JP2004207648A - 基板の搬送装置 - Google Patents
基板の搬送装置 Download PDFInfo
- Publication number
- JP2004207648A JP2004207648A JP2002377737A JP2002377737A JP2004207648A JP 2004207648 A JP2004207648 A JP 2004207648A JP 2002377737 A JP2002377737 A JP 2002377737A JP 2002377737 A JP2002377737 A JP 2002377737A JP 2004207648 A JP2004207648 A JP 2004207648A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- arm
- hole
- housing
- arm member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【課題】パーティクル等の基板への付着を防止できる搬送装置を提供する。
【解決手段】基板処理装置やウエハ搬出入室等を備えるクラスタ基板処理システムが有する搬送室の内部に配設された基板ハンドリング機構16は、円柱体でる回転部20、棒体であるアーム部21及び基板Wを拘持する拘持部22とから成り、回転部20は、クラスタ基板処理システムを上方から見たときに、その中心部において回転自在に搬送室の床面に接続され、アーム部21は、その一端において回転部20の外縁近傍と回転自在に接続され、拘持部22はアーム部21の他端に回転自在に接続され、基板ハンドリング機構において基板Wを搬送するとき、回転部20、アーム部21及び拘持部22が協動して基板Wを基板処理装置やウエハ搬出入室における所望の位置に搬出入する。
【選択図】 図2
【解決手段】基板処理装置やウエハ搬出入室等を備えるクラスタ基板処理システムが有する搬送室の内部に配設された基板ハンドリング機構16は、円柱体でる回転部20、棒体であるアーム部21及び基板Wを拘持する拘持部22とから成り、回転部20は、クラスタ基板処理システムを上方から見たときに、その中心部において回転自在に搬送室の床面に接続され、アーム部21は、その一端において回転部20の外縁近傍と回転自在に接続され、拘持部22はアーム部21の他端に回転自在に接続され、基板ハンドリング機構において基板Wを搬送するとき、回転部20、アーム部21及び拘持部22が協動して基板Wを基板処理装置やウエハ搬出入室における所望の位置に搬出入する。
【選択図】 図2
Description
【0001】
【産業上の利用分野】
本発明は、基板の搬送装置、特に半導体ウエハ等の基板の搬送装置に関する。
【0002】
【従来の技術】
従来、イオンドープ、成膜、エッチング等の各種処理を半導体ウエハ等の基板Wに施す基板処理システムとして、スループット及び歩留まりの向上を目的とし、同じ処理を行う複数の基板処理装置や、異なる処理を行う複数の基板処理装置が共通の搬送室を介して放射状に配設されたクラスタ基板処理システムが知られている。
【0003】
このクラスタ基板処理システムでは、各基板処理装置において処理済の基板Wと未処理の基板Wとを入れ換えるため、基板Wを搬送する搬送機構が搬送室に配設される。このような搬送機構の代表例としては、下記に示すスカラアーム式ハンドリング機構及びフロッグレッグ式ハンドリング機構が知られている(例えば、特許文献1参照。)。
【0004】
図12は、スカラアーム式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【0005】
図12において、クラスタ基板処理システム120は、その内部において基板Wを処理する2つの基板処理装置121と、ウエハカセット(不図示)から基板Wを搬出入するロードロック室122と、ロードロック室122から基板Wの搬入、又はロードロック室122への基板Wの搬出を行う2つのウエハ搬出入室123と、基板処理装置121及びウエハ搬出入室123を接続する搬送室124とを備え、搬送室124はその内部にスカラアーム式ハンドリング機構125を有する。
【0006】
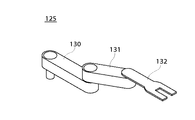
スカラアーム式ハンドリング機構125は、図13に示すように、棒状の第1アーム部130、棒状の第2アーム部131及び基板Wを拘持する拘持部132とから成り、第1アーム部130は、その一端においてクラスタ基板処理システム120を上方から見たときに回転自在となるように、搬送室124の床面に接続され、第2アーム部131は、その一端において第1アーム部130の他端に回転自在に接続され、拘持部132は、第2アーム部131の他端に接続される。
【0007】
スカラアーム式ハンドリング機構125において基板Wを搬送するとき、第1アーム部130、第2アーム部131及び拘持部132が協動して基板Wを基板処理装置121やウエハ搬出入室123における所望の位置に搬出入する。
【0008】
図14は、フロッグレッグ式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【0009】
図14において、クラスタ基板処理システム140は、その内部において基板Wを処理する4つの基板処理装置141と、ロードロック室(不図示)から基板Wの搬入、又はロードロック室への基板Wの搬出を行う2つのウエハ搬出入室142と、基板処理装置141及びウエハ搬出入室142を接続する搬送室143とを備え、搬送室143はその内部にフロッグレッグ式ハンドリング機構144を有する。
【0010】
フロッグレッグ式ハンドリング機構144は、搬送室143の床面に垂直に立設された柱状の基部145と、平行に配設された2本の棒状部材からなる第1アーム部146及び棒状の第2アーム部147が構成する2つのフロッグレッグ部148と、基板Wを拘持する拘持部149とから成り、第1アーム部146は、その一端において基部145の側面に周方向に関して移動自在に接続され、第2アーム部147は、その一端において第1アーム部146の他端に回転自在に接続され、拘持部149は、第2アーム部147の他端に接続される。
【0011】
フロッグレッグ式ハンドリング機構144において基板Wを搬送するとき、第1アーム部146、第2アーム部147及び拘持部149が協動して基板Wを基板処理装置141やウエハ搬出入室142における所望の位置に搬出入する。
【0012】
【特許文献1】
特開平10−154739号公報(第1図、第3図)
【0013】
【発明が解決しようとする課題】
しかしながら、図15に示すように、クラスタ基板処理システム120における搬送室124内部において、第1アーム部130が回転移動する空間150には干渉物となるものを配設することができず、搬送室124内部の空間容積が大となる傾向がある。また、基板Wの基板処理装置121への搬入の際、基板処理装置121内部の真空度を維持するために、搬送室124内部は減圧されるが、搬送室124内部を完全に真空にすることは困難であり、多少の気体が残留する。
【0014】
このとき、上述したように搬送室124内部の空間容積が大となると、第1アーム部130が回転移動することによって空間150において気流の乱れが発生してパーティクル等が巻上げられ、該巻き上げられたパーティクル等が基板Wに付着するという問題があった。
【0015】
また、第1アーム部130は棒状であるため、長手方向において撓み量が大となる傾向がある。このように撓み量が大となると、第2アーム部131や拘持部132の位置精度が悪化し、基板Wの搬送時に搬送室124の筐体と干渉するおそれがあるため、搬送室124の開口部151の面積を大きくする必要があるが、開口部151の開口部の面積を大きくすると外部からのパーティクル等の侵入が容易となり、その結果、侵入したパーティクル等が基板Wに付着するという問題があった。
【0016】
これらの問題はフロッグレッグ式ハンドリング機構144が配設されたクラスタ基板処理システム140でも同様に発生する。
【0017】
本発明の目的は、パーティクル等の基板への付着を防止できる搬送装置を提供することにある。
【0018】
【課題を解決するための手段】
上記目的を達成するために、請求項1記載の基板の搬送装置は、基板を支持する少なくとも2つの腕部材を備えると共に所定の筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方に回転自在に接続される基板の搬送装置において、前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記一端までの距離よりも大きいことを特徴とする。
【0019】
請求項1記載の搬送装置によれば、少なくとも2つの腕部材を備えると共に筐体内部に配設された基板の搬送装置において、腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から一端までの距離よりも大きいので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体における腕部材用の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0020】
請求項2記載の搬送装置は、請求項1記載の搬送装置において、前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容することを特徴とする。
【0021】
請求項2記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0022】
請求項3記載の搬送装置は、請求項2記載の搬送装置において、前記腕部材収容孔の直径は、前記円柱体の直径とほぼ一致することを特徴とする。
【0023】
請求項3記載の搬送装置によれば、腕部材収容孔の直径は、円柱体の直径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0024】
請求項4記載の搬送装置は、請求項1乃至3のいずれか1項に記載の搬送装置において、前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記筐体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有することを特徴とする。
【0025】
請求項4記載の搬送装置によれば、腕部材の一方である円柱体は中心軸方向に沿って穿孔された貫通孔を有し、筐体は貫通孔に対応する位置に穿孔された他の貫通孔を有するので、当該貫通孔及び他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0026】
請求項5記載の搬送装置は、請求項1乃至4のいずれか1項に記載の搬送装置において、前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする。
【0027】
請求項5記載の搬送装置によれば、腕部材の一方である円柱体にはその中心軸に沿った円柱孔が穿孔されているので、腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0028】
上記目的を達成するために、請求項6記載の搬送装置は、基板を支持する少なくとも2つの腕部材を備えると共に筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方の一端と回転自在に接続される屈折構造を少なくとも2つ備える基板の搬送装置において、前記屈折構造の一方における前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記腕部材の他方の一端までの距離よりも小さく、且つ前記屈折構造の他方における前記腕部材の一方は、前記円柱体の中心軸に沿って配設された環状体であることを特徴とする。
【0029】
請求項6記載の搬送装置によれば、少なくとも2つの腕部材から成る2つの屈折構造を備えると共に筐体内部に配設された基板の搬送装置では、屈折構造の一方における腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から腕部材の他方の一端までの距離よりも小さく、且つ屈折構造の他方における腕部材の一方は、円柱体の中心軸に沿って配設された環状体であるので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0030】
請求項7記載の搬送装置は、請求項6記載の搬送装置において、前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容することを特徴とする。
【0031】
請求項7記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0032】
請求項8記載の搬送装置は、請求項7記載の搬送装置において、前記腕部材収容孔の直径は、前記環状体の外径とほぼ一致することを特徴とする。
【0033】
請求項8記載の搬送装置によれば、腕部材収容孔の直径は、環状体の外径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0034】
請求項9記載の搬送装置は、請求項6乃至8のいずれか1項に記載の搬送装置において、前記屈折構造の一方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離は、前記屈折構造の他方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離と等しいことを特徴とする。
【0035】
請求項9記載の搬送装置によれば、屈折構造の一方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離は、屈折構造の他方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離と等しいので、円柱体と環状体の回転角度を揃えれば、屈折構造の動作を同調させることができ、基板を正確に所望の位置に搬送できる。
【0036】
請求項10記載の搬送装置は、請求項6乃至9のいずれか1項に記載の搬送装置において、前記屈折構造の各々を、前記腕部材の他方の他端において互いに接続する基板拘持部を備えることを特徴とする。
【0037】
請求項10記載の搬送装置によれば、屈折構造の各々を、腕部材の他方の他端において互いに接続する基板拘持部を備えるので、屈折構造の動作をより正確に同調させることができ、基板をより正確に所望の位置に搬送できる。
【0038】
請求項11記載の搬送装置は、請求項10記載の搬送装置において、前記基板拘持部は、前記屈折構造の一方における前記腕部材の他方の回転角と、前記屈折構造の他方における前記腕部材の他方の回転角とを整合する整合構造を有することを特徴とする。
【0039】
請求項11記載の搬送装置によれば、基板拘持部は、屈折構造の一方における腕部材の他方の回転角と、屈折構造の他方における腕部材の他方の回転角とを整合する整合構造を有するので、屈折構造の動作をさらに正確に同調させることができ、基板をさらに正確に所望の位置に搬送できる。
【0040】
請求項12記載の搬送装置は、請求項6乃至11のいずれか1項に記載の搬送装置において、前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記環状体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ前記筐体は前記他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有することを特徴とする。
【0041】
請求項12記載の搬送装置によれば、円柱体は中心軸方向に沿って穿孔された貫通孔を有し、環状体は貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ筐体は他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有するので、当該貫通孔、他の貫通孔及びさらに他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0042】
請求項13記載の搬送装置は、請求項6乃至12のいずれか1項に記載の搬送装置において、前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする。
【0043】
請求項13記載の搬送装置によれば、屈折構造の一方における腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0044】
【発明の実施の形態】
以下、本発明の第1の実施の形態に係る搬送装置について詳述する。
【0045】
図1は、本発明の第1の実施の形態に係る搬送装置が配設されたクラスタ基板処理システムの概略構成を示す平面図である。
【0046】
図1において、クラスタ基板処理システム10は、その内部において基板Wを処理する4つの基板処理装置11と、基板Wを格納するウエハカセット12から基板Wを搬出入するロードロック室13と、ロードロック室13から基板Wの搬入、又はロードロック室13への基板Wの搬出を行う2つのウエハ搬出入室14と、基板処理装置11及びウエハ搬出入室14を接続する搬送室15とを備える。また、クラスタ基板処理システム10は、搬送室15の内部において基板ハンドリング機構16を有する。基板ハンドリング機構16は、基板Wをウエハ搬出入室14や基板処理装置11へ搬出入する。
【0047】
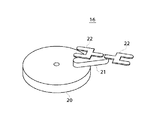
図2は、図1のクラスタ基板処理システム10における基板ハンドリング機構16の概略構成を示す斜視図である。
【0048】
図2において、基板ハンドリング機構16は、円柱体である回転部20、棒体であるアーム部21及び基板Wを拘持する拘持部22とから成り、回転部20は、クラスタ基板処理システム10を上方から見たときに、その中心部において回転自在に搬送室15の床面に接続され、アーム部21は、その一端において回転部20の外縁近傍と回転自在に接続され、拘持部22はアーム部21の他端に回転自在に接続される。また、回転部20の半径は、回転部20の中心部から回転部20に対するアーム部21の回転軸までの距離よりも大きい。そして、基板ハンドリング機構16において基板Wを搬送するとき、回転部20、アーム部21及び拘持部22が協動して基板Wを基板処理装置11やウエハ搬出入室14における所望の位置に搬出入する。
【0049】
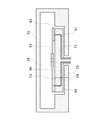
図3は、図2の基板ハンドリング機構16を内包する搬送室15の概略構成を示す断面図である。
【0050】
図3において、搬送室15は、その内部の上方にアーム部21及び拘持部22が回転移動可能な移動空間30を有し、該移動空間30は搬送室15の側壁部に配設された開口部31を介して基板処理装置11やウエハ搬出入室14の内部空間と接続される。また、搬送室15は、その内部の下方に回転部20を収容する収容空間32を有し、該収容空間32はクラスタ基板処理システム10の上下方向に沿った中心軸を有する円柱状の空間である。回転部20の直径は、収容空間32の直径より若干小さく設定されるので、回転部20の中心軸が収容空間32の中心軸と一致するように、回転部20が収容空間32に収容されたとき、回転部20は収容空間32の容積をほぼ充填する。このとき、回転部20は棒状部材でなく、円柱状部材であるため、その半径方向に関する撓み量が小さくなり、開口部31の面積の設定において当該撓み量を考慮する必要はない。
【0051】
また、回転部20は中心軸方向に沿って穿孔された排気ポート33を有し、搬送室15は、回転部20が回転する前のイニシャル状態にあるときにおいて排気ポート33に対応する位置に穿孔された排気ポート34を底部に有する。
【0052】
次に、基板ハンドリング機構16の基板搬送方法について図面を用いて説明する。
【0053】
図4は、図2の基板ハンドリング機構16が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【0054】
まず、基板Wを拘持した拘持部22のアーム部21に対する位置関係を固定し、且つアーム部21の回転部20に対する位置関係を固定したまま、回転部20をその中心軸回りに所定の角度だけ回転させることにより、拘持部22を、基板Wを搬入すべき基板処理装置11aに正対させる(図4(a))。
【0055】
そして、さらに回転部20を反時計回りに所定の回転速度で回転させるとき、アーム部21を時計回りに同じ所定の回転速度で回転させることによって、拘持部22を基板処理装置11aへ直線状に移動させ(図4(b))、基板処理装置11aの内部へ進入した拘持部22が所望の位置に到達したとき、回転部20及びアーム部21の回転を中止することによって基板Wを基板処理装置11aにおける所望の位置へ搬送する(図4(c))。
【0056】
図5は、図2の基板ハンドリング機構16が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【0057】
まず、図4の直線方向に関する搬送方法の手順を逆に実行することにより、基板処理装置11aにおいて処理の終了した基板Wを搬出し(図5(a))、その後、基板Wを拘持した拘持部22のアーム部21に対する位置関係を固定し、且つアーム部21の回転部20に対する位置関係を固定したまま、回転部20をその中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部22を、基板Wを搬入すべき基板処理装置11bに正対させる(図5(b))。
【0058】
そして、図4の直線方向に関する搬送方法の手順を実行することによって基板Wを基板処理装置11bにおける所望の位置に搬送する(図5(c))。
【0059】
本発明の第1の実施の形態によれば、回転部20は、中心部が搬送室15に回転自在に接続された円柱体から成り、回転部20の半径は、回転部20の中心部から回転部20に対するアーム部21の回転軸までの距離よりも大きく、回転部20が収容空間32に収容されたとき、回転部20は収容空間32の容積をほぼ充填するので、搬送室15内部の空間容積が小さくなり、回転部20の回転による気流の乱れの発生を防止できると共に、回転部20の剛性の向上によって半径方向に関する撓み量が小さくなり、搬送室15の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、搬送室15内部の空間容積が小さくなるため、搬送室15内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0060】
また、回転部20は中心軸方向に沿って穿孔された排気ポート33を有し、搬送室15は、回転部20が回転する前のイニシャル状態にあるとき、排気ポート33に対応する位置に穿孔された排気ポート34を底部に有するので、排気ポート33及び排気ポート34を介して搬送室15内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0061】
上述した基板ハンドリング機構16において、回転部20には、その中心軸に沿った円柱孔が穿孔されていてもよく、これにより、回転部20を軽量化でき、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。
【0062】
次に、本発明の第2の実施の形態に係る搬送装置について詳述する。
【0063】
本発明の第2の実施の形態に係る搬送装置も、上述した基板ハンドリング機構16と同様に、クラスタ基板処理システム10における搬送室15の内部に配設される。
【0064】
図6は、本発明の第2の実施の形態に係る搬送装置の概略構成を示す斜視図である。
【0065】
図6において、基板ハンドリング機構60は、円柱体である回転部61、板状体である延伸部62、及び棒状体である第1アーム部63から成る第1レッグ部64と、環状体である環状回転部65、及び棒状体である第2アーム部66から成る第2レッグ部67と、基板Wを拘持する拘持部68とを備える。
【0066】
回転部61は、クラスタ基板処理システム10を上方から見たときに、その中心部において回転自在に搬送室15の床面に接続され、環状回転部65は回転部61の中心軸に沿って配設される。第1レッグ部64において、延伸部62は、その一端において回転部61の外縁近傍に固定され、第1アーム部63は、その一端において延伸部62の他端と回転自在に接続される。また、第2レッグ部67において、環状回転部65は、回転部61の中心軸の廻りを回転自在に配設され、第2アーム部66は、その一端において環状回転部65に回転自在に接続される。さらに、拘持部68は、第1アーム部63及び第2アーム部66の各々と、その他端において接続される。
【0067】
また、回転部61の半径は、その中心部から延伸部62の他端までの距離よりも小さいが、第1レッグ部64における第1アーム部63の一端の回転軸から回転部61の中心部までの距離は、第2レッグ部67における第2アーム部66の一端の回転軸から環状回転部65の中心部までの距離と等しい。
【0068】
このハンドリング機構60において基板Wを搬送するとき、第1レッグ部64、第2レッグ部67、及び拘持部68が協動して基板Wを基板処理装置11やウエハ搬出入室14における所望の位置に搬出入する。
【0069】
図7は、図6の基板ハンドリング機構60を内包する搬送室15の概略構成を示す断面図である。
【0070】
図7において、搬送室15は、その内部の上方に第1アーム部63、第2アーム部66及び拘持部68が回転移動可能な移動空間70を有し、該移動空間70は搬送室15の側壁部に配設された開口部(不図示)を介して基板処理装置11やウエハ搬出入室14の内部空間と接続される。また、搬送室15は、その内部の下方に回転部61及び環状回転部65を収容する収容空間71を有し、該収容空間71はクラスタ基板処理システム10の上下方向に沿った中心軸を有する円柱状の空間である。環状回転部65の外径は、収容空間71の直径より若干小さく設定されるので、環状回転部65の中心軸が収容空間71の中心軸と一致するように、環状回転部65が収容空間71に収容され、且つ回転部61が環状回転部65に収容されたとき、回転部61及び環状回転部65は収容空間71の容積をほぼ充填する。このとき、回転部61は円柱状部材であり、環状回転部65は環状部材であるため、それらの半径方向に関する撓み量が小さくなり、上述した開口部の面積の設定において当該撓み量を考慮する必要はない。
【0071】
また、回転部61は中心軸方向に沿って穿孔された排気ポート72を有し、環状回転部65は、回転部61が回転する前のイニシャル状態にあるときにおいて排気ポート72に対応する位置に穿孔された排気ポート73を底部に有し、搬送室15は、環状回転部65が回転する前のイニシャル状態にあるときにおいて排気ポート73に対応する位置に穿孔された排気ポート74を底部に有する。
【0072】
次に、基板ハンドリング機構60の基板搬送方法について図面を用いて説明する。
【0073】
図8は、図7の基板ハンドリング機構60が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【0074】
まず、基板Wを拘持した拘持部68の第1アーム部63及び第2アーム部66に対する位置関係を固定し、第1アーム部63の回転部61に対する位置関係を固定し、さらに、第2アーム部66の環状回転部65に対する位置関係を固定したまま、回転部61及び環状回転部65を同調させて、それらの中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部68を、基板Wを搬入すべき基板処理装置11aに正対させる(図8(a))。
【0075】
そして、さらに環状回転部65を反時計回りに所定の回転速度で回転させるとき、第2アーム部66を時計回りに同じ所定の回転速度で回転させると共に、回転部61も時計回りに同じ所定の回転速度で回転させる。このとき、拘持部68は第1アーム部63の拘持部68に対する回転角と、第2アーム部66の拘持部68に対する回転角とを整合する後述の整合構造100を有するため、拘持部68は基板処理装置11aへ直線状に移動する(図8(b))。そして、基板処理装置11aの内部へ進入した拘持部68が所望の位置に到達したとき、環状回転部65、第2アーム部66及び回転部61の回転を中止することによって基板Wを基板処理装置11aにおける所望の位置へ搬送する(図8(c))。
【0076】
図9は、図7の基板ハンドリング機構60が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【0077】
まず、図8の直線方向に関する搬送方法の手順を逆に実行することにより、基板処理装置11aにおいて処理の終了した基板Wを搬出し(図9(a))、その後、基板Wを拘持した拘持部68の第1アーム部63及び第2アーム部66に対する位置関係を固定し、第1アーム部63の回転部61に対する位置関係を固定し、さらに、第2アーム部66の環状回転部65に対する位置関係を固定したまま、回転部61及び環状回転部65を同調させて、それらの中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部68を、基板Wを搬入すべき基板処理装置11bに正対させる(図9(b))。
【0078】
そして、図8の直線方向に関する搬送方法の手順を実行することによって基板Wを基板処理装置11bにおける所望の位置に搬送する(図9(c))。
【0079】
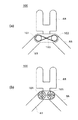
図10は、図6における拘持部68が有する第1アーム部63の回転角及び第2アーム部66の回転角を整合する整合構造100の概略構成を示す平面図である。
【0080】
図10(a)において、拘持部68は、第1アーム部63の他端に固定され、拘持部68に遊合される第1のギヤ101と、第2アーム部66の他端に固定され、拘持部68に遊合される第2のギヤ102と、第1のギヤ101及び第2のギヤ102にたすき掛け状に掛けられた駆動チェーン103とを備える。
【0081】
第2アーム部66の回転に応じて第2のギヤ102が所定の角度だけ回転するとき、当該所定の角度に対応した移動量だけ駆動チェーン103は移動し、当該移動量に対応して第1のギヤ101は回転する。このとき、第2のギヤ102と第1のギヤ101の有効径は同じであるので、第1のギヤ101は、第2のギヤ102と同じ所定の角度だけ回転する。これにより、拘持部68は第1アーム部63の回転角及び第2アーム部66の回転角を整合する。
【0082】
整合構造100の構成は上述したものに限られず、図10(b)に示すように、第1アーム部63の他端に固定され、拘持部68に遊合される円筒形磁石104と、第2アーム部66の他端に固定され、拘持部68に遊合される円筒形磁石105とを備えてもよく、このとき、円筒形磁石104及び円筒形磁石105の各々は、N極とS極が周方向に同じピッチで交互に配列され、円筒形磁石104における磁極と、当該極に対向する円筒形磁石105における磁極が反対極であるように配設される。
【0083】
ここで、第2アーム部66の回転に応じて円筒形磁石105が所定の角度だけ回転するとき、反対極同士の磁力によって円筒形磁石104は所定の角度だけ回転する。これにより、拘持部68は第1アーム部63の回転角及び第2アーム部66の回転角を整合する。
【0084】
本発明の第2の実施の形態によれば、第1レッグ部64における回転部61は、中心部が搬送室15に回転自在に接続された円柱体から成り、回転部61の半径は、その中心部から延伸部62の他端までの距離よりも小さく、且つ第2レッグ部67における環状回転部65は、回転部61の中心軸に沿って配設された環状体であり、環状回転部65が収容空間71に収容され、且つ回転部61が環状回転部65に収容されたとき、回転部61及び環状回転部65は収容空間71の容積をほぼ充填するので、搬送室15内部の空間容積が小さくなり、回転部61及び環状回転部65の回転による気流の乱れの発生を防止できると共に、回転部61及び環状回転部65における剛性の向上によって撓み量が小さくなり、搬送室15の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、搬送室15内部の空間容積が小さくなるため、搬送室15内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0085】
また、第1レッグ部64における第1アーム部63の一端の回転軸から回転部61の中心部までの距離は、第2レッグ部67における第2アーム部66の一端の回転軸から環状回転部65の中心部までの距離と等しいので、回転部61と環状回転部65の回転角度を揃えれば、第1レッグ部64及び第2レッグ部67の動作を同調させることができ、基板Wを正確に所望の位置に搬送できる。
【0086】
さらに、第1レッグ部64及び第2レッグ部67の各々を、第1アーム部63及び第2アーム部66の他端において互いに接続する拘持部68を備えるので、第1レッグ部64及び第2レッグ部67の動作をより正確に同調させることができ、基板Wをより正確に所望の位置に搬送できる。
【0087】
拘持部68は、第1アーム部63の他端に固定され、拘持部68に遊合される第1のギヤ101と、第2アーム部66の他端に固定され、拘持部68に遊合される第2のギヤ102と、第1のギヤ101及び第2のギヤ102にたすき掛け状に掛けられた駆動チェーン103とを備える整合構造100を有するので、第1レッグ部64及び第2レッグ部67の動作をさらに正確に同調させることができ、基板Wをさらに正確に所望の位置に搬送できる。
【0088】
また、回転部61は中心軸方向に沿って穿孔された排気ポート72を有し、環状回転部65は、回転部61が回転する前のイニシャル状態にあるときにおいて排気ポート72に対応する位置に穿孔された排気ポート73を底部に有し、搬送室15は、環状回転部65が回転する前のイニシャル状態にあるときにおいて排気ポート73に対応する位置に穿孔された排気ポート74を底部に有するので、排気ポート72、排気ポート73及び排気ポート74を介して搬送室15内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0089】
上述した基板ハンドリング機構60において、回転部61には、その中心軸に沿った円柱孔が穿孔されていてもよく、これにより、回転部61を軽量化でき、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。
【0090】
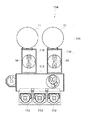
上述した基板ハンドリング機構16や基板ハンドリング機構60を使用する基板処理システムは、クラスタ基板処理システム10に限られず、例えば、図11に示すような基板処理装置11及び該基板処理装置11に基板Wを受け渡しするロードロック室110から構成される2つのプロセスモジュール111と、3つのウエハカセット112と、矩形状の共通搬送路であるトランスファチャンバ113とを備え、2つのプロセスモジュール111が互いに平行に配設され、2つのプロセスモジュール111の各々はロードロック室110を介して接続する基板処理システム114であってもよく、この基板処理システム114では、ロードロック室110の各々が基板ハンドリング機構16等をその内部に有する。
【0091】
また、上述した基板ハンドリング機構16の各構成部品や基板ハンドリング機構60の各構成部品の材料は、アルミ合金であってもよく、これにより、基板ハンドリング機構16及び基板ハンドリング機構60の重量を削減することができ、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。さらに、アルミ合金が有する耐腐食性により、基板ハンドリング機構16及び基板ハンドリング機構60のメンテナンスサイクル、ひいてはクラスタ基板処理システム10のメンテナンスサイクルを長期化できる。
【0092】
【発明の効果】
以上詳細に説明したように、請求項1記載の搬送装置によれば、少なくとも2つの腕部材を備えると共に筐体内部に配設された基板の搬送装置において、腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から一端までの距離よりも大きいので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体における腕部材用の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0093】
請求項2記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0094】
請求項3記載の搬送装置によれば、腕部材収容孔の直径は、円柱体の直径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0095】
請求項4記載の搬送装置によれば、腕部材の一方である円柱体は中心軸方向に沿って穿孔された貫通孔を有し、筐体は貫通孔に対応する位置に穿孔された他の貫通孔を有するので、当該貫通孔及び他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0096】
請求項5記載の搬送装置によれば、腕部材の一方である円柱体にはその中心軸に沿った円柱孔が穿孔されているので、腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0097】
請求項6記載の搬送装置によれば、少なくとも2つの腕部材から成る2つの屈折構造を備えると共に筐体内部に配設された基板の搬送装置では、屈折構造の一方における腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から腕部材の他方の一端までの距離よりも小さく、且つ屈折構造の他方における腕部材の一方は、円柱体の中心軸に沿って配設された環状体であるので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0098】
請求項7記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0099】
請求項8記載の搬送装置によれば、腕部材収容孔の直径は、環状体の外径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0100】
請求項9記載の搬送装置によれば、屈折構造の一方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離は、屈折構造の他方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離と等しいので、円柱体と環状体の回転角度を揃えれば、屈折構造の動作を同調させることができ、基板を正確に所望の位置に搬送できる。
【0101】
請求項10記載の搬送装置によれば、屈折構造の各々を、腕部材の他方の他端において互いに接続する基板拘持部を備えるので、屈折構造の動作をより正確に同調させることができ、基板をより正確に所望の位置に搬送できる。
【0102】
請求項11記載の搬送装置によれば、基板拘持部は、屈折構造の一方における腕部材の他方の回転角と、屈折構造の他方における腕部材の他方の回転角とを整合する整合構造を有するので、屈折構造の動作をさらに正確に同調させることができ、基板をさらに正確に所望の位置に搬送できる。
【0103】
請求項12記載の搬送装置によれば、円柱体は中心軸方向に沿って穿孔された貫通孔を有し、環状体は貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ筐体は他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有するので、当該貫通孔、他の貫通孔及びさらに他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0104】
請求項13記載の搬送装置によれば、屈折構造の一方における腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態に係る搬送装置が配設されたクラスタ基板処理システムの概略構成を示す平面図である。
【図2】図1のクラスタ基板処理システム10における基板ハンドリング機構16の概略構成を示す斜視図である。
【図3】図2の基板ハンドリング機構16を内包する搬送室15の概略構成を示す断面図である。
【図4】図2の基板ハンドリング機構16が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【図5】図2の基板ハンドリング機構16が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【図6】本発明の第2の実施の形態に係る搬送装置の概略構成を示す斜視図である。
【図7】図6の基板ハンドリング機構60を内包する搬送室15の概略構成を示す断面図である。
【図8】図7の基板ハンドリング機構60が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【図9】図7の基板ハンドリング機構60が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【図10】図6における拘持部68が有する第1アーム部63の回転角及び第2アーム部66の回転角を整合する整合構造100の概略構成を示す平面図である。
【図11】基板ハンドリング機構16を使用する他の基板処理システム114の概略構成を示す平面図である。
【図12】スカラアーム式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【図13】図12におけるスカラアーム式ハンドリング機構125の概略構成を示す斜視図である。
【図14】フロッグレッグ式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【図15】図13のスカラアーム式ハンドリング機構125を内包する搬送室124の概略構成を示す断面図である。
【符号の説明】
10 クラスタ基板処理システム
11 基板処理装置
14 ウエハ搬出入室
15 搬送室
16,60 基板ハンドリング機構
20,61 回転部
21 アーム部
22 拘持部
31 開口部
32,71 収容空間
63 第1アーム部
64 第1レッグ部
65 環状回転部
66 第2アーム部
67 第2レッグ部
68 拘持部
33,34,72,73,74 排気ポート
100 整合構造
【産業上の利用分野】
本発明は、基板の搬送装置、特に半導体ウエハ等の基板の搬送装置に関する。
【0002】
【従来の技術】
従来、イオンドープ、成膜、エッチング等の各種処理を半導体ウエハ等の基板Wに施す基板処理システムとして、スループット及び歩留まりの向上を目的とし、同じ処理を行う複数の基板処理装置や、異なる処理を行う複数の基板処理装置が共通の搬送室を介して放射状に配設されたクラスタ基板処理システムが知られている。
【0003】
このクラスタ基板処理システムでは、各基板処理装置において処理済の基板Wと未処理の基板Wとを入れ換えるため、基板Wを搬送する搬送機構が搬送室に配設される。このような搬送機構の代表例としては、下記に示すスカラアーム式ハンドリング機構及びフロッグレッグ式ハンドリング機構が知られている(例えば、特許文献1参照。)。
【0004】
図12は、スカラアーム式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【0005】
図12において、クラスタ基板処理システム120は、その内部において基板Wを処理する2つの基板処理装置121と、ウエハカセット(不図示)から基板Wを搬出入するロードロック室122と、ロードロック室122から基板Wの搬入、又はロードロック室122への基板Wの搬出を行う2つのウエハ搬出入室123と、基板処理装置121及びウエハ搬出入室123を接続する搬送室124とを備え、搬送室124はその内部にスカラアーム式ハンドリング機構125を有する。
【0006】
スカラアーム式ハンドリング機構125は、図13に示すように、棒状の第1アーム部130、棒状の第2アーム部131及び基板Wを拘持する拘持部132とから成り、第1アーム部130は、その一端においてクラスタ基板処理システム120を上方から見たときに回転自在となるように、搬送室124の床面に接続され、第2アーム部131は、その一端において第1アーム部130の他端に回転自在に接続され、拘持部132は、第2アーム部131の他端に接続される。
【0007】
スカラアーム式ハンドリング機構125において基板Wを搬送するとき、第1アーム部130、第2アーム部131及び拘持部132が協動して基板Wを基板処理装置121やウエハ搬出入室123における所望の位置に搬出入する。
【0008】
図14は、フロッグレッグ式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【0009】
図14において、クラスタ基板処理システム140は、その内部において基板Wを処理する4つの基板処理装置141と、ロードロック室(不図示)から基板Wの搬入、又はロードロック室への基板Wの搬出を行う2つのウエハ搬出入室142と、基板処理装置141及びウエハ搬出入室142を接続する搬送室143とを備え、搬送室143はその内部にフロッグレッグ式ハンドリング機構144を有する。
【0010】
フロッグレッグ式ハンドリング機構144は、搬送室143の床面に垂直に立設された柱状の基部145と、平行に配設された2本の棒状部材からなる第1アーム部146及び棒状の第2アーム部147が構成する2つのフロッグレッグ部148と、基板Wを拘持する拘持部149とから成り、第1アーム部146は、その一端において基部145の側面に周方向に関して移動自在に接続され、第2アーム部147は、その一端において第1アーム部146の他端に回転自在に接続され、拘持部149は、第2アーム部147の他端に接続される。
【0011】
フロッグレッグ式ハンドリング機構144において基板Wを搬送するとき、第1アーム部146、第2アーム部147及び拘持部149が協動して基板Wを基板処理装置141やウエハ搬出入室142における所望の位置に搬出入する。
【0012】
【特許文献1】
特開平10−154739号公報(第1図、第3図)
【0013】
【発明が解決しようとする課題】
しかしながら、図15に示すように、クラスタ基板処理システム120における搬送室124内部において、第1アーム部130が回転移動する空間150には干渉物となるものを配設することができず、搬送室124内部の空間容積が大となる傾向がある。また、基板Wの基板処理装置121への搬入の際、基板処理装置121内部の真空度を維持するために、搬送室124内部は減圧されるが、搬送室124内部を完全に真空にすることは困難であり、多少の気体が残留する。
【0014】
このとき、上述したように搬送室124内部の空間容積が大となると、第1アーム部130が回転移動することによって空間150において気流の乱れが発生してパーティクル等が巻上げられ、該巻き上げられたパーティクル等が基板Wに付着するという問題があった。
【0015】
また、第1アーム部130は棒状であるため、長手方向において撓み量が大となる傾向がある。このように撓み量が大となると、第2アーム部131や拘持部132の位置精度が悪化し、基板Wの搬送時に搬送室124の筐体と干渉するおそれがあるため、搬送室124の開口部151の面積を大きくする必要があるが、開口部151の開口部の面積を大きくすると外部からのパーティクル等の侵入が容易となり、その結果、侵入したパーティクル等が基板Wに付着するという問題があった。
【0016】
これらの問題はフロッグレッグ式ハンドリング機構144が配設されたクラスタ基板処理システム140でも同様に発生する。
【0017】
本発明の目的は、パーティクル等の基板への付着を防止できる搬送装置を提供することにある。
【0018】
【課題を解決するための手段】
上記目的を達成するために、請求項1記載の基板の搬送装置は、基板を支持する少なくとも2つの腕部材を備えると共に所定の筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方に回転自在に接続される基板の搬送装置において、前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記一端までの距離よりも大きいことを特徴とする。
【0019】
請求項1記載の搬送装置によれば、少なくとも2つの腕部材を備えると共に筐体内部に配設された基板の搬送装置において、腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から一端までの距離よりも大きいので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体における腕部材用の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0020】
請求項2記載の搬送装置は、請求項1記載の搬送装置において、前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容することを特徴とする。
【0021】
請求項2記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0022】
請求項3記載の搬送装置は、請求項2記載の搬送装置において、前記腕部材収容孔の直径は、前記円柱体の直径とほぼ一致することを特徴とする。
【0023】
請求項3記載の搬送装置によれば、腕部材収容孔の直径は、円柱体の直径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0024】
請求項4記載の搬送装置は、請求項1乃至3のいずれか1項に記載の搬送装置において、前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記筐体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有することを特徴とする。
【0025】
請求項4記載の搬送装置によれば、腕部材の一方である円柱体は中心軸方向に沿って穿孔された貫通孔を有し、筐体は貫通孔に対応する位置に穿孔された他の貫通孔を有するので、当該貫通孔及び他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0026】
請求項5記載の搬送装置は、請求項1乃至4のいずれか1項に記載の搬送装置において、前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする。
【0027】
請求項5記載の搬送装置によれば、腕部材の一方である円柱体にはその中心軸に沿った円柱孔が穿孔されているので、腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0028】
上記目的を達成するために、請求項6記載の搬送装置は、基板を支持する少なくとも2つの腕部材を備えると共に筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方の一端と回転自在に接続される屈折構造を少なくとも2つ備える基板の搬送装置において、前記屈折構造の一方における前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記腕部材の他方の一端までの距離よりも小さく、且つ前記屈折構造の他方における前記腕部材の一方は、前記円柱体の中心軸に沿って配設された環状体であることを特徴とする。
【0029】
請求項6記載の搬送装置によれば、少なくとも2つの腕部材から成る2つの屈折構造を備えると共に筐体内部に配設された基板の搬送装置では、屈折構造の一方における腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から腕部材の他方の一端までの距離よりも小さく、且つ屈折構造の他方における腕部材の一方は、円柱体の中心軸に沿って配設された環状体であるので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0030】
請求項7記載の搬送装置は、請求項6記載の搬送装置において、前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容することを特徴とする。
【0031】
請求項7記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0032】
請求項8記載の搬送装置は、請求項7記載の搬送装置において、前記腕部材収容孔の直径は、前記環状体の外径とほぼ一致することを特徴とする。
【0033】
請求項8記載の搬送装置によれば、腕部材収容孔の直径は、環状体の外径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0034】
請求項9記載の搬送装置は、請求項6乃至8のいずれか1項に記載の搬送装置において、前記屈折構造の一方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離は、前記屈折構造の他方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離と等しいことを特徴とする。
【0035】
請求項9記載の搬送装置によれば、屈折構造の一方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離は、屈折構造の他方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離と等しいので、円柱体と環状体の回転角度を揃えれば、屈折構造の動作を同調させることができ、基板を正確に所望の位置に搬送できる。
【0036】
請求項10記載の搬送装置は、請求項6乃至9のいずれか1項に記載の搬送装置において、前記屈折構造の各々を、前記腕部材の他方の他端において互いに接続する基板拘持部を備えることを特徴とする。
【0037】
請求項10記載の搬送装置によれば、屈折構造の各々を、腕部材の他方の他端において互いに接続する基板拘持部を備えるので、屈折構造の動作をより正確に同調させることができ、基板をより正確に所望の位置に搬送できる。
【0038】
請求項11記載の搬送装置は、請求項10記載の搬送装置において、前記基板拘持部は、前記屈折構造の一方における前記腕部材の他方の回転角と、前記屈折構造の他方における前記腕部材の他方の回転角とを整合する整合構造を有することを特徴とする。
【0039】
請求項11記載の搬送装置によれば、基板拘持部は、屈折構造の一方における腕部材の他方の回転角と、屈折構造の他方における腕部材の他方の回転角とを整合する整合構造を有するので、屈折構造の動作をさらに正確に同調させることができ、基板をさらに正確に所望の位置に搬送できる。
【0040】
請求項12記載の搬送装置は、請求項6乃至11のいずれか1項に記載の搬送装置において、前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記環状体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ前記筐体は前記他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有することを特徴とする。
【0041】
請求項12記載の搬送装置によれば、円柱体は中心軸方向に沿って穿孔された貫通孔を有し、環状体は貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ筐体は他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有するので、当該貫通孔、他の貫通孔及びさらに他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0042】
請求項13記載の搬送装置は、請求項6乃至12のいずれか1項に記載の搬送装置において、前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする。
【0043】
請求項13記載の搬送装置によれば、屈折構造の一方における腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0044】
【発明の実施の形態】
以下、本発明の第1の実施の形態に係る搬送装置について詳述する。
【0045】
図1は、本発明の第1の実施の形態に係る搬送装置が配設されたクラスタ基板処理システムの概略構成を示す平面図である。
【0046】
図1において、クラスタ基板処理システム10は、その内部において基板Wを処理する4つの基板処理装置11と、基板Wを格納するウエハカセット12から基板Wを搬出入するロードロック室13と、ロードロック室13から基板Wの搬入、又はロードロック室13への基板Wの搬出を行う2つのウエハ搬出入室14と、基板処理装置11及びウエハ搬出入室14を接続する搬送室15とを備える。また、クラスタ基板処理システム10は、搬送室15の内部において基板ハンドリング機構16を有する。基板ハンドリング機構16は、基板Wをウエハ搬出入室14や基板処理装置11へ搬出入する。
【0047】
図2は、図1のクラスタ基板処理システム10における基板ハンドリング機構16の概略構成を示す斜視図である。
【0048】
図2において、基板ハンドリング機構16は、円柱体である回転部20、棒体であるアーム部21及び基板Wを拘持する拘持部22とから成り、回転部20は、クラスタ基板処理システム10を上方から見たときに、その中心部において回転自在に搬送室15の床面に接続され、アーム部21は、その一端において回転部20の外縁近傍と回転自在に接続され、拘持部22はアーム部21の他端に回転自在に接続される。また、回転部20の半径は、回転部20の中心部から回転部20に対するアーム部21の回転軸までの距離よりも大きい。そして、基板ハンドリング機構16において基板Wを搬送するとき、回転部20、アーム部21及び拘持部22が協動して基板Wを基板処理装置11やウエハ搬出入室14における所望の位置に搬出入する。
【0049】
図3は、図2の基板ハンドリング機構16を内包する搬送室15の概略構成を示す断面図である。
【0050】
図3において、搬送室15は、その内部の上方にアーム部21及び拘持部22が回転移動可能な移動空間30を有し、該移動空間30は搬送室15の側壁部に配設された開口部31を介して基板処理装置11やウエハ搬出入室14の内部空間と接続される。また、搬送室15は、その内部の下方に回転部20を収容する収容空間32を有し、該収容空間32はクラスタ基板処理システム10の上下方向に沿った中心軸を有する円柱状の空間である。回転部20の直径は、収容空間32の直径より若干小さく設定されるので、回転部20の中心軸が収容空間32の中心軸と一致するように、回転部20が収容空間32に収容されたとき、回転部20は収容空間32の容積をほぼ充填する。このとき、回転部20は棒状部材でなく、円柱状部材であるため、その半径方向に関する撓み量が小さくなり、開口部31の面積の設定において当該撓み量を考慮する必要はない。
【0051】
また、回転部20は中心軸方向に沿って穿孔された排気ポート33を有し、搬送室15は、回転部20が回転する前のイニシャル状態にあるときにおいて排気ポート33に対応する位置に穿孔された排気ポート34を底部に有する。
【0052】
次に、基板ハンドリング機構16の基板搬送方法について図面を用いて説明する。
【0053】
図4は、図2の基板ハンドリング機構16が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【0054】
まず、基板Wを拘持した拘持部22のアーム部21に対する位置関係を固定し、且つアーム部21の回転部20に対する位置関係を固定したまま、回転部20をその中心軸回りに所定の角度だけ回転させることにより、拘持部22を、基板Wを搬入すべき基板処理装置11aに正対させる(図4(a))。
【0055】
そして、さらに回転部20を反時計回りに所定の回転速度で回転させるとき、アーム部21を時計回りに同じ所定の回転速度で回転させることによって、拘持部22を基板処理装置11aへ直線状に移動させ(図4(b))、基板処理装置11aの内部へ進入した拘持部22が所望の位置に到達したとき、回転部20及びアーム部21の回転を中止することによって基板Wを基板処理装置11aにおける所望の位置へ搬送する(図4(c))。
【0056】
図5は、図2の基板ハンドリング機構16が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【0057】
まず、図4の直線方向に関する搬送方法の手順を逆に実行することにより、基板処理装置11aにおいて処理の終了した基板Wを搬出し(図5(a))、その後、基板Wを拘持した拘持部22のアーム部21に対する位置関係を固定し、且つアーム部21の回転部20に対する位置関係を固定したまま、回転部20をその中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部22を、基板Wを搬入すべき基板処理装置11bに正対させる(図5(b))。
【0058】
そして、図4の直線方向に関する搬送方法の手順を実行することによって基板Wを基板処理装置11bにおける所望の位置に搬送する(図5(c))。
【0059】
本発明の第1の実施の形態によれば、回転部20は、中心部が搬送室15に回転自在に接続された円柱体から成り、回転部20の半径は、回転部20の中心部から回転部20に対するアーム部21の回転軸までの距離よりも大きく、回転部20が収容空間32に収容されたとき、回転部20は収容空間32の容積をほぼ充填するので、搬送室15内部の空間容積が小さくなり、回転部20の回転による気流の乱れの発生を防止できると共に、回転部20の剛性の向上によって半径方向に関する撓み量が小さくなり、搬送室15の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、搬送室15内部の空間容積が小さくなるため、搬送室15内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0060】
また、回転部20は中心軸方向に沿って穿孔された排気ポート33を有し、搬送室15は、回転部20が回転する前のイニシャル状態にあるとき、排気ポート33に対応する位置に穿孔された排気ポート34を底部に有するので、排気ポート33及び排気ポート34を介して搬送室15内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0061】
上述した基板ハンドリング機構16において、回転部20には、その中心軸に沿った円柱孔が穿孔されていてもよく、これにより、回転部20を軽量化でき、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。
【0062】
次に、本発明の第2の実施の形態に係る搬送装置について詳述する。
【0063】
本発明の第2の実施の形態に係る搬送装置も、上述した基板ハンドリング機構16と同様に、クラスタ基板処理システム10における搬送室15の内部に配設される。
【0064】
図6は、本発明の第2の実施の形態に係る搬送装置の概略構成を示す斜視図である。
【0065】
図6において、基板ハンドリング機構60は、円柱体である回転部61、板状体である延伸部62、及び棒状体である第1アーム部63から成る第1レッグ部64と、環状体である環状回転部65、及び棒状体である第2アーム部66から成る第2レッグ部67と、基板Wを拘持する拘持部68とを備える。
【0066】
回転部61は、クラスタ基板処理システム10を上方から見たときに、その中心部において回転自在に搬送室15の床面に接続され、環状回転部65は回転部61の中心軸に沿って配設される。第1レッグ部64において、延伸部62は、その一端において回転部61の外縁近傍に固定され、第1アーム部63は、その一端において延伸部62の他端と回転自在に接続される。また、第2レッグ部67において、環状回転部65は、回転部61の中心軸の廻りを回転自在に配設され、第2アーム部66は、その一端において環状回転部65に回転自在に接続される。さらに、拘持部68は、第1アーム部63及び第2アーム部66の各々と、その他端において接続される。
【0067】
また、回転部61の半径は、その中心部から延伸部62の他端までの距離よりも小さいが、第1レッグ部64における第1アーム部63の一端の回転軸から回転部61の中心部までの距離は、第2レッグ部67における第2アーム部66の一端の回転軸から環状回転部65の中心部までの距離と等しい。
【0068】
このハンドリング機構60において基板Wを搬送するとき、第1レッグ部64、第2レッグ部67、及び拘持部68が協動して基板Wを基板処理装置11やウエハ搬出入室14における所望の位置に搬出入する。
【0069】
図7は、図6の基板ハンドリング機構60を内包する搬送室15の概略構成を示す断面図である。
【0070】
図7において、搬送室15は、その内部の上方に第1アーム部63、第2アーム部66及び拘持部68が回転移動可能な移動空間70を有し、該移動空間70は搬送室15の側壁部に配設された開口部(不図示)を介して基板処理装置11やウエハ搬出入室14の内部空間と接続される。また、搬送室15は、その内部の下方に回転部61及び環状回転部65を収容する収容空間71を有し、該収容空間71はクラスタ基板処理システム10の上下方向に沿った中心軸を有する円柱状の空間である。環状回転部65の外径は、収容空間71の直径より若干小さく設定されるので、環状回転部65の中心軸が収容空間71の中心軸と一致するように、環状回転部65が収容空間71に収容され、且つ回転部61が環状回転部65に収容されたとき、回転部61及び環状回転部65は収容空間71の容積をほぼ充填する。このとき、回転部61は円柱状部材であり、環状回転部65は環状部材であるため、それらの半径方向に関する撓み量が小さくなり、上述した開口部の面積の設定において当該撓み量を考慮する必要はない。
【0071】
また、回転部61は中心軸方向に沿って穿孔された排気ポート72を有し、環状回転部65は、回転部61が回転する前のイニシャル状態にあるときにおいて排気ポート72に対応する位置に穿孔された排気ポート73を底部に有し、搬送室15は、環状回転部65が回転する前のイニシャル状態にあるときにおいて排気ポート73に対応する位置に穿孔された排気ポート74を底部に有する。
【0072】
次に、基板ハンドリング機構60の基板搬送方法について図面を用いて説明する。
【0073】
図8は、図7の基板ハンドリング機構60が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【0074】
まず、基板Wを拘持した拘持部68の第1アーム部63及び第2アーム部66に対する位置関係を固定し、第1アーム部63の回転部61に対する位置関係を固定し、さらに、第2アーム部66の環状回転部65に対する位置関係を固定したまま、回転部61及び環状回転部65を同調させて、それらの中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部68を、基板Wを搬入すべき基板処理装置11aに正対させる(図8(a))。
【0075】
そして、さらに環状回転部65を反時計回りに所定の回転速度で回転させるとき、第2アーム部66を時計回りに同じ所定の回転速度で回転させると共に、回転部61も時計回りに同じ所定の回転速度で回転させる。このとき、拘持部68は第1アーム部63の拘持部68に対する回転角と、第2アーム部66の拘持部68に対する回転角とを整合する後述の整合構造100を有するため、拘持部68は基板処理装置11aへ直線状に移動する(図8(b))。そして、基板処理装置11aの内部へ進入した拘持部68が所望の位置に到達したとき、環状回転部65、第2アーム部66及び回転部61の回転を中止することによって基板Wを基板処理装置11aにおける所望の位置へ搬送する(図8(c))。
【0076】
図9は、図7の基板ハンドリング機構60が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【0077】
まず、図8の直線方向に関する搬送方法の手順を逆に実行することにより、基板処理装置11aにおいて処理の終了した基板Wを搬出し(図9(a))、その後、基板Wを拘持した拘持部68の第1アーム部63及び第2アーム部66に対する位置関係を固定し、第1アーム部63の回転部61に対する位置関係を固定し、さらに、第2アーム部66の環状回転部65に対する位置関係を固定したまま、回転部61及び環状回転部65を同調させて、それらの中心軸回りに所定の角度だけ回転させることにより、基板Wを拘持した拘持部68を、基板Wを搬入すべき基板処理装置11bに正対させる(図9(b))。
【0078】
そして、図8の直線方向に関する搬送方法の手順を実行することによって基板Wを基板処理装置11bにおける所望の位置に搬送する(図9(c))。
【0079】
図10は、図6における拘持部68が有する第1アーム部63の回転角及び第2アーム部66の回転角を整合する整合構造100の概略構成を示す平面図である。
【0080】
図10(a)において、拘持部68は、第1アーム部63の他端に固定され、拘持部68に遊合される第1のギヤ101と、第2アーム部66の他端に固定され、拘持部68に遊合される第2のギヤ102と、第1のギヤ101及び第2のギヤ102にたすき掛け状に掛けられた駆動チェーン103とを備える。
【0081】
第2アーム部66の回転に応じて第2のギヤ102が所定の角度だけ回転するとき、当該所定の角度に対応した移動量だけ駆動チェーン103は移動し、当該移動量に対応して第1のギヤ101は回転する。このとき、第2のギヤ102と第1のギヤ101の有効径は同じであるので、第1のギヤ101は、第2のギヤ102と同じ所定の角度だけ回転する。これにより、拘持部68は第1アーム部63の回転角及び第2アーム部66の回転角を整合する。
【0082】
整合構造100の構成は上述したものに限られず、図10(b)に示すように、第1アーム部63の他端に固定され、拘持部68に遊合される円筒形磁石104と、第2アーム部66の他端に固定され、拘持部68に遊合される円筒形磁石105とを備えてもよく、このとき、円筒形磁石104及び円筒形磁石105の各々は、N極とS極が周方向に同じピッチで交互に配列され、円筒形磁石104における磁極と、当該極に対向する円筒形磁石105における磁極が反対極であるように配設される。
【0083】
ここで、第2アーム部66の回転に応じて円筒形磁石105が所定の角度だけ回転するとき、反対極同士の磁力によって円筒形磁石104は所定の角度だけ回転する。これにより、拘持部68は第1アーム部63の回転角及び第2アーム部66の回転角を整合する。
【0084】
本発明の第2の実施の形態によれば、第1レッグ部64における回転部61は、中心部が搬送室15に回転自在に接続された円柱体から成り、回転部61の半径は、その中心部から延伸部62の他端までの距離よりも小さく、且つ第2レッグ部67における環状回転部65は、回転部61の中心軸に沿って配設された環状体であり、環状回転部65が収容空間71に収容され、且つ回転部61が環状回転部65に収容されたとき、回転部61及び環状回転部65は収容空間71の容積をほぼ充填するので、搬送室15内部の空間容積が小さくなり、回転部61及び環状回転部65の回転による気流の乱れの発生を防止できると共に、回転部61及び環状回転部65における剛性の向上によって撓み量が小さくなり、搬送室15の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、搬送室15内部の空間容積が小さくなるため、搬送室15内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0085】
また、第1レッグ部64における第1アーム部63の一端の回転軸から回転部61の中心部までの距離は、第2レッグ部67における第2アーム部66の一端の回転軸から環状回転部65の中心部までの距離と等しいので、回転部61と環状回転部65の回転角度を揃えれば、第1レッグ部64及び第2レッグ部67の動作を同調させることができ、基板Wを正確に所望の位置に搬送できる。
【0086】
さらに、第1レッグ部64及び第2レッグ部67の各々を、第1アーム部63及び第2アーム部66の他端において互いに接続する拘持部68を備えるので、第1レッグ部64及び第2レッグ部67の動作をより正確に同調させることができ、基板Wをより正確に所望の位置に搬送できる。
【0087】
拘持部68は、第1アーム部63の他端に固定され、拘持部68に遊合される第1のギヤ101と、第2アーム部66の他端に固定され、拘持部68に遊合される第2のギヤ102と、第1のギヤ101及び第2のギヤ102にたすき掛け状に掛けられた駆動チェーン103とを備える整合構造100を有するので、第1レッグ部64及び第2レッグ部67の動作をさらに正確に同調させることができ、基板Wをさらに正確に所望の位置に搬送できる。
【0088】
また、回転部61は中心軸方向に沿って穿孔された排気ポート72を有し、環状回転部65は、回転部61が回転する前のイニシャル状態にあるときにおいて排気ポート72に対応する位置に穿孔された排気ポート73を底部に有し、搬送室15は、環状回転部65が回転する前のイニシャル状態にあるときにおいて排気ポート73に対応する位置に穿孔された排気ポート74を底部に有するので、排気ポート72、排気ポート73及び排気ポート74を介して搬送室15内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0089】
上述した基板ハンドリング機構60において、回転部61には、その中心軸に沿った円柱孔が穿孔されていてもよく、これにより、回転部61を軽量化でき、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。
【0090】
上述した基板ハンドリング機構16や基板ハンドリング機構60を使用する基板処理システムは、クラスタ基板処理システム10に限られず、例えば、図11に示すような基板処理装置11及び該基板処理装置11に基板Wを受け渡しするロードロック室110から構成される2つのプロセスモジュール111と、3つのウエハカセット112と、矩形状の共通搬送路であるトランスファチャンバ113とを備え、2つのプロセスモジュール111が互いに平行に配設され、2つのプロセスモジュール111の各々はロードロック室110を介して接続する基板処理システム114であってもよく、この基板処理システム114では、ロードロック室110の各々が基板ハンドリング機構16等をその内部に有する。
【0091】
また、上述した基板ハンドリング機構16の各構成部品や基板ハンドリング機構60の各構成部品の材料は、アルミ合金であってもよく、これにより、基板ハンドリング機構16及び基板ハンドリング機構60の重量を削減することができ、もって慣性モーメントを低減できる。その結果、基板Wの搬送速度を向上でき、よりスループットを向上できる。さらに、アルミ合金が有する耐腐食性により、基板ハンドリング機構16及び基板ハンドリング機構60のメンテナンスサイクル、ひいてはクラスタ基板処理システム10のメンテナンスサイクルを長期化できる。
【0092】
【発明の効果】
以上詳細に説明したように、請求項1記載の搬送装置によれば、少なくとも2つの腕部材を備えると共に筐体内部に配設された基板の搬送装置において、腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から一端までの距離よりも大きいので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体における腕部材用の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0093】
請求項2記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0094】
請求項3記載の搬送装置によれば、腕部材収容孔の直径は、円柱体の直径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0095】
請求項4記載の搬送装置によれば、腕部材の一方である円柱体は中心軸方向に沿って穿孔された貫通孔を有し、筐体は貫通孔に対応する位置に穿孔された他の貫通孔を有するので、当該貫通孔及び他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0096】
請求項5記載の搬送装置によれば、腕部材の一方である円柱体にはその中心軸に沿った円柱孔が穿孔されているので、腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【0097】
請求項6記載の搬送装置によれば、少なくとも2つの腕部材から成る2つの屈折構造を備えると共に筐体内部に配設された基板の搬送装置では、屈折構造の一方における腕部材の一方は、中心部が筐体に回転自在に接続された円柱体から成り、円柱体の半径は中心部から腕部材の他方の一端までの距離よりも小さく、且つ屈折構造の他方における腕部材の一方は、円柱体の中心軸に沿って配設された環状体であるので、筐体内部の空間容積が小さくなり、腕部材の一方の回転による気流の乱れの発生を防止できると共に、腕部材の一方における剛性の向上によって撓み量が小さくなり、筐体の開口部の面積を小さくできる。その結果、パーティクル等の巻き上げや進入を防止でき、もってパーティクル等の基板への付着を防止できる。また、筐体内部の空間容積が小さくなるため、筐体内部の真空化を迅速に実行することができ、もってスループットを向上できる。
【0098】
請求項7記載の搬送装置によれば、筐体は円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容するので、筐体内部の空間容積がより小さくなり、もってパーティクル等の基板への付着を確実に防止できる。
【0099】
請求項8記載の搬送装置によれば、腕部材収容孔の直径は、環状体の外径とほぼ一致するので、筐体内部の空間容積がさらに小さくなり、もってパーティクル等の基板への付着をより確実に防止できる。
【0100】
請求項9記載の搬送装置によれば、屈折構造の一方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離は、屈折構造の他方の腕部材の一方における腕部材の他方に対する回転軸から中心部までの距離と等しいので、円柱体と環状体の回転角度を揃えれば、屈折構造の動作を同調させることができ、基板を正確に所望の位置に搬送できる。
【0101】
請求項10記載の搬送装置によれば、屈折構造の各々を、腕部材の他方の他端において互いに接続する基板拘持部を備えるので、屈折構造の動作をより正確に同調させることができ、基板をより正確に所望の位置に搬送できる。
【0102】
請求項11記載の搬送装置によれば、基板拘持部は、屈折構造の一方における腕部材の他方の回転角と、屈折構造の他方における腕部材の他方の回転角とを整合する整合構造を有するので、屈折構造の動作をさらに正確に同調させることができ、基板をさらに正確に所望の位置に搬送できる。
【0103】
請求項12記載の搬送装置によれば、円柱体は中心軸方向に沿って穿孔された貫通孔を有し、環状体は貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ筐体は他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有するので、当該貫通孔、他の貫通孔及びさらに他の貫通孔を介して筐体内部の気体排出の効率を向上することができ、もってスループットをさらに向上できる。
【0104】
請求項13記載の搬送装置によれば、屈折構造の一方における腕部材の一方を軽量化でき、もって慣性モーメントを低減できる。その結果、基板の搬送速度を向上でき、よりスループットを向上できる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態に係る搬送装置が配設されたクラスタ基板処理システムの概略構成を示す平面図である。
【図2】図1のクラスタ基板処理システム10における基板ハンドリング機構16の概略構成を示す斜視図である。
【図3】図2の基板ハンドリング機構16を内包する搬送室15の概略構成を示す断面図である。
【図4】図2の基板ハンドリング機構16が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【図5】図2の基板ハンドリング機構16が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【図6】本発明の第2の実施の形態に係る搬送装置の概略構成を示す斜視図である。
【図7】図6の基板ハンドリング機構60を内包する搬送室15の概略構成を示す断面図である。
【図8】図7の基板ハンドリング機構60が実行する基板Wの直線方向に関する搬送方法を説明する図である。
【図9】図7の基板ハンドリング機構60が実行する基板Wの方向変換を伴う搬送方法を説明する図である。
【図10】図6における拘持部68が有する第1アーム部63の回転角及び第2アーム部66の回転角を整合する整合構造100の概略構成を示す平面図である。
【図11】基板ハンドリング機構16を使用する他の基板処理システム114の概略構成を示す平面図である。
【図12】スカラアーム式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【図13】図12におけるスカラアーム式ハンドリング機構125の概略構成を示す斜視図である。
【図14】フロッグレッグ式ハンドリング機構が配設された従来のクラスタ基板処理システムの概略構成を示す平面図である。
【図15】図13のスカラアーム式ハンドリング機構125を内包する搬送室124の概略構成を示す断面図である。
【符号の説明】
10 クラスタ基板処理システム
11 基板処理装置
14 ウエハ搬出入室
15 搬送室
16,60 基板ハンドリング機構
20,61 回転部
21 アーム部
22 拘持部
31 開口部
32,71 収容空間
63 第1アーム部
64 第1レッグ部
65 環状回転部
66 第2アーム部
67 第2レッグ部
68 拘持部
33,34,72,73,74 排気ポート
100 整合構造
Claims (13)
- 基板を支持する少なくとも2つの腕部材を備えると共に筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方に回転自在に接続される基板の搬送装置において、
前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記一端までの距離よりも大きいことを特徴とする搬送装置。 - 前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記円柱体を収容することを特徴とする請求項1記載の搬送装置。
- 前記腕部材収容孔の直径は、前記円柱体の直径とほぼ一致することを特徴とする請求項2記載の搬送装置。
- 前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記筐体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有することを特徴とする請求項1乃至3のいずれか1項に記載の搬送装置。
- 前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする請求項1乃至4のいずれか1項に記載の搬送装置。
- 基板を支持する少なくとも2つの腕部材を備えると共に筐体内部に配設され、且つ前記腕部材の一方はその一端において前記腕部材の他方の一端と回転自在に接続される屈折構造を少なくとも2つ備える基板の搬送装置において、
前記屈折構造の一方における前記腕部材の一方は、中心部が前記筐体に回転自在に接続された円柱体から成り、前記円柱体の半径は、前記中心部から前記腕部材の他方の一端までの距離よりも小さく、且つ前記屈折構造の他方における前記腕部材の一方は、前記円柱体の中心軸に沿って配設された環状体であることを特徴とする搬送装置。 - 前記筐体は、円柱状の腕部材収容孔を備え、該腕部材収容孔は前記環状体を収容することを特徴とする請求項6記載の搬送装置。
- 前記腕部材収容孔の直径は、前記環状体の外径とほぼ一致することを特徴とする請求項7記載の搬送装置。
- 前記屈折構造の一方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離は、前記屈折構造の他方の前記腕部材の一方における前記腕部材の他方に対する回転軸から前記中心部までの距離と等しいことを特徴とする請求項6乃至8のいずれか1項に記載の搬送装置。
- 前記屈折構造の各々を、前記腕部材の他方の他端において互いに接続する基板拘持部を備えることを特徴とする請求項6乃至9のいずれか1項に記載の搬送装置。
- 前記基板拘持部は、前記屈折構造の一方における前記腕部材の他方の回転角と、前記屈折構造の他方における前記腕部材の他方の回転角とを整合する整合構造を有することを特徴とする請求項10記載の搬送装置。
- 前記円柱体は中心軸方向に沿って穿孔された貫通孔を有し、前記環状体は前記貫通孔に対応する位置に穿孔された他の貫通孔を有し、且つ前記筐体は前記他の貫通孔に対応する位置に穿孔されたさらに他の貫通孔を有することを特徴とする請求項6乃至11のいずれか1項に記載の搬送装置。
- 前記円柱体には、その中心軸に沿った円柱孔が穿孔されていることを特徴とする請求項6乃至12のいずれか1項に記載の搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002377737A JP2004207648A (ja) | 2002-12-26 | 2002-12-26 | 基板の搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002377737A JP2004207648A (ja) | 2002-12-26 | 2002-12-26 | 基板の搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004207648A true JP2004207648A (ja) | 2004-07-22 |
Family
ID=32814825
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002377737A Pending JP2004207648A (ja) | 2002-12-26 | 2002-12-26 | 基板の搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004207648A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014132960A1 (ja) * | 2013-03-01 | 2014-09-04 | コマツNtc株式会社 | 二次元移動閉リンク構造 |
| JPWO2015145576A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士機械製造株式会社 | 多関節ロボットアーム |
-
2002
- 2002-12-26 JP JP2002377737A patent/JP2004207648A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014132960A1 (ja) * | 2013-03-01 | 2014-09-04 | コマツNtc株式会社 | 二次元移動閉リンク構造 |
| US9732787B2 (en) | 2013-03-01 | 2017-08-15 | Komatsu Ntc Ltd. | Two-dimensional movement closed-link structure |
| JPWO2015145576A1 (ja) * | 2014-03-25 | 2017-04-13 | 富士機械製造株式会社 | 多関節ロボットアーム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6179910B2 (ja) | 異なる保持エンドエフェクタを有する基板搬送装置 | |
| KR101024530B1 (ko) | 기판 처리 장치, 기판 처리 방법 및, 컴퓨터 판독 가능 기억 매체 | |
| US6244811B1 (en) | Atmospheric wafer transfer module with nest for wafer transport robot | |
| JP6285926B2 (ja) | ブーム駆動装置、マルチアームロボット装置、電子デバイス処理システム、および電子デバイス製造システムにおいて基板を搬送するための方法 | |
| TWI707754B (zh) | 包括間隔上臂與交錯腕部的雙機器人以及包括該者之方法 | |
| JP5329705B2 (ja) | デカルトロボットクラスタツール構築 | |
| JP6454201B2 (ja) | 基板搬送方法及び基板処理装置 | |
| JP2023155280A (ja) | 基板処理システム、及び基板処理方法 | |
| US6582175B2 (en) | Robot for handling semiconductor wafers | |
| TWI896510B (zh) | 處理套組外殼系統 | |
| CN101202209A (zh) | 制造半导体元件之装置 | |
| JP2012039125A (ja) | 半導体ウェハを操作するための改善されたロボット | |
| US20090087289A1 (en) | Structure for storing a substrate and semiconductor manufacturing apparatus | |
| KR101453189B1 (ko) | 반송 장치 | |
| TWI861471B (zh) | 用於移送基板的方法及真空機器人裝置,以及包括其的電子元件處理系統 | |
| TW201921570A (zh) | 包括垂直偏離、水平重疊的蛙腳連桿的雙葉片機器人及其系統和方法 | |
| US20040231146A1 (en) | Intermediate product manufacturing apparatus, and intermediate product manufacturing method | |
| JP2004207648A (ja) | 基板の搬送装置 | |
| JPH1191943A (ja) | 基板搬送システム | |
| JP3050284B2 (ja) | 半導体ウエハエッチング処理装置 | |
| JP3237401B2 (ja) | 真空処理装置 | |
| JP5465979B2 (ja) | 半導体製造装置 | |
| JP7097760B2 (ja) | 搬送装置および搬送方法 | |
| JP2025526130A (ja) | マルチサイズウエハハンドリングフレーム | |
| WO2025058853A1 (en) | Wafer handling system and method |