JP2005016979A - 車載カメラ校正治具及び車載カメラ校正方法 - Google Patents
車載カメラ校正治具及び車載カメラ校正方法 Download PDFInfo
- Publication number
- JP2005016979A JP2005016979A JP2003178192A JP2003178192A JP2005016979A JP 2005016979 A JP2005016979 A JP 2005016979A JP 2003178192 A JP2003178192 A JP 2003178192A JP 2003178192 A JP2003178192 A JP 2003178192A JP 2005016979 A JP2005016979 A JP 2005016979A
- Authority
- JP
- Japan
- Prior art keywords
- calibration
- vehicle
- scale
- camera
- imaging object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
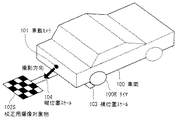
【解決手段】車両100に搭載されたカメラ101の路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物102Sと、前記校正用撮像対象物102Sと車両100との車幅に沿う方向の相対的な位置合わせをするためのスケール103と、を具備することを特徴とする車載カメラ校正治具。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、車両に搭載されたカメラの設置位置と設置角度を校正するための車載カメラ校正治具及び車載カメラ校正方法に関する。
【0002】
【従来の技術】
近年、車載カメラ分野において、道路面に対する車載カメラの設置位置・設置角度を求める車載カメラ校正技術の必要性が高まっている。例えば、駐車時の車両後方のカメラ画像にバンパーからの距離を示す線を画像に重畳するには、事前にカメラ校正を行う必要がある。なお、白線検知機能、障害物検知機能を実現する上でカメラ校正結果を利用する方法は、これまでに多くの提案が出されている。
【0003】
ここで、従来の車載カメラ校正治具について図面を用いて説明する。図7は、従来の車載カメラ校正治具とその使用状態を示す斜視図である。また、図8は、同治具の平面図である。
【0004】
図7及び図8において、車両100の最後部に車載カメラ101が設けられている。車両100の後方の路面上には校正の基準となる位置を示す複数の基準位置パターンを有する校正用撮像対象物102が配置される。この校正用撮像対象物102の基準位置パターンはカメラ校正用の基準位置を示すものであり、通常視覚的に特徴点を抽出しやすいパターンが使用される。図では隣接する正方形の色が異なる市松模様パターンとしている。
【0005】
車載カメラ101の校正方法としては、最初に車両100と校正用撮像対象物102の位置を正確に合わせる。例えば、車両100と校正用撮像対象物102の中心を合わせる。座標は実際の路面の三次元座標(以下「世界座標」という)をとる。例えば、図7において車両100の最後尾と中心軸の交点を原点として、路面をX,Y軸、高さ方向をZ軸としている。車両100と校正用撮像対象物102との位置決めを行った後、車載カメラ101で校正用撮像対象物102を撮像する。撮像された画像はモニタ(図示略)上に表示され、その画像上の正方形の頂点が基準位置としてマウス等の入力手段により入力される。この頂点の座標はxy平面上の二次元座標(以下「イメージ座標」という)で表現される。なお、パターン認識により自動的に頂点のイメージ座標を求めることもある。
【0006】
その後、正方形の頂点のイメージ座標と実際の世界座標との対応づけが行われる。このようなイメージ座標と世界座標の対応付けが複数の頂点について行われ、これらの座標を入力としてカメラ校正用のパラメータ(以下単に「カメラ校正パラメータ」という)が算出される。
【0007】
この処理の詳細は、例えば、非特許文献1に記載されている。
【0008】
【非特許文献1】
”A Versatile Camera Calibration Technique for High−Accuracy 3D Machine Vision Metrology Using Off−the−Shelf TV Cameras and Lenses”, Roger Y. Tsai, IEEE Journal of Robotics and automation Vol. RA−3. No.4 August 1987, pp323−344
【0009】
【発明が解決しようとする課題】
しかしながら、従来の車載カメラ校正治具においては、車両100と校正用撮像対象物102の中心を合わせる際にメジャーなどの測定具が必要となるが、この測定具を用いても簡単には車両100と校正用撮像対象物102の車幅方向に沿う相対位置を正確に決めることが困難であるという問題がある。
【0010】
また、校正精度を高めようとすると、より大きな校正用撮像対象物102を必要とするが、校正用撮像対象物102を大型化すると、扱い難くなるという問題が発生する。
【0011】
本発明は、かかる点に鑑みてなされたものであり、車両と校正用撮像対象物の車幅方向に沿う相対位置を容易且つ正確に決めることができ、また校正用撮像対象物を大型化しなくとも高い位置決め精度を出すことができ校正精度を高めることができる車載カメラ校正治具及び車載カメラ校正方法を提供することを目的とする。
【0012】
【課題を解決するための手段】
前記課題を解決するために、請求項1に係る発明の車載カメラ校正治具は、車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物と、前記校正用撮像対象物と車両との車幅に沿う方向の相対的な位置合わせをするためのスケールと、を具備することを特徴とする。
【0013】
この構成によれば、スケールによって校正用撮像対象物と車両との車幅に沿う方向の相対的な位置合わせを行えるので、車両の前後方向の中心軸上に校正用撮像対象物の中心を合わせることができる。すなわち、車両と校正用撮像対象物の相対位置を容易且つ正確に決めることができる。また、高精度に位置決めができ校正精度を高めることができるので、校正用撮像対象物を大型にする必要がなく、扱い難くなることがない。
【0014】
また、請求項2に係る発明の車載カメラ校正治具は、車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物と、前記校正用撮像対象物と車両との車幅方向に沿う相対的な位置合わせをするための第1スケールと、前記カメラの設置位置と前記校正用撮像対象物との間の距離を計測するための第2スケールと、を具備することを特徴とする。
【0015】
この構成によれば、第1スケールによって車両の前後方向の中心軸上に校正用撮像対象物の中心を合わせることができる。また、第2スケールによってカメラの設置位置と校正用撮像対象物との間の距離を計測できるので、校正用撮像対象物がカメラ直下に位置しなくてもカメラの設置位置と校正用撮像対象物との間の距離をカメラ校正用のパラメータを求める際の補正値として用いることができる。更に、第2スケールによってカメラの設置位置と校正用撮像対象物との間の距離を計測できることから、第1スケールをカメラ直下に配置する必要がなく、車幅に対して容易に平行をとることができる左右のタイヤ間に配置することができる。また、高精度に位置決めができ校正精度を高めることができるので、校正用撮像対象物を大型にする必要がなく、扱い難くなることがない。
【0016】
また、請求項3に係る発明の車載カメラ校正治具は、車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターン部分と車両との車幅に沿う方向の相対的な位置合わせをするための第1スケールと、前記カメラの設置位置と前記基準位置パターン部分との間の距離を計測するためのスケール部分と前記基準位置パターン部分とからなる第2スケールと、を具備することを特徴とする。
【0017】
この構成によれば、第2スケールに、カメラの設置位置と基準位置パターン部分との間の距離を計測するスケール部分と当該基準位置パターン部分とを持たせたので、独立して校正用撮像対象物を設ける必要がない分、コストの削減やコンパクト化が図れる。
【0018】
また、請求項4に係る発明の車載カメラ校正方法は、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物を撮像することで得られる画像を元に車載カメラの路面に対する設置位置と設置角度とを校正するパラメータを求める車載カメラ校正方法であって、中心を基準として左右対称に目盛が設けられたスケールを用いて車両の前後方向の中心軸を求め、求めた車両の前後方向の中心軸上に前記校正用撮像対象物の中心が一致するように前記校正用撮像対象物を配置し、この校正用撮像対象物を撮像することで得られる画像を元に前記車載カメラ校正用のパラメータを求めて前記車載カメラの校正を行うことを特徴とする。
【0019】
この方法によれば、正確且つ短時間で車載カメラの校正が可能となる。
【0020】
また、請求項5に係る発明の車載カメラ校正方法は、請求項4に係る発明の車載カメラ校正方法において、前記基準位置パターンを前記車載カメラの設置位置直下から外れた位置に配置する場合には前記車載カメラの設置位置からの距離を測定し、この距離測定結果を前記車載カメラ校正用のパラメータを求める際の補正値として用いることを特徴とする。
【0021】
この方法によれば、校正用撮像対象物が車載カメラ直下に位置しなくても車載カメラの設置位置と校正用撮像対象物との間の距離を車載カメラ校正用のパラメータを求める際の補正値として用いることができる。
【0022】
【発明の実施の形態】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0023】
(実施の形態1)
図1は、本発明の実施の形態1に係る車載カメラ校正治具とその使用状態を示す斜視図である。また、図2は、本実施の形態に係る車載カメラ校正治具の平面図である。なお、図7と共通する部分には同一の符号を付けている。
【0024】
図1において、本実施の形態に係る車載カメラ校正治具は、従来より小型の校正用撮像対象物102Sと、車両100と校正用撮像対象物102Sとの配置決定を行うための横位置スケール103とを備えている。横位置スケール103には、図2に示すように、その中心を基準として左右対称に目盛(0〜100)が描画されている。車載カメラ101は、車両100の最後部のバンパー内に設けられている。
【0025】
次に、本実施の形態に係る車載カメラ校正治具による車載カメラ校正方法ついて説明する。まず、横位置スケール103を車両100の最後部直下で且つ車幅方向に沿って配置する。すなわち、バンパーの直下で、且つバンパーの長さ方向に沿って配置する。この際、図2に示すように、バンパーの両端が横位置スケール103の左右等しい目盛(図2では「100」)上に来るように配置する。このように横位置スケール103を配置することで、車両100の前後方向の中心軸が横位置スケール103の目盛「0」上に位置することになる。
【0026】
横位置スケール103を配置した後、校正用撮像対象物102Sを横位置スケール103の長さ方向と直角になる方向で、且つ校正用撮像対象物102Sの中心が横位置スケール103の目盛「0」上に来るように配置する。このように校正用撮像対象物102Sを配置することで、校正用撮像対象物102Sの中心が車両100の長さ方向の中心軸上に位置することになる。
【0027】
横位置スケール103と校正用撮像対象物102Sを配置した後、車載カメラ101で校正用撮像対象物102Sを撮像する。この際、校正用撮像対象物102Sと車両100の相対位置が正確に決まっているので、校正用撮像対象物102Sの特徴点の世界座標を正確に決定することができる。そして、校正用撮像対象物102Sの特徴点の世界座標を決定した後、当該世界座標に対応する画像上のイメージ座標を求める。そして、求めた特徴点の座標に基づいて従来方法と同様の方法でカメラ外部パラメータ(カメラ校正パラメータ)を求める。
【0028】
このように、本実施の形態に係る車載カメラ校正治具によれば、従来より小型の校正用撮像対象物102Sに加えて、中心を基準として左右対称に目盛を描画した横位置スケール103を具備し、この横位置スケール103をその目盛の中心から左右対称の位置にバンパーの両端が位置するように配置し、その後、校正用撮像対象物102Sをその中心が横位置スケール103の目盛「0」に合うように配置することで、車両100と校正用撮像対象物102Sの相対位置が正確に決まる。そして、高い校正精度が得られるので、校正用撮像対象物102Sを大型化する必要もない。これによって、校正用撮像対象物102Sが扱い難くなったりすることはない。
【0029】
なお、本実施の形態では、横位置スケール103と校正用撮像対象物102Sとを別体としたが、一体化しても構わない。また、本実施の形態では、車両後方を撮像する車載カメラ101の校正を行う場合であったが、車両前方や側方を撮像する車載カメラがある場合、その車載カメラに対しても同様に校正を行うことができる。この場合、車両側方を撮像する車載カメラについては、車両の長さに応じた目盛を持つ横位置スケールを用意すればよい。
【0030】
(実施の形態2)
図3は、本発明の実施の形態2に係る車載カメラ校正治具とその使用状態を示す斜視図である。また、図4は、本実施の形態に係る車載カメラ校正治具の平面図である。なお、図3及び図4において前述した図1及び図2と共通する部分には同一の符号を付けている。
【0031】
本実施の形態に係る車載カメラ校正治具は、横位置スケール103の他に、車両100の最後部と校正用撮像対象物102Sとの間の距離を測定するための縦位置スケール104を備えている。ここで、前述した実施の形態1に係る車載カメラ校正治具にあっては、車両100のバンパーの長さ方向に沿って横位置スケール103をバンパーと平行に配置させる必要があるが、この平行をとるまでに多少の時間がかかることになる。本実施の形態では、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうようにするので、極短時間で横位置スケール103をバンパーと平行に配置することができる。
【0032】
しかしながら、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうことで、横位置スケール103が車両100の下に入ってしまうことになるので、校正用撮像対象物102Sもその大きさによってはその全部又は一部分が車両100の下に入ってしまうことになる。このため、そのままでは車載カメラ101で撮像することができない。そこで、横位置スケール103の長さ方向に対して直角に縦位置スケール104を配置して、車両100の後部のバンパーから校正用撮像対象物102Sまでの距離(図中「D」で示す)を測定することで、車載カメラ101の校正を可能としている。算出した距離Dは、世界座標を求める際の補正値とする。
【0033】
次に、本実施の形態に係る車載カメラ校正治具による車載カメラ校正方法について説明する。まず、横位置スケール103を車両100の左右後輪のタイヤ100R,100Lにあてがうようにして配置する。この際、図4に示すように、車両後部のバンパーの両端が横位置スケール103の左右等しい目盛上に来るように配置する。このように横位置スケール103を配置することで、車両100の前後方向の中心軸が横位置スケール103の目盛「0」上に位置することになる。
【0034】
横位置スケール103を配置した後、縦位置スケール104を横位置スケール103の長さ方向と直角になる方向で、且つ縦位置スケール104の長さ方向の中心軸が横位置スケール103の目盛「0」上に来るように配置する。このように縦位置スケール104を配置することで、縦位置スケール104の長さ方向の中心軸が車両100の長さ方向の中心軸上に位置することになる。そして、縦位置スケール104を配置した後、校正用撮像対象物102Sをその中心が縦位置スケール104の長さ方向の中心軸上に来るように配置する。校正用撮像対象物102Sを配置した後、縦位置スケール104で車両100の後部のバンパーと校正用撮像対象物102Sとの間の距離Dを測定する。
【0035】
車両100の後部のバンパーと校正用撮像対象物102Sとの間の距離Dを測定した後、車載カメラ101で校正用撮像対象物102Sを撮像する。車両100と校正用撮像対象物102Sの相対位置関係が決定されているので、校正用撮像対象物102Sの特徴点の世界座標のY軸の値に距離Dを加算して補正した世界座標とする。そして、この特徴点の座標に基づいて、従来方法と同様の方法でカメラ外部パラメータを求める。
【0036】
このように、本実施の形態に係る車載カメラ校正治具によれば、従来より小型の校正用撮像対象物102Sに加えて、中心を基準として左右対称に目盛を描画した横位置スケール103と、長さ方向に沿って目盛を描画した縦位置スケール104とを具備し、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうようにして配置した後、縦位置スケール104をその長さ方向の中心軸が横位置スケール103の目盛「0」に合うように配置し、この状態で校正用撮像対象物102Sをその中心が縦位置スケール104の長さ方向の中心軸上に来るように配置することで、車両100と校正用撮像対象物102Sの相対位置が正確に決まる。そして、高い校正精度が得られるので、校正用撮像対象物102Sを大型化する必要もない。これによって、校正用撮像対象物102Sが扱い難くなったりすることはない。更に、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうだけで、横位置スケール103を車両100の幅方向に対して平行に配置することができる。
【0037】
なお、本実施の形態では、横位置スケール103と縦位置スケール104とを別体としたが、一体化しても構わない。横位置スケール103と縦位置スケール104とを一体化することで多少扱い難くはなるが、縦位置スケール104をその長さ方向の中心軸が横位置スケール103の目盛「0」に一致するように配置する手間を省くことができる。
【0038】
また、本実施の形態では、横位置スケール103を左右のタイヤ100R,100Lに接触させることで、車両100の後部のバンパーと平行をとるようにしているが、横位置スケール103の厚みを薄くすると、左右のタイヤ100R,100Lの磨耗状況の違いによっては、タイヤ100R,100Lそれぞれと路面との間の隙間に違いが生じて横位置スケール103をバンパーと平行に配置させることができないことが起こる虞が考えられる。この問題は、工場出荷前の車両については全てのタイヤが新品であるので問題はないが、納車後からある程度時間が経過した時点での点検時では問題となることがあり得る。そこで、このような問題が起こらないように横位置スケール103はある程度の厚みを持たせるようにするとよい。
【0039】
(実施の形態3)
図5は、本発明の実施の形態3に係る車載カメラ校正治具とその使用状態を示す斜視図である。また、図6は、本実施の形態に係る車載カメラ校正治具の平面図である。なお、図5及び図6において前述した図3及び図4と共通する部分には同一の符号を付けている。
【0040】
本実施の形態に係る車載カメラ校正治具は、横位置スケール103の他に、2つの校正用撮像対象物兼用縦位置スケール105A,105Bと、校正用撮像対象物兼用縦位置スケール105A,105B間の配置を保つ縦位置スケール支え106とを備えている。校正用撮像対象物兼用縦位置スケール105A,105Bのそれぞれは、長さ方向に沿って目盛が描画されたスケール部分と、黒と白の2色塗り(ベースが白であれば黒のみとなるので、この場合は1色塗り)された校正用基準位置パターン部分とから成る。校正用撮像対象物兼用縦位置スケール105A,105Bは、図6に示すように、横位置スケール103の長さ方向に対して直角で、且つ横位置スケール103の中心を基準として左右対称の位置に離間配置される。校正用撮像対象物兼用縦位置スケール105Aのスケール部分は、車両の右側最後部と校正用撮像対象物兼用縦位置スケール105Aの校正用基準位置パターン部分との間の距離を計測するものであり、校正用撮像対象物兼用縦位置スケール105Bのスケール部分は、車両の左側最後部と校正用撮像対象物兼用縦位置スケール105Bの校正用基準位置パターン部分との間の距離を計測するものである。実際は双方とも同じ距離となるので、計測は一方のみでもよい。
【0041】
次に、本実施の形態に係る車載カメラ校正治具による車載カメラ校正方法について説明する。まず、実施の形態2と同様に、車両100に横位置スケール103をタイヤ100R,100Lの両輪に沿う方向で配置する。そして、横位置スケール103を配置した後、校正用撮像対象物兼用縦位置スケール105A,105Bを横位置スケール103の長さ方向に対して直角に、且つ横位置スケール103の中心を基準として左右対称に配置する。次に、縦位置スケール支え106を2つの校正用撮像対象物兼用縦位置スケール105A,105Bに対して直角方向に配置して、校正用撮像対象物兼用縦位置スケール105A,105B間を平行に保つ。縦位置スケール支え106を配置した後、校正用撮像対象物兼用縦位置スケール105Aのスケール部で、車両の右側最後部と校正用撮像対象物兼用縦位置スケール105Aの校正用基準位置パターン部分との間の距離を計測する(校正用撮像対象物兼用縦位置スケール105Bのスケール部で、車両の左側最後部と校正用撮像対象物兼用縦位置スケール105Bの校正用基準位置パターン部分との間の距離を計測しても構わない)。この場合の距離をDとする。
【0042】
車両100の最後部と校正用撮像対象物兼用縦位置スケール105A,105Bの校正用基準位置パターン部分との間の距離Dを測定した後、車載カメラ101で校正用撮像対象物兼用縦位置スケール105A,105Bを撮像する。車両100と校正用撮像対象物兼用縦位置スケール105A,105Bの相対位置関係は決定されているので、校正用撮像対象物兼用縦位置スケール105A,105Bの特徴点の世界座標のY軸の値に距離Dを減算して世界座標とする。この特徴点の座標に基づいて、従来方法と同様の方法でカメラ外部パラメータを求める。例えば、校正用撮像対象物兼用縦位置スケール105A,105Bの特徴点は表面上を色わけした長方形の頂点とする。
【0043】
このように、本実施の形態に係る車載カメラ校正治具によれば、中心を基準として左右対称に目盛を描画した横位置スケール103と、それぞれが長さ方向に沿って目盛を描画したスケール部分と黒と白の2色塗りされた校正用基準位置パターン部分とからなる校正用撮像対象物兼用縦位置スケール105A,105Bと、校正用撮像対象物兼用縦位置スケール105A,105Bが平行になるように保持する縦位置スケール支え106とを具備し、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうようにして配置した後、校正用撮像対象物兼用縦位置スケール105A,105Bを横位置スケール103の長さ方向に対して直角で、且つ横位置スケール103の中心を基準として左右対称に配置することで、車両100と校正用撮像対象物兼用縦位置スケール105A,105Bの相対位置を正確に決めることができる。そして、高い校正精度が得られることから校正用撮像対象物兼用縦位置スケール105A,105Bを大型化する必要もなく、これらが扱い難くなったりすることはない。更に、横位置スケール103を左右後輪のタイヤ100R,100Lにあてがうだけで横位置スケール103を車両100の幅方向に対して平行に配置することができる。
【0044】
なお、本実施の形態では、校正用撮像対象物兼用縦位置スケール105A,105Bと縦位置スケール支え106とを別体としたが、一体化しても構わない。一体化することで多少扱い難くはなるが、校正用撮像対象物兼用縦位置スケール105A,105Bの平行がとり易い。
【0045】
【発明の効果】
以上説明したように、本発明によれば、スケールによって校正用撮像対象物と車両との車幅に沿う方向の相対的な位置合わせを行えるので、車両の前後方向の中心軸上に校正用撮像対象物の中心を合わせることができる。また、高精度に位置決めができ校正精度を高めることができるので、校正用撮像対象物を大型にする必要がなく、扱い難くなることがない。
【0046】
また、本発明によれば、第2スケールによってカメラの設置位置と校正用撮像対象物との間の距離を計測できるので、校正用撮像対象物がカメラ直下に位置しなくてもカメラの設置位置と校正用撮像対象物との間の距離をカメラ校正用のパラメータを求める際の補正値として用いることができる。更に、第2スケールによってカメラの設置位置と校正用撮像対象物との間の距離を計測できることから、第1スケールをカメラ直下に配置する必要がなく、車幅に対して容易に平行をとることができる左右のタイヤ間に配置することができる。
【0047】
また、本発明によれば、第2スケールに、カメラの設置位置と基準位置パターン部分との間の距離を計測するスケール部分と当該基準位置パターン部分とを持たせたので、独立して校正用撮像対象物を設ける必要がない分、コストの削減やコンパクト化が図れる。
【図面の簡単な説明】
【図1】本発明の実施の形態1に係る車載カメラ校正治具とその使用状態を示す斜視図である。
【図2】本発明の実施の形態1に係る車載カメラ校正冶具による車載カメラ校正方法を説明するための平面図である。
【図3】本発明の実施の形態2に係る車載カメラ校正冶具とその使用状態を示す斜視図である。
【図4】本発明の実施の形態2に係る車載カメラ校正冶具による車載カメラ校正方法を説明するための平面図である。
【図5】本発明の実施の形態3に係る車載カメラ校正冶具とその使用状態を示す斜視図である。
【図6】本発明の実施の形態3に係る車載カメラ校正冶具による車載カメラ校正方法を説明するための平面図である。
【図7】従来の車載カメラ校正冶具とその使用状態を示す斜視図である。
【図8】従来の車載カメラ校正冶具による車載カメラ校正方法を説明するための平面図である。
【符号の説明】
100 車両
100R,100L タイヤ
101 車載カメラ
102S 校正用撮像対象物
103 横位置スケール
104 縦位置スケール
105A,105B 校正用撮像対象物兼用縦位置スケール
106 縦位置スケール支え
Claims (5)
- 車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物と、前記校正用撮像対象物と車両との車幅に沿う方向の相対的な位置合わせをするためのスケールと、を具備することを特徴とする車載カメラ校正治具。
- 車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物と、前記校正用撮像対象物と車両との車幅に沿う方向の相対的な位置合わせをするための第1スケールと、前記カメラの設置位置と前記校正用撮像対象物との間の距離を計測するための第2スケールと、を具備することを特徴とする車載カメラ校正治具。
- 車両に搭載されたカメラの路面に対する設置位置と設置角度とを校正するための車載カメラ校正治具であって、校正の基準となる位置を示す基準位置パターン部分と車両との車幅に沿う方向の相対的な位置合わせをするための第1スケールと、前記カメラの設置位置と前記基準位置パターン部分との間の距離を計測するためのスケール部分と前記基準位置パターン部分とからなる第2スケールと、を具備することを特徴とする車載カメラ校正治具。
- 校正の基準となる位置を示す基準位置パターンを有する校正用撮像対象物を撮像することで得られる画像を元に車載カメラの路面に対する設置位置と設置角度とを校正するパラメータを求める車載カメラ校正方法であって、中心を基準として左右対称に目盛が設けられたスケールを用いて車両の前後方向の中心軸を求め、求めた車両の前後方向の中心軸上に前記校正用撮像対象物の中心が一致するように前記校正用撮像対象物を配置し、この校正用撮像対象物を撮像することで得られる画像を元に前記車載カメラ校正用のパラメータを求めて前記車載カメラの校正を行うことを特徴とする車載カメラ校正方法。
- 前記基準位置パターンを前記車載カメラの設置位置直下から外れた位置に配置する場合には前記車載カメラの設置位置からの距離を測定し、この距離測定結果を前記車載カメラ校正用のパラメータを求める際の補正値として用いることを特徴とする請求項4に記載の車載カメラ校正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003178192A JP4454257B2 (ja) | 2003-06-23 | 2003-06-23 | 車載カメラ校正治具及び車載カメラ校正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003178192A JP4454257B2 (ja) | 2003-06-23 | 2003-06-23 | 車載カメラ校正治具及び車載カメラ校正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005016979A true JP2005016979A (ja) | 2005-01-20 |
| JP4454257B2 JP4454257B2 (ja) | 2010-04-21 |
Family
ID=34179894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003178192A Expired - Fee Related JP4454257B2 (ja) | 2003-06-23 | 2003-06-23 | 車載カメラ校正治具及び車載カメラ校正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4454257B2 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009118414A (ja) * | 2007-11-09 | 2009-05-28 | Alpine Electronics Inc | マッピングテーブル生成兼検証用物品 |
| WO2010016379A1 (ja) * | 2008-08-05 | 2010-02-11 | アイシン精機株式会社 | ターゲット位置特定装置 |
| KR100948886B1 (ko) | 2009-06-25 | 2010-03-24 | 주식회사 이미지넥스트 | 차량에 설치된 카메라의 공차 보정 장치 및 방법 |
| US8280665B2 (en) | 2008-09-30 | 2012-10-02 | Aisin Seiki Kabushiki Kaisha | Calibration device for on-vehicle camera |
| JP2013002820A (ja) * | 2011-06-11 | 2013-01-07 | Suzuki Motor Corp | カメラキャリブレーション装置 |
| WO2013125206A1 (ja) * | 2012-02-24 | 2013-08-29 | 京セラ株式会社 | カメラ装置、カメラシステム、およびカメラ較正方法 |
| US20130261892A1 (en) * | 2012-03-28 | 2013-10-03 | Honda Motor Co., Ltd. | Method for determining installation position of portable information terminal on vehicle |
| JP5602288B1 (ja) * | 2013-07-25 | 2014-10-08 | 阪神高速技術株式会社 | 車両位置認識システム |
| JP2017009462A (ja) * | 2015-06-23 | 2017-01-12 | 富士通株式会社 | 校正治具及び校正用マーカ配置方法 |
| GB2541197A (en) * | 2015-08-11 | 2017-02-15 | Nokia Technologies Oy | An apparatus and method for calibrating cameras |
| JP2018036189A (ja) * | 2016-09-01 | 2018-03-08 | 三菱電機株式会社 | キャリブレーション装置およびキャリブレーション方法 |
| JP2019007953A (ja) * | 2017-06-21 | 2019-01-17 | 株式会社デンソーテン | マーカー設置システムおよび方法 |
| JP2019109775A (ja) * | 2017-12-19 | 2019-07-04 | 株式会社ダイヘン | 移動体、及び治具 |
| US20210033467A1 (en) * | 2018-04-17 | 2021-02-04 | Autel Inteligent Technology Corp., Ltd. | Calibration apparatus, system and method for in-vehicle camera |
| JPWO2022102571A1 (ja) * | 2020-11-10 | 2022-05-19 |
-
2003
- 2003-06-23 JP JP2003178192A patent/JP4454257B2/ja not_active Expired - Fee Related
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009118414A (ja) * | 2007-11-09 | 2009-05-28 | Alpine Electronics Inc | マッピングテーブル生成兼検証用物品 |
| WO2010016379A1 (ja) * | 2008-08-05 | 2010-02-11 | アイシン精機株式会社 | ターゲット位置特定装置 |
| US8077199B2 (en) | 2008-08-05 | 2011-12-13 | Aisin Seiki Kabushiki Kaisha | Target position identifying apparatus |
| JPWO2010016379A1 (ja) * | 2008-08-05 | 2012-01-19 | アイシン精機株式会社 | ターゲット位置特定装置 |
| KR101205428B1 (ko) | 2008-08-05 | 2012-11-27 | 아이신세이끼가부시끼가이샤 | 타겟 위치 특정 장치 |
| US8280665B2 (en) | 2008-09-30 | 2012-10-02 | Aisin Seiki Kabushiki Kaisha | Calibration device for on-vehicle camera |
| KR100948886B1 (ko) | 2009-06-25 | 2010-03-24 | 주식회사 이미지넥스트 | 차량에 설치된 카메라의 공차 보정 장치 및 방법 |
| JP2013002820A (ja) * | 2011-06-11 | 2013-01-07 | Suzuki Motor Corp | カメラキャリブレーション装置 |
| WO2013125206A1 (ja) * | 2012-02-24 | 2013-08-29 | 京セラ株式会社 | カメラ装置、カメラシステム、およびカメラ較正方法 |
| JP2013173452A (ja) * | 2012-02-24 | 2013-09-05 | Kyocera Corp | 較正処理装置、カメラ較正装置、カメラシステム、およびカメラ較正方法 |
| US20130261892A1 (en) * | 2012-03-28 | 2013-10-03 | Honda Motor Co., Ltd. | Method for determining installation position of portable information terminal on vehicle |
| US8897961B2 (en) * | 2012-03-28 | 2014-11-25 | Honda Motor Co., Ltd. | Method for determining installation position of portable information terminal on vehicle |
| JP5602288B1 (ja) * | 2013-07-25 | 2014-10-08 | 阪神高速技術株式会社 | 車両位置認識システム |
| JP2017009462A (ja) * | 2015-06-23 | 2017-01-12 | 富士通株式会社 | 校正治具及び校正用マーカ配置方法 |
| GB2541197A (en) * | 2015-08-11 | 2017-02-15 | Nokia Technologies Oy | An apparatus and method for calibrating cameras |
| JP2018036189A (ja) * | 2016-09-01 | 2018-03-08 | 三菱電機株式会社 | キャリブレーション装置およびキャリブレーション方法 |
| JP2019007953A (ja) * | 2017-06-21 | 2019-01-17 | 株式会社デンソーテン | マーカー設置システムおよび方法 |
| JP2019109775A (ja) * | 2017-12-19 | 2019-07-04 | 株式会社ダイヘン | 移動体、及び治具 |
| JP7153442B2 (ja) | 2017-12-19 | 2022-10-14 | 株式会社ダイヘン | 移動体 |
| US20210033467A1 (en) * | 2018-04-17 | 2021-02-04 | Autel Inteligent Technology Corp., Ltd. | Calibration apparatus, system and method for in-vehicle camera |
| US12061118B2 (en) * | 2018-04-17 | 2024-08-13 | Autel Intelligent Technology Corp., Ltd. | Calibration apparatus, system and method for in-vehicle camera |
| JPWO2022102571A1 (ja) * | 2020-11-10 | 2022-05-19 | ||
| JP7435822B2 (ja) | 2020-11-10 | 2024-02-21 | 株式会社村田製作所 | タイヤ観察装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4454257B2 (ja) | 2010-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4454257B2 (ja) | 車載カメラ校正治具及び車載カメラ校正方法 | |
| JP5811327B2 (ja) | カメラキャリブレーション装置 | |
| CN102257354B (zh) | 用于行驶机构测量的方法及用于测量机动车行驶机构几何参数的装置 | |
| CN110008893B (zh) | 一种基于车载图像传感器的车辆行驶跑偏自动检测方法 | |
| US6915228B2 (en) | Method and device for calibrating an image sensor system in a motor vehicle | |
| JP6008605B2 (ja) | 被牽引車両ホイールベース検出装置及び被牽引車両ホイールベース検出装置を備えた車両制御装置 | |
| US7352388B2 (en) | Camera calibrating apparatus | |
| CN100491903C (zh) | 一种结构光视觉传感器结构参数标定方法 | |
| US6526665B2 (en) | Glint-resistant position determination system | |
| EP3032818B1 (en) | Image processing device | |
| US20110085181A1 (en) | Measuring head for a chassis measuring system, chassis measuring system and method for determining the position parameters of measuring heads of a chassis measuring system | |
| US20090040312A1 (en) | Calibration apparatus and method thereof | |
| US20020029127A1 (en) | Method and apparatus for measuring 3-D information | |
| CN113888626B (zh) | 惯性测量单元与线扫描3d相机在线联合标定装置及方法 | |
| WO2018171496A1 (zh) | 汽车摄像测量组件与汽车三维四轮定位方法及系统 | |
| WO2017135081A1 (ja) | 車載カメラ用校正システム | |
| EP1295086A1 (en) | Glint-resistant position determination system | |
| CN109074653A (zh) | 用于检测机动车辆的道路旁边的物体的方法、计算设备、驾驶员辅助系统以及机动车辆 | |
| KR20120036317A (ko) | 교정목표 검출장치와, 교정목표를 검출하는 교정목표 검출방법과, 교정목표 검출장치를 위한 프로그램 | |
| CN101160505A (zh) | 用于确定机动车的车轮和/或轴几何特征的方法 | |
| JP2019078612A (ja) | タイヤ変形量算出装置、過積載検出システム及びタイヤ変形量算出方法 | |
| WO2012135014A2 (en) | Image sensor calibration system and method | |
| CN116930187A (zh) | 车身漆面缺陷视像检测方法与视像检测系统 | |
| US10365094B2 (en) | Optical device and method for wheel alignment | |
| JP7380443B2 (ja) | 部分画像生成装置及び部分画像生成用コンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060325 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060529 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20071114 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071121 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20071128 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071205 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100105 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100202 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130212 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4454257 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |