JP2004282970A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2004282970A JP2004282970A JP2003074824A JP2003074824A JP2004282970A JP 2004282970 A JP2004282970 A JP 2004282970A JP 2003074824 A JP2003074824 A JP 2003074824A JP 2003074824 A JP2003074824 A JP 2003074824A JP 2004282970 A JP2004282970 A JP 2004282970A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- rotor
- count value
- value
- energized phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




























Abstract
【解決手段】モータのフィードバック制御中にエンコーダのパルス信号出力タイミングに同期してエンコーダカウント値に基づいて通電相を設定すると共に、時間同期処理によって所定周期でエンコーダカウント値に基づいて通電相を設定する。フィードバック制御中にエンコーダカウント値の最大値・最小値を逐次記憶しておき、現在のエンコーダカウント値と最大値・最小値とを比較することで逆転の有無を判定し、逆転を検出した時には、通電相をホールドして逆転を止める。尚、最大値・最小値に対してそれぞれ所定カウント値分の不感帯を設定し、この不感帯内では逆転と判定しないようにしても良い。
【選択図】 図29
Description
【発明の属する技術分野】
本発明は、エンコーダのパルス信号のカウント値に基づいてロータの回転位置を検出してモータの通電相を順次切り換えることでロータを目標位置まで回転駆動するモータ制御装置に関するものである。
【0002】
【従来の技術】
近年、構造が簡単で安価なモータとして需要が増加しているスイッチトリラクタンスモータ等のブラシレス型のモータは、ロータの回転に同期してパルス信号を出力するエンコーダを搭載し、このエンコーダのパルス信号をカウントして、そのエンコーダカウント値に基づいてロータの回転位置を検出して通電相を順次切り換えることでロータを回転駆動するようにしたものがある。このようなエンコーダ付きのモータは、起動後のエンコーダカウント値に基づいてロータの回転位置を検出することができるため、フィードバック制御系(F/B制御系)によりロータを目標位置まで回転させる位置切換制御(位置決め制御)を行う各種の位置切換装置の駆動源として用いられている(例えば特許文献1参照)。
【0003】
このようなエンコーダ付きのモータでF/B制御を行う場合、エンコーダのパルス信号出力タイミングに同期してエンコーダカウント値に基づいて通電相を切り換えてロータを目標位置に向かって回転駆動し、エンコーダカウント値が目標位置に応じて設定された目標カウント値に到達した時点で、ロータが目標位置に到達したと判断してF/B制御を終了し、ロータを目標位置で停止させるようにしている。
【0004】
【特許文献1】
特開2001−271917号公報(第4頁〜第8頁等)
【0005】
【発明が解決しようとする課題】
上記従来のモータのF/B制御では、エンコーダのパルス信号出力タイミングに同期して通電相を切り換えるため、F/B制御の途中で、何等かの原因でロータの回転が一旦停止して、エンコーダからパルス信号が出力されなくなると、通電相の切り換えを行うことができなくなってしまい、ロータを目標位置まで回転駆動できないという不具合が発生する。
【0006】
このような不具合を解決するため、本発明者らは、特願2002−276521号の明細書に記載されているように、F/B制御による通電相の切り換えとは別に、時間同期処理によって通電相を切り換える機能を持たせ、ロータの回転が停止した状態でも時間同期処理によって通電相の切り換えを行うことができるようにする発明を出願している。
【0007】
F/B制御の途中で、何等かの原因でロータの回転が逆転することがあるため、逆転を検出したときには、直ちに通電相をホールド(固定)して逆転を止める必要がある(逆転を止めないと逆転し続けてしまうためである)。一般に、逆転の検出方法は、エンコーダカウント値の前回値と今回値とを比較して、エンコーダカウント値の増減方向が反転したか否かで、逆転の有無を判定するようにしている(図26参照)。
【0008】
しかし、図27に示すように、F/Bと時間同期処理の両方で通電相を切り換えると、前回のF/B処理によるエンコーダカウント値の前回値が時間同期処理によって更新されてしまうため、実際にロータが逆転していても、エンコーダカウント値の前回値と今回値が同じになって停止と判定されてしまい、その結果、時間同期処理によって通電相を切り換えて逆転し続けてしまうという不具合を発生する。
【0009】
本発明はこれらの事情を考慮してなされたものであり、その目的は、モータのF/B制御の途中で、何等かの原因でロータの回転が一旦停止した場合でも、可能な限りロータを目標位置まで回転駆動できると共に、逆転が発生したときには逆転を止めることができるモータ制御装置を提供することにある。
【0010】
【課題を解決するための手段】
上記目的を達成するために、本発明の請求項1のモータ制御装置は、モータのF/B制御中にエンコーダのパルス信号出力タイミングに同期してエンコーダカウント値に基づいて通電相を設定する第1の通電相設定手段と、ロータが目標位置に回転駆動されるまで時間同期処理によって所定周期でエンコーダカウント値に基づいて通電相を設定する第2の通電相設定手段とを備え、これら第1及び第2の各通電相設定手段によって通電相が設定される毎にその通電相の巻線に通電するように構成すると共に、ロータを目標位置へ回転駆動する途中で該ロータの回転方向が逆転したときにその逆転を検出する逆転検出手段を設け、この逆転検出手段で逆転を検出したときに通電相ホールド手段によって通電相を前回の通電相に固定するようにしたものである。
【0011】
この構成では、モータF/B制御の途中で、何等かの原因でロータの回転が一旦停止してエンコーダからパルス信号が出力されなくなった場合でも、時間同期処理によって所定周期でその時点のエンコーダカウント値に基づいて通電相を設定できるため、ロータの回転が停止した状態でも通電相の切り換えを行うことができて、可能な限りロータを目標位置まで回転駆動することができる。しかも、ロータを目標位置へ回転駆動する途中で該ロータの回転方向が逆転すれば、その逆転を検出して通電相を固定して逆転を止めることができる。
【0012】
この場合、逆転検出手段の具体例としては、請求項2のように、ロータをエンコーダカウント値がカウントアップする方向に回転駆動しているときには該エンコーダカウント値の最大値を逐次記憶しておき、現在のエンコーダカウント値と前記最大値とを比較することで逆転の有無を判定し、ロータをエンコーダカウント値がカウントダウンする方向に回転駆動しているときには該エンコーダカウント値の最小値を逐次記憶しておき、現在のエンコーダカウント値と前記最小値とを比較することで逆転の有無を判定するようにすると良い。このようにすれば、前回のF/B処理によるエンコーダカウント値の前回値が時間同期処理によって更新されるという事情があっても、エンコーダカウント値の最大値・最小値を用いて逆転検出を行うことができる。
【0013】
ところで、図28に示すように、F/B制御中(ロータの回転中)に目標位置が切り換えられると、F/B制御の途中でロータの回転方向を強制的に逆転させなければならないことがある。このような場合、ロータの回転中に目標位置が切り換えられても、ロータの慣性があるためにロータの回転方向を即座に逆転させることは不可能であり、実際には、目標位置が切り換えられてからロータの回転方向が逆転するまでに若干の時間を要するため、その間は、切り換え後の目標位置から見て、ロータが“逆転”している状態となる。このため、逆転検出を正確に行い過ぎると(換言すれば後述する不感帯がないと)、F/B制御の途中で目標位置が切り換えられた場合に、目標位置の切り換え直後のロータの慣性による過渡的な挙動が“逆転”と判定されて、モータが強制的に停止されてしまう不具合が発生する。
【0014】
この対策として、請求項3のように、現在のエンコーダカウント値を前記最大値又は前記最小値と比較して逆転の有無を判定する際に、前記最大値及び前記最小値に対してそれぞれ所定カウント値分の不感帯を設定し、この不感帯内では逆転と判定しないようにすると良い。このようにすれば、F/B制御の途中で目標位置が切り換えられた場合でも、目標位置の切り換え直後のロータの慣性による過渡的な挙動を不感帯によって“逆転”と判定せずに済み、F/B制御の途中で目標位置が切り換えられた場合でも、ロータを目標位置まで回転駆動することができる。
【0015】
また、請求項4のように、通電相ホールド手段で通電相が固定されている状態を検出したときにオープンループ駆動手段によりオープンループ制御に切り換え、エンコーダカウント値の情報をフィードバックせずに通電相を順次切り換えると共に、その通電相の切換回数をカウントしてそのカウント値に基づいてロータを目標位置まで回転駆動するようにすると良い。このようにすれば、逆転検出により通電相が固定されている状態から自動的にF/B制御可能な状態に復帰することができる。
【0016】
この場合、請求項5のように、前記最大値又は前記最小値は、F/B制御開始時にそのときのエンコーダカウント値を初期値としてセットするようにすると良い。このようにすれば、過去のF/B制御で検出されたエンコーダカウント値の最大値又は最小値の影響を受けずに、今回のF/B制御中のエンコーダカウント値の最大値又は最小値を正確に検出することができる。
【0017】
また、請求項6のように、モータとしてスイッチトリラクタンスモータを使用するようにしても良い。スイッチトリラクタンスモータは、永久磁石が不要で構造が簡単であるため、安価であり、温度環境等に対する耐久性・信頼性も高いという利点がある。
【0018】
以上説明した請求項1〜6に係る発明は、スイッチトリラクタンスモータ等のブラシレス型のモータを駆動源とする各種の位置切換装置に適用でき、例えば、請求項7のように、車両の自動変速機のレンジを切り換えるレンジ切換機構を駆動するモータの制御装置に適用しても良い。これにより、信頼性の高いモータ駆動式のレンジ切換装置を構成することができる。
【0019】
【発明の実施の形態】
以下、本発明を車両のレンジ切換装置に適用した一実施形態を図面に基づいて説明する。
【0020】
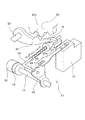
まず、図1に基づいてレンジ切換機構11の構成を説明する。レンジ切換機構11の駆動源となるモータ12は、例えばスイッチトリラクタンスモータにより構成され、減速機構26(図4参照)を内蔵し、その出力軸13の回転位置を検出する出力軸センサ14が設けられている。この出力軸13には、ディテントレバー15が固定されている。
【0021】
また、ディテントレバー15にはL字形のパーキングロッド18が固定され、このパーキングロッド18の先端部に設けられた円錐体19がロックレバー21に当接している。このロックレバー21は、円錐体19の位置に応じて軸22を中心にして上下動してパーキングギヤ20をロック/ロック解除するようになっている。パーキングギヤ20は、自動変速機27の出力軸に設けられ、このパーキングギヤ20がロックレバー21によってロックされると、車両の駆動輪が回り止めされた状態(パーキング状態)に保持される。
【0022】
一方、ディテントレバー15をパーキングレンジ(以下「Pレンジ」と表記する)と他のレンジ(以下「NotPレンジ」と表記する)に保持するためのディテントバネ23が支持ベース17に固定され、このディテントバネ23の先端に設けられた係合部23aがディテントレバー15のPレンジ保持凹部24に嵌まり込んだときに、ディテントレバー15がPレンジの位置に保持され、該ディテントバネ23の係合部23aがディテントレバー15のNotPレンジ保持凹部25に嵌まり込んだときに、ディテントレバー15がNotPレンジの位置に保持されるようになっている。
【0023】
Pレンジでは、パーキングロッド18がロックレバー21に接近する方向に移動して、円錐体19の太い部分がロックレバー21を押し上げてロックレバー21の凸部21aがパーキングギヤ20に嵌まり込んでパーキングギヤ20をロックした状態となり、それによって、自動変速機27の出力軸(駆動輪)がロックされた状態(パーキング状態)に保持される。
【0024】
一方、NotPレンジでは、パーキングロッド18がロックレバー21から離れる方向に移動して、円錐体19の太い部分がロックレバー21から抜け出てロックレバー21が下降し、それによって、ロックレバー21の凸部21aがパーキングギヤ20から外れてパーキングギヤ20のロックが解除され、自動変速機27の出力軸が回転可能な状態(走行可能な状態)に保持される。
【0025】
尚、前述した出力軸センサ14は、モータ12の減速機構26の出力軸13の回転角度に応じた電圧を出力する回転センサ(例えばポテンショメータ)によって構成され、その出力電圧によって現在のレンジがPレンジとNotPレンジのいずれであるかを確認できるようになっている。
【0026】
次に、図2に基づいてモータ12の構成を説明する。本実施形態では、モータ12として、スイッチトリラクタンスモータ(以下「SRモータ」と表記する)が用いられている。このSRモータ12は、ステータ31とロータ32が共に突極構造を持つモータで、永久磁石が不要で構造が簡単であるという利点がある。円筒状のステータ31の内周部には、例えば12個の突極31aが等間隔に形成され、これに対して、ロータ32の外周部には、例えば8個の突極32aが等間隔に形成され、ロータ32の回転に伴い、ロータ32の各突極32aがステータ31の各突極31aと微小ギャップを介して順番に対向するようになっている。ステータ31の12個の突極31aには、U相、V相、W相の合計6個の巻線33と、U’相、V’相、W’相の合計6個の巻線34が順番に巻回されている。尚、ステータ31とロータ32の突極31a,32aの数は適宜変更しても良いことは言うまでもない。
【0027】
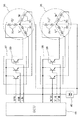
本実施形態の巻線33,34の巻回順序は、ステータ31の12個の突極31aに対して、例えば、V相→W相→U相→V相→W相→U相→V’相→W’相→U’相→V’相→W’相→U’相の順序で巻回されている。図3に示すように、U相、V相、W相の合計6個の巻線33と、U’相、V’相、W’相の合計6個の巻線34は、2系統のモータ励磁部35,36を構成するように結線されている。一方のモータ励磁部35は、U相、V相、W相の合計6個の巻線33をY結線して構成され(同じ相の2個の巻線33はそれぞれ直列に接続されている)、他方のモータ励磁部36は、U’相、V’相、W’相の合計6個の巻線34をY結線して構成されている(同じ相の2個の巻線34はそれぞれ直列に接続されている)。2つのモータ励磁部35,36は、U相とU’相が同時に通電され、V相とV’相が同時に通電され、W相とW’相が同時に通電される。
【0028】
これら2つのモータ励磁部35は、車両に搭載されたバッテリ40を電源として、それぞれ別個のモータドライバ37,38によって駆動される。このように、モータ励磁部35,36とモータドライバ37,38をそれぞれ2系統ずつ設けることで、一方の系統が故障しても、他方の系統でSRモータ12を回転させることができるようになっている。図3に示すモータドライバ37,38の回路構成例では、各相毎にトランジスタ等のスイッチング素子39を1個ずつ設けたユニポーラ駆動方式の回路構成としているが、各相毎にスイッチング素子を2個ずつ設けたバイポーラ駆動方式の回路構成を採用しても良い。尚、本発明は、モータ励磁部とモータドライバをそれぞれ1系統ずつ設けた構成としても良いことは言うまでもない。
【0029】
各モータドライバ37,38の各スイッチング素子39のオン/オフは、ECU41(通電制御手段)によって制御される。図4に示すように、このECU41と各モータドライバ37,38は、レンジ切換制御装置42に搭載され、このレンジ切換制御装置42には、Pレンジへの切換操作を行うPレンジスイッチ43と、NotPレンジへの切換操作を行うNotPレンジスイッチ44の操作信号が入力される。Pレンジスイッチ43又はNotPレンジスイッチ44の操作により選択されたレンジは、インストルメントパネル(図示せず)に設けられたレンジ表示部45に表示される。
【0030】
SRモータ12には、ロータ32の回転位置を検出するためのエンコーダ46が設けられている。このエンコーダ46は、例えば磁気式のロータリエンコーダにより構成されており、その具体的な構成は、図5及び図6に示すように、N極とS極が円周方向に交互に等ピッチで着磁された円環状のロータリマグネット47がロータ32の側面に同軸状に固定され、このロータリマグネット47に対向する位置に、3個のホールIC等の磁気検出素子48,49,50が配置された構成となっている。本実施形態では、ロータリマグネット47のN極とS極の着磁ピッチが7.5°に設定されている。このロータリマグネット47の着磁ピッチ(7.5°)は、SRモータ12の励磁1回当たりのロータ32の回転角度と同じに設定されている。後述するように、1−2相励磁方式でSRモータ12の通電相の切り換えを6回行うと、全ての通電相の切り換えが一巡してロータ32とロータリマグネット47が一体的に7.5°×6=45°回転する。このロータリマグネット47の45°の回転角度範囲に存在するN極とS極の数は、合計6極となっている。
【0031】
更に、ロータ32の基準回転位置に相当する位置のN極(N’)とその両側のS極(S’)がそれ以外の磁極よりも径方向の幅が広くなるように形成されている。尚、本実施形態では、SRモータ12の通電相の切り換えが一巡する間にロータ32とロータリマグネット47が一体的に45°回転することを考慮して、ロータ32の基準回転位置に相当する幅広な着磁部分(N’)が45°ピッチで形成されており、従って、ロータリマグネット47全体として、基準回転位置に相当する幅広な着磁部分(N’)が合計8個形成されている。尚、基準回転位置に相当する幅広な着磁部分(N’)は、ロータリマグネット47全体として、1個のみ形成した構成としても良い。
【0032】
このロータリマグネット47に対して3個の磁気検出素子48,49,50が次のような位置関係で配置されている。A相信号を出力する磁気検出素子48とB相信号を出力する磁気検出素子49は、ロータリマグネット47の幅狭な着磁部分(N,S)と幅広な着磁部分(N’,S’)の両方に対向し得る位置の同一円周上に配置されている。一方、Z相信号を出力する磁気検出素子50は、ロータリマグネット47の幅狭な着磁部分(N,S)よりも径方向外側又は内側の位置で、且つ、幅広な着磁部分(N’,S’)のみに対向し得る位置に配置されている。A相信号とB相信号を出力する2個の磁気検出素子48,49の間隔は、図7に示すように、A相信号とB相信号の位相差が、電気角で90°(機械角で3.75°)となるように設定されている。ここで、“電気角”はA・B相信号の発生周期を1周期(360°)とした場合の角度で、“機械角”は機械的な角度(ロータ32の1回転を360°とした場合の角度)であり、A相信号の立ち下がり(立ち上がり)からB相信号の立ち下がり(立ち上がり)までにロータ32が回転する角度がA相信号とB相信号の位相差の機械角に相当する。また、Z相信号を出力する磁気検出素子50は、Z相信号とB相信号(又はA相信号)との位相差が0となるように配置されている。
【0033】
各磁気検出素子48,49,50の出力は、N極(N’極)と対向したときにハイレベル“1”となり、S極(S’極)と対向したときにローレベル“0”となる。尚、Z相信号用の磁気検出素子50の出力は、ロータ32の基準回転位置に相当する幅広なN’極に対向する毎にハイレベル“1”となり、それ以外の位置では、ローレベル“0”となる。
【0034】
本実施形態では、ECU41が後述する図8のエンコーダカウンタルーチンによってA相信号とB相信号の立ち上がり/立ち下がりの両方のエッジをカウントして、そのエンコーダカウント値に応じてSRモータ12の通電相を切り換えることでロータ32を回転駆動する。この際、A相信号とB相信号の発生順序によってロータ32の回転方向を判定し、正回転(Pレンジ→NotPレンジの回転方向)ではエンコーダカウント値をカウントアップし、逆回転(NotPレンジ→Pレンジの回転方向)ではエンコーダカウント値をカウントダウンする。これにより、ロータ32が正回転/逆回転のいずれの方向に回転しても、エンコーダカウント値とロータ32の回転位置との対応関係が維持されるため、正回転/逆回転のいずれの回転方向でも、エンコーダカウント値によってロータ32の回転位置(回転角度)を検出して、その回転位置に対応した相の巻線33,34に通電してロータ32を回転駆動する。
【0035】
図7は、ロータ32を逆回転方向(NotPレンジ→Pレンジの回転方向)に回転させたときのエンコーダ46の出力波形と通電相の切換パターンを示している。逆回転方向(NotPレンジ→Pレンジの回転方向)と正回転方向(Pレンジ→NotPレンジの回転方向)のいずれの場合も、ロータ32が7.5°回転する毎に1相通電と2相通電とを交互に切り換えるようになっており、ロータ32が45°回転する間に、例えば、U相通電→UW相通電→W相通電→VW相通電→V相通電→UV相通電の順序で通電相の切り換えを一巡するようになっている。そして、この通電相の切り換え毎に、ロータ32が7.5°ずつ回転して、A相、B相信号用の磁気検出素子48,49に対向するロータリマグネット47の磁極がN極→S極(N’極→S’極)又はS極→N極(S’極→N’極)に変化してA相信号とB相信号のレベルが交互に反転し、それによって、ロータ32が7.5°回転する毎に、エンコーダカウント値が2ずつカウントアップ(又はカウントダウン)する。また、通電相の切り換えが一巡してロータ32が45°回転する毎に、Z相用の磁気検出素子50がロータ32の基準回転位置に相当する幅広なN’極に対向して、Z相信号がハイレベル“1”となる。尚、本明細書では、A相、B相、Z相信号がハイレベル“1”となることを、A相、B相、Z相信号が出力されると言う場合がある。
【0036】
このようなエンコーダ46付きのSRモータ12でレンジ切換制御を行う場合は、指令シフトレンジ(目標位置)がPレンジからNotPレンジ又はその反対方向に切り換えられる毎に、ロータ32を回転駆動して、エンコーダカウント値に基づいてSRモータ12の通電相を順次切り換えることでロータ32を目標位置に向かって回転駆動するフィードバック制御(以下「F/B制御」と表記する)を実行し、エンコーダカウント値が目標位置に応じて設定された目標カウント値に到達した時点で、ロータ32が目標位置に到達したと判断してF/B制御を終了し、ロータ32を目標位置で停止させるようにしている。
【0037】
このSRモータ12のF/B制御では、エンコーダ46のA相・B相信号出力タイミングに同期して通電相を切り換えるため、F/B制御の途中で、何等かの原因でロータ32の回転が一旦停止して、エンコーダ46からA相・B相信号が出力されなくなると、F/B制御では通電相の切り換えを行うことができなくなってしまい、ロータ32を目標位置まで回転駆動できない。
【0038】
そこで、本実施形態では、レンジ切換制御装置42のECU41は、SRモータ12のF/B制御開始からロータ32が目標位置に回転駆動されるまで、所定周期(例えば1ms周期)でエンコーダカウント値に基づいて通電相を設定する時間同期通電相設定処理をF/B制御と並行して実行する。
【0039】
この構成では、F/B制御の途中で、何等かの原因でロータ32の回転が一旦停止してエンコーダ46からA相・B相信号が出力されなくなった場合でも、時間同期通電相設定処理によってその時点のエンコーダカウント値に基づいて通電相が設定されるため、ロータ32の回転が停止した状態でも、時間同期通電相設定処理によって通電相の切り換えを行うことができて、可能な限りロータ32を目標位置まで回転駆動することができ、SRモータ12の駆動制御(レンジ切換制御)の信頼性を向上することができる。
【0040】
ところで、F/B制御の途中で、何等かの原因でロータ32の回転が逆転することがあるため、逆転を検出したときには、直ちに通電相をホールド(固定)して逆転を止める必要がある(逆転を止めないと逆転し続けてしまうためである)。一般に、逆転の検出方法は、エンコーダカウント値の前回値と今回値とを比較して、エンコーダカウント値の増減方向が反転したか否かで、逆転の有無を判定するようにしている(図26参照)。
【0041】
しかし、図27に示すように、F/Bと時間同期通電相設定処理の両方で通電相を切り換えると、前回のF/B処理によるエンコーダカウント値の前回値が時間同期通電相設定処理によって更新されてしまうため、実際にロータ32が逆転していても、エンコーダカウント値の前回値と今回値が同じになって停止と判定されてしまい、その結果、時間同期通電相設定処理によって通電相を切り換えて逆転し続けてしまうという不具合を発生する。
【0042】
そこで、本実施形態では、レンジ切換制御装置42のECU41は、ロータ32を目標位置へ回転駆動する途中で該ロータ32の回転方向が逆転したことを検出したときに通電相を前回の通電相にホールド(固定)して、逆転を止めるようにしている。
【0043】
この場合、逆転検出方法は、ロータ32をエンコーダカウント値がカウントアップする方向に回転駆動しているときには該エンコーダカウント値の最大値をECU41のメモリ(図示せず)に逐次記憶しておき、現在のエンコーダカウント値と前記最大値とを比較することで逆転の有無を判定し、ロータ32をエンコーダカウント値がカウントダウンする方向に回転駆動しているときには該エンコーダカウント値の最小値をメモリに逐次記憶しておき、現在のエンコーダカウント値と前記最小値とを比較することで逆転の有無を判定するようにしている。このようにすれば、前回のF/B処理によるエンコーダカウント値の前回値が時間同期通電相設定処理によって更新されるという事情があっても、エンコーダカウント値の最大値・最小値を用いて逆転検出を行うことができる。
【0044】
ところで、図28に示すように、F/B制御中(ロータ32の回転中)に目標位置が切り換えられると、F/B制御の途中でロータ32の回転方向を強制的に逆転させなければならないことがある。このような場合、ロータ32の回転中に目標位置が切り換えられても、ロータ32の慣性があるためにロータ32の回転方向を即座に逆転させることは不可能であり、実際には、目標位置が切り換えられてからロータ32の回転方向が逆転するまでに若干の時間を要するため、その間は、切り換え後の目標位置から見て、ロータ32が“逆転”している状態となる。このため、逆転検出を正確に行い過ぎると(換言すれば後述する不感帯がないと)、F/B制御の途中で目標位置が切り換えられた場合に、目標位置の切り換え直後のロータ32の慣性による過渡的な挙動が“逆転”と判定されて、SRモータ12が強制的に停止されてしまう不具合が発生する。
【0045】
この対策として、本実施形態では、現在のエンコーダカウント値を前記最大値又は前記最小値と比較して逆転の有無を判定する際に、前記最大値及び前記最小値に対してそれぞれ所定カウント値分の不感帯を設定し、この不感帯内では逆転と判定しないようにしている。このようにすれば、F/B制御の途中で目標位置が切り換えられた場合でも、目標位置の切り換え直後のロータ32の慣性による過渡的な挙動を不感帯によって“逆転”と判定せずに済み、F/B制御の途中で目標位置が切り換えられた場合でも、ロータ32を目標位置まで回転駆動することができる。
【0046】
また、本実施形態では、逆転検出により通電相がホールドされている状態を検出したときにオープンループ制御に切り換え、エンコーダカウント値の情報をフィードバックせずに通電相を順次切り換えると共に、その通電相の切換回数をカウントしてそのカウント値に基づいてロータ32を目標位置まで回転駆動するようにしている。これにより、逆転検出により通電相がホールドされている状態から自動的にF/B制御可能な状態に復帰することができる。
以下、レンジ切換制御装置42のECU41によって実行される各ルーチンの処理内容を説明する。
【0047】
[エンコーダカウンタ]
図8に示すエンコーダカウンタルーチンの処理内容を説明する。本ルーチンは、AB相割り込み処理によりA相信号とB相信号の立ち上がり/立ち下がりの両方のエッジに同期して起動され、A相信号とB相信号の立ち上がり/立ち下がりの両方のエッジを次のようにしてカウントする。本ルーチンが起動されると、まずステップ301で、A相信号とB相信号の値A(i) 、B(i) を読み込み、次のステップ302で、図9のカウントアップ値ΔN算出マップを検索して、A相信号とB相信号の今回値A(i) 、B(i) と、前回値A(i−1) 、B(i−1) に応じたカウントアップ値ΔNを算出する。
【0048】
ここで、A相信号とB相信号の今回値A(i) 、B(i) と、前回値A(i−1) 、B(i−1) を用いる理由は、A相信号とB相信号の発生順序によってロータ32の回転方向を判定するためであり、図10に示すように、正回転(Pレンジ→NotPレンジの回転方向)ではカウントアップ値ΔNをプラス値にしてエンコーダカウント値Ncntをカウントアップし、逆回転(NotPレンジ→Pレンジの回転方向)ではカウントアップ値ΔNをマイナス値にしてエンコーダカウント値Ncntをカウントダウンする。
【0049】
カウントアップ値ΔNの算出後、ステップ303に進み、前回のエンコーダカウント値Ncntに上記ステップ302で算出したカウントアップ値ΔNを加算して、今回のエンコーダカウント値Ncntを求める。この後、ステップ304に進み、次回のカウント処理のために、A相信号とB相信号の今回値A(i) 、B(i) をそれぞれA(i−1) 、B(i−1) として記憶して本ルーチンを終了する。
以上説明したエンコーダカウンタルーチンは、特許請求の範囲でいうエンコーダカウント手段としての役割を果たす。
【0050】
[制御モード設定]
図11乃至図13に示す制御モード設定ルーチンは、初期駆動終了後に所定周期(例えば1ms周期)で実行される。ここで、初期駆動とは、ECU41への電源投入後にエンコーダカウント値と実際のロータ32の回転位置とを対応させるための処理であり、初期駆動時には、SRモータ12の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ46のA相信号及びB相信号のエッジをカウントし、初期駆動終了時のエンコーダカウント値とロータ32の回転位置(通電相)との対応関係を学習する。具体的には、初期駆動終了時のエンコーダカウント値を初期位置ずれ学習値として学習し、その後のF/B制御等の際にエンコーダカウント値を初期位置ずれ学習値で補正することで、初期駆動終了時のエンコーダカウント値と通電相(ロータ32の回転位置)とのずれを補正して、F/B制御等の際に正しい通電相を選択できるようにしている。
【0051】
図11乃至図13に示す制御モード設定ルーチンは、初期駆動終了後に所定周期(例えば1ms周期)で制御モード判定値modeを0、1、3、4、5のいずれかに設定して、下記のように制御モードを指定する。
【0052】
mode=0:通電オフ(スタンバイ)
mode=1:通常駆動
(F/B制御開始位置停止保持処理、時間同期通電相設定処理、F/B制御)
mode=3:目標位置停止保持処理
mode=4:反転位置停止保持処理
mode=5:オープンループ制御
【0053】
制御モード設定ルーチンが起動されると、まずステップ401で、システム故障フラグXfailoffがレンジ切換制御装置42の故障を意味するONにセットされているか否かを判定し、もし、Xfailoff=ONに設定されていれば、ステップ402に進み、SRモータ12を通電オフ状態に維持するための処理を実行する。これにより、回転方向指示値D=0(停止)、通電フラグXon=OFF(通電オフ)、F/B許可フラグXfb=OFF(F/B制御禁止)、制御モード判定値mode=0(通電オフ)にセットする。
【0054】
一方、システム故障フラグXfailoffがOFF(故障無し)の場合は、ステップ401からステップ403に進み、フェールセーフ処理実行フラグXfsop=OFF、且つ、リカバリ処理実行フラグXrcv=OFFであるか否かを判定する。もし、フェールセーフ処理実行フラグXfsopとリカバリ処理実行フラグXrcvのいずれか一方又は両方がONにセットされている場合は、ステップ404に進み、オープンループ制御を実行するために、回転方向指示値D=0(停止)、制御モード判定値mode=5(オープンループ制御)、F/B許可フラグXfb=OFF(F/B制御禁止)にセットする。
【0055】
フェールセーフ処理実行フラグXfsopとリカバリ処理実行フラグXrcvの両方がOFFにセットされている場合は、ステップ405に進み、通電フラグXon=ON(通電オン)にセットされているか否かを判定し、通電フラグXon=OFF(通電オフ)にセットされている場合は、ステップ406に進み、目標カウント値Acntとエンコーダカウント値Ncntとの差(目標位置とロータ32と位置との差)を求めて、この差(Acnt−Ncnt)に基づいて正回転(Pレンジ→NotPレンジ方向への回転)、逆回転(NotPレンジ→Pレンジ方向への回転)、停止のいずれに該当するか判定する。この際、エンコーダカウント値Ncntは、初期駆動で学習された初期位置ずれ学習値Gcntによって補正された値を用いる。
Ncnt=Ncnt−Gcnt
【0056】
目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が+Kth以上(例えば+10°以上)であれば、ロータ32を正回転方向(Pレンジ→NotPレンジの回転方向)に回転駆動する必要があると判断して、ステップ407に進み、回転方向指示値D=1(正回転)、通電フラグXon=ON(通電オン)、制御モード判定値mode=1(F/B制御開始位置停止保持処理及びF/B制御)にセットする。
【0057】
目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が−Kth以下(例えば−10°以下)であれば、ロータ32を逆回転方向(NotPレンジ→Pレンジの回転方向)に回転駆動する必要があると判断して、ステップ409に進み、回転方向指示値D=−1(逆回転)、通電フラグXon=ON(通電オン)、制御モード判定値mode=1(F/B制御開始位置停止保持処理及びF/B制御)にセットする。
【0058】
目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が−Kthから+Kthの範囲内(例えば−10°から+10°の範囲内)であれば、ロータ32を目標位置にディテントバネ23のバネ力により保持することが可能である(SRモータ12への通電は不要)と判断して、ステップ408に進み、SRモータ12を通電オフ状態に維持するために、回転方向指示値D=0(停止)、通電フラグXon=OFF(通電オフ)、制御モード判定値mode=0(通電オフ)にセットする。
【0059】
一方、前記ステップ405で、通電フラグXon=ON(通電オン)にセットされていると判定された場合は、図12のステップ410〜415の処理によって、指令シフトレンジ(目標位置)が反転されたか否かを判定し、反転されていれば、回転方向指示値Dを反転させる。
【0060】
具体的には、まずステップ410で、回転方向指示値D=1(正回転)であるか否かを判定し、回転方向指示値D=1(正回転)であれば、ステップ411に進み、目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)がマイナス値であるか否かで、ロータ32の回転方向を正回転から逆回転に反転させる必要があるか否かを判定し、その必要があれば、ステップ412に進み、回転方向指示値D=−1(逆回転)にセットする。
【0061】
これに対して、上記ステップ410で、回転方向指示値Dが1(正回転)でないと判定された場合(つまりD=0又は−1の場合)は、ステップ413に進み、回転方向指示値D=−1(逆回転)であるか否かを判定し、回転方向指示値D=−1(逆回転)であれば、ステップ414に進み、目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)がプラス値であるか否かで、ロータ32の回転方向を逆回転から正回転に反転させる必要があるか否かを判定し、その必要があれば、ステップ415に進み、回転方向指示値D=1(正回転)にセットする。
【0062】
以上のようにして、回転方向指示値Dが反転された場合は、ステップ416に進み、ロータ32の回転方向を反転させるために、制御モード判定値mode=4(反転位置停止保持処理)、F/B許可フラグXfb=OFF(F/B制御禁止)にセットしてステップ417に進む。これに対し、回転方向指示値Dが反転されない場合は、上記ステップ416の処理を行わずにステップ417に進む。
【0063】
このステップ417では、制御モード判定値mode=4(反転位置停止保持処理)にセットされているか否かを判定し、「Yes」であれば、ステップ418に進み、通電フラグXon=ON(通電オン)にセットして、反転位置停止保持処理を実行する。
【0064】
これに対して、上記ステップ417で「No」と判定された場合(反転位置停止保持処理ではない場合)は、図13のステップ419〜421で、F/B制御の終了タイミングであるか否かを判定する。具体的には、まずステップ419で、回転方向指示値D≧0(正回転又は停止)であるか否かを判定し、回転方向指示値D≧0であれば、ステップ420に進み、目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が+Kref以下(例えば+0.5°以下)であるか否かで、F/B制御の終了タイミングであるか否かを判定する。また、回転方向指示値D=−1(逆回転)であれば、ステップ421に進み、目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が−Kref以上(例えば−0.5°以上)であるか否かで、F/B制御の終了タイミングであるか否かを判定する。
【0065】
つまり、図14に示すように、F/B制御の終了判定値Krefを例えば通電相の位相進み分(例えば2〜4カウント分)に設定することで、目標カウント値Acntよりも通電相の位相進み分だけ前のタイミングでF/B制御を終了するようにしたものである。これにより、F/B制御の最後の通電相がロータ32を目標位置(目標カウント値Acnt)に停止保持する通電相と一致するようになる。
【0066】
上記ステップ420又は421で「No」と判定された場合(F/B制御の終了タイミングでない場合)は、ステップ422に進み、目標位置停止保持処理の時間をカウントする停止保持時間カウンタCTholdをリセットする。
【0067】
一方、上記ステップ420又は421で「Yes」と判定された場合(F/B制御の終了タイミングである場合)は、ステップ423に進み、F/B許可フラグXfb=OFF(F/B制御禁止)にセットし、F/B制御を終了して目標位置停止保持処理に移行する。そして、次のステップ424で、停止保持時間カウンタCTholdをカウントアップして、目標位置停止保持処理の時間をカウントする。
【0068】
この後、ステップ425に進み、目標位置停止保持処理の時間CTholdが所定時間(例えば50ms)に達したか否かを判定し、目標位置停止保持処理の時間CTholdが所定時間(例えば50ms)に達していなければ、ステップ426に進み、目標位置停止保持処理を続行するために、回転方向指示値D=0(停止)、通電フラグXon=ON(通電オン)、制御モード判定値mode=3(目標位置停止保持処理)に維持する。
【0069】
その後、目標位置停止保持処理の時間CTholdが所定時間(例えば50ms)に達した時点で、ステップ427に進み、SRモータ12の通電をオフするために、回転方向指示値D=0(停止)、通電フラグXon=OFF(通電オフ)、制御モード判定値mode=0(通電オフ)にセットする。
以上説明した制御モード判定値modeの設定例が図15のタイムチャートに示されている。
【0070】
[時間同期モータ制御]
図16に示す時間同期モータ制御ルーチンは、初期駆動終了後に所定周期(例えば1ms周期)で起動され、通常駆動(F/B制御開始位置停止保持処理、時間同期通電相設定処理、F/B制御)、目標位置停止保持処理、反転位置停止保持処理を実行する。
【0071】
本ルーチンが起動されると、まずステップ501で、制御モード判定値mode=1(通常駆動)であるか否かを判定し、制御モード判定値mode=1であれば、ステップ505に進み、後述する図17に示すmode1ルーチンを実行して、F/B制御開始位置停止保持処理時及び時間同期通電相設定処理時の通電相を設定するための通電相判定値Mptnを算出する。
【0072】
一方、上記ステップ501で、制御モード判定値mode=1でないと判定された場合は、ステップ502に進み、F/B許可フラグXfb=OFF(F/B制御禁止)であるか否かを判定し、F/B許可フラグXfb=ON(F/B制御実行)の場合は、以降の処理を行うことなく、本ルーチンを終了する。この場合は、後述する図22に示すF/B制御ルーチンによって通電相の設定と通電処理が実行される。
【0073】
本ルーチンでは、制御モード判定値mode=1の場合は、F/B制御中であっても、上記ステップ505の処理(図17のmode1ルーチン)が実行されるため、F/B制御中は、図22のF/B制御ルーチンによってエンコーダ46のA相・B相信号出力タイミングに同期して通電相を設定するF/B処理と、図17のmode1ルーチンによって所定周期で通電相を設定する時間同期通電相設定処理とが並行して実行される。これにより、F/B制御の途中で、何等かの原因でロータ32が一旦停止しても、時間同期通電相設定処理によって通電相判定値Mptnが算出され、ロータ32が目標位置に向かって回転駆動される。
【0074】
これに対し、上記ステップ502で、F/B許可フラグXfb=OFF(F/B制御禁止)と判定された場合は、ステップ503、504で、制御モード判定値mode=3,4のいずれかに該当するか否かを判定し、制御モード判定値mode=3(目標位置停止保持処理)の場合は、ステップ503からステップ506に進み、後述する図18に示すmode3ルーチンを実行して、目標位置停止保持処理実行時の通電相を設定するための通電相判定値Mptnを算出する。
【0075】
また、制御モード判定値mode=4(反転位置停止保持処理)の場合は、ステップ504からステップ507に進み、後述する図19に示すmode4ルーチンを実行して、反転位置停止保持処理実行時の通電相を設定するための通電相判定値Mptnを算出する。
【0076】
以上のようにして、制御モード判定値mode=1,3,4の場合は、通電相判定値Mptnを算出した後、ステップ508に進み、後述する図20に示す通電処理ルーチンを実行して、通常駆動、目標位置停止保持処理、反転位置停止保持処理を実行する。
【0077】
一方、上記ステップ503、504で、いずれも「No」と判定された場合、つまり、制御モード判定値mode=0,5の場合は、ステップ508に進み、後述する図20に示す通電処理ルーチンを実行して、通電オフ又はオープンループ制御を実行する。
【0078】
[mode1]
図17に示すmode1ルーチンは、図16の時間同期モータ制御ルーチンのステップ505で起動されるサブルーチンであり、F/B制御開始位置停止保持処理時及び時間同期通電相設定処理時の通電相判定値Mptn(通電相)を次のようにして設定する。
【0079】
本ルーチンが起動されると、まずステップ511で、F/B制御開始位置停止保持処理の時間をカウントする通電時間カウンタCT1をカウントアップし、次のステップ512で、F/B制御開始位置停止保持処理の時間CT1が所定時間(例えば10ms)を越えたか否かを判定する。
【0080】
もし、F/B制御開始位置停止保持処理の時間CT1が所定時間(例えば10ms)を越えていなければ、ステップ513に進み、停止保持時通電相記憶済みフラグXhold=OFF(未記憶)であるか否か(つまりF/B制御開始位置停止保持処理の開始直前のタイミングであるか否か)を判定し、停止保持時通電相記憶済みフラグXhold=OFFであれば、ステップ514に進み、F/B制御開始位置停止保持処理時の通電相判定値Mptnを現在の位置カウンタ値(Ncnt−Gcnt)にセットする。
【0081】
Mptn=Ncnt−Gcnt
ここで、位置カウンタ値(Ncnt−Gcnt)は、エンコーダカウント値Ncntを初期駆動時に学習された初期位置ずれ学習値Gcntで補正した値であり、ロータ32の現在位置を正確に表した値となっている。
【0082】
この後、ステップ515に進み、通電相判定値Mptnを“12”で割り算して、その余りMptn%12を求める。ここで、“12”は、通電相を一巡させる間のエンコーダカウント値Ncnt(通電相判定値Mptn)の増減量に相当する。このMptn%12の値に基づいて、図21の変換テーブルによって通電相が決定される。
【0083】
そして、次のステップ516で、Mptn%12=2,3,6,7,10,11であるか否かによって1相通電(U相通電、V相通電、W相通電)であるか否かを判定し、1相通電であれば、ステップ517に進み、通電相判定値Mptnを1ステップ分に相当する“2”だけ増加して2相通電(UV相通電、VW相通電、UW相通電)に補正する。これにより、F/B制御開始位置停止保持処理を1相通電と比べて保持トルクの大きい2相通電で実行することで、ロータ32がF/B制御開始位置付近で振動することを防止して、ロータ32をF/B制御開始位置に確実に停止保持できるようにする。
【0084】
そして、次のステップ518で、停止保持時通電相記憶済みフラグXhold=ON(記憶済み)にセットして本ルーチンを終了する。この後、本ルーチンが起動されたときには、ステップ513で「No」と判定され、ステップ514〜518の処理が実行されない。これにより、F/B制御開始位置停止保持処理時の通電相判定値Mptn(通電相)を設定する処理は、F/B制御開始位置停止保持処理の開始直前に1回のみ実行される。
【0085】
その後、F/B制御開始位置停止保持処理の時間CT1が所定時間(例えば10ms)を越えた時点で、ステップ512で「Yes」と判定されて、F/B制御開始位置停止保持処理を終了し、F/B制御に移行する。F/B制御中は、所定周期(例えば1ms周期)で本ルーチンを起動する毎に、ステップ519で、後述する図23に示す通電相設定ルーチンを実行し、通電相判定値Mptnを算出する。この処理が特許請求の範囲でいう第2の通電相設定手段としての役割を果たす。尚、図23の通電相設定ルーチンは、後述する図22に示すF/B制御ルーチンのステップ602でも起動される。この後、ステップ520に進み、F/B許可フラグXfb=ON(F/B制御実行)にセットする。
【0086】
前記図11〜図13の制御モード設定ルーチンでは、F/B制御により目標カウント値Acntとエンコーダカウント値Ncntとの差(Acnt−Ncnt)が所定値以下になった時点で、ロータ32が目標位置に到達した(F/B制御の終了タイミング)と判断して、F/B許可フラグXfb=OFFにセットし、F/B制御を終了して、制御モード判定値mode=3(目標位置停止保持処理)にセットし、その後、所定時間(例えば50ms)が経過した時点で、制御モード判定値mode=0(通電オフ)にセットする(図13のステップ419以降の処理参照)。
【0087】
従って、F/B制御終了後は、図17のmode1ルーチンが起動されないため、ステップ519の時間同期通電相設定処理による通電相の設定は、F/B制御開始からロータ32が目標位置に到達するまで(つまりF/B制御が終了するまで)実行される。
【0088】
図24はUW相から回転を開始する場合に最初に通電する相を説明するタイムチャートである。この場合、正回転(Pレンジ→NotPレンジ方向への回転)を開始する場合は、通電相判定値Mptnは、エンコーダカウント値Ncnt、初期位置ずれ学習値Gcnt、正回転方向位相進み量K1を用いて次式により算出される。
Mptn=Ncnt−Gcnt+K1
【0089】
ここで、正回転方向位相進み量K1を例えば4とすると、通電相判定値Mptnは、次式により算出される。
Mptn=Ncnt−Gcnt+4
UW相から正回転を開始する場合は、mod(Ncnt−Gcnt)は4となるため、Mptn%12=4+4=8となり、最初の通電相はUV相となる。
【0090】
一方、UW相から逆回転(NotPレンジ→Pレンジ方向への回転)を開始する場合は、逆回転方向位相進み量K2を例えば3とすると、通電相判定値Mptnは、次式により算出される。
Mptn=Ncnt−Gcnt−K2=Ncnt−Gcnt−3
UW相から逆回転を開始する場合は、Mptn%12=4−3=1となり、最初の通電相はVW相となる。
【0091】
このように、正回転方向位相進み量K1と逆回転方向位相進み量K2をそれぞれ4と3に設定することで、正回転方向と逆回転方向の通電相の切換パターンを対称にすることができ、正回転方向と逆回転方向のいずれの場合も、ロータ32の現在位置から2ステップ分ずらした位置の相を最初に励磁して回転を開始することができる。
【0092】
[mode3]
図18に示すmode3ルーチンは、図16の時間同期モータ制御ルーチンのステップ506で起動されるサブルーチンであり、目標位置停止保持処理時の通電相判定値Mptn(通電相)を次のようにして設定する。
【0093】
本ルーチンが起動されると、まずステップ531で、F/B制御終了時のMptn%12=2,3,6,7,10,11であるか否かによってF/B制御終了時の通電相が1相通電(U相通電、V相通電、W相通電)であるか否かを判定し、1相通電であれば、ステップ532〜534の処理によって、それまで行っていたF/B制御の回転方向に応じて通電相判定値Mptnを2だけ増加又は減少させることで、当該1相通電の次のステップの2相通電に変更する。
【0094】
この際、ステップ532で、回転方向を次のようにして判定する。本ルーチンに入る直前(F/B制御終了時)に、図13のステップ426で、回転方向指示値Dが0(停止)にセットされるため、回転方向指示値Dを見ても回転方向を判定することができない。そこで、本ルーチンでは、F/B制御終了時の通電相判定値Mptnと位置カウント値(Ncnt−Gcnt)との間に、通電相の位相進み量K1,K2分の差があることに着目し、F/B制御終了時の通電相判定値Mptnと位置カウント値(Ncnt−Gcnt)との大小関係によって回転方向を次のように判定する。
【0095】
Mptn>Ncnt−Gcntの場合は、正回転(Pレンジ→NotPレンジの回転方向)と判定して、ステップ533に進み、通電相判定値Mptnを2だけ増加させることで、2相通電に補正する。
【0096】
一方、Mptn<Ncnt−Gcntの場合は、逆回転(NotPレンジ→Pレンジの回転方向)と判定して、ステップ534に進み、通電相判定値Mptnを2だけ減少させることで、2相通電に補正する。
尚、Mptn=Ncnt−Gcntの場合は、停止と判定して、通電相は変更しない。
【0097】
このように、目標位置停止保持処理についても、F/B制御開始位置停止保持処理と同じく、1相通電と比べて保持トルクの大きい2相通電で実行することで、ロータ32が目標位置付近で振動することを防止して、ロータ32を目標位置で確実に停止保持できるようにする。
【0098】
[mode4]
図19に示すmode4ルーチンは、図16の時間同期モータ制御ルーチンのステップ507で起動されるサブルーチンであり、反転位置停止保持処理時の通電相判定値Mptn(通電相)を次のようにして設定する。
【0099】
本ルーチンが起動されると、まずステップ541で、反転位置停止保持処理の時間をカウントする通電時間カウンタCT4をカウントアップし、次のステップ542で、反転位置停止保持処理の時間CT4が所定時間(例えば50ms)を越えたか否かを判定する。
【0100】
もし、反転位置停止保持処理の時間CT4が所定時間(例えば50ms)を越えていなければ、ステップ543に進み、Mptn%12=2,3,6,7,10,11であるか否かによって現在の通電相が1相通電(U相通電、V相通電、W相通電)であるか否かを判定し、1相通電であれば、ステップ544〜546の処理によって、それまで行っていたF/B制御の回転方向に応じて通電相判定値Mptnを2だけ増加又は減少させることで、当該1相通電の次のステップの2相通電に変更する。このステップ543〜546の処理は、前記図18のmode3ルーチンのステップ531〜534の処理と同じである。
【0101】
このように、反転位置停止保持処理についても、F/B制御開始位置停止保持処理や目標位置停止保持処理と同じく、1相通電と比べて保持トルクの大きい2相通電で実行することで、ロータ32が反転位置付近で振動することを防止して、ロータ32を反転位置で確実に停止保持できるようにする。
【0102】
その後、反転位置停止保持処理の時間CT4が所定時間(例えば50ms)を越えた時点で、ステップ542で「Yes」と判定されて、反転位置停止保持処理を終了し、F/B制御を再開する。これにより、最初に、ステップ547で、反転位置停止保持処理時の通電相判定値Mptnに、回転方向に応じて通電相の位相進み分のカウント値(例えば4又は3)を加算又は減算してF/B制御再開時の最初の通電相判定値Mptnを設定し、それによって、ロータ32の回転駆動を開始する。この後、ステップ548に進み、F/B許可フラグXfb=ON(F/B制御実行)、通電時間カウンタCT4=0、制御モード判定値mode=1(通常駆動)にセットして本ルーチンを終了する。
【0103】
[通電処理]
図20に示す通電処理ルーチンは、図16の時間同期モータ制御ルーチンのステップ508で起動されるサブルーチンである。尚、本ルーチンは、後述する図22のF/B制御ルーチンのステップ603でも起動される。
【0104】
図20の通電処理ルーチンが起動されると、まずステップ551で、制御モード判定値mode=0(通電オフ)であるか否かを判定し、制御モード判定値mode=0(通電オフ)であれば、ステップ552に進み、SRモータ12の全相の通電をオフしてスタンバイ状態とする。
【0105】
一方、上記ステップ551で、「No」と判定されれば、ステップ553に進み、制御モード判定値mode=5(オープンループ制御)であるか否かを判定し、制御モード判定値mode=5(オープンループ制御)であれば、ステップ554に進み、オープンループ制御を実行する。このオープンループ制御は、エンコーダ46の故障又はSRモータ12の動作異常が発生したときに、例えば1ms周期の時間同期処理によって通電相を設定してロータ32を目標位置まで回転駆動する。
【0106】
また、上記ステップ551、553で、いずれも「No」と判定された場合、つまり、制御モード判定値mode=1,3,4(通常駆動、目標位置停止保持処理、反転位置停止保持処理)の場合は、ステップ555に進み、Mptn%12に応じて図21の変換テーブルによって通電相を設定し、その通電相の巻線33,34に通電する。
【0107】
[F/B制御]
次に、図22に示すF/B制御ルーチンの処理内容を説明する。本ルーチンは、AB相割り込み処理により実行され、初期駆動終了後にF/B制御実行条件が成立しているときに、ロータ32の回転位置(エンコーダカウント値Ncnt−Gcnt)が目標位置(目標カウント値Acnt)から例えば0.5°以内に到達するまで、エンコーダカウント値Ncntと初期位置ずれ学習値Gcntとに基づいて通電相を切り換えてロータ32を回転させる。
【0108】
図22のF/B制御ルーチンが起動されると、まずステップ601で、F/B許可フラグXfbがONにセットされているか否か(F/B制御実行条件が成立しているか否か)を判定し、F/B許可フラグXfbがOFF(F/B制御実行条件が不成立)であれば、以降の処理を行うことなく、本ルーチンを終了する。
【0109】
これに対し、F/B許可フラグXfbがONにセットされていれば、ステップ602に進み、後述する図23の通電相設定ルーチンを実行して、現在のエンコーダカウント値Ncntと初期位置ずれ学習値Gcntとに基づいて通電相を設定し(この処理が特許請求の範囲でいう第1の通電相設定手段としての役割を果たす)、次のステップ603で、図20の通電処理ルーチンを実行する。
【0110】
[通電相設定]
図23に示す通電相設定ルーチンは、図22のF/B制御ルーチンのステップ602と図17のmode1ルーチンのステップ519で起動されるサブルーチンであり、特許請求の範囲でいう逆転検出手段及び通電相ホールド手段としての役割を果たす。本ルーチンが起動されると、まずステップ611で、目標位置への回転方向を指示する回転方向指示値Dが正回転(Pレンジ→NotPレンジの回転方向)を意味する「1」であるか否かを判定する。その結果、回転方向指示値D=1(正回転)と判定されれば、ステップ612に進み、F/B開始時の1回目の励磁であるか否かを判定し、F/B開始時の1回目の励磁であると判定されれば、ステップ613に進み、後述する最大値Ncntmaxの初期値として現在のエンコーダカウント値Ncntをセットして、ステップ614に進むが、F/B開始時の1回目の励磁でなければ、上記ステップ613の処理を飛び越してステップ614に進む。
【0111】
このステップ614では、正回転駆動実行条件が成立しているか否かを次の2つの条件[A−1] 、[A−2] のいずれか一方を満たしている否かで判定する。
[A−1] 正回転駆動中に逆転が検出されていないこと
[A−2] F/B開始時の1回目の励磁であること
【0112】
上記[A−1] の条件は、現在のエンコーダカウント値Ncntが現在までのエンコーダカウント値の最大値Ncntmax以上であるか、又は最大値Ncntmaxよりも小さくなっても、不感帯ΔNnを越えて小さくならないことである。
Ncnt≧Ncntmax−ΔNn
【0113】
ここで、不感帯ΔNnは、例えば正回転駆動の途中で目標位置が切り換えられたときのロータ32の慣性による過渡的な挙動を“逆転”と判定するのを回避するためのものであり、本実施形態では、不感帯ΔNnを例えば2〜4カウントに設定している。
【0114】
上記2つの条件[A−1] 、[A−2] のいずれか一方を満たせば、正回転駆動実行条件が成立し、ステップ615に進み、現在のエンコーダカウント値Ncnt、初期位置ずれ学習値Gcnt、正回転方向位相進み量K1、速度位相進み補正量Ksを用いて通電相判定値Mptnを次式により更新する。
Mptn=Ncnt−Gcnt+K1+Ks
【0115】
ここで、正回転方向位相進み量K1は、ロータ32を正回転させるのに必要な通電相の位相進み量(ロータ32の現在の回転位相に対する通電相の位相進み量)であり、例えばK1=4に設定されている。
【0116】
また、速度位相進み補正量Ksは、ロータ32の回転速度に応じて設定される位相進み補正量であり、例えば、低速域では、速度位相進み補正量Ksが0に設定され、高速になるに従って、速度位相進み補正量Ksが例えば1又は2に増加される。これにより、ロータ32の回転速度に適した通電相となるように通電相判定値Mptnが補正される。
【0117】
通電相判定値Mptnの更新後、ステップ616に進み、現在のエンコーダカウント値Ncntが最大値Ncntmaxよりも大きいか否かを判定し、大きければ、ステップ617に進み、ECU42のメモリに記憶されている最大値Ncntmaxの記憶データを現在のエンコーダカウント値Ncntで書き換える。ロータ32が正回転している間は、エンコーダカウント値Ncntが周期的にカウントアップされるため、エンコーダカウント値の最大値Ncntmaxが周期的に更新される。
【0118】
一方、正回転駆動中に何等かの原因で逆転が発生してエンコーダカウント値Ncntがカウントダウンされたときには、上記ステップ616で「No」と判定され、エンコーダカウント値の最大値Ncntmaxの記憶データを更新せずに本ルーチンが終了する。これにより、正回転駆動中は、エンコーダカウント値の最大値NcntmaxがECU42のメモリに記憶される。
【0119】
一方、上記ステップ614で、上記2つの条件[A−1] 、[A−2] を両方とも満たさない場合、つまり、正回転駆動中に逆転が検出され(Ncnt<Ncntmax−ΔNn)、かつ2回目以降の励磁である場合は、正回転駆動実行条件が成立せず、そのまま本ルーチンを終了する。この場合は、逆転防止のために通電相判定値Mptnが更新されず、通電相が前回の通電相にホールドされて前回の通電相に通電され、ロータ32の逆転を抑制する方向に制動トルクが発生する。
【0120】
また、上記ステップ611で、回転方向指示値D=−1(逆回転)、つまりNotPレンジ→Pレンジの回転方向と判定された場合は、ステップ618に進み、F/B開始時の1回目の励磁であるか否かを判定し、F/B開始時の1回目の励磁であると判定されれば、ステップ619に進み、後述する最小値Ncntminの初期値として現在のエンコーダカウント値Ncntをセットして、ステップ620に進むが、F/B開始時の1回目の励磁でなければ、上記ステップ619の処理を飛び越してステップ620に進む。
【0121】
このステップ620では、逆回転駆動実行条件が成立しているか否かを次の2つの条件[B−1] 、[B−2] のいずれか一方を満たしている否かで判定する。
[B−1] 逆回転駆動中に逆転(正回転)が検出されていないこと
[B−2] F/B開始時の1回目の励磁であること
【0122】
上記[B−1] の条件は、現在のエンコーダカウント値Ncntが現在までのエンコーダカウント値の最小値Ncntmin以下であるか、又は最小値Ncntminよりも大きくなっても、不感帯ΔNpを越えて大きくならないことである。
Ncnt≦Ncntmin+ΔNp
【0123】
ここで、不感帯ΔNpは、例えば逆回転駆動の途中で目標位置が切り換えられたときのロータ32の慣性による過渡的な挙動を“逆転”と判定するのを回避するためのものであり、本実施形態では、不感帯ΔNpを例えば2〜4カウントに設定している。
【0124】
上記2つの条件[B−1] 、[B−2] のいずれか一方を満たせば、逆回転駆動実行条件が成立し、ステップ621に進み、現在のエンコーダカウント値Ncnt、初期位置ずれ学習値Gcnt、逆回転方向位相進み量K2、速度位相進み補正量Ksを用いて通電相判定値Mptnを次式により更新する。
Mptn=Ncnt−Gcnt−K2−Ks
【0125】
ここで、逆回転方向位相進み量K2は、ロータ32を逆回転させるのに必要な通電相の位相進み量(ロータ32の現在の回転位相に対する通電相の位相進み量)であり、例えばK2=3に設定されている。速度位相進み補正量Ksは正回転の場合と同じように設定される。
【0126】
通電相判定値Mptnの更新後、ステップ622に進み、現在のエンコーダカウント値Ncntが最小値Ncntminよりも小さいか否かを判定し、小さければ、ステップ623に進み、ECU42のメモリに記憶されている最小値Ncntminの記憶データを現在のエンコーダカウント値Ncntで書き換える。ロータ32が逆回転している間は、エンコーダカウント値Ncntが周期的にカウントダウンされるため、エンコーダカウント値の最小値Ncntminが周期的に更新される。
【0127】
一方、逆回転駆動中に何等かの原因で逆転が発生してエンコーダカウント値Ncntがカウントアップされたときには、上記ステップ622で「No」と判定され、エンコーダカウント値の最小値Ncntminの記憶データを更新せずに本ルーチンが終了する。これにより、逆回転駆動中は、エンコーダカウント値の最小値NcntminがECU42のメモリに記憶される。
【0128】
一方、上記ステップ620で、上記2つの条件[B−1] 、[B−2] を両方とも満たさない場合、つまり、逆回転駆動中に逆転が検出され(Ncnt>Ncntmax+ΔNp)、かつ2回目以降の励磁である場合は、逆回転駆動実行条件が成立せず、そのまま本ルーチンを終了する。この場合は、逆転防止のために通電相判定値Mptnが更新されず、通電相が前回の通電相にホールドされて前回の通電相に通電され、ロータ32の逆転を抑制する方向に制動トルクが発生する。
【0129】
以上のようにして、今回の通電相判定値Mptnを決定した後、図20の通電処理ルーチンを実行し、F/B制御中は、ステップ555で、図21の変換テーブルを検索して、Mptn%12に対応する通電相を選択し、その通電相の巻線33,34に通電する。
【0130】
図30は、不感帯ΔNnを2カウントに設定した場合の制御例を示している。エンコーダカウント値Ncntが最大値Ncntmaxに対する不感帯ΔNnの領域内であれば、逆転とは判定されず、通電相がホールドされない。不感帯ΔNnの領域内では、エンコーダカウント値Ncntが減少すれば、通電相判定値Mptnも減少して通電相が切り換えられる。その後、エンコーダカウント値Ncntが不感帯ΔNnを越えて小さくなった時点で、逆転と判定されて、通電相が前回の通電相にホールドされる。
【0131】
[フェールセーフ処理]
図25に示すフェールセーフ処理ルーチンは、所定周期で起動され、特許請求の範囲でいうオープンループ駆動手段としての役割を果たす。本ルーチンが起動されると、まずステップ701で、F/B制御中であるか否かを判定し、F/B制御中でなければ、そのまま本ルーチンを終了するが、F/B制御中であれば、ステップ702に進み、通電相ホールド中(モータ停止中)であるか否かを判定する。
【0132】
通電相ホールド中でなければ、そのまま本ルーチンを終了するが、通電相ホールド中であれば、ステップ702に進み、オープンループ制御に切り換える。このオープンループ制御では、エンコーダカウント値の情報をフィードバックせずに通電相を順次切り換えると共に、その通電相の切換回数をカウントしてそのカウント値に基づいてロータ32を目標位置まで回転駆動する。このようにすれば、逆転検出により通電相がホールドされている状態から自動的にF/B制御可能な状態に復帰することができる。
【0133】
以上説明した本実施形態では、SRモータ12のF/B制御開始からロータ32が目標位置に回転駆動されるまで、所定周期でエンコーダカウント値に基づいて通電相を設定する時間同期通電相設定処理をF/B制御と並行して実行するようにしたので、F/B制御の途中で、何等かの原因でロータ32の回転が一旦停止してエンコーダ46からA相・B相信号が出力されなくなった場合でも、時間同期通電相設定処理によってその時点のエンコーダカウント値に基づいて通電相を設定することができて、可能な限りロータ32を目標位置まで回転駆動することができる。
【0134】
しかも、本実施形態では、F/B制御中にエンコーダカウント値の最大値・最小値を逐次記憶しておき、現在のエンコーダカウント値を最大値・最小値と比較することで逆転の有無を判定するようにしたので、前回のF/B処理によるエンコーダカウント値の前回値が時間同期通電相設定処理によって更新されるという事情があっても(図27参照)、エンコーダカウント値の最大値・最小値を用いて逆転検出を行うことができる。これにより、F/B制御中に逆転が発生したときに通電相を前回の通電相にホールドすることが可能となり、時間同期通電相設定処理によって逆転し続けてしまうという不具合を解消できる。
【0135】
尚、逆転検出方法は本実施形態の方法に限定されず、例えば、A相信号とB相信号の発生順序によってロータ32の回転方向を判定して逆転を検出するようにしても良い。
【0136】
また、本実施形態では、現在のエンコーダカウント値を最大値又は最小値と比較して逆転の有無を判定する際に、最大値及び最小値に対してそれぞれ所定カウント値分の不感帯を設定し、この不感帯内では逆転と判定しないようにしたので、F/B制御の途中で目標位置が切り換えられた場合でも、目標位置の切り換え直後のロータ32の慣性による過渡的な挙動を不感帯によって“逆転”と判定せずに済み、F/B制御の途中で目標位置が切り換えられた場合でも、ロータ32を目標位置まで回転駆動することができる。
【0137】
但し、本発明は、不感帯を設ける構成に限定されず、例えば、常にモータ停止状態からF/B制御を開始するシステム等、本質的に逆転が発生しにくいシステムに本発明を適用する場合は、図29に示すように、不感帯をなくした構成としても良い。この構成では、現在のエンコーダカウント値が最大値よりも1カウントでも小さくなれば(又は最小値よりも1カウントでも大きくなれば)、逆転と判定され、直ちに通電相がホールドされる。
【0138】
尚、本実施形態では、F/B制御開始からロータ32が目標位置に回転駆動されるまでの全期間にわたって時間同期通電相設定処理を行うようにしたので、ロータ32がどの様なタイミングで停止しても、時間同期通電相設定処理によってロータ32の停止直後に遅れずに通電相を設定することができ、ロータ32の停止時間を短くすることができる利点がある。
【0139】
しかし、本発明は、ロータ32の回転速度が所定値以下の期間にロータ32が目標位置に回転駆動されるまで時間同期通電相設定処理を実行するようにしても良い。このようにすれば、ロータ32の回転速度が一時停止する可能性のある回転速度まで低下したときのみ、時間同期通電相設定処理を実行すれば良いため、ECU41のCPUの演算負荷を軽減できる利点がある。
【0140】
或は、F/B制御の途中でロータ32が停止したときのみ、時間同期通電相設定処理を実行するようにしても良い。
尚、本実施形態では、F/B制御中に、1相通電と2相通電とを交互に切り換える1−2相励磁方式で駆動するようにしたが、1相通電のみで駆動する1相励磁方式、又は、2相通電のみで駆動する2相励磁方式を採用しても良い。
【0141】
また、本発明に用いるエンコーダは、磁気式のエンコーダ46に限定されず、例えば、光学式のエンコーダやブラシ式のエンコーダを用いても良い。
また、本発明に用いるモータは、SRモータ12に限定されず、エンコーダの出力信号のカウント値に基づいてロータの回転位置を検出してモータの通電相を順次切り換えるブラシレス型のモータであれば、SRモータ以外のブラシレス型のモータを用いても良い。
【0142】
また、本実施形態のレンジ切換装置は、PレンジとNotPレンジの2つのレンジを切り換える構成であるが、例えば、ディテントレバー15の回動動作に連動して自動変速機のレンジ切換弁とマニュアルバルブを切り換えて、自動変速機のP、R、N、D等の各レンジを切り換えるレンジ切換装置にも本発明を適用して実施できる。
【0143】
その他、本発明は、レンジ切換装置に限定されず、SRモータ等のブラシレス型のモータを駆動源とする各種の装置に適用して実施できることは言うまでもない。
【図面の簡単な説明】
【図1】本発明の一実施形態を示すレンジ切換装置の斜視図
【図2】SRモータの構成を説明する図
【図3】SRモータを駆動する回路構成を示す回路図
【図4】レンジ切換装置の制御システム全体の構成を概略的に示す図
【図5】エンコーダのロータリマグネットの構成を説明する平面図
【図6】エンコーダの側面図
【図7】(a)はエンコーダの出力波形を示すタイムチャート、(b)は通電相切り換えパターンを示すタイムチャート
【図8】エンコーダカウンタルーチンの処理の流れを示すフローチャート
【図9】カウントアップ値ΔN算出マップの一例を示す図
【図10】指令レンジシフト、A相信号、B相信号、エンコーダカウント値の関係を示すタイムチャート
【図11】制御モード設定ルーチンの処理の流れを示すフローチャート(その1)
【図12】制御モード設定ルーチンの処理の流れを示すフローチャート(その2)
【図13】制御モード設定ルーチンの処理の流れを示すフローチャート(その3)
【図14】F/B制御から目標位置停止保持処理へ移行するタイミングを説明するタイムチャート
【図15】SRモータの制御例を示すタイムチャート
【図16】時間同期モータ制御ルーチンの処理の流れを示すフローチャート
【図17】mode1ルーチンの処理の流れを示すフローチャート
【図18】mode3ルーチンの処理の流れを示すフローチャート
【図19】mode4ルーチンの処理の流れを示すフローチャート
【図20】通電処理ルーチンの処理の流れを示すフローチャート
【図21】1−2相励磁方式の場合のMptn%12から通電相への変換テーブルの一例を示す図
【図22】F/B制御ルーチンの処理の流れを示すフローチャート
【図23】通電相設定ルーチンの処理の流れを示すフローチャート
【図24】UW相から回転を開始する時の通電処理を説明するタイムチャート
【図25】フェールセーフ処理ルーチンの処理の流れを示すフローチャート
【図26】従来の通電相ホールド処理の制御例を説明するタイムチャート
【図27】比較例の通電相ホールド処理の制御例を説明するタイムチャート
【図28】F/B制御の途中で目標位置が切り換えられたときのエンコーダカウント値の挙動を説明するタイムチャート
【図29】不感帯を設けない場合の本発明の通電相ホールド処理の制御例を説明するタイムチャート
【図30】不感帯を設けた場合の本発明の通電相ホールド処理の制御例を説明するタイムチャート
【符号の説明】
11…レンジ切換機構、12…SRモータ、14…出力軸センサ、15…ディテントレバー、18…パーキングロッド、20…パーキングギヤ、21…ロックレバー、23…ディテントバネ、24…Pレンジ保持凹部、25…NotPレンジ保持凹部、26…減速機構、27…自動変速機、31…ステータ、32…ロータ、33,34…巻線、35,36…モータ励磁部、37,38…モータドライバ、41…ECU(通電制御手段,第1の通電相設定手段,第2の通電相設定手段,エンコーダカウント手段,逆転検出手段,通電相ホールド手段,オープンループ駆動手段)、43…Pレンジスイッチ、44…NotPレンジスイッチ、46…エンコーダ、47…ロータリマグネット、48…A相信号用の磁気検出素子、49…B相信号用の磁気検出素子、50…Z相信号用の磁気検出素子。
Claims (7)
- 制御対象を回転駆動するモータのロータの回転に同期してパルス信号を出力するエンコーダと、このエンコーダのパルス信号のカウント値(以下「エンコーダカウント値」という)をカウントするエンコーダカウント手段とを備え、前記モータのフィードバック制御中に前記エンコーダカウント値に基づいて前記ロータの回転位置を検出して該ロータを目標位置まで回転駆動するように前記モータの通電相を順次切り換えるモータ制御装置において、
前記モータのフィードバック制御中に前記エンコーダのパルス信号出力タイミングに同期して前記エンコーダカウント値に基づいて通電相を設定する第1の通電相設定手段と、
前記ロータが前記目標位置に回転駆動されるまで時間同期処理によって所定周期で前記エンコーダカウント値に基づいて通電相を設定する第2の通電相設定手段と、
前記第1及び第2の各通電相設定手段によって通電相が設定される毎にその通電相の巻線に通電する通電制御手段と、
前記ロータを前記目標位置へ回転駆動する途中で該ロータの回転方向が逆転したときにその逆転を検出する逆転検出手段と、
前記逆転検出手段で逆転を検出したときに前記通電制御手段で通電する通電相を前回の通電相に固定する通電相ホールド手段と
を備えていることを特徴とするモータ制御装置。 - 前記エンコーダカウント手段は、前記ロータの正回転/逆回転の切り換えに応じて前記エンコーダカウント値のカウントアップ/カウントダウンを切り換え、
前記逆転検出手段は、前記ロータを前記エンコーダカウント値がカウントアップする方向に回転駆動しているときには該エンコーダカウント値の最大値を逐次記憶しておき、現在のエンコーダカウント値と前記最大値とを比較することで逆転の有無を判定し、前記ロータを前記エンコーダカウント値がカウントダウンする方向に回転駆動しているときには該エンコーダカウント値の最小値を逐次記憶しておき、現在のエンコーダカウント値と前記最小値とを比較することで逆転の有無を判定することを特徴とする請求項1に記載のモータ制御装置。 - 前記逆転検出手段は、現在のエンコーダカウント値を前記最大値又は前記最小値と比較して逆転の有無を判定する際に、前記最大値及び前記最小値に対してそれぞれ所定カウント値分の不感帯を設定し、この不感帯内では逆転と判定しないことを特徴とする請求項2に記載のモータ制御装置。
- 前記通電相ホールド手段で通電相が固定されている状態を検出したときにオープンループ制御に切り換え、前記エンコーダカウント値の情報をフィードバックせずに前記モータの通電相を順次切り換えると共に、その通電相の切換回数をカウントしてそのカウント値に基づいて前記ロータを前記目標位置まで回転駆動するオープンループ駆動手段を備えていることを特徴とする請求項1乃至3のいずれかに記載のモータ制御装置。
- 前記最大値又は前記最小値は、フィードバック制御開始時にそのときのエンコーダカウント値を初期値としてセットすることを特徴とする請求項1乃至4のいずれかに記載のモータ制御装置。
- 前記モータは、スイッチトリラクタンスモータであることを特徴とする請求項1乃至5のいずれかに記載のモータ制御装置。
- 前記モータは、車両の自動変速機のレンジを切り換えるレンジ切換機構を駆動することを特徴とする請求項1乃至6のいずれかに記載のモータ制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003074824A JP3871130B2 (ja) | 2003-03-19 | 2003-03-19 | モータ制御装置 |
| US10/674,437 US6992451B2 (en) | 2002-10-07 | 2003-10-01 | Motor control apparatus operable in fail-safe mode |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003074824A JP3871130B2 (ja) | 2003-03-19 | 2003-03-19 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004282970A true JP2004282970A (ja) | 2004-10-07 |
| JP3871130B2 JP3871130B2 (ja) | 2007-01-24 |
Family
ID=33290299
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003074824A Expired - Fee Related JP3871130B2 (ja) | 2002-10-07 | 2003-03-19 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3871130B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007247724A (ja) * | 2006-03-14 | 2007-09-27 | Toyota Motor Corp | 変速機のシフト制御装置 |
| JP2008278633A (ja) * | 2007-04-27 | 2008-11-13 | Hitachi Koki Co Ltd | 電動工具 |
| US8620537B2 (en) | 2007-03-01 | 2013-12-31 | Denso Corporation | Shift-by-wire system |
| JP2016014435A (ja) * | 2014-07-02 | 2016-01-28 | 株式会社デンソー | シフトレンジ切換制御装置 |
| CN108696198A (zh) * | 2017-04-03 | 2018-10-23 | 美蓓亚三美株式会社 | 马达驱动控制装置、马达驱动控制方法以及管泵 |
| JP2019088075A (ja) * | 2017-11-06 | 2019-06-06 | 株式会社デンソー | シフトレンジ制御装置 |
| CN113330281A (zh) * | 2019-01-25 | 2021-08-31 | 三菱电机株式会社 | 角度检测装置 |
-
2003
- 2003-03-19 JP JP2003074824A patent/JP3871130B2/ja not_active Expired - Fee Related
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007247724A (ja) * | 2006-03-14 | 2007-09-27 | Toyota Motor Corp | 変速機のシフト制御装置 |
| JP4577243B2 (ja) * | 2006-03-14 | 2010-11-10 | トヨタ自動車株式会社 | 変速機のシフト制御装置 |
| US8620537B2 (en) | 2007-03-01 | 2013-12-31 | Denso Corporation | Shift-by-wire system |
| JP2008278633A (ja) * | 2007-04-27 | 2008-11-13 | Hitachi Koki Co Ltd | 電動工具 |
| JP2016014435A (ja) * | 2014-07-02 | 2016-01-28 | 株式会社デンソー | シフトレンジ切換制御装置 |
| CN108696198A (zh) * | 2017-04-03 | 2018-10-23 | 美蓓亚三美株式会社 | 马达驱动控制装置、马达驱动控制方法以及管泵 |
| CN108696198B (zh) * | 2017-04-03 | 2023-04-28 | 美蓓亚三美株式会社 | 马达驱动控制装置、马达驱动控制方法以及管泵 |
| JP2019088075A (ja) * | 2017-11-06 | 2019-06-06 | 株式会社デンソー | シフトレンジ制御装置 |
| CN111295834A (zh) * | 2017-11-06 | 2020-06-16 | 株式会社电装 | 换挡挡位控制装置 |
| JP7009936B2 (ja) | 2017-11-06 | 2022-01-26 | 株式会社デンソー | シフトレンジ制御装置 |
| CN111295834B (zh) * | 2017-11-06 | 2023-08-11 | 株式会社电装 | 换挡挡位控制装置 |
| CN113330281A (zh) * | 2019-01-25 | 2021-08-31 | 三菱电机株式会社 | 角度检测装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3871130B2 (ja) | 2007-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6992451B2 (en) | Motor control apparatus operable in fail-safe mode | |
| US8917049B2 (en) | Motor control apparatus | |
| US7005814B2 (en) | Motor control apparatus having current supply phase correction | |
| JP4936069B2 (ja) | モータ制御装置 | |
| JP5648854B2 (ja) | モータ制御装置 | |
| JP5093624B2 (ja) | モータ制御装置 | |
| JP3800529B2 (ja) | モータ制御装置 | |
| JP2007336611A (ja) | 同期モータの制御装置 | |
| JP3849864B2 (ja) | モータ制御装置 | |
| JP2004023890A (ja) | モータ制御装置 | |
| JP4082164B2 (ja) | モータ制御装置 | |
| JP4189953B2 (ja) | 位置切換制御装置 | |
| JP3871130B2 (ja) | モータ制御装置 | |
| JP3849931B2 (ja) | モータ制御装置 | |
| JP3947922B2 (ja) | モータ制御装置 | |
| JP6547663B2 (ja) | 制御装置 | |
| JP3849627B2 (ja) | モータ制御装置 | |
| JP5472044B2 (ja) | モータ制御装置 | |
| JP3888278B2 (ja) | モータ制御装置 | |
| JP3888940B2 (ja) | モータ制御装置 | |
| JP3800532B2 (ja) | モータ制御装置 | |
| JP3849629B2 (ja) | モータ制御装置 | |
| JP2004023889A (ja) | モータ制御装置 | |
| JP4748611B2 (ja) | 位置切換制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050418 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060928 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3871130 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101027 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101027 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111027 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121027 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121027 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131027 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |