてのシリコンウエハとの相対的な位置合わせ(アライメント)を、いわゆるグローバルアライメントによって行う際のアライメントマークの検出に適している。
半導体製造用の投影露光装置においては、集積回路の微細化、高密度化に伴い露光原版としてのレチクル面上の回路パターンを被処理体としてのシリコンウエハ(以下、ウエハと略す。)面上により高い解像力で投影露光できることが要求されている。この露光装置には、例えばステッパーと呼ばれるもの(ステップ・アンド・リピートにより各ショットを一括露光するもの)やスキャナーと呼ばれるもの(ステップ・アンド・スキャンにより各ショットを走査露光するもの)がある。
ステッパーやスキャナー等の露光装置においては、レチクルとウエハとの位置調整(いわゆるアライメント)が重要となる。一般に、これらの露光装置においては、オフアクシス方式のアライメント方法が多く用いられている。このオフアクシス方式のアライメント方法とは、レチクル上のアライメントマークとウエハ上のアライメントマークとを照明してそれぞれのアライメントマークからの反射光を検出手段により検出し、画像処理手段によってそれぞれのアライメントマーク位置を算出して所定の基準位置との相対位置ずれをレチクル・ウエハのそれぞれにおいて算出して相対的な位置調整を行うものである。ここで、アライメントマークとは、位置調整の際の基準とするためにレチクルやウエハに形成された精密微細なマーク(図2、図3参照)のことであり、一般にウエハ等の表面にエッチング等によって形成されるものである。
図16にオフアクシス方式のアライメント方法を行うための装置構成の例を示す。この装置によれば、ハロゲン光などの光源101からの光を光ファイバ102を介して照明光学系103によってウエハ104に照射する。ウエハ104上のアライメントマーク(以下、マークと略す。)からの反射光を検出光学系105を介してCCDカメラ等の撮像手段106を用いて撮像する。撮像画像をビデオ信号に変換し、そのビデオ信号を用いて図示しない画像処理手段によってマークの位置を算出する。また、マーク検出手段としては、図16に示す明視野照明を使用した装置構成のもの以外にも、例えば位相差干渉を用いた装置構成のものもある。
ウエハ上のマークは、ウエハ上に配置された複数のショット領域(チップパターン)の領域間であるスクライブライン内に形成されている。このウエハ上のマーク位置を上述のオフアクシス方式のアライメント方法によって検出する方法を一般にウエハアライメントという。このウエハアライメントにおいては、ウエハ上に2次元配列された複数のショット領域に対応する複数のマークの位置検出を行い、その検出結果に基づいてウエハの位置調整を行って各ショット領域の露光を順次行ういわゆるグローバルアライメント方式が主流となっている。
グローバルアライメント方式の利点として、マーク位置の検出値の中で明らかに異常値と思われる検出値を除去することが可能である点、検出値が複数であるため平均化効果が期待できる点、等がある。グローバルアライメント方式によってマーク位置が精密に検出され、さらにその検出結果に基づく位置補正が精密に行われれば、露光におけるアライメント誤差を大幅に低減することができて望ましい。そのため、グローバルアライメント方式においては、マークの形状誤差を原因とする検出異常値や、他の検出値と比較して大きく傾向の異なる検出値を除外してアライメントが行われる。
キヤノン株式会社(メーカー名)製のステッパーにおいて採用されるグローバルアライメント方式はAGA(Advanced Global Alignment)方式と呼ばれ、そのAGA方式において検出されるマークに対応するショットはAGAショットと呼ばれる。以下、グローバルアライメント方式をAGA方式と、AGA方式において選択的に検出されるマークに対応するショット領域をAGAショットということとする。
AGA方式においては、ウエハ上の複数ショット領域の中から所定のAGAショットを選択し、それに対応するマーク位置検出を行うことを特徴としている。図17はAGA方式において、ウエハ104から選択される所定のAGAショット107を示す図である。AGA方式においては、この図の斜線で示したAGAショット107に対応するマークの位置を検出する。
AGA方式においては、マーク位置検出のためにどのAGAショット107を選択するかが重要である。なぜならば、AGAショット107に対応するマークの検出結果に基づいてウエハ104全体の統計処理計算を行うので、そのマークの検出誤差がウエハ104全体の位置検出誤差に影響するからである。したがって、AGA方式における検出精度を向上させるためには、選択されたAGAショット107に対応するマークすべての位置検出精度を向上させる必要があり、検出異常値の除外等の処理のみでは充分とは言えない。
ウエハ上のマーク位置検出の誤差要因となるものに、アライメント光学系の収差等に起因する装置要因誤差としてのTIS(Tool Induced Shift)と、半導体プロセス要因であって検出信号の非対称性による誤差としてのWIS(Wafer Induced Shift)とがある。このWISが発生する要因としては、ウエハ表面に塗布されるレジストパターンの非対称性、マークの段差(エッジ)部分のテーパ形状、左右のエッジ部分の傾斜の相違、平面度の部分的な変動、装置要因との相乗効果による検出信号シフト等が考えられる。例えば、ウエハ上のマークからの画像検出信号(ラインセンサ等の1次元センサからの信号の場合もある)が歪んでしまい、その対称性が失われてしまう場合がある(例えば、特許文献1参照)。一方、アライメント用投影光学系のレンズの色収差の影響を防止するために、ウエハの裏面側からマークを観察するものもある(例えば、特許文献2)。
特公平6−50714号公報
特開平1−164032号公報
上記の特許文献1に開示のものは、ウエハ表面に塗布されているレジストの種類や塗布状況等によって検出結果にさまざまな影響が生じてしまうという問題がある。すなわち、アライメント光のレジスト表面での反射光、アライメント光のレジスト内での屈折と多重反射、アライメント光のマークエッジ部での回折、レジスト表面での反射光とレジスト内多重反射光との相互干渉等により、マーク位置検出結果が変動してしまう場合がある。したがって、従来のAGA方式においては、レジストに起因するマーク位置検出信号の歪みを生じてしまい、その結果、アライメント精度が劣化してしまう場合があった。
例えば、ウエハ104の表面にレジストを回転塗布した場合、ウエハ104表面には図18に示すような回転方向の塗布ムラ108や図19に示すような放射方向の塗布ムラ109が生じてしまう場合がある。このような塗布ムラ108,109が生じると、ウエハ104の表面では位置によってレジストの厚さや光の反射状態が異なってしまう。それにより、選択するAGAショット107の位置によってはマークの位置検出結果に誤差を生じてしまうという問題がある。また、凹状に形成されたマークのエッジを検出する際に、そのエッジ部分が傾斜している場合は、どの程度の深さ位置を基準として検出するかによっても検出位置に誤差を生じてしまう場合がある。
ウエハ104の表面研磨工程であるCMP(Chemical Mechanical Polishing)においては、ウエハ104の表面構造が金属膜の場合はマーク検出のための検出光がウエハ104の表面で反射されてしまう。したがって、マークのウエハ104表面より凹んだ部分を検出することが困難となり、マーク位置検出に誤差を生じてしまう。ウエハ104の表面を絶縁膜とした場合であっても、その表面が平坦化されているためにマークの段差構造(凹形状)が殆どなくなってしまい、その結果、ウエハ104表面からの反射光の強度が低くなってしまって、位置検出が困難となってしまう。
ウエハ104の表面研磨工程であるCMP(Chemical Mechanical Polishing)においては、ウエハ104の表面構造が金属膜の場合はマーク検出のための検出光がウエハ104の表面で反射されてしまう。したがって、マークのウエハ104表面より凹んだ部分を検出することが困難となり、マーク位置検出に誤差を生じてしまう。ウエハ104の表面を絶縁膜とした場合であっても、その表面が平坦化されているためにマークの段差構造(凹形状)が殆どなくなってしまい、その結果、ウエハ104表面からの反射光の強度が低くなってしまって、位置検出が困難となってしまう。
図20に、CMP等の工程を含むウエハの表面プロセス工程の手順を示す。図20は、ウエハ基板104の表面に形成された酸化シリコン(SiO2)層110にエッチングによりマーク111を形成する工程(S.1)、その上にタングステン膜112を形成する工程(S.2)、ウエハ104表面をCMPにより平坦化する工程(S.3)、その後ウエハ104表面にAl/Si/Cuの合成膜113を形成する工程(S.4)、さらにその上にTiN膜114を形成する工程(S.5)を示している。
ウエハ104表面に光透過性が低くかつ反射率が低い金属膜等が形成された場合は、マーク位置検出信号のコントラストが低下する。コントラストの低下を防止するために、マーク111が平坦化されないようマーク111の線幅を大きくすることも考えられるが、それによってCMP等に起因する非対称性WISが発生してしまう。
本発明は上記のような事情に鑑みて為されたもので、被処理体の表面状態による影響を殆ど受けることなく高精度にマーク位置検出を行ってAGA方式によるアライメントを行うのに適した位置検出マークを選択することができるマーク位置検出装置、マーク検出方法、マーク検出プログラムを提供することを例示的目的とする。また、そのマーク位置検出方法を用いた露光装置や、その露光装置によるデバイスの製造方法、及び、製造されたデバイスを提供することを他の例示的目的とする。
本発明の例示的側面としてのマーク位置検出装置は、被処理体の表面に形成された位置検出用マークに表面から第1の照明光を照射する第1の光源と、第1の照明光の位置検出用マークからの反射光を検出する第1の検出器と、位置検出用マークに被処理体を通して裏面から第2の照明光を照射する第2の光源と、第2の照明光の位置検出用マークからの反射光を検出する第2の検出器と、第1の検出器による検出結果と第2の検出器による検出結果との差分を算出し、その差分に基づいて位置検出マークの中から所定の位置検出マークを選択する演算部と、を有することを特徴とする。
本発明の他の例示的側面としてのマーク検出方法は、被処理体の表面に形成された位置検出用マークに表面から第1の照明光を照射し、その反射光を第1の検出器により検出するステップと、位置検出用マークに被処理体を通して裏面から第2の照明光を照射し、その反射光を第2の検出器により検出するステップと、第1の検出器による検出結果と第2の検出器による検出結果との差分を算出するステップと、その差分に基づいて位置検出マークの中から所定の位置検出マークを選択するステップと、を有することを特徴とする。
本発明の他の例示的側面としてのマーク検出プログラムは、被処理体の表面に形成された位置検出用マークに表面から第1の照明光を照射し、その反射光を第1の検出器により検出するステップと、位置検出用マークに被処理体を通して裏面から第2の照明光を照射し、その反射光を第2の検出器により検出するステップと、第1の検出器による検出結果と第2の検出器による検出結果との差分を算出するステップと、その差分に基づいて位置検出マークの中から所定の位置検出マークを選択するステップと、を実行させることを特徴とする。
本発明の他の例示的側面としての露光装置は、露光原版のパターンを被処理体に露光するための光源と、露光原版を保持する第1の保持部材と、被処理体を保持する第2の保持部材と、上記のマーク検出方法によって選択された所定の位置検出マークの位置を被処理体の表面から検出する検出部と、検出部の検出結果に基づいて、第1の保持部材と第2の保持部材との位置関係を調整する位置調整部と、を備えたことを特徴とする。
本発明の他の例示的側面としての露光装置は、露光原版のパターンを被処理体に露光するための光源と、露光原版を保持する第1の保持部材と、被処理体を保持する第2の保持部材と、上記のマーク検出装置と、マーク検出装置によって選択された所定の位置検出マークの位置を被処理体の表面から検出する検出部と、検出部の検出結果に基づいて、第1の保持部材と第2の保持部材との位置関係を調整する位置調整部と、を備えたことを特徴とする。
本発明の他の例示的側面としてのデバイスの製造方法は、上記の露光装置によって被処理体を投影露光する工程と、投影露光された被処理体に所定のプロセスを行う工程とを有するデバイスの製造方法。
本発明の他の例示的側面としてのデバイスの製造方法は、上記の露光装置によって被処理体を投影露光する工程と、投影露光された被処理体に所定のプロセスを行う工程とを有するデバイスの製造方法。
本発明の他の例示的側面としてのデバイスは、上記の露光装置によって投影露光された被処理体より製造されることを特徴とする。
本発明の更なる目的又はその他の特徴は、以下添付図面を参照して説明される好ましい実施例によって明らかにされるであろう。
本発明によれば、被処理体としてのウエハの表面状態による影響を殆ど受けることなく高精度にマーク位置検出を行ってAGA方式によるアライメントを行うのに適した位置検出マークを選択することができる。ウエハ表面に塗布されたレジストの非対称性により部分的にWISが生じている場合であっても、WISの影響を殆ど受けないアライメントマークを選択することができ、そのアライメントマークを用いてAGA方式によるアライメントを行うことができる。
ウエハの有するWISの程度に応じて、アライメントの高精度化とウエハ製造の高スループット化を適宜選択することもできる。また、マーク検出結果に基づいてWISの状況をレジスト塗布機(コーター)にフィードバックすることにより、より一層レジスト塗布を精密に行うことができ、ひいてはWISを低減することも可能となる。
[実施の形態1]
本発明の実施の形態1に係る位置検出装置を図面を用いて説明する。図1は、本発明の実施の形態1に係るマーク検出装置1を示す装置構成図である。この図において、引用符号2は半導体製造工程で使用される被処理体としてのシリコンウエハ(ウエハ)である。このウエハ2の表面2aにはレジスト3が塗布されている。引用符号4はウエハ2を保持するためのウエハチャックである。このウエハチャック4は、赤外域の光を透過させてウエハ2の裏面2bに導くことができるように構成されている。ウエハチャック4を構成する材料としては、例えば石英等が考えられる。
本発明の実施の形態1に係る位置検出装置を図面を用いて説明する。図1は、本発明の実施の形態1に係るマーク検出装置1を示す装置構成図である。この図において、引用符号2は半導体製造工程で使用される被処理体としてのシリコンウエハ(ウエハ)である。このウエハ2の表面2aにはレジスト3が塗布されている。引用符号4はウエハ2を保持するためのウエハチャックである。このウエハチャック4は、赤外域の光を透過させてウエハ2の裏面2bに導くことができるように構成されている。ウエハチャック4を構成する材料としては、例えば石英等が考えられる。
引用符号5は、ウエハ2を移動してその位置調整を行うことができるウエハステージである。このウエハステージ5は、図に示すXY方向、及びXY平面内での回転方向(θ方向)に移動可能とされている。また、例えばその中心部近傍に孔が形成されることにより赤外域の光を透過させてウエハ2の裏面2bに導くことができるように構成されている。ウエハステージ5は例えばエアーステージ等により構成され、リニアモータのような電磁駆動手段等を用いたウエハ駆動系6によってX,Y,θ方向に駆動されるようになっている。
そのウエハ駆動系6はウエハコントローラ7によって動作制御される。ウエハコントローラ7は図示しないウエハ位置検出部の動作も制御するようになっており、ウエハ位置検出部からの位置検出結果に基づいてウエハステージ5を移動させ、ウエハ2を所望の位置に高精度に位置決めできるように構成されている。
第1の光源(以下、表面側光源という。)10は、第1の照明光(以下、表面光という。)10aをウエハ2の表面2a上に形成された位置検出用マークとしてのアライメントマークMにその表面2aから照射するものである。この実施の形態1においては、アライメントマークMとして例えば図2又は図3に示す矩形マーク30,31が用いられる。
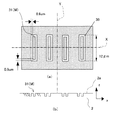
図2(a)に示す矩形マーク30は、位置検出方向としてのX方向の寸法が4μm、X方向に直交するY方向の寸法が12μmとされている。この矩形マーク30は、X方向に沿って例えば20μmのピッチで4つ形成されている。一般にシングルエッジと呼ばれる矩形マーク30は図2(b)にその断面図を示すように、エッチングによりウエハ表面2aに断面凹状として形成されている。図3(a)に示す矩形マーク31は、線幅0.6μmの溝によってX方向の外形寸法4μm、Y方向の外形寸法12μmの矩形として形成されたものである。一般にダブルエッジと呼ばれるこの矩形マーク31もウエハ表面2aにエッチングによって4つ形成され、X方向に沿って20μmのピッチとされている。本実施の形態1においては、アライメントマークMとして図2に示す矩形マーク30を用いた場合について説明する。なお、このアライメントマークMが形成された後に、ウエハ表面2aにレジスト3が塗布される。
図4は、オフアクシス系のアライメント検出光学系105(図16参照)によってアライメントマークM(矩形マーク30)に光を入射した様子を、図2(a)のA−Aで切断して示す断面図である。矩形マーク30は凹形状に形成されているので、ウエハ表面2aに塗布されたレジスト3も、矩形マーク30に対応する部分でなだらかに凹形状となる。
この矩形マーク30のエッジ部分30aでは反射光が散乱するので、反射光の一部は検出光学系105に入射せず、反射光の検出強度が低下する。したがって、検出光学系105の撮像素子106(例えばCCDカメラ)で撮像された像の水平ライン方向でのプロファイルデータ(X方向に沿った検出反射光の強度分布)は、エッジ部分30aに対応する位置2カ所で特に暗くなる(図5参照)。
明視野画像の場合の特徴として、図2に示す矩形マーク30においては、マークの輪郭が暗くなり、図3に示す矩形マーク31においては、マークの周囲溝部分が暗くなる。ウエハ表面2aにレジスト3が塗布されておらず、かつ、矩形マーク30,31のエッジ部分に傾斜等の非対称性がない場合には、検出光学系105で得られた矩形マーク30,31からの反射光による信号は、左右対称の信号波形となる。しかしながら実際には、ウエハ表面2aに塗布されたレジスト3や矩形マークのエッジ部分の非対称性によって、検出光学系105で得られた矩形マーク30,31からの反射光による信号は、左右非対称の信号波形となる。
アライメントマークMの中心を求める信号処理としてモデルパターンを利用したパターンマッチング法やモデル信号の設計値に対して左右信号の対称性の相関度を利用し、相関の評価関数のピークを検出することによりマークの中心を求める自己相関によるパターンマッチング法などの各種画像処理法が使用されている。モデル信号の設計値は理想信号の状況で定義されているので、左右の対称性が良い場合で定義されているために対称性が劣化するほど、設計中心からの計測誤差が発生する。
その計測誤差の値は、ウエハ2面内において、測定位置によって異なる場合がある。例えば、ウエハ表面2aにレジスト3を塗布する工程においてはウエハ2を回転させつつ塗布を行う。ウエハ2を回転させると、その外周部の方が、中心部よりも速度が大きくなるため、ウエハ2の外周部の方が塗布ムラの影響が大きいと考えられる。レジスト3による誤差を測定する方法として、レジスト3の塗布前後でAGA方式によるアライメントを行ってその差を定量化する手段が考えられる。
ウエハ2と酸化シリコン層2cとの段差部分をレジスト3の塗布前後に検出し、それらの検出結果に基いてマーク中心の位置ずれが少ないと判断される位置を選択することにより、WISの影響が少ない検出位置を探すことができる。しかし、検出時のウエハ2のチャッキング状態によってもウエハ2の平面度が変化してしまい、それによる検出誤差も影響して検出誤差が大きくなってしまう。ここで、レジスト3を塗布した状況でレジスト3より下方の段差構造からの反射光情報が得られれば、ウエハ2の平面度の問題を解決することができる。そこで、レジスト3より、下方の構造を直接光学的に検出する手段として、ウエハ2の裏面2bより表面2aのアライメントマークMを検出することが考えられる。図6はシリコンの透過率を示している。図6からわかるように、シリコンウエハ2の透過率は光の波長が1000nmを超えると急速に向上する。
表面光10aは、例えば波長500nm以上700nm以下の可視光であってもよいし、1100nm以上1300nm以下の赤外光であってもよい。そして表面側光源10は、そのような表面光10aを射出するLED光源やLD光源であってもよい。表面側光源10として例えばハロゲン光等の広波長帯域の光源が用いられる場合は、図示しない光学フィルタを用いて所望の波長光のみを選択的に使用する。この表面光10aは、光ファイバ11によって照明光学系12に導かれる。
ウエハ2と酸化シリコン層2cとの段差部分をレジスト3の塗布前後に検出し、それらの検出結果に基いてマーク中心の位置ずれが少ないと判断される位置を選択することにより、WISの影響が少ない検出位置を探すことができる。しかし、検出時のウエハ2のチャッキング状態によってもウエハ2の平面度が変化してしまい、それによる検出誤差も影響して検出誤差が大きくなってしまう。ここで、レジスト3を塗布した状況でレジスト3より下方の段差構造からの反射光情報が得られれば、ウエハ2の平面度の問題を解決することができる。そこで、レジスト3より、下方の構造を直接光学的に検出する手段として、ウエハ2の裏面2bより表面2aのアライメントマークMを検出することが考えられる。図6はシリコンの透過率を示している。図6からわかるように、シリコンウエハ2の透過率は光の波長が1000nmを超えると急速に向上する。
表面光10aは、例えば波長500nm以上700nm以下の可視光であってもよいし、1100nm以上1300nm以下の赤外光であってもよい。そして表面側光源10は、そのような表面光10aを射出するLED光源やLD光源であってもよい。表面側光源10として例えばハロゲン光等の広波長帯域の光源が用いられる場合は、図示しない光学フィルタを用いて所望の波長光のみを選択的に使用する。この表面光10aは、光ファイバ11によって照明光学系12に導かれる。
照明光学系12に導かれた表面光10aは、光学レンズ、ミラーを経由して偏光ビームスプリッタ13を透過し、対物レンズ14によってウエハ表面2aのアライメントマークM周囲へと照射されるようになっている。アライメントマークM周囲で反射された反射光としての表面光10aは再び対物レンズ14を通って偏光ビームスプリッタ13で反射され、検出光学系15へと導かれる。検出光学系15へと導かれた表面光10aは、エレクターレンズ16によって集光され、第1の検出器としての表面側CCD17にて検出され、ビデオ信号に変換される。
第2の光源(以下、裏面側光源という。)20は、第2の照明光(以下、裏面光という。)20aをウエハ2の表面2a上に形成された位置検出用マークとしてのアライメントマークMにその裏面2bから照射するものである。裏面光20aとしては、例えば赤外光が用いられる。裏面側光源20は、その裏面光20aを射出するLED光源やLD光源であってもよい。裏面側光源20として広波長帯域の光源が用いられる場合は、図示しない光学フィルタを用いて所望の波長光のみを選択的に使用する。この裏面光20aは、光ファイバ21によって照明光学系22に導かれる。照明光学系22に導かれた裏面光20aは、光学レンズ、ミラーを経由して偏光ビームスプリッタ23を透過し、対物レンズ24によってウエハ裏面2bからウエハ2を通してウエハ表面2aのアライメントマークM周囲へと照射されるようになっている。
図7は、ウエハ2の表面2aに形成されたアライメントマークMを拡大して示した拡大断面図である。シリコン(Si)を材料とするウエハ2の表面2aに酸化シリコン(SiO2)層2cが形成されており、エッチングによってアライメントマークMが凹形状に形成されている。そのアライメントマークMの凹部分にはタングステン膜2dが形成されており、さらにその上からレジスト3が塗布されている。アライメントマークMが呈する凹形状によってレジスト3も緩やかに凹んだ形状となっている。
赤外光としての裏面光20aはウエハ裏面2bから入射してウエハ2を透過し、ウエハ2と酸化シリコン層2cとの境界面A、ウエハ2とタングステン膜2dとの境界面B、酸化シリコン層2cとレジスト3との境界面C、タングステン膜2dとレジスト3との境界面Dでそれぞれ反射される。このとき、酸化シリコン層2cとタングステン膜2dとでは反射率が異なるため、信号のコントラストは高くなる。ウエハ2の裏面2bが平滑でないと、裏面光20aが裏面2bで散乱してしまい、検出すべき反射光強度が低下する。したがって、このウエハ2は、その裏面2bが鏡面研磨されていることが望ましい。この実施の形態1においては、表面2a、裏面2bともに高精度のアライメント信号検出を行うために、ウエハ2の表面2a、裏面2bはともに鏡面研磨されている。
アライメントマークM周囲で反射された反射光としての裏面光20aは再び対物レンズ24を通って偏光ビームスプリッタ23で反射され、検出光学系25へと導かれる。検出光学系25へと導かれた裏面20aは、エレクターレンズ26によって集光され、第2の検出器としての裏面側CCD27にて検出されて、ビデオ信号に変換される。この裏面側CCD27は、例えば赤外線CCDカメラ等で構成されている。
一般用のCCDカメラの場合、赤外線カットフィルタ(IRフィルタ)により赤外域の光がカットされている場合が多い。赤外域の光は熱源となるので、CCDに入力してしまうと熱雑音が増大し撮像画面のS/N比が悪化するためである。そこで、赤外カットフィルタを取り外して赤外域にも感度を有することとなったCCDカメラが裏面側CCD27として使用される。熱雑音を抑えるためにペルチェ素子等を用いて冷却機能を有したものが市販されている。図8に赤外線CCDカメラの分光感度の例を示す。図6のシリコン(Si)における赤外線の透過率と赤外線CCDカメラの分光感度を参照して、裏面側光源10として必要な光源を選定することができる。
図9は、表面側CCD17、裏面側CCDでそれぞれ検出された検出結果に基づいて所定の演算処理を行ってウエハ2のアライメントを行うための制御系40の概略ブロック図である。表面側CCD17からのビデオ信号17aと裏面側CCD27からのビデオ信号27aは、信号処理部(演算部)41へと入力される。信号処理部41は、ビデオ信号17aとビデオ信号27aとの差分を算出するためのものである。
信号処理部41は、CPU(Central Processing Unit)やDSP(Digital Signal Processor)等により構成されている。信号処理部41では、まずビデオ信号17aに基づいてデジタル信号処理を行い、アライメントマークMの中心位置が検出される。この中心位置は、アライメントマークMをウエハ表面2aから検出した際の中心検出位置となる。同様に、ビデオ信号27aに基づいてデジタル信号処理を行い、アライメントマークMの中心位置が検出される。この中心位置は、アライメントマークMをウエハ裏面2bから検出した際の中心検出位置となる。この2つの中心検出位置の差分が信号処理装置41によって算出される。信号処理の方法としては、自己テンプレート方式のパターンマッチング法、モデルを使用したパターンマッチング法等を使用することができる。
以上のような信号処理は、この信号処理部41内や信号処理部41に接続された図示しないコンピュータにインストールされたマーク検出プログラム等のソフトウェアプログラムによって実現される。そのマーク検出プログラムは、信号処理部41やコンピュータに、表面光10aを表面側CCD17により検出するステップと、裏面光20aを裏面側CCD27により検出するステップと、それらの検出結果の差分を算出するステップと、その差分に基づいてAGA方式によるアライメントに適したアライメントマークMを選択するステップとを実行させるものである。
メインシーケンスコントローラ42は、図1に示すマーク検出装置1全体の動作シーケンスをコントロールするのもので、CPU(Central Processing Unit)や動作シーケンスが書かれたメモリ(ROM、RAM)記憶装置、ウェハコントローラ7との通信インターフェース等から構成されている。
これらの信号処理部41、メインシーケンスコントローラ42、ウエハコントローラ7は、イーサネット(登録商標)等の通信網により接続され、相互に通信可能な構成となっている。
次に、このマーク検出装置1を用いたマーク検出方法及びウエハアライメント方法について説明する。図10は、このマーク検出装置1を用いてウエハ2のアライメントを行う手順を説明するフローチャートである。
マーク検出装置1にウエハ2をローディングした後、まずプリアライメント(粗計測)を行う(S.11)。プリアライメントは、アライメントマークMの位置を後述するファインアライメント(精密計測)に先だっておおよそ把握すべく、ウエハ2の外周に形成されたノッチ43を検出する工程である。このノッチ43は図21に示すように、ウエハ2の外周に三角の切り欠き部分として形成され、オリフラの代わりに位置検出に用いる場合がある。プリアライメントマークを使用した画像処理によるプリアライメントに先立って外周基準で位置検出を行う場合にこのノッチ43が用いられる。
このプリアライメントを行うとウエハステージ5を駆動して、CADデータなどの位置座標情報に基づいて検出光学系の光軸下にアライメントマークMが来るようにウエハ2を移動する。プリアライメントマーク(本実施の形態1においては不図示)でパターンマッチングなどのアライメントを行ってマーク認識を行ってから、アライメントマークMに表面光10a、裏面光20aが照射されるようにウエハステージ5を駆動する。
次にアライメントマークMの位置を精密に検出するファインアライメントを行う(S.12)。検出光学系15,25では、倍率と視野の関係からまず低倍率でプリアライメントを行い、その後倍率を切り替えて高倍率でファインアライメントを行う(この倍率切替手段については図示しない)。ファインアライメントにおいては、アライメントマークMの位置をウエハ2の表面2a側と裏面2b側との双方から検出する。図11は、このファインアライメントの工程を説明するフローチャートである。アライメントマークMに対してウエハ2の表面2a側から表面光10aを照射し、その反射光を表面側CCD17で検出する(S.21)。それとともに、アライメントマークMに対してウエハ2の裏面2b側から裏面光20aを照射し、その反射光を裏面側CCD27で検出する(S.22)。
表面側CCD17による検出結果(ビデオ信号)からアライメントマークMのマーク中心位置を算出し、裏面側CCD27による検出結果(ビデオ信号)からアライメントマークMのマーク中心位置を算出する。そして表面側のマーク中心位置と裏面側のマーク中心位置との差分、すなわちオフセット量を算出する(S.23)。信号処理に関しては、予めアライメントマークMの位置を構成するような同一パターン(ジグ用のテストパターン)等で構成しておく必要がある。
マーク位置合わせ装置(マーク検出装置1)の出荷前の校正では図2,図3に示すアライメントマーク30,31の単純なSi段差の基板を図17に示す配置のように構成して、表面と裏面とからのマーク中心の差分を検出し、検出差をシステムオフセットとして補正しておく。実際の実プロセス工程においては、実プロセス工程で表面にレジストを塗布しない状態で表面と裏面との検出差を予め求めておいた後にレジストを塗布しておき、レジストの非対称性の影響を表面と裏面とからの計測の差で検出する。
ウエハ2表面2aには、複数のショット領域に対応して複数のアライメントマークMが形成されている。したがって、上記ファインアライメント工程は、表面2a上の複数のアライメントマークMのうちから指定された複数のアライメントマークMについて行う。指定されたアライメントマークMについてのすべての検出が完了したか否かを判断し(S.13)、すべてが完了していない場合はメインシーケンスコントローラ42からのシーケンス制御にしたがって次のアライメントマークMを検出する。そのシーケンス制御によって次の指定アライメントマークMを検出するための位置にウエハ2を移動し(S.14)、再びファインアライメント工程を繰り返す。すべての指定アライメントマークMの検出が完了すると、AGA方式によるウエハ2のアライメントに用いるためのアライメントマークM(すなわち、AGAショットに対応するアライメントマークM)を選択する工程を行う(S.15)。
図12は、AGAショットに対応するアライメントマークMを選択する工程を説明するフローチャートである。まずウエハ2全体での誤差を算出する(S.31)。すなわち、ウエハ2全体の倍率・シフト・回転の誤差成分を算出する。そして、指定された複数のアライメントマークMの表面側のマーク中心位置と裏面側のマーク中心位置との差分データから、各アライメントマークMの差分データが予め設定された誤差判定レベルの何%のレベルに入るかを確認する(S.32)。
誤差レベルが設定レベルを超える場合は、警告表示を行う(S.33)。一方、ショット領域に対応するアライメントマークMの誤差レベルが設定レベルを超えていない場合、そのアライメントマークMをAGA方式のウエハアライメントに使用することができると判断し、選択する(S.34)。誤差判定レベルの値に応じて位置検出を行うアライメントマークMの指定数やそのウエハ2上での位置を設定することも可能である。
WISが大きい部分に対応するアライメントマークMの場合は、その表面側と裏面側とでのマーク中心位置の差分データが大きくなる。そのような場合は、重ね合わせ検査装置(重検装置)等によってアライメントマークMの位置検出精度やその相関を確認することにより、さらに位置検出の信頼性を向上させることができる。
このマーク検出装置1によってアライメントマークMの位置検出を行い、その差分データが誤差判定レベルを超えていないものをAGAショットに対応するアライメントマークとして選択することができる。そのアライメントマークを用いて露光装置51(図13参照)によりAGA方式によるアライメントを行い、ウエハ2とレチクルとの正確な位置決めを行って、露光を行うことができる。露光装置51は、露光原版としてのレチクル上の回路パターンをウエハ2表面に露光するための露光光源、レチクルを保持するための第1の保持部材としてのレチクルチャック、ウエハ2を保持するための第2の保持手段としてのウエハチャック、レチクルとウエハ2との位置調整のための位置調整部としてのレチクルステージとウエハステージ、を有している。露光装置51は、マーク検出装置1によって選択されたAGAショットに対応するアライメントマーク(所定のアライメントマーク)Mの位置をウエハ2の表面2aから検出する検出部をさらに有しており、その検出部の検出結果に基づいてレチクルステージとウエハステージとを移動させて両者の位置調整を行い、露光光源によってレチクル上の回路パターンをウエハ2上へと露光する。
なお、本実施の形態1においては、図13に示すようにマーク検出装置1はウエハ表面2aにレジスト3を塗布するためのコーター50と露光装置51との間に配置されている。これらはイーサネット(登録商標)等の通信網により接続され、マーク検出装置1による検出結果をコーター50や露光装置51へと送ることができるように構成されている。したがって、その検出結果をフィードバックすることにより、塗布条件や露光条件等を種々最適に変更することが可能とされている。各装置の制御やデータ通信等は、これらの装置に接続されたホストコンピュータ52によって制御されている。
[実施の形態2]
上記実施の形態1においては、マーク検出装置1を露光装置51と別体として構成し、マーク検出装置1とコーター50と露光装置51とを通信網により接続する構成としたが、このマーク検出装置1が露光装置51内に備えられ、マーク位置検出からウエハ露光までの一連の工程が露光装置51によって行われるものであってもよい。
上記実施の形態1においては、マーク検出装置1を露光装置51と別体として構成し、マーク検出装置1とコーター50と露光装置51とを通信網により接続する構成としたが、このマーク検出装置1が露光装置51内に備えられ、マーク位置検出からウエハ露光までの一連の工程が露光装置51によって行われるものであってもよい。
露光装置51による露光動作に先立って露光装置51内に備えられたマーク検出装置1によるマーク検出動作を行うことにより、マーク位置検出から露光までの連続した一連の工程を露光装置51により行うことができ、高精度な露光を行うことができる。すなわち、図1に示したマーク検出装置1の構成そのものを露光装置51に内蔵させ、露光動作を行う前に図10〜図12に示すソフトウエアでのシーケンス動作を行うように構成することもできる。
また、予め露光装置51内に所定のAGAショット107の数と位置とをパラメータとして有するJOB設定を行っておき、そのJOB設定にしたがってアライメントマークMの位置検出及びウエハ2の位置調整を行ってもよい。その際、JOB設定において設定された所定のAGAショット107以外のAGAショットにおいても同時に計測を行い、その計測値がJOB設定によるAGAショット107の計測値よりも良好な結果である場合には、AGAショットの数と位置とを変更することによりさらに高精度な位置決めを可能とすることができる。
JOB設定とは、計測動作についてのパラメータ等を設定する場合に、マーク検出装置1や露光装置51を動作させるための設定条件に名称が付与されてファイルとして登録されたものである。マーク検出装置1や露光装置51の操作パネル等でこの設定条件のファイルを選択することにより、様々な動作に伴い諸条件が変更されてしまった場合であっても必要なパラメータ条件を装置に読み出してその条件設定に基づいて装置を動作させることが可能となる。
また、マーク検出による検出結果をモニタリングしつつウエハ2の露光を行うことにより、その検出結果にバラツキが少なくウエハ2のWISが小さいと判断できる場合には、AGAショット数を減少させることができる。それによりウエハ2の製造工程のスループットを向上させることができ、ウエハ製造効率を向上させることができる。一方、検出結果にバラツキが多くウエハ2のWISが大きいと判断できる場合には、AGAショットショット数を増加させて、ウエハアライメントにおける平均化効果による高精度化を図ることができる。
次に、図14及び図15を参照して、このマーク検出装置1を備えた露光装置51を利用したデバイスの製造方法の実施例を説明する。図14は、デバイス(ICやLSIなどの半導体チップ、LCD、CCD等)の製造を説明するためのフローチャートである。ここでは、半導体チップの製造を例に説明する。ステップ101(回路設計)ではデバイスの回路設計を行う。ステップ102(レチクル製作)では、設計した回路パターンを形成したレチクルを製作する。ステップ103(ウェハ製造)ではシリコンなどの材料を用いてウェハ(被処理体)を製造する。ステップ104(ウェハプロセス)は前工程と呼ばれ、レチクルとウェハを用いてリソグラフィ技術によってウェハ上に実際の回路を形成する。ステップ105(組み立て)は後工程と呼ばれ、ステップ104によって作成されたウェハを用いて半導体チップ化する工程であり、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の工程を含む。ステップ106(検査)では、ステップ105で作成された半導体デバイスの動作確認テスト、耐久性テストなどの検査を行う。こうした工程を経て半導体デバイスが完成し、これが出荷(ステップ107)される。
図15は、ステップ104のウェハプロセスの詳細なフローチャートである。ステップ111(酸化)ではウェハの表面を酸化させる。ステップ112(CVD)では、ウェハの表面に絶縁膜を形成する。ステップ113(電極形成)では、ウェハ上に電極を蒸着などによって形成する。ステップ114(イオン打ち込み)ではウェハにイオンを打ち込む。ステップ115(レジスト処理)ではウェハに感光剤を塗布する。ステップ116(露光)では、露光装置51によってレチクルの回路パターンをウェハに露光する。ステップ117(現像)では、露光したウェハを現像する。ステップ118(エッチング)では、現像したレジスト像以外の部分を削り取る。ステップ119(レジスト剥離)では、エッチングが済んで不要となったレジストを取り除く。これらのステップを繰り返し行うことによってウェハ上に多重に回路パターンが形成される。この製造方法によれば従来よりも高品位のデバイスを製造することができる。
[実施の形態3]
表面光10aと裏面光20aの波長を同一波長とすることにより、さらに好ましい装置構成とすることができる。このとき、その波長は赤外波長であることが望ましい。表面光10aと裏面光20aの波長を同一波長とすることにより、それぞれのCCD17,27による検出画像の波長差をなくすことができる。したがって、それぞれの検出結果から差分を算出するに際して光源波長差に基づくオフセット補正をする必要がなくなる。一方、表面光10aに可視光を使用することにより、より高精度にウエハ表面2aからのマーク検出を行うことが可能となる。したがって、表面側光源10として複数の波長の光源を内蔵するものを用い、検出精度優先の場合とスループット優先の場合とで、光源10の波長を選択できるようにするとマーク検出装置1の利便性が向上する。
表面光10aと裏面光20aの波長を同一波長とすることにより、さらに好ましい装置構成とすることができる。このとき、その波長は赤外波長であることが望ましい。表面光10aと裏面光20aの波長を同一波長とすることにより、それぞれのCCD17,27による検出画像の波長差をなくすことができる。したがって、それぞれの検出結果から差分を算出するに際して光源波長差に基づくオフセット補正をする必要がなくなる。一方、表面光10aに可視光を使用することにより、より高精度にウエハ表面2aからのマーク検出を行うことが可能となる。したがって、表面側光源10として複数の波長の光源を内蔵するものを用い、検出精度優先の場合とスループット優先の場合とで、光源10の波長を選択できるようにするとマーク検出装置1の利便性が向上する。
M:アライメントマーク(位置検出マーク)
1:マーク検出装置
2:ウエハ(被処理体)
2a:表面
2b:裏面
3:レジスト
4:ウエハチャック
10:表面側光源(第1の光源)
10a:表面光(第1の照明光)
17:表面側CCD(第1の検出器)
20:裏面側光源(第2の光源)
20a:裏面光(第2の照明光)
27:裏面側CCD(第2の検出器)
30,31:矩形マーク(アライメントマーク)
41:信号処理部(演算部)
1:マーク検出装置
2:ウエハ(被処理体)
2a:表面
2b:裏面
3:レジスト
4:ウエハチャック
10:表面側光源(第1の光源)
10a:表面光(第1の照明光)
17:表面側CCD(第1の検出器)
20:裏面側光源(第2の光源)
20a:裏面光(第2の照明光)
27:裏面側CCD(第2の検出器)
30,31:矩形マーク(アライメントマーク)
41:信号処理部(演算部)
Claims (10)
- 被処理体の表面に形成された位置検出用マークに該表面から第1の照明光を照射する第1の光源と、
前記第1の照明光の前記位置検出用マークからの反射光を検出する第1の検出器と、
前記位置検出用マークに前記被処理体を通して裏面から第2の照明光を照射する第2の光源と、
前記第2の照明光の前記位置検出用マークからの反射光を検出する第2の検出器と、
前記第1の検出器による検出結果と前記第2の検出器による検出結果との差分を算出し、その差分に基づいて前記位置検出マークの中から所定の位置検出マークを選択する演算部と、を有するマーク検出装置。 - 前記第1の照明光の波長が、500nm以上700nm以下、又は、1100nm以上1300nm以下のいずれかであることを特徴とする請求項1に記載のマーク検出装置。
- 前記被処理体が、その裏面が鏡面研磨されたシリコンウエハであることを特徴とする請求項1に記載のマーク検出装置。
- 前記第2の照明光が赤外光であることを特徴とする請求項1に記載のマーク検出装置。
- 被処理体の表面に形成された位置検出用マークに該表面から第1の照明光を照射し、その反射光を第1の検出器により検出するステップと、
前記位置検出用マークに前記被処理体を通して裏面から第2の照明光を照射し、その反射光を第2の検出器により検出するステップと、
前記第1の検出器による検出結果と前記第2の検出器による検出結果との差分を算出するステップと、
その差分に基づいて前記位置検出マークの中から所定の位置検出マークを選択するステップと、を有するマーク検出方法。 - コンピュータに、
被処理体の表面に形成された位置検出用マークに該表面から第1の照明光を照射し、その反射光を第1の検出器により検出するステップと、
前記位置検出用マークに前記被処理体を通して裏面から第2の照明光を照射し、その反射光を第2の検出器により検出するステップと、
前記第1の検出器による検出結果と前記第2の検出器による検出結果との差分を算出するステップと、
その差分に基づいて前記位置検出マークの中から所定の位置検出マークを選択するステップと、を実行させるマーク検出プログラム。 - 露光原版のパターンを前記被処理体に露光するための光源と、
該露光原版を保持する第1の保持部材と、
前記被処理体を保持する第2の保持部材と、
請求項6に記載のマーク検出方法によって選択された前記所定の位置検出マークの位置を前記被処理体の表面から検出する検出部と、
該検出部の検出結果に基づいて、前記第1の保持部材と前記第2の保持部材との位置関係を調整する位置調整部と、を備えた露光装置。 - 露光原版のパターンを前記被処理体に露光するための光源と、
該露光原版を保持する第1の保持部材と、
前記被処理体を保持する第2の保持部材と、
請求項1に記載のマーク検出装置と、
該マーク検出装置によって選択された前記所定の位置検出マークの位置を前記被処理体の表面から検出する検出部と、
該検出部の検出結果に基づいて、前記第1の保持部材と前記第2の保持部材との位置関係を調整する位置調整部と、を備えた露光装置。 - 請求項7又は請求項8に記載の露光装置によって前記被処理体を投影露光する工程と、投影露光された前記被処理体に所定のプロセスを行う工程とを有するデバイスの製造方法。
- 請求項7又は請求項8に記載の露光装置によって投影露光された前記被処理体より製造されるデバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003289427A JP2005057222A (ja) | 2003-08-07 | 2003-08-07 | マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003289427A JP2005057222A (ja) | 2003-08-07 | 2003-08-07 | マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005057222A true JP2005057222A (ja) | 2005-03-03 |
| JP2005057222A5 JP2005057222A5 (ja) | 2006-09-14 |
Family
ID=34367751
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003289427A Withdrawn JP2005057222A (ja) | 2003-08-07 | 2003-08-07 | マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005057222A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009147317A (ja) * | 2007-11-20 | 2009-07-02 | Asml Netherlands Bv | リソグラフィ装置および方法 |
| JP2013251342A (ja) * | 2012-05-30 | 2013-12-12 | Canon Inc | 計測方法、露光方法および装置 |
| JP2015023145A (ja) * | 2013-07-18 | 2015-02-02 | キヤノン株式会社 | 検出装置、露光装置及び物品の製造方法 |
| JP2015084437A (ja) * | 2014-12-08 | 2015-04-30 | キヤノン株式会社 | 計測方法、露光方法および装置 |
| US9069265B2 (en) | 2011-03-30 | 2015-06-30 | Mapper Lithography Ip B.V. | Interferometer module |
| US9383662B2 (en) | 2011-05-13 | 2016-07-05 | Mapper Lithography Ip B.V. | Lithography system for processing at least a part of a target |
| JP2016129212A (ja) * | 2015-01-09 | 2016-07-14 | キヤノン株式会社 | 計測装置、リソグラフィ装置及び物品の製造方法 |
| US9395636B2 (en) | 2011-04-22 | 2016-07-19 | Mapper Lithography Ip B.V. | Lithography system for processing a target, such as a wafer, and a method for operating a lithography system for processing a target, such as a wafer |
| US9395635B2 (en) | 2011-04-22 | 2016-07-19 | Mapper Lithography Ip B.V. | Position determination in a lithography system using a substrate having a partially reflective position mark |
| US9551563B2 (en) | 2012-09-27 | 2017-01-24 | Mapper Lithography Ip B.V. | Multi-axis differential interferometer |
| CN113035734A (zh) * | 2021-02-25 | 2021-06-25 | 北京华卓精科科技股份有限公司 | 一种硅片偏移量确定方法及硅片交接精度检测方法 |
-
2003
- 2003-08-07 JP JP2003289427A patent/JP2005057222A/ja not_active Withdrawn
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009147317A (ja) * | 2007-11-20 | 2009-07-02 | Asml Netherlands Bv | リソグラフィ装置および方法 |
| US9690215B2 (en) | 2011-03-30 | 2017-06-27 | Mapper Lithography Ip B.V. | Interferometer module |
| US9678443B2 (en) | 2011-03-30 | 2017-06-13 | Mapper Lithography Ip B.V. | Lithography system with differential interferometer module |
| US9261800B2 (en) | 2011-03-30 | 2016-02-16 | Mapper Lithography Ip B.V. | Alignment of an interferometer module for use in an exposure tool |
| US9069265B2 (en) | 2011-03-30 | 2015-06-30 | Mapper Lithography Ip B.V. | Interferometer module |
| US9395635B2 (en) | 2011-04-22 | 2016-07-19 | Mapper Lithography Ip B.V. | Position determination in a lithography system using a substrate having a partially reflective position mark |
| US9395636B2 (en) | 2011-04-22 | 2016-07-19 | Mapper Lithography Ip B.V. | Lithography system for processing a target, such as a wafer, and a method for operating a lithography system for processing a target, such as a wafer |
| US9383662B2 (en) | 2011-05-13 | 2016-07-05 | Mapper Lithography Ip B.V. | Lithography system for processing at least a part of a target |
| JP2013251342A (ja) * | 2012-05-30 | 2013-12-12 | Canon Inc | 計測方法、露光方法および装置 |
| US9551563B2 (en) | 2012-09-27 | 2017-01-24 | Mapper Lithography Ip B.V. | Multi-axis differential interferometer |
| JP2015023145A (ja) * | 2013-07-18 | 2015-02-02 | キヤノン株式会社 | 検出装置、露光装置及び物品の製造方法 |
| JP2015084437A (ja) * | 2014-12-08 | 2015-04-30 | キヤノン株式会社 | 計測方法、露光方法および装置 |
| JP2016129212A (ja) * | 2015-01-09 | 2016-07-14 | キヤノン株式会社 | 計測装置、リソグラフィ装置及び物品の製造方法 |
| US10185235B2 (en) | 2015-01-09 | 2019-01-22 | Canon Kabushiki Kaisha | Measurement apparatus, lithography apparatus, and method of manufacturing article |
| CN113035734A (zh) * | 2021-02-25 | 2021-06-25 | 北京华卓精科科技股份有限公司 | 一种硅片偏移量确定方法及硅片交接精度检测方法 |
| CN113035734B (zh) * | 2021-02-25 | 2024-03-08 | 北京华卓精科科技股份有限公司 | 一种硅片偏移量确定方法及硅片交接精度检测方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7158233B2 (en) | Alignment mark, alignment apparatus and method, exposure apparatus, and device manufacturing method | |
| JP2003092248A (ja) | 位置検出装置、位置決め装置及びそれらの方法並びに露光装置及びデバイスの製造方法 | |
| JP2009192271A (ja) | 位置検出方法、露光装置、及びデバイス製造方法 | |
| JP2019507375A (ja) | パターン形成プロセスを制御する方法、リソグラフィ装置、メトロロジ装置リソグラフィックセル、および関連するコンピュータプログラム | |
| JP4235459B2 (ja) | アライメント方法及び装置並びに露光装置 | |
| JP2022058401A (ja) | 基板の特性を測定する方法、検査装置、リソグラフィシステム、及びデバイス製造方法 | |
| WO2022040228A1 (en) | Method of pattern alignment for field stitching | |
| JP2005057222A (ja) | マーク検出装置、マーク検出方法、マーク検出プログラム、露光装置、デバイスの製造方法、及び、デバイス | |
| TW201721307A (zh) | 控制微影設備之方法、微影設備及器件製造方法 | |
| JP4323636B2 (ja) | 位置計測方法及び位置計測装置 | |
| TW200815934A (en) | Calculation method and apparatus of exposure condition, and exposure apparatus | |
| JP2005011980A (ja) | 位置検出方法 | |
| US6914666B2 (en) | Method and system for optimizing parameter value in exposure apparatus and exposure apparatus and method | |
| JP6608130B2 (ja) | 計測装置、リソグラフィ装置、及び物品の製造方法 | |
| JP2005011976A (ja) | 位置検出方法 | |
| JP2016100590A (ja) | フォーカス制御方法、パターン転写装置、および物品の製造方法 | |
| US8212990B2 (en) | Exposure apparatus, information processing apparatus, and method of manufacturing device | |
| JPH1041219A (ja) | 投影露光装置及びそれを用いたデバイスの製造方法 | |
| JP3313543B2 (ja) | 露光装置用位置合せ装置及び位置合わせ方法 | |
| JP4455035B2 (ja) | 位置特定方法 | |
| JP7336343B2 (ja) | 露光装置、露光方法、および物品の製造方法 | |
| JP3919689B2 (ja) | 露光方法、素子の製造方法および露光装置 | |
| JP4314082B2 (ja) | アライメント方法 | |
| JP4383945B2 (ja) | アライメント方法、露光方法、及び露光装置 | |
| JP2663939B2 (ja) | 位置合わせ方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060727 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060727 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20060908 |