JP2004267217A - 害虫駆除方法及び装置 - Google Patents
害虫駆除方法及び装置 Download PDFInfo
- Publication number
- JP2004267217A JP2004267217A JP2004133789A JP2004133789A JP2004267217A JP 2004267217 A JP2004267217 A JP 2004267217A JP 2004133789 A JP2004133789 A JP 2004133789A JP 2004133789 A JP2004133789 A JP 2004133789A JP 2004267217 A JP2004267217 A JP 2004267217A
- Authority
- JP
- Japan
- Prior art keywords
- pest control
- pest
- control device
- bait
- control devices
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Catching Or Destruction (AREA)
Abstract
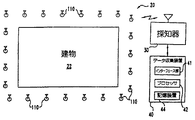
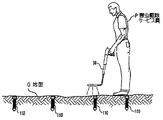
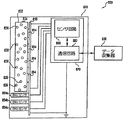
【解決手段】 害虫駆除システム20は、領域又は建物22の周りに設置された害虫駆除装置110を備える。装置110は各々、餌部材と、通信回路とを備える。通信回路は、餌状況を表示する情報と、害虫駆除装置110の各々の特徴的な標識とを伝送する受動型RFタグの形態である。通信回路を介して害虫駆除装置110の位置を探知し且つ害虫駆除装置110と接続し得るように携帯型の探知器30が設けられている。害虫駆除装置110から収集された情報を収集するデータ収集装置40を代替的又は追加的に利用可能である。餌部材は、目標とする種の害虫の餌消費振舞いを表示する磁気符号を提供し得るように磁気構成要素を備えてもよい。この装置は、必要に応じて、害虫の振舞いを表示し且つ予測する1つ又は2つ以上の環境センサを備える。
【選択図】 図1
Description
更に、害虫の活動に関するデータを収集するための代替的な技術も望まれる。例えば、害虫駆除サービスによりデータを収集するのに必要な時間を短くすることが望ましい。また、データを収集する技術の信頼性を高め且つより広汎な害虫の活動データを得ることも望ましい。
Claims (67)
- 通信回路を含む害虫駆除装置を設置することと、
設置後、害虫駆除装置から無線通信を受け取ることにより害虫駆除装置の位置を探知することとを備える、方法。 - 請求項1の方法において、前記害虫駆除装置が、前記設置の間、建物の周りの地中に少なくとも一部分が配置された複数の害虫駆除装置の1つであり、該害虫駆除装置の各々が携帯型探知器からの探知信号に応答して特徴的な標識を伝送し得る形態とされた受動型RFトランスミッタを有する、方法。
- 請求項2の方法において、前記害虫駆除装置の少なくとも一部が地中に設置され、前記位置探の後、前記害虫駆除装置の操作を行うことを更に備える、方法。
- 請求項1の方法において、前記位置探知が、探知器により害虫駆除装置のトランスミッタに対し位置探知信号を送ることと、位置探知信号に応答して害虫駆除装置から識別信号を受け取ることとを含む、方法。
- 請求項4の方法において、前記害虫駆除装置が、餌部材を含み、前記探知信号に応答して餌状況信号を受け取ることとを更に備える、方法。
- 請求項5の方法において、害虫駆除装置に関する情報を探知器からデータ収集装置に伝送することを更に備える、方法。
- 請求項1の方法において、前記害虫駆除装置には、前記設置の間、監視餌が設けられ、該監視餌の少なくとも部分的な消費を検知することと、該検知に応答して殺虫剤入り餌を設置することとを更に備える、方法。
- 各々が無線通信回路を有する複数の害虫駆除装置を設置することと、
第一の害虫駆除装置から無線通信により情報を受け取り得るように携帯型探知器を位置決めすることと、
第二の害虫駆除装置から無線通信により情報を受け取り得るように携帯型探知器の位置を変更することと、前記第二の害虫駆除装置が前記第一の害虫駆除装置から隔たられるようにすることとを備える、方法。 - 請求項8の方法において、前記第一の害虫駆除装置からの情報及び前記第二の害虫駆除装置からの情報をデータ収集装置に伝送することを更に備える、方法。
- 請求項8の方法において、第三の害虫駆除装置と通信し得るように探知器を再位置決めすることを更に備える、方法。
- 請求項8の方法において、害虫駆除装置が餌部材を備え、前記第一の害虫駆除装置からの前記情報が、害虫駆除装置の標識と、餌状況の表示とを含む、方法。
- 請求項8の方法において、前記害虫駆除装置の少なくとも1つにおける前記無線通信回路が受動型RFトランスミッタを含む、方法。
- 請求項8の方法において、前記設置が、前記害虫駆除装置の少なくとも1つを少なくとも部分的に地中に配置することと、前記害虫駆除装置の位置を探知器との無線通信を通じて探知することとを更に備える、方法。
- 請求項8の方法において、前記設置が、前記害虫駆除装置の第一のものを少なくとも部分的に地中に配置することと、前記第一の害虫駆除装置がシロアリに対する監視餌部材と共に設置されることと、
前記探知器により得られた前記第一の害虫駆除装置に関する情報から監視餌部材の少なくとも部分的な消費を検知することと、
該検知に応答してシロアリに対する殺虫剤入り餌部材を設置することとを更に備える、方法。 - 請求項8の方法において、前記害虫駆除装置の各々が、1つ又は2つ以上の種の害虫に対する食餌可能な餌部材を含み、前記害虫駆除装置の各々から得られた餌状況の情報を探知器により評価し、何れの害虫駆除装置が1つ又は2つ以上の種の害虫を誘引するかを識別することと、前記評価に基づいて1つ又は2つ以上の種の害虫の更なる振舞いを予測することとを更に備える、方法。
- 害虫駆除装置において、1つ又は2つ以上の種の害虫により消費され又は変位されるように作動可能な少なくとも1つの餌部材と、無線励起信号に応答して前記害虫駆除装置に関する情報を伝送する受動型RF通信回路とを備える、害虫駆除装置。
- 請求項16の装置において、能動型RF回路を更に備える、装置。
- 請求項16の装置において、前記受動型RF回路が、前記情報中に特徴的な識別信号を含むように作動可能であり、前記識別信号が、害虫駆除装置に割り当てられた別個の多数ビットコードに相応する、装置。
- 請求項16の装置において、前記受動型RF通信回路に接続された導電性ループを更に備え、該ループが、前記餌部材の消費又は変位の間、変更可能なように配置されて、前記ループが電気的に閉じられたことを表示する第一の状況と、前記ループが電気的に開放したことを表示する第二の状況とを有する状況信号を提供する、装置。
- 請求項16の装置において、前記餌部材と、前記受動型RF通信回路とを保持するハウジングを更に備える、装置。
- 請求項16の装置において、前記餌部材が、1つ又は2つ以上の害虫による前記餌部材の消費に相応する磁気符号を提供する磁気材料を含む、装置。
- 請求項16の装置において、温度、湿度又は大気圧力の少なくとも1つの変化を測定するセンサを更に備える、装置。
- 各々が1つ又は2つ以上の害虫から保護すべき領域内で互いに隔てられるように配置された少なくとも2つの害虫駆除装置を備え、該害虫駆除装置の各々が、励起信号に応答可能な受動型RF通信回路を含む、組合せ体。
- 請求項23の組合せ体において、前記受動型RF通信回路が、前記害虫駆除装置の各々に対し異なる識別信号を提供するように作動可能である、組合せ体。
- 請求項24の組合せ体において、前記害虫駆除装置の少なくとも1つが、前記1つ又は2つ以上の害虫による1つの部材の消費又は変位を表示する状況信号を提供するように作動可能な害虫センサを含む、組合せ体。
- 請求項25の組合せ体において、前記励起信号を出力すると共に、前記励起信号に応答して前記異なる識別信号及び前記状況信号に相応するデータを受け取る作動可能な探知器を更に備える、組合せ体。
- 請求項26の組合せ体において、前記探知器が、無線通信により前記害虫駆除装置の各々の位置を探知するように作動可能な携帯型の形態である、組合せ体。
- 請求項27の組合せ体において、前記データを前記探知器から受け取る作動可能なデータ収集装置を更に備える、組合せ体。
- 複数の害虫駆除装置であって、該害虫駆除装置が2つ又はそれ以上の各々が無線通信回路を含み、選択した領域を1つ又は2つ以上の種の害虫から保護し得るように独立的に設置可能に配置される、前記複数の害虫駆除装置と、
前記2つ又はそれ以上の害虫駆除装置の各々と個々に無線通信を確立するように作動可能な携帯型探知器と、該探知器と前記2つ又はそれ以上の害虫駆除装置のそれぞれの1つとの間の前記通信が、前記2つ又はそれ以上の害虫駆除装置に対する前記探知器の位置に従って選択可能であることと、
前記害虫駆除装置の1つ又は2つ以上に関する情報を前記探知器から受け取るように作動可能なデータ収集装置とを備える、システム。 - 請求項29のシステムにおいて、前記無線通信回路が、前記探知器からの励起信号により励起される受動型RFトランスポンダを含む、システム。
- 請求項30のシステムにおいて、前記無線通信回路が、能動型RF通信回路を含む、システム。
- 請求項29のシステムにおいて、前記害虫駆除装置の少なくとも1つが磁気材料を含む餌を備える、システム。
- 請求項29のシステムにおいて、前記害虫駆除装置の少なくとも1つが環境センサを含む、システム。
- 請求項29のシステムにおいて、前記2つ又はそれ以上の害虫駆除装置の各々に対する前記無線通信回路が、前記探知器からの信号に応答して前記2つ又はそれ以上の害虫駆除装置の各々を特徴的に識別する異なる識別信号を伝送するように作動可能である、システム。
- 請求項29のシステムにおいて、前記害虫駆除装置の各々が、前記無線通信回路と、前記1つ又は2つ以上の種の害虫に対する餌部材と、前記無線通信回路に接続された導電性の害虫検知ループとを備え、前記害虫検知ループが、前記1つ又は2つ以上の種の害虫により変更され、前記探知器からの信号に応答して前記無線通信回路を通じて害虫の検知信号を提供するように配置される、システム。
- 害虫感知部材を含む少なくとも1つの害虫駆除装置を備え、前記部材が磁気材料を含み、該磁気材料が、1つ又は2つ以上の害虫により前記磁気材料を前記部材から除去することに応答して変化する磁界を提供し、前記少なくとも1つの害虫除去装置が、前記磁界に相応する1つの信号を発生させ得るように作動可能な回路を更に備える、システム。
- 請求項36のシステムにおいて、前記回路が無線通信可能な更なる形態とされる、システム。
- 請求項37のシステムにおいて、前記無線通信により伝送された情報を受け取り得るように作動可能な装置を更に備える、システム。
- 請求項38のシステムにおいて、前記回路が少なくとも1つの磁気レジスタを含む、システム。
- 請求項36のシステムにおいて、前記害虫感知部材が、前記磁気材料を含む餌としての形態とされ、前記感知信号が、前記餌が消費されるに伴い変化する磁気符号に相応する、システム。
- 請求項36のシステムにおいて、前記少なくとも1つの害虫駆除装置が、温度、湿度及び大気圧力の少なくとも1つを測定するセンサを更に備える、システム。
- 請求項36のシステムにおいて、前記少なくとも1つの害虫駆除装置が複数である、システム。
- 少なくとも1つの種の害虫を感知する部材と、通信回路とを含む少なくとも1つの害虫駆除装置を備え、前記通信回路が、装置の識別コード及び害虫の検知情報を伝送するように作動可能である、システム。
- 請求項43のシステムにおいて、励起信号を発生させる作用可能な探知器を更に備え、前記通信回路が、前記装置の識別コード及び前記害虫の検知情報を伝送するように前記励起信号に応答可能な受動型RF伝送回路を含む、システム。
- 請求項44のシステムにおいて、前記探知器からデータを受け取るように作動可能なデータ収集装置を更に備える、システム。
- 請求項43のシステムにおいて、前記通信回路が能動型RFトランスミッタ/レシーバを備える、システム。
- 請求項43のシステムにおいて、前記少なくとも1つの害虫駆除装置が、温度、湿度及び大気圧力の少なくとも1つを測定するセンサを更に備える、システム。
- 請求項43のシステムにおいて、前記部材が、前記磁気材料を前記部材から除去する程度を表示する磁気符号を提供する磁気材料を含む、システム。
- 請求項43のシステムにおいて、前記少なくとも1つの害虫駆除装置が複数である、システム。
- 害虫センサと、第一の環境センサと、前記第一の環境センサにより検知された第一の環境の特徴及び前記害虫センサにより決定された害虫の検知状況に相応する情報を通信するように作動可能な回路とを有する少なくとも1つの害虫駆除装置を備える、システム。
- 請求項50のシステムにおいて、励起信号を発生させるように作動可能な探知器を更に備え、前記回路が、前記情報を伝送し得るように前記励起信号に応答可能な受動型RFトランスミッタを更に画成する、システム。
- 請求項51のシステムにおいて、前記探知器からデータを受け取るように作動可能なデータ収集装置を更に備える、システム。
- 請求項50のシステムにおいて、前記第一の回路が、能動型のRFトランスミッタ/レシーバを画成する、システム。
- 請求項50のシステムにおいて、前記害虫センサが、前記磁気材料を前記部材から除去する程度を表示する磁気符号を提供する磁気材料を有する部材を含む、システム。
- 請求項50のシステムにおいて、前記少なくとも1つの害虫駆除装置が複数である、システム。
- 各々が1つ又は2つ以上の種の害虫に対する餌と、無線通信回路とを含む複数の害虫駆除装置を設置することと、
前記害虫駆除装置を無線通信装置により探知することと、前記無線通信装置が、各々前記探知中、害虫駆除装置の異なる1つに相応する複数の識別信号を受け取ることとを備える、方法。 - 請求項56の方法において、前記無線通信装置により前記害虫駆除装置の各々から害虫の活動状況の情報を受け取ることを更に備える、方法。
- 請求項57の方法において、前記無線通信装置から前記データ収集装置にデータを伝送することを更に備える、方法。
- 請求項56の方法において、前記無線通信装置が携帯型の無線探知器の形態である、方法。
- 請求項59の方法において、前記探知器により前記害虫駆除装置の各々の位置を探知することを更に備える、方法。
- 請求項59の方法において、前記無線通信回路が、該無線通信装置からの励起信号に応答可能な受動型RFトランスポンダを含み、該受動型RFトランスポンダが、識別信号及び害虫の活動を表示する状況信号のそれぞれ1つを送る、方法。
- 請求項56の方法において、前記害虫駆除装置の各々が、温度、湿度及び大気圧力の少なくとも1つを測定するセンサを備える、方法。
- 請求項62の方法において、前記害虫駆除装置の各々に対するセンサからのデータを前記無線通信装置に送ることと、該データを害虫駆除装置内で害虫の活動と比較することと、該比較に基づいて害虫の振舞いを予測することとを更に備える、方法。
- 請求項56の方法において、前記害虫駆除装置の少なくとも1つに対する前記餌が、該餌の消費に相応する磁気符号を提供するように作動可能な磁気材料を含む、方法。
- 請求項64の方法において、害虫の餌消費の振舞いを評価し得るように前記磁気符号を監視することを更に備える、方法。
- 請求項56の方法において、前記害虫駆除装置の各々の前記餌が、地中シロアリにより食餌可能であるように選ばれ、前記設置が、害虫駆除装置の少なくとも一部を少なくとも部分的に地中に配置することを含む、方法。
- 請求項56の方法において、該害虫駆除装置の各々に対する前記餌が害虫の活動監視型式のものであり、
前記探知器により得られたデータから害虫駆除装置の少なくとも1つに対する餌の少なくとも部分的な消費を検知することと、
該検知に応答して殺虫剤入り餌部材を設置することとを備える、方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004133789A JP2004267217A (ja) | 2004-04-28 | 2004-04-28 | 害虫駆除方法及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004133789A JP2004267217A (ja) | 2004-04-28 | 2004-04-28 | 害虫駆除方法及び装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001511752A Division JP2003505050A (ja) | 1999-07-21 | 1999-07-21 | 害虫駆除方法 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006199150A Division JP2006340721A (ja) | 2006-07-21 | 2006-07-21 | 害虫駆除方法及び装置 |
| JP2009271179A Division JP2010046095A (ja) | 2009-11-30 | 2009-11-30 | 害虫駆除方法及び装置 |
| JP2010126846A Division JP5255601B2 (ja) | 2010-06-02 | 2010-06-02 | 害虫駆除方法及び装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004267217A true JP2004267217A (ja) | 2004-09-30 |
| JP2004267217A5 JP2004267217A5 (ja) | 2006-11-02 |
Family
ID=33128579
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004133789A Pending JP2004267217A (ja) | 2004-04-28 | 2004-04-28 | 害虫駆除方法及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004267217A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010512789A (ja) * | 2006-12-19 | 2010-04-30 | ダウ アグロサイエンシィズ エルエルシー | 信頼性の高い有害生物検出 |
| JP2011520468A (ja) * | 2008-05-23 | 2011-07-21 | ビー・エイ・エス・エフ、コーポレーション | 害虫駆除システム及びその方法 |
| JP2019525775A (ja) * | 2016-07-20 | 2019-09-12 | アザレロ、マーカス | 有害生物の駆除装置及び方法 |
-
2004
- 2004-04-28 JP JP2004133789A patent/JP2004267217A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010512789A (ja) * | 2006-12-19 | 2010-04-30 | ダウ アグロサイエンシィズ エルエルシー | 信頼性の高い有害生物検出 |
| JP2011520468A (ja) * | 2008-05-23 | 2011-07-21 | ビー・エイ・エス・エフ、コーポレーション | 害虫駆除システム及びその方法 |
| JP2019525775A (ja) * | 2016-07-20 | 2019-09-12 | アザレロ、マーカス | 有害生物の駆除装置及び方法 |
| JP7000427B2 (ja) | 2016-07-20 | 2022-01-19 | アザレロ、マーカス | 有害生物の駆除装置及び方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7348890B2 (en) | Pest control techniques | |
| AU2011201533B2 (en) | Pest control techniques | |
| US6724312B1 (en) | Pest control apparatus and methods | |
| US9510582B2 (en) | Polymodal detection notification and first response pest treatment system | |
| CN100363954C (zh) | 用于虫害防治的感测装置、系统和方法 | |
| US20070192032A1 (en) | Polymodal biological detection system | |
| JP2004267217A (ja) | 害虫駆除方法及び装置 | |
| JP5255600B2 (ja) | 害虫駆除方法及び装置 | |
| JP2006340721A (ja) | 害虫駆除方法及び装置 | |
| JP5255601B2 (ja) | 害虫駆除方法及び装置 | |
| JP2010046095A (ja) | 害虫駆除方法及び装置 | |
| JP2006254910A (ja) | 害虫駆除用の感知デバイス、システム、および方法 | |
| AU2012241119B2 (en) | Pest control techniques | |
| CN1636452B (zh) | 用于定位虫害控制装置的方法和虫害控制系统 | |
| JP2004267217A5 (ja) | ||
| ES2238099T3 (es) | Tecnicas de control de plagas. | |
| ES2390566T3 (es) | Métodos, sistemas y dispositivos de detección particularmente para el control de plagas |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060720 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060721 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060721 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090728 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091027 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091030 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100202 |