JP2004167094A - 超音波診断装置 - Google Patents
超音波診断装置 Download PDFInfo
- Publication number
- JP2004167094A JP2004167094A JP2002338448A JP2002338448A JP2004167094A JP 2004167094 A JP2004167094 A JP 2004167094A JP 2002338448 A JP2002338448 A JP 2002338448A JP 2002338448 A JP2002338448 A JP 2002338448A JP 2004167094 A JP2004167094 A JP 2004167094A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- trocar
- probe
- support portions
- puncture needle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【課題】トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、超音波送受信の開口を広くし、穿刺針の超音波画像の画質を向上させることである。
【解決手段】超音波診断装置30は、プローブ40と、本体部50と、信号ケーブル48とから構成される。生体10の腹部に穴を開け、そこからトラカールを通して気圧を掛けて膨らませる。腹壁12の他の部位に穴を開け、その穴にトラカール20を刺す。トラカール20aにプローブ40が挿入される。プローブ40は、先端に複数の支持部70を備え、後端部の操作部60の操作により、各支持部70の離反角度を変化させ、その形態を「すぼめ」たり、「広げ」たりでき、各支持部70の間を通って穿刺針42を突き出すことができるプローブである。超音波振動子72は、各支持部70に支持されて設けられる。
【選択図】 図1
【解決手段】超音波診断装置30は、プローブ40と、本体部50と、信号ケーブル48とから構成される。生体10の腹部に穴を開け、そこからトラカールを通して気圧を掛けて膨らませる。腹壁12の他の部位に穴を開け、その穴にトラカール20を刺す。トラカール20aにプローブ40が挿入される。プローブ40は、先端に複数の支持部70を備え、後端部の操作部60の操作により、各支持部70の離反角度を変化させ、その形態を「すぼめ」たり、「広げ」たりでき、各支持部70の間を通って穿刺針42を突き出すことができるプローブである。超音波振動子72は、各支持部70に支持されて設けられる。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、超音波診断装置に係り、特に、トラカールを通して生体の体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置に関する。
【0002】
【従来の技術】
近年、内視鏡を用いた手術や検査が行われるようになってきている。内視鏡を用いた手術や検査においては、患者の腹部に穴を開け、そこから例えばトラカールを通して気圧を掛けて腹部を膨らませる。トラカールは、内径がおよそ10mm程度の中空管で、このトラカールを通して内視鏡、電気メス等の手術具を体腔内に挿入して、内視鏡の観察の下で作業を行う。このような手術や検査において、超音波探触子と穿刺針とを同じトラカールを通して体腔内に挿入し、超音波探触子を臓器等の生体組織に当接させ、リアルタイムの超音波断層像をモニタしながら穿刺針を操作し、手術や検査を行う方法が採られるようになってきている。
【0003】
穿刺針とともにトラカールを通して体腔内に挿入する超音波探触子としては、細長い棒状の探触子軸の側面にリニアアレイタイプの超音波振動子を配置したものがある。また特許文献1には、細長い棒状の探触子軸に関節部を設けて、その先に超音波振動子を配置した探触子ヘッドを設け、探触子ヘッドを探触子軸から傾斜させることができる構成が開示されている。また、内視鏡のように湾曲可能な軸の先端または側面に超音波振動子を設けたもの等も用いられる。
【0004】
【特許文献1】
特許第2664631号公報
【0005】
【発明が解決しようとする課題】
しかし、トラカールの内径は一般には約10mmと小さいために、同じトラカールに超音波振動子と穿刺針とを通し、穿刺針と生体組織をともに超音波画像で観察して、体腔内の検査あるいは手術を行うことは容易ではない。
【0006】
まず、トラカールの内径が小さいことから、トラカールを通して体腔内に挿入できる超音波振動子の大きさに制限が加えられ、十分な検査、診断を行うことができない。例えば、従来例において棒状あるいは湾曲可能な軸の先端に超音波振動子を設けたいわゆるエンドファイヤー型のものでは、超音波送受信の開口はトラカールの内径に制限され、数mmの径に過ぎない。また、棒状あるいは湾曲可能な軸の側面に超音波振動子を設けたいわゆるサイドファイヤー型のものでは、超音波送受信の開口を大きく取ろうとするときはその分トラカールの挿入先端側から体腔内に長く突き出すか、あるいは大きく曲げて長く繰り出す必要があるが、腹腔手術空間の制限のために、十分な突き出し量あるいは繰り出し量を確保することができない。
【0007】
また、同じトラカールの中で穿刺針と超音波振動子とを配置するために、超音波振動子の超音波の送受信可能領域に限度があり、生体組織のみならず穿刺針に対して複数方向からの超音波の送受信が困難である。例えば図11に示すように、トラカール20に挿入されたプローブ40の先端に超音波振動子72を設けたいわゆるエンドファイヤー型の場合、プローブ40の側面に沿って挿入される穿刺針42に対して超音波を送受信し、そのエコー信号を処理するとしても、得られる情報は穿刺針の側端面に対するもののみである。したがって、得られる穿刺針の断層画像にシャドウ等がつくことが多い。
【0008】
このように、トラカールを通して生体の体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置においては、トラカールの内径と、体腔空間等の制約から、開口の広い超音波送受信を行うことが困難であった。また、得られる穿刺針の断層画像にシャドウがつくなど超音波画像の画質に問題があった。
【0009】
本発明の目的は、かかる従来技術の課題を解決し、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、超音波送受信の開口を広くすることができる超音波診断装置を提供することである。他の目的は、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、穿刺針の超音波画像の画質を向上させることができる超音波診断装置を提供することである。
【0010】
【課題を解決するための手段】
上記目的を達成するため、本発明に係る超音波診断装置は、トラカールを通して生体の体腔内に挿入されるプローブと、本体部とを含む超音波診断装置において、前記プローブは、超音波を送受信する超音波振動子と、前記超音波振動子を支持面に支持する複数の支持部であって、前記トラカールにプローブが挿入されたときに前記トラカールの挿入先端側から前記体腔内に露出し、相互に離反して広がり広径化し、前記超音波振動子を超音波の照射対象に臨ませる複数の支持部と、前記トラカールにプローブが挿入されたときに前記トラカールの後端側から前記生体の外部に延伸する操作部と、前記複数の支持部の間を通り前記超音波の照射領域に突出する穿刺針と、前記操作部の操作量に応じて前記各支持部の離反量を変化させる可変機構と、を備え、前記本体部は、前記超音波の送受信を制御する送受信制御部と、前記複数の超音波振動子の各出力信号に基づき、前記穿刺針の合成超音波画像を形成する画像処理部と、を備えることを特徴とする。
【0011】
上記構成により、トラカールを通して生体の体腔内に挿入されるプローブの先端の複数の支持部が、操作部の操作量に応じ相互に離反する離反量を変化させる。したがって、トラカールにプローブを挿入するときは、操作部の操作により各支持部間の離反量を最小にして「すぼめ」、その状態でトラカールを通過させ、支持部がトラカールの挿入先端側から体腔内に露出した状態で、操作部を操作して各支持部間の離反量を増大させて「広げ」ることができる。そして、各支持部を「広げ」た状態では、各超音波振動子の配置も大きく広がり、超音波送受信開口を広くすることができる。
【0012】
各支持部を「広げ」た状態で、複数の支持部の間を通って前記超音波の照射領域に突出する穿刺針に対し、複数の超音波振動子からそれぞれ超音波を送信し、それぞれのエコー信号に基づいて、超音波画像を合成する。このことで、穿刺針について、1つの照射方向からの情報のみならず、多方向からの情報に基づいた画像を得ることができる。
【0013】
また、前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、前記可変機構は、前記操作部の操作量に応じて、前記各支持部の間の離反角度を変化させるものであり、前記送受信制御部は、前記離反角度に応じて形成される前記穿刺針に対する不感応領域に向けて、各超音波振動子の前記超音波の送受信方向を偏向させる制御を行うことが好ましい。
【0014】
回動軸周辺には超音波振動子を配置しにくいので、複数の支持部を組み合わせても、離反角度によっては、回動軸の周辺から穿刺針に対し超音波の送受信を行うことが難しく、その部分が穿刺針の超音波画像を形成できない不感応領域となることがおこる。上記構成により、各超音波振動子の送受信方向を不感応領域に向けて偏向させる。したがって、広い超音波送受信開口を確保し、離反角度によらず穿刺針に対する不感応領域をなくすことができる。
【0015】
また、前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、前記可変機構は、前記操作部の操作量に応じて、前記各支持部の回動角度を変化させるものであり、前記各支持部の回動角度を検出する角度センサを含み、前記画像処理部は、前記角度センサにより検出された各回動角度に基づき、前記各超音波振動子の前記超音波の送受信方向を特定し、前記穿刺針の同一観察位置に対する複数方向からの受信信号に基づき、合成超音波画像を形成することが好ましい。
【0016】
超音波照射対象に対し、複数の支持部を用いることで、同一観察位置について多方向から超音波の送受信を行い、例えば、生体組織のみならず穿刺針についてその表側から観察した情報と裏側から観察した情報を得ることができる。上記構成により、各支持部の回動角度から各超音波振動子からの超音波の送受信方向を特定する。したがって、特定された各超音波の送受信方向から、複数方向からの受信信号を合成して、例えば、表側から観察した情報と裏側から観察した情報を合成して、シャドウの少ない画質のよい画像を得ることができる。
【0017】
【発明の実施の形態】
以下、図面を用いて、本発明に係る実施の形態につき詳細に説明する。図1は、生体10に対し、内視鏡と、超音波診断装置30を用いて、生体の体腔内の生体組織を観察する様子を示した図である。
【0018】
一般に、内視鏡を用いた手術または検査においては、生体10の腹部に穴を開け、そこから例えばトラカールを通して気圧を掛けて腹部を膨らませる。図において、膨らんだ腹部について腹壁12、体腔14、体腔内の生体組織16として胆のう、生体組織16内の患部18として胆のう内の結石が示されている。腹壁12に例えば3箇所の穴を開け、その穴にそれぞれトラカール20を刺す。トラカール20としては、例えば内径が10−15mmのものを用いることができる。トラカール20aには、本実施の形態にかかる超音波診断装置30のプローブ40が挿入される。また、トラカール20bには内視鏡が、トラカール20cには電気メス等の手術具が挿入される。トラカールの数は、手術または検査の目的に応じ増減することができる。
【0019】
超音波診断装置30は、超音波振動子を備え穿刺針を挿入できるプローブ40と、プローブ40の超音波振動子に対して超音波の送受信を制御し、受信信号を処理して超音波画像を形成し表示する本体部50と、プローブ40と本体部50とを接続する信号ケーブル48から構成される。
【0020】
プローブ40は、先端に複数の支持部70を備え、後端部の操作部60の操作により、各支持部70の離反角度を変化させ、その形態を「すぼめ」たり、「広げ」たりでき、各支持部70の間を通って穿刺針42を突き出すことができるプローブである。超音波振動子72は、各支持部70に支持されて設けられる。
【0021】
図2にプローブ40の概略図を示す。このプローブ40は、先端に2個の支持部70a,70bを有するハウジング80と、ハウジング80の外周に沿って摺動可能な外筒86と、ハウジング80のほぼ中心を通る穿刺針42から構成される。後述するように、外筒86の後端部が操作部60の機能を有し、外筒86の先端部と各支持部70a,70bとの接触部分等が離反角度を変化させる可変機構の機能を有する。図2(a)は、外筒86を支持部70a,70b側に動かして離反角度を小さくし「すぼめ」た状態、(b)は、外筒86を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。なお、穿刺針42は、(a)においてはハウジング80内にとどまっており、(b)において各支持部70a,70bの間を通って突き出した状態を示す。
【0022】
ハウジング80は、筒状の部材で、その先端には回動軸82a,82bが設けられ、2個の支持部70a,70bが回動自在に係合される。回動軸82a,82bの周りには、ハウジング80と各支持部70a,70bとの間に、各支持部70a,70bを相互に離反させる方向に付勢するコイルばね84a,84bが設けられる。ハウジング80の長さは、トラカールにプローブ40が挿入されたとき、トラカールの挿入先端側から体腔内に各支持部70a,70bが露出する長さに設定される。
【0023】
ハウジング80の内部に、穿刺を行う際に穿刺針42を挿通するためのガイド81が設けられている。ガイド81には、穿刺針42の太さに対応して、例えば約1.5mm直径の穴があけられている。穿刺針42は、直針タイプまたはカテーテルタイプを用いることができる。穿刺を行う際には、穿刺針42はハウジング80の後端部からガイド81を通して挿入され、ハウジング80の先端部に向けて図2(b)に示す矢印Sの方向に押し出される。穿刺針42の軌道は、各支持部70a,70bの間を通る軸、より正確には、各支持部70a,70bがハウジング80に回動自在に係合されるその係合中心を通る軸に沿った直線軌道である。
【0024】
支持部70a,70bは、超音波振動子72a,72bを支持する機能を有する部材である。図2(a)に示すように、回動軸82a,82bの周りに支持部70a,70bを回動させて相互に対向させたときに、その対向面を支持面として、各超音波振動子72a,72bがその送受信面を向かい合わせるようにして支持される。支持部70a,70bにおいて、回動軸82a,82bの周りに、コイルばね84a,84b及び小型のエンコーダとしての角度センサ90a,90bが設けられる。回動軸82a,82b周りの構造については後述する。
【0025】
超音波振動子72a,72bは、超音波の照射対象に対し超音波の送信およびエコーの受信を行うアレイ振動子である。アレイ振動子は複数の振動素子からなり、このアレイ振動子により超音波ビームが形成される。この超音波ビームは電子走査され、その電子走査方式としては、例えば電子リニア走査や電子セクタ走査を用いることができる。
【0026】
外筒86は、ハウジング80の外周に沿って摺動できる内径と、プローブ40が挿入されるトラカールの内径よりやや小さ目の外径を有する筒状の部材である。また、その内径は、離反角度を小さくして「すぼめ」た状態のときに各支持部70a,70bをその内部に収納することができるように設定される。外筒86の長さは、トラカールにプローブ40が挿入されたとき、外筒86の後端部が、トラカールの後端側から生体の外部に延伸する程度の長さに設定される。
【0027】
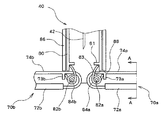
図3は、プローブ先端の部分断面図で、特に、各支持部の回動軸付近周りに設けられたコイルばね84a,84bが現れる側から見た部分断面図である。図においては、支持部70a,70bが「広げ」られるように外筒86が上方、すなわちハウジング80の後端側の方向に動かされた状態を示す。コイルばね84a,84bは、ハウジング80に設けられた回動軸82a,82bの周りに巻回して設けられ、その一端はハウジング80の内壁に設けられた回転止め81により支持され、他端は各支持部70a,70bの内壁に設けられた回転止め73a,73bにより支持される。コイルばね84a,84bの巻き方向は、回動軸82a,82bを中心として、各支持部70a,70bが相互に離反し、離反角度を大きくする方向に付勢されるように設定される。
【0028】
したがって、コイルばね84a,84bの付勢力により、各支持部70a,70bの支持面の裏面74a,74bと外筒86の先端部88とは相互に押し付けられる方向に接触し、外筒86をハウジング80に沿って摺動させる操作量に応じて離反角度を変化させることができる。すなわち、外筒86の後端部が操作部としての機能を有し、外筒86の先端部88と各支持部70a,70bの支持面の裏面74a,74b及びコイルばね84a,84bとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。なお、ハウジング80の下端部83は、各支持部70a,70bの離反角度の上限を規定するストッパとしての機能を有する。
【0029】
図3におけるA−A線に沿った断面図を図4に示す。支持部70aは、断面の外形輪郭が略半円形あるいは略かまぼこ形をなし、内部が中空の薄肉成形部材である。断面において底面側には超音波振動子72aが固定される。ハウジング80に設けられた回動軸82aは、支持部70aの両側面に設けられた穴を通って、支持部70aの断面のほぼ中央を横切る。回動軸82a周りに巻回してコイルばね84aが設けられ、また、角度センサ90aが設けられる。
【0030】
角度センサ90aとしての小型エンコーダの例は、光学式エンコーダである。光学式エンコーダは、例えば、ハウジングに設けられた回動軸82aに固定されたスリット付円板92aと、支持部70aの内壁部分に固定されたフォトインタラプタ94aとから構成することができる。スリット付円板92aは、円板の円周方向に沿って複数のスリットが刻まれ、フォトインタラプタ94aは、スリット付円板92aを挟んで一方側に発光部、他方側に受光部を備える。この構成において、支持部70aが回動軸82a周りに回動すると、スリット付円板92aがフォトインタラプタ94aに対し相対的に回動し、その回動角度は、円板に刻まれたスリットがフォトインタラプタ94aを横切る数で検出できる。スリット付円板にかえて遮光性部分と透光性部分が規則性をもって配置される部材を用いることもできる。
【0031】
上記のように、支持部70a,70bにそれぞれ角度センサ90a,90bが設けられる。角度センサ90aは、ハウジング80に対する支持部70aの回動軸82a周りの回動角度を検出し、同様に角度センサ90bは、ハウジング80に対する支持部70bの回動軸82b周りの回動角度を検出する。ハウジング80に対する各支持部70a,70bの回動角度から、2個の支持部間の離反角度θabを求めることができる。
【0032】
図4に示すように、スリット付円板92aにより、回動軸82a近傍の内部が2分される。スリット付円板92aの片側の空間にはコイルばね84aが収納され、もう片側の空間には、超音波振動子72aからの信号線77aが収納される。信号線77aは、スリット付円板92aの片側の専用空間を通り、角度センサ90aの信号線とともに信号ケーブル48を構成し、本体部50に接続される。
【0033】
図5は、他の角度センサ91aの例として、磁気式エンコーダを示したものである。磁気式エンコーダは、例えば、円周の一部に磁石チップが取り付けられた円板96aと、磁気検出器98aとから構成することができる。円板96aは回動軸82aに固定され、磁気検出器98aは支持部70aに固定される。この構成において、支持部70aが回動軸82a周りに回動すると、円板96aが磁気検出器98aに対し相対的に回動し、その回動角度は、円板96aに取り付けられた磁石チップと磁気検出器98aとの相対関係で検出できる。磁気検出器として例えばMR(磁気抵抗)素子等を用いることができる。
【0034】
再び図1に戻り、上記構成のプローブ40の生体組織16に対する作用について説明する。図1において、まずトラカール20aにプローブ40を挿入する。挿入に際しては、外筒の後端部である操作部60を操作してプローブ40の先端部に設けられた2個の支持部70の離反角度を最初にして「すぼめ」た状態にして行う。次にトラカール20bに挿入された内視鏡を用い、体腔14内における生体組織16である胆のうについておよその位置を特定する。そして、内視鏡を見ながら、トラカール20aに挿入したプローブ40の先端部に設けられた2個の支持部70を生体組織16である胆のうに近づける。ついで操作部60を操作して、2個の支持部70の離反角度を大きくして「広げ」、プローブ40全体をトラカール20aに沿ってさらに押し込み、2個の支持部70を生体組織16である胆のうに接触させる。
【0035】
図6は、プローブ40の先端近傍の様子を拡大断面図で示したものである。超音波振動子72が生体組織16に接触させた状態において、本体部50の制御により超音波振動子72から超音波を送信し、生体組織16からのエコー信号を処理して断層画像を得る。この断層画像を観察しながら結石等の患部18を特定し、穿刺針42を2個の支持部70の間から突き出す。超音波振動子72から送信される超音波は穿刺針42からも反射されるので、そのエコー信号を処理して穿刺針42の断層画像を得る。したがって、生体組織16と穿刺針42の双方の断層画像を観察しながら患部18に対し的確な穿刺を行うことができる。
【0036】
図7は、複数の超音波振動子を用いた超音波診断装置30の信号処理系についてのブロック図である。超音波診断装置30は、プローブ40において2個の超音波振動子72a,72bと、角度センサ90a,90bを備える。各超音波振動子72a,72bと各角度センサ90a,90bは、信号ケーブルで本体部50と接続される。
【0037】
本体部50において、送信部302a,302bは、各超音波振動子72a,72b内部に設けられるアレイ振動子の各チャネルごとに遅延された送信信号を供給する機能を有するものである。受信部304a,304bは、各超音波振動子72a,72bからのエコー信号を増幅し、各チャネル間の受信信号の位相差を調整する整相加算等の処理を行い、受信信号として信号処理部308a,308bに出力する回路である。
【0038】
送受信制御部306は、各送信部302a,302b、各受信部304a,304bを制御する機能を有する。また、各支持部の回動角度に応じて、各超音波振動子72a,72bの超音波の送受信方向を制御することもできる。
【0039】
図8は、各超音波振動子の超音波の送受信方向を偏向させる制御を行う様子を示す図である。図において、各支持部70a,70bの回動角度が十分大きいとき、各超音波振動子72a,72bの超音波の送受信方向を送受信面に垂直方向fa,fbとすると、超音波振動子が配置されない部分に対応して超音波の送受信が行われない不感応領域Xができる。上記のように、穿刺針42は、各支持部70a,70bの間、より正確には、各支持部70a,70bがハウジング80に回動自在に係合されるその係合中心を通って突き出るので、不感応領域にあり、そのままでは穿刺針42に対して超音波の送受信が行われない。そこで、各超音波振動子72a,72bの超音波の送受信方向を制御し、不感応領域Xに向けてfa‘,fb’と偏向させる。
【0040】
このように、複数の支持部を組み合わせたとき、離反角度によっては、回動軸の周辺から穿刺針や診断対象部位に対し超音波の送受信を行うことが難しく、その部分が超音波画像を形成できない不感応領域となることがおこるが、各超音波振動子の送受信方向を不感応領域に向けて偏向させることで、不感応領域をなくし、穿刺針42及び診断対象部位に対し超音波の送受信を行うことができる。したがって、離反角度によらず不感応領域をなくし、広い超音波送受信開口を確保し、広い範囲にわたり、穿刺針42及び診断対象部位の情報を確実に得ることができる。
【0041】
信号処理部308a,308bは、例えばBモード信号処理を行うときは、超音波ビームについて各受信部304a,304bから出力される整相加算後の受信信号に基づき、エコー信号の包絡振幅を抽出する検波、包絡振幅信号の対数圧縮等の処理を行う機能を有する。Bモード信号処理のほか、必要に応じドプラ信号処理の機能を含ませることもできる。
【0042】
画像処理部310は、信号処理部308a,308bと接続され、例えばBモード信号処理出力に対し座標変換やデータ補間等の処理を行ってBモード断層画像を形成する機能を有する。画像処理の結果は表示部312に出力される。
【0043】
画像処理には、各超音波振動子72a,72bからの各受信信号をそれぞれ信号処理し、画像処理して複数の断層画像を形成するほかに、各超音波振動子72a,72bからの各受信信号に基づいて合成超音波画像を形成することができる。各超音波振動子の超音波の送受信方向は、送受信制御部306の制御信号と、各角度センサ90a,90bが出力する各支持部の回動角度から特定できるので、超音波診断対象に対する複数の超音波の送受信がそれぞれ求められ、その受信信号を合成することで、診断対象につきシャドウの少ない画像形成を行うことができる。また、穿刺針42についてもシャドウの少ない画像形成を行うことができる。
【0044】
例えば、図6に戻って説明すると、この場合の各支持部70a,70bの回動角度においては、生体組織16内の患部18の観察位置Pは、支持部70aの超音波振動子72aの送受信方向faと、支持部70bの超音波振動子72bの送受信方向fbとの2方向が交差する。すなわち、観察位置Pについて、超音波振動子72aの超音波の送受信により、図において右斜め上からの情報を得ることができ、超音波振動子72bの超音波の送受信により、左斜め上からの情報を得ることができる。この2方向からのエコー信号を信号処理し、画像形成において超音波画像を合成することで、穿刺針42からみて患部18の裏側にあたる観察位置Pについてもシャドウの少ない良質の画像を得ることができる。
【0045】
上記説明においてプローブの構成は、支持部の数を2個とし、各支持部の離反角度は外筒の操作により行うものとしたが、それ以外の機構を有するプローブを用いることもできる。
【0046】
図9は、支持部の数を3個または4個とするプローブ140の例を示す図である。このプローブ140は、先端に3個の支持部170a,170b,170cを有するハウジング180と、ハウジング180の外周に沿って摺動可能な外筒186とから構成される。3個の支持部170a,170b,170cは、ハウジング180に設けられた回動軸182a,182b,182cに回動自在に係合される。また、外筒86に設けられたリンク支軸183a,183b,183cと、各支持部170a,170b,170cの支持面の裏面174a,174b,174cにそれぞれ設けられたリンク支軸173a,173b,173cとの間は、それぞれリンク部材184a,184b,184cにより接続される。
【0047】
上記構成において、外筒186をハウジング180の外周に沿って動かすことで、リンク部材184a,184b,184cを介し各支持部170a,170b,170cを回動軸182a,182b,182cまわりに回動させることができる。したがって、外筒186をハウジング180に沿って摺動させる操作量に応じて、各支持部170a,170b,170cの離反角度を変化させることができる。
【0048】
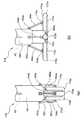
すなわち、外筒186の後端部が操作部としての機能を有し、外筒186とリンク部材184a,184b,184cとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。図9(a)は、外筒186を支持部170a,170b,170c側に動かして離反角度を小さくし「すぼめ」た状態、(b)は、外筒186を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。
【0049】
上記構成と同様な構成でさらに支持部の数を4個に増加させ、外筒をハウジングに沿って摺動させる操作量に応じて、4個の支持部の離反角度を変化させることもできる。
【0050】
図10は、外筒を用いず、可変機構をハウジングの内部に収容するプローブ240の例を示す図である。このプローブ240は、ハウジング280を備え、ハウジング280に設けられた回動軸282a,282bに2個の支持部270a,270bが回動自在に係合され、ハウジング280内部に、ハウジング280の内周に沿って摺動可能な内筒286が配置される。そして、内筒286に設けられたリンク支軸283a,283bと、各支持部270a,270bにそれぞれ設けられたリンク支軸273a,273bとの間は、それぞれリンク部材284a,284bにより接続される。各リンク支軸273a,273bとそれに対応する各回動軸282a,282bとの距離はできるだけ離すことが望ましい。内筒286の長さは、トラカールにプローブ240が挿入されたとき、内筒286の後端部が、トラカールの後端側から生体の外部に延伸する程度の長さに設定される。
【0051】
上記構成において、内筒286をハウジング280の内周に沿って動かすことで、リンク部材284a,284bを介し各支持部270a,270bを回動軸282a,282bまわりに回動させることができる。したがって、内筒286をハウジング280に沿って摺動させる操作量に応じて、各支持部270a,270bの離反角度を変化させることができる。
【0052】
すなわち、内筒286の後端部が操作部としての機能を有し、内筒286とリンク部材284a,284bとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。図10(a)は、内筒286を支持部270a,270b側から遠ざける方向に動かして離反角度を小さくし「すぼめ」た状態、(b)は、内筒286を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。
【0053】
また、図10において、プローブ240の先端側にシール部材290を装着することができる。すなわち、可変機構はハウジング280の内部に収容されるので、伸縮性を有し、機械的強度が高い材料、例えばフッ素ゴムやEPDM(エチレンプロピレンジエンモノマー)素材をシール部材290として用い、ハウジング280の先端部及び各支持部270a,270bの回動軸282a,282b周辺を被覆し、ゴムバンド292でしっかり封止する。なお、シール部材290において、穿刺の際に穿刺針42の通る部分には開口部が設けられるが、例えば内径が伸縮自在の案内穴部材等を有する開口部として、穿刺針42に対してもシールを行うことができる。このことで、体腔内の生体組織を可変機構によって汚染することを防止し、また、可変機構が生体組織により汚染されることも防止できる。また、プローブの使用後の洗浄、滅菌処理が容易となる。
【0054】
内筒の代わりに、ハウジングの内部に2個の操作部材を設け、その端部にそれぞれリンク支軸を設けて、リンク部材を介して各支持部に設けられたリンク支軸と接続することでも、図10のプローブと同様の作用を得ることができる。
【0055】
【発明の効果】
本発明に係る超音波診断装置によれば、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、超音波送受信の開口を広くすることができる。本発明に係る超音波診断装置によれば、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、穿刺針の超音波画像の画質を向上させることができる。
【図面の簡単な説明】
【図1】本発明に係る実施の形態の超音波診断装置を用いて、生体の体腔内の生体組織を観察する様子を示した図である。
【図2】本発明に係る実施の形態の超音波診断装置におけるプローブの概略図である。
【図3】コイルばねが現れる側から見たプローブ先端の部分断面図である。
【図4】図3におけるA−A線に沿った支持部の断面図である。
【図5】他の実施の形態の角度センサの例を示す図である。
【図6】プローブの先端近傍の様子を拡大断面図で示したものである。
【図7】本発明に係る実施の形態の超音波診断装置の信号処理系についてのブロック図である。
【図8】各超音波振動子の超音波の送受信方向を偏向させる制御を行う様子を示す図である。
【図9】他の実施の形態のプローブの例を示す図である。
【図10】他の実施の形態のプローブの例を示す図である。
【図11】従来の超音波振動子と穿刺針との関係の例を示す図である。
【符号の説明】
10 生体、12 腹壁、14 体腔、16 生体組織、18 患部、20,20a,20b,20c トラカール、30 超音波診断装置、40,140,240 プローブ、42 穿刺針、48 信号ケーブル、50 本体部、60 操作部、70,70a,70b,170a,170b,170c,270a,270b 支持部、72,72a,72b 超音波振動子、80,180,280ハウジング、82a,82b,182a,182b,182c,270a,270b 回動軸、86,186 外筒、90a,90b,91a 角度センサ、184a,184b,184c,284a,284b リンク部材、286 内筒、290 シール部材、302a,302b 送信部、304a,304b 受信部、306 送受信制御部、308a,308b 信号処理部、310 画像処理部、312 表示部。
【発明の属する技術分野】
本発明は、超音波診断装置に係り、特に、トラカールを通して生体の体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置に関する。
【0002】
【従来の技術】
近年、内視鏡を用いた手術や検査が行われるようになってきている。内視鏡を用いた手術や検査においては、患者の腹部に穴を開け、そこから例えばトラカールを通して気圧を掛けて腹部を膨らませる。トラカールは、内径がおよそ10mm程度の中空管で、このトラカールを通して内視鏡、電気メス等の手術具を体腔内に挿入して、内視鏡の観察の下で作業を行う。このような手術や検査において、超音波探触子と穿刺針とを同じトラカールを通して体腔内に挿入し、超音波探触子を臓器等の生体組織に当接させ、リアルタイムの超音波断層像をモニタしながら穿刺針を操作し、手術や検査を行う方法が採られるようになってきている。
【0003】
穿刺針とともにトラカールを通して体腔内に挿入する超音波探触子としては、細長い棒状の探触子軸の側面にリニアアレイタイプの超音波振動子を配置したものがある。また特許文献1には、細長い棒状の探触子軸に関節部を設けて、その先に超音波振動子を配置した探触子ヘッドを設け、探触子ヘッドを探触子軸から傾斜させることができる構成が開示されている。また、内視鏡のように湾曲可能な軸の先端または側面に超音波振動子を設けたもの等も用いられる。
【0004】
【特許文献1】
特許第2664631号公報
【0005】
【発明が解決しようとする課題】
しかし、トラカールの内径は一般には約10mmと小さいために、同じトラカールに超音波振動子と穿刺針とを通し、穿刺針と生体組織をともに超音波画像で観察して、体腔内の検査あるいは手術を行うことは容易ではない。
【0006】
まず、トラカールの内径が小さいことから、トラカールを通して体腔内に挿入できる超音波振動子の大きさに制限が加えられ、十分な検査、診断を行うことができない。例えば、従来例において棒状あるいは湾曲可能な軸の先端に超音波振動子を設けたいわゆるエンドファイヤー型のものでは、超音波送受信の開口はトラカールの内径に制限され、数mmの径に過ぎない。また、棒状あるいは湾曲可能な軸の側面に超音波振動子を設けたいわゆるサイドファイヤー型のものでは、超音波送受信の開口を大きく取ろうとするときはその分トラカールの挿入先端側から体腔内に長く突き出すか、あるいは大きく曲げて長く繰り出す必要があるが、腹腔手術空間の制限のために、十分な突き出し量あるいは繰り出し量を確保することができない。
【0007】
また、同じトラカールの中で穿刺針と超音波振動子とを配置するために、超音波振動子の超音波の送受信可能領域に限度があり、生体組織のみならず穿刺針に対して複数方向からの超音波の送受信が困難である。例えば図11に示すように、トラカール20に挿入されたプローブ40の先端に超音波振動子72を設けたいわゆるエンドファイヤー型の場合、プローブ40の側面に沿って挿入される穿刺針42に対して超音波を送受信し、そのエコー信号を処理するとしても、得られる情報は穿刺針の側端面に対するもののみである。したがって、得られる穿刺針の断層画像にシャドウ等がつくことが多い。
【0008】
このように、トラカールを通して生体の体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置においては、トラカールの内径と、体腔空間等の制約から、開口の広い超音波送受信を行うことが困難であった。また、得られる穿刺針の断層画像にシャドウがつくなど超音波画像の画質に問題があった。
【0009】
本発明の目的は、かかる従来技術の課題を解決し、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、超音波送受信の開口を広くすることができる超音波診断装置を提供することである。他の目的は、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、穿刺針の超音波画像の画質を向上させることができる超音波診断装置を提供することである。
【0010】
【課題を解決するための手段】
上記目的を達成するため、本発明に係る超音波診断装置は、トラカールを通して生体の体腔内に挿入されるプローブと、本体部とを含む超音波診断装置において、前記プローブは、超音波を送受信する超音波振動子と、前記超音波振動子を支持面に支持する複数の支持部であって、前記トラカールにプローブが挿入されたときに前記トラカールの挿入先端側から前記体腔内に露出し、相互に離反して広がり広径化し、前記超音波振動子を超音波の照射対象に臨ませる複数の支持部と、前記トラカールにプローブが挿入されたときに前記トラカールの後端側から前記生体の外部に延伸する操作部と、前記複数の支持部の間を通り前記超音波の照射領域に突出する穿刺針と、前記操作部の操作量に応じて前記各支持部の離反量を変化させる可変機構と、を備え、前記本体部は、前記超音波の送受信を制御する送受信制御部と、前記複数の超音波振動子の各出力信号に基づき、前記穿刺針の合成超音波画像を形成する画像処理部と、を備えることを特徴とする。
【0011】
上記構成により、トラカールを通して生体の体腔内に挿入されるプローブの先端の複数の支持部が、操作部の操作量に応じ相互に離反する離反量を変化させる。したがって、トラカールにプローブを挿入するときは、操作部の操作により各支持部間の離反量を最小にして「すぼめ」、その状態でトラカールを通過させ、支持部がトラカールの挿入先端側から体腔内に露出した状態で、操作部を操作して各支持部間の離反量を増大させて「広げ」ることができる。そして、各支持部を「広げ」た状態では、各超音波振動子の配置も大きく広がり、超音波送受信開口を広くすることができる。
【0012】
各支持部を「広げ」た状態で、複数の支持部の間を通って前記超音波の照射領域に突出する穿刺針に対し、複数の超音波振動子からそれぞれ超音波を送信し、それぞれのエコー信号に基づいて、超音波画像を合成する。このことで、穿刺針について、1つの照射方向からの情報のみならず、多方向からの情報に基づいた画像を得ることができる。
【0013】
また、前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、前記可変機構は、前記操作部の操作量に応じて、前記各支持部の間の離反角度を変化させるものであり、前記送受信制御部は、前記離反角度に応じて形成される前記穿刺針に対する不感応領域に向けて、各超音波振動子の前記超音波の送受信方向を偏向させる制御を行うことが好ましい。
【0014】
回動軸周辺には超音波振動子を配置しにくいので、複数の支持部を組み合わせても、離反角度によっては、回動軸の周辺から穿刺針に対し超音波の送受信を行うことが難しく、その部分が穿刺針の超音波画像を形成できない不感応領域となることがおこる。上記構成により、各超音波振動子の送受信方向を不感応領域に向けて偏向させる。したがって、広い超音波送受信開口を確保し、離反角度によらず穿刺針に対する不感応領域をなくすことができる。
【0015】
また、前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、前記可変機構は、前記操作部の操作量に応じて、前記各支持部の回動角度を変化させるものであり、前記各支持部の回動角度を検出する角度センサを含み、前記画像処理部は、前記角度センサにより検出された各回動角度に基づき、前記各超音波振動子の前記超音波の送受信方向を特定し、前記穿刺針の同一観察位置に対する複数方向からの受信信号に基づき、合成超音波画像を形成することが好ましい。
【0016】
超音波照射対象に対し、複数の支持部を用いることで、同一観察位置について多方向から超音波の送受信を行い、例えば、生体組織のみならず穿刺針についてその表側から観察した情報と裏側から観察した情報を得ることができる。上記構成により、各支持部の回動角度から各超音波振動子からの超音波の送受信方向を特定する。したがって、特定された各超音波の送受信方向から、複数方向からの受信信号を合成して、例えば、表側から観察した情報と裏側から観察した情報を合成して、シャドウの少ない画質のよい画像を得ることができる。
【0017】
【発明の実施の形態】
以下、図面を用いて、本発明に係る実施の形態につき詳細に説明する。図1は、生体10に対し、内視鏡と、超音波診断装置30を用いて、生体の体腔内の生体組織を観察する様子を示した図である。
【0018】
一般に、内視鏡を用いた手術または検査においては、生体10の腹部に穴を開け、そこから例えばトラカールを通して気圧を掛けて腹部を膨らませる。図において、膨らんだ腹部について腹壁12、体腔14、体腔内の生体組織16として胆のう、生体組織16内の患部18として胆のう内の結石が示されている。腹壁12に例えば3箇所の穴を開け、その穴にそれぞれトラカール20を刺す。トラカール20としては、例えば内径が10−15mmのものを用いることができる。トラカール20aには、本実施の形態にかかる超音波診断装置30のプローブ40が挿入される。また、トラカール20bには内視鏡が、トラカール20cには電気メス等の手術具が挿入される。トラカールの数は、手術または検査の目的に応じ増減することができる。
【0019】
超音波診断装置30は、超音波振動子を備え穿刺針を挿入できるプローブ40と、プローブ40の超音波振動子に対して超音波の送受信を制御し、受信信号を処理して超音波画像を形成し表示する本体部50と、プローブ40と本体部50とを接続する信号ケーブル48から構成される。
【0020】
プローブ40は、先端に複数の支持部70を備え、後端部の操作部60の操作により、各支持部70の離反角度を変化させ、その形態を「すぼめ」たり、「広げ」たりでき、各支持部70の間を通って穿刺針42を突き出すことができるプローブである。超音波振動子72は、各支持部70に支持されて設けられる。
【0021】
図2にプローブ40の概略図を示す。このプローブ40は、先端に2個の支持部70a,70bを有するハウジング80と、ハウジング80の外周に沿って摺動可能な外筒86と、ハウジング80のほぼ中心を通る穿刺針42から構成される。後述するように、外筒86の後端部が操作部60の機能を有し、外筒86の先端部と各支持部70a,70bとの接触部分等が離反角度を変化させる可変機構の機能を有する。図2(a)は、外筒86を支持部70a,70b側に動かして離反角度を小さくし「すぼめ」た状態、(b)は、外筒86を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。なお、穿刺針42は、(a)においてはハウジング80内にとどまっており、(b)において各支持部70a,70bの間を通って突き出した状態を示す。
【0022】
ハウジング80は、筒状の部材で、その先端には回動軸82a,82bが設けられ、2個の支持部70a,70bが回動自在に係合される。回動軸82a,82bの周りには、ハウジング80と各支持部70a,70bとの間に、各支持部70a,70bを相互に離反させる方向に付勢するコイルばね84a,84bが設けられる。ハウジング80の長さは、トラカールにプローブ40が挿入されたとき、トラカールの挿入先端側から体腔内に各支持部70a,70bが露出する長さに設定される。
【0023】
ハウジング80の内部に、穿刺を行う際に穿刺針42を挿通するためのガイド81が設けられている。ガイド81には、穿刺針42の太さに対応して、例えば約1.5mm直径の穴があけられている。穿刺針42は、直針タイプまたはカテーテルタイプを用いることができる。穿刺を行う際には、穿刺針42はハウジング80の後端部からガイド81を通して挿入され、ハウジング80の先端部に向けて図2(b)に示す矢印Sの方向に押し出される。穿刺針42の軌道は、各支持部70a,70bの間を通る軸、より正確には、各支持部70a,70bがハウジング80に回動自在に係合されるその係合中心を通る軸に沿った直線軌道である。
【0024】
支持部70a,70bは、超音波振動子72a,72bを支持する機能を有する部材である。図2(a)に示すように、回動軸82a,82bの周りに支持部70a,70bを回動させて相互に対向させたときに、その対向面を支持面として、各超音波振動子72a,72bがその送受信面を向かい合わせるようにして支持される。支持部70a,70bにおいて、回動軸82a,82bの周りに、コイルばね84a,84b及び小型のエンコーダとしての角度センサ90a,90bが設けられる。回動軸82a,82b周りの構造については後述する。
【0025】
超音波振動子72a,72bは、超音波の照射対象に対し超音波の送信およびエコーの受信を行うアレイ振動子である。アレイ振動子は複数の振動素子からなり、このアレイ振動子により超音波ビームが形成される。この超音波ビームは電子走査され、その電子走査方式としては、例えば電子リニア走査や電子セクタ走査を用いることができる。
【0026】
外筒86は、ハウジング80の外周に沿って摺動できる内径と、プローブ40が挿入されるトラカールの内径よりやや小さ目の外径を有する筒状の部材である。また、その内径は、離反角度を小さくして「すぼめ」た状態のときに各支持部70a,70bをその内部に収納することができるように設定される。外筒86の長さは、トラカールにプローブ40が挿入されたとき、外筒86の後端部が、トラカールの後端側から生体の外部に延伸する程度の長さに設定される。
【0027】
図3は、プローブ先端の部分断面図で、特に、各支持部の回動軸付近周りに設けられたコイルばね84a,84bが現れる側から見た部分断面図である。図においては、支持部70a,70bが「広げ」られるように外筒86が上方、すなわちハウジング80の後端側の方向に動かされた状態を示す。コイルばね84a,84bは、ハウジング80に設けられた回動軸82a,82bの周りに巻回して設けられ、その一端はハウジング80の内壁に設けられた回転止め81により支持され、他端は各支持部70a,70bの内壁に設けられた回転止め73a,73bにより支持される。コイルばね84a,84bの巻き方向は、回動軸82a,82bを中心として、各支持部70a,70bが相互に離反し、離反角度を大きくする方向に付勢されるように設定される。
【0028】
したがって、コイルばね84a,84bの付勢力により、各支持部70a,70bの支持面の裏面74a,74bと外筒86の先端部88とは相互に押し付けられる方向に接触し、外筒86をハウジング80に沿って摺動させる操作量に応じて離反角度を変化させることができる。すなわち、外筒86の後端部が操作部としての機能を有し、外筒86の先端部88と各支持部70a,70bの支持面の裏面74a,74b及びコイルばね84a,84bとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。なお、ハウジング80の下端部83は、各支持部70a,70bの離反角度の上限を規定するストッパとしての機能を有する。
【0029】
図3におけるA−A線に沿った断面図を図4に示す。支持部70aは、断面の外形輪郭が略半円形あるいは略かまぼこ形をなし、内部が中空の薄肉成形部材である。断面において底面側には超音波振動子72aが固定される。ハウジング80に設けられた回動軸82aは、支持部70aの両側面に設けられた穴を通って、支持部70aの断面のほぼ中央を横切る。回動軸82a周りに巻回してコイルばね84aが設けられ、また、角度センサ90aが設けられる。
【0030】
角度センサ90aとしての小型エンコーダの例は、光学式エンコーダである。光学式エンコーダは、例えば、ハウジングに設けられた回動軸82aに固定されたスリット付円板92aと、支持部70aの内壁部分に固定されたフォトインタラプタ94aとから構成することができる。スリット付円板92aは、円板の円周方向に沿って複数のスリットが刻まれ、フォトインタラプタ94aは、スリット付円板92aを挟んで一方側に発光部、他方側に受光部を備える。この構成において、支持部70aが回動軸82a周りに回動すると、スリット付円板92aがフォトインタラプタ94aに対し相対的に回動し、その回動角度は、円板に刻まれたスリットがフォトインタラプタ94aを横切る数で検出できる。スリット付円板にかえて遮光性部分と透光性部分が規則性をもって配置される部材を用いることもできる。
【0031】
上記のように、支持部70a,70bにそれぞれ角度センサ90a,90bが設けられる。角度センサ90aは、ハウジング80に対する支持部70aの回動軸82a周りの回動角度を検出し、同様に角度センサ90bは、ハウジング80に対する支持部70bの回動軸82b周りの回動角度を検出する。ハウジング80に対する各支持部70a,70bの回動角度から、2個の支持部間の離反角度θabを求めることができる。
【0032】
図4に示すように、スリット付円板92aにより、回動軸82a近傍の内部が2分される。スリット付円板92aの片側の空間にはコイルばね84aが収納され、もう片側の空間には、超音波振動子72aからの信号線77aが収納される。信号線77aは、スリット付円板92aの片側の専用空間を通り、角度センサ90aの信号線とともに信号ケーブル48を構成し、本体部50に接続される。
【0033】
図5は、他の角度センサ91aの例として、磁気式エンコーダを示したものである。磁気式エンコーダは、例えば、円周の一部に磁石チップが取り付けられた円板96aと、磁気検出器98aとから構成することができる。円板96aは回動軸82aに固定され、磁気検出器98aは支持部70aに固定される。この構成において、支持部70aが回動軸82a周りに回動すると、円板96aが磁気検出器98aに対し相対的に回動し、その回動角度は、円板96aに取り付けられた磁石チップと磁気検出器98aとの相対関係で検出できる。磁気検出器として例えばMR(磁気抵抗)素子等を用いることができる。
【0034】
再び図1に戻り、上記構成のプローブ40の生体組織16に対する作用について説明する。図1において、まずトラカール20aにプローブ40を挿入する。挿入に際しては、外筒の後端部である操作部60を操作してプローブ40の先端部に設けられた2個の支持部70の離反角度を最初にして「すぼめ」た状態にして行う。次にトラカール20bに挿入された内視鏡を用い、体腔14内における生体組織16である胆のうについておよその位置を特定する。そして、内視鏡を見ながら、トラカール20aに挿入したプローブ40の先端部に設けられた2個の支持部70を生体組織16である胆のうに近づける。ついで操作部60を操作して、2個の支持部70の離反角度を大きくして「広げ」、プローブ40全体をトラカール20aに沿ってさらに押し込み、2個の支持部70を生体組織16である胆のうに接触させる。
【0035】
図6は、プローブ40の先端近傍の様子を拡大断面図で示したものである。超音波振動子72が生体組織16に接触させた状態において、本体部50の制御により超音波振動子72から超音波を送信し、生体組織16からのエコー信号を処理して断層画像を得る。この断層画像を観察しながら結石等の患部18を特定し、穿刺針42を2個の支持部70の間から突き出す。超音波振動子72から送信される超音波は穿刺針42からも反射されるので、そのエコー信号を処理して穿刺針42の断層画像を得る。したがって、生体組織16と穿刺針42の双方の断層画像を観察しながら患部18に対し的確な穿刺を行うことができる。
【0036】
図7は、複数の超音波振動子を用いた超音波診断装置30の信号処理系についてのブロック図である。超音波診断装置30は、プローブ40において2個の超音波振動子72a,72bと、角度センサ90a,90bを備える。各超音波振動子72a,72bと各角度センサ90a,90bは、信号ケーブルで本体部50と接続される。
【0037】
本体部50において、送信部302a,302bは、各超音波振動子72a,72b内部に設けられるアレイ振動子の各チャネルごとに遅延された送信信号を供給する機能を有するものである。受信部304a,304bは、各超音波振動子72a,72bからのエコー信号を増幅し、各チャネル間の受信信号の位相差を調整する整相加算等の処理を行い、受信信号として信号処理部308a,308bに出力する回路である。
【0038】
送受信制御部306は、各送信部302a,302b、各受信部304a,304bを制御する機能を有する。また、各支持部の回動角度に応じて、各超音波振動子72a,72bの超音波の送受信方向を制御することもできる。
【0039】
図8は、各超音波振動子の超音波の送受信方向を偏向させる制御を行う様子を示す図である。図において、各支持部70a,70bの回動角度が十分大きいとき、各超音波振動子72a,72bの超音波の送受信方向を送受信面に垂直方向fa,fbとすると、超音波振動子が配置されない部分に対応して超音波の送受信が行われない不感応領域Xができる。上記のように、穿刺針42は、各支持部70a,70bの間、より正確には、各支持部70a,70bがハウジング80に回動自在に係合されるその係合中心を通って突き出るので、不感応領域にあり、そのままでは穿刺針42に対して超音波の送受信が行われない。そこで、各超音波振動子72a,72bの超音波の送受信方向を制御し、不感応領域Xに向けてfa‘,fb’と偏向させる。
【0040】
このように、複数の支持部を組み合わせたとき、離反角度によっては、回動軸の周辺から穿刺針や診断対象部位に対し超音波の送受信を行うことが難しく、その部分が超音波画像を形成できない不感応領域となることがおこるが、各超音波振動子の送受信方向を不感応領域に向けて偏向させることで、不感応領域をなくし、穿刺針42及び診断対象部位に対し超音波の送受信を行うことができる。したがって、離反角度によらず不感応領域をなくし、広い超音波送受信開口を確保し、広い範囲にわたり、穿刺針42及び診断対象部位の情報を確実に得ることができる。
【0041】
信号処理部308a,308bは、例えばBモード信号処理を行うときは、超音波ビームについて各受信部304a,304bから出力される整相加算後の受信信号に基づき、エコー信号の包絡振幅を抽出する検波、包絡振幅信号の対数圧縮等の処理を行う機能を有する。Bモード信号処理のほか、必要に応じドプラ信号処理の機能を含ませることもできる。
【0042】
画像処理部310は、信号処理部308a,308bと接続され、例えばBモード信号処理出力に対し座標変換やデータ補間等の処理を行ってBモード断層画像を形成する機能を有する。画像処理の結果は表示部312に出力される。
【0043】
画像処理には、各超音波振動子72a,72bからの各受信信号をそれぞれ信号処理し、画像処理して複数の断層画像を形成するほかに、各超音波振動子72a,72bからの各受信信号に基づいて合成超音波画像を形成することができる。各超音波振動子の超音波の送受信方向は、送受信制御部306の制御信号と、各角度センサ90a,90bが出力する各支持部の回動角度から特定できるので、超音波診断対象に対する複数の超音波の送受信がそれぞれ求められ、その受信信号を合成することで、診断対象につきシャドウの少ない画像形成を行うことができる。また、穿刺針42についてもシャドウの少ない画像形成を行うことができる。
【0044】
例えば、図6に戻って説明すると、この場合の各支持部70a,70bの回動角度においては、生体組織16内の患部18の観察位置Pは、支持部70aの超音波振動子72aの送受信方向faと、支持部70bの超音波振動子72bの送受信方向fbとの2方向が交差する。すなわち、観察位置Pについて、超音波振動子72aの超音波の送受信により、図において右斜め上からの情報を得ることができ、超音波振動子72bの超音波の送受信により、左斜め上からの情報を得ることができる。この2方向からのエコー信号を信号処理し、画像形成において超音波画像を合成することで、穿刺針42からみて患部18の裏側にあたる観察位置Pについてもシャドウの少ない良質の画像を得ることができる。
【0045】
上記説明においてプローブの構成は、支持部の数を2個とし、各支持部の離反角度は外筒の操作により行うものとしたが、それ以外の機構を有するプローブを用いることもできる。
【0046】
図9は、支持部の数を3個または4個とするプローブ140の例を示す図である。このプローブ140は、先端に3個の支持部170a,170b,170cを有するハウジング180と、ハウジング180の外周に沿って摺動可能な外筒186とから構成される。3個の支持部170a,170b,170cは、ハウジング180に設けられた回動軸182a,182b,182cに回動自在に係合される。また、外筒86に設けられたリンク支軸183a,183b,183cと、各支持部170a,170b,170cの支持面の裏面174a,174b,174cにそれぞれ設けられたリンク支軸173a,173b,173cとの間は、それぞれリンク部材184a,184b,184cにより接続される。
【0047】
上記構成において、外筒186をハウジング180の外周に沿って動かすことで、リンク部材184a,184b,184cを介し各支持部170a,170b,170cを回動軸182a,182b,182cまわりに回動させることができる。したがって、外筒186をハウジング180に沿って摺動させる操作量に応じて、各支持部170a,170b,170cの離反角度を変化させることができる。
【0048】
すなわち、外筒186の後端部が操作部としての機能を有し、外筒186とリンク部材184a,184b,184cとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。図9(a)は、外筒186を支持部170a,170b,170c側に動かして離反角度を小さくし「すぼめ」た状態、(b)は、外筒186を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。
【0049】
上記構成と同様な構成でさらに支持部の数を4個に増加させ、外筒をハウジングに沿って摺動させる操作量に応じて、4個の支持部の離反角度を変化させることもできる。
【0050】
図10は、外筒を用いず、可変機構をハウジングの内部に収容するプローブ240の例を示す図である。このプローブ240は、ハウジング280を備え、ハウジング280に設けられた回動軸282a,282bに2個の支持部270a,270bが回動自在に係合され、ハウジング280内部に、ハウジング280の内周に沿って摺動可能な内筒286が配置される。そして、内筒286に設けられたリンク支軸283a,283bと、各支持部270a,270bにそれぞれ設けられたリンク支軸273a,273bとの間は、それぞれリンク部材284a,284bにより接続される。各リンク支軸273a,273bとそれに対応する各回動軸282a,282bとの距離はできるだけ離すことが望ましい。内筒286の長さは、トラカールにプローブ240が挿入されたとき、内筒286の後端部が、トラカールの後端側から生体の外部に延伸する程度の長さに設定される。
【0051】
上記構成において、内筒286をハウジング280の内周に沿って動かすことで、リンク部材284a,284bを介し各支持部270a,270bを回動軸282a,282bまわりに回動させることができる。したがって、内筒286をハウジング280に沿って摺動させる操作量に応じて、各支持部270a,270bの離反角度を変化させることができる。
【0052】
すなわち、内筒286の後端部が操作部としての機能を有し、内筒286とリンク部材284a,284bとが、操作部の操作量に応じて離反角度を変化させる可変機構としての機能を有する。図10(a)は、内筒286を支持部270a,270b側から遠ざける方向に動かして離反角度を小さくし「すぼめ」た状態、(b)は、内筒286を(a)とは反対側に動かして離反角度を大きくし「広げ」た状態を示す。
【0053】
また、図10において、プローブ240の先端側にシール部材290を装着することができる。すなわち、可変機構はハウジング280の内部に収容されるので、伸縮性を有し、機械的強度が高い材料、例えばフッ素ゴムやEPDM(エチレンプロピレンジエンモノマー)素材をシール部材290として用い、ハウジング280の先端部及び各支持部270a,270bの回動軸282a,282b周辺を被覆し、ゴムバンド292でしっかり封止する。なお、シール部材290において、穿刺の際に穿刺針42の通る部分には開口部が設けられるが、例えば内径が伸縮自在の案内穴部材等を有する開口部として、穿刺針42に対してもシールを行うことができる。このことで、体腔内の生体組織を可変機構によって汚染することを防止し、また、可変機構が生体組織により汚染されることも防止できる。また、プローブの使用後の洗浄、滅菌処理が容易となる。
【0054】
内筒の代わりに、ハウジングの内部に2個の操作部材を設け、その端部にそれぞれリンク支軸を設けて、リンク部材を介して各支持部に設けられたリンク支軸と接続することでも、図10のプローブと同様の作用を得ることができる。
【0055】
【発明の効果】
本発明に係る超音波診断装置によれば、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、超音波送受信の開口を広くすることができる。本発明に係る超音波診断装置によれば、トラカールを通して体腔内に超音波振動子とともに穿刺針を挿入する超音波診断装置において、穿刺針の超音波画像の画質を向上させることができる。
【図面の簡単な説明】
【図1】本発明に係る実施の形態の超音波診断装置を用いて、生体の体腔内の生体組織を観察する様子を示した図である。
【図2】本発明に係る実施の形態の超音波診断装置におけるプローブの概略図である。
【図3】コイルばねが現れる側から見たプローブ先端の部分断面図である。
【図4】図3におけるA−A線に沿った支持部の断面図である。
【図5】他の実施の形態の角度センサの例を示す図である。
【図6】プローブの先端近傍の様子を拡大断面図で示したものである。
【図7】本発明に係る実施の形態の超音波診断装置の信号処理系についてのブロック図である。
【図8】各超音波振動子の超音波の送受信方向を偏向させる制御を行う様子を示す図である。
【図9】他の実施の形態のプローブの例を示す図である。
【図10】他の実施の形態のプローブの例を示す図である。
【図11】従来の超音波振動子と穿刺針との関係の例を示す図である。
【符号の説明】
10 生体、12 腹壁、14 体腔、16 生体組織、18 患部、20,20a,20b,20c トラカール、30 超音波診断装置、40,140,240 プローブ、42 穿刺針、48 信号ケーブル、50 本体部、60 操作部、70,70a,70b,170a,170b,170c,270a,270b 支持部、72,72a,72b 超音波振動子、80,180,280ハウジング、82a,82b,182a,182b,182c,270a,270b 回動軸、86,186 外筒、90a,90b,91a 角度センサ、184a,184b,184c,284a,284b リンク部材、286 内筒、290 シール部材、302a,302b 送信部、304a,304b 受信部、306 送受信制御部、308a,308b 信号処理部、310 画像処理部、312 表示部。
Claims (3)
- トラカールを通して生体の体腔内に挿入されるプローブと、本体部とを含む超音波診断装置において、
前記プローブは、
超音波を送受信する超音波振動子と、
前記超音波振動子を支持面に支持する複数の支持部であって、前記トラカールにプローブが挿入されたときに前記トラカールの挿入先端側から前記体腔内に露出し、相互に離反して広がり広径化し、前記超音波振動子を超音波の照射対象に臨ませる複数の支持部と、
前記トラカールにプローブが挿入されたときに前記トラカールの後端側から前記生体の外部に延伸する操作部と、
前記複数の支持部の間を通り前記超音波の照射領域に突出する穿刺針と、
前記操作部の操作量に応じて前記各支持部の離反量を変化させる可変機構と、
を備え、
前記本体部は、
前記超音波の送受信を制御する送受信制御部と、
前記複数の超音波振動子の各出力信号に基づき、前記穿刺針の合成超音波画像を形成する画像処理部と、
を備えることを特徴とする超音波診断装置。 - 請求項1に記載の超音波診断装置において、
前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、
前記可変機構は、前記操作部の操作量に応じて、前記各支持部の間の離反角度を変化させるものであり、
前記送受信制御部は、前記離反角度に応じて形成される前記穿刺針に対する不感応領域に向けて、各超音波振動子の前記超音波の送受信方向を偏向させる制御を行うことを特徴とする超音波診断装置。 - 請求項1に記載の超音波診断装置において、
前記各支持部は、前記プローブの先端に設けられた回動軸に回動自在に係合するものであり、
前記可変機構は、前記操作部の操作量に応じて、前記各支持部の回動角度を変化させるものであり、
前記各支持部の回動角度を検出する角度センサを含み、
前記画像処理部は、
前記角度センサにより検出された各回動角度に基づき、前記各超音波振動子の前記超音波の送受信方向を特定し、前記穿刺針の同一観察位置に対する複数方向からの受信信号に基づき、合成超音波画像を形成することを特徴とする超音波診断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002338448A JP2004167094A (ja) | 2002-11-21 | 2002-11-21 | 超音波診断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002338448A JP2004167094A (ja) | 2002-11-21 | 2002-11-21 | 超音波診断装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004167094A true JP2004167094A (ja) | 2004-06-17 |
Family
ID=32701678
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002338448A Pending JP2004167094A (ja) | 2002-11-21 | 2002-11-21 | 超音波診断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004167094A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016163395A1 (ja) * | 2015-04-06 | 2016-10-13 | SonoCore株式会社 | 超音波診断治療装置および超音波診断治療方法 |
| JP2018029645A (ja) * | 2016-08-22 | 2018-03-01 | セイコーエプソン株式会社 | 超音波デバイス及び超音波測定装置 |
| EP3387982A4 (en) * | 2015-12-07 | 2019-07-24 | Kyocera Corporation | TROCART AND OPTICAL SYSTEM OF LOW HEIGHT TYPE LENS |
-
2002
- 2002-11-21 JP JP2002338448A patent/JP2004167094A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016163395A1 (ja) * | 2015-04-06 | 2016-10-13 | SonoCore株式会社 | 超音波診断治療装置および超音波診断治療方法 |
| EP3387982A4 (en) * | 2015-12-07 | 2019-07-24 | Kyocera Corporation | TROCART AND OPTICAL SYSTEM OF LOW HEIGHT TYPE LENS |
| US11083489B2 (en) | 2015-12-07 | 2021-08-10 | Kyocera Corporation | Trocar with deployable camera |
| JP2018029645A (ja) * | 2016-08-22 | 2018-03-01 | セイコーエプソン株式会社 | 超音波デバイス及び超音波測定装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004167092A (ja) | 超音波診断装置 | |
| JP3042629B2 (ja) | 使捨て可能な腔内用超音波装置 | |
| CA1304493C (en) | Endoscopically deliverable ultrasound imaging system | |
| EP2298175B1 (en) | Three-dimensional probe apparatus | |
| JP4590293B2 (ja) | 超音波観測装置 | |
| JP4815621B2 (ja) | 超音波プローブ及び超音波診断装置 | |
| JP2001340334A (ja) | 穿刺針案内具、超音波プローブおよび超音波撮影装置 | |
| JPH08117237A (ja) | 超音波診断装置 | |
| EP2039297B9 (en) | Ultrasound diagnostic apparatus | |
| JP2005528951A (ja) | 超音波画像カテーテル組立体 | |
| US6277066B1 (en) | Endocavity imaging sensor positioning apparatus and method | |
| US8568324B2 (en) | Systems and methods for mechanical translation of full matrix array | |
| JPH07231894A (ja) | 超音波診断治療システム | |
| JP2004167094A (ja) | 超音波診断装置 | |
| JP2004135693A (ja) | 超音波振動子、超音波内視鏡、及び超音波診断装置 | |
| US20070232921A1 (en) | Transducer assembly having a wide field of view | |
| JP3333595B2 (ja) | 超音波診断装置 | |
| JPS5922534A (ja) | 超音波診断可能な内視鏡 | |
| JP4817359B2 (ja) | 超音波診断装置 | |
| JP6790235B2 (ja) | 光音響画像生成装置 | |
| JPH1133028A (ja) | 超音波診断装置用穿刺システム | |
| JP3410770B2 (ja) | 超音波診断装置 | |
| JPH11206778A (ja) | 体腔内超音波プローブ | |
| JP4838449B2 (ja) | 超音波診断装置 | |
| JP6665315B2 (ja) | 同期光音響及び超音波引戻し技法を使用した組織及び血管経路マッピング |