JP2004100184A - ドア開閉制御装置および方法 - Google Patents
ドア開閉制御装置および方法 Download PDFInfo
- Publication number
- JP2004100184A JP2004100184A JP2002260896A JP2002260896A JP2004100184A JP 2004100184 A JP2004100184 A JP 2004100184A JP 2002260896 A JP2002260896 A JP 2002260896A JP 2002260896 A JP2002260896 A JP 2002260896A JP 2004100184 A JP2004100184 A JP 2004100184A
- Authority
- JP
- Japan
- Prior art keywords
- door
- unit
- acquisition
- light receiving
- result
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Power-Operated Mechanisms For Wings (AREA)
Abstract
【解決手段】光電センサ15乃至17の発光部41,51,61から発生された光が、異物に反射して光電センサ15乃至17の受光部42,52,62により受光されると、マイクロコンピュータ24は異物が検出されたと判定する。発光部41,51,61から発生された光が、異物に遮られ、光電センサ18乃至20の受光部71乃至73により受光されない場合にも、マイクロコンピュータ24は異物が検出されたと判定する。異物を検出するとマイクロコンピュータ24はモータ13の回転を停止し、ドアの移動を停止する。本発明は、電動スライドドアに適用することができる。
【選択図】 図2
Description
【発明の属する技術分野】
本発明はドア開閉制御装置および方法に関し、例えば、自動車の電動スライドドアの開閉制御に用いて好適なドア開閉制御装置および方法に関する。
【0002】
【従来の技術】
ワゴンやバン、又はレクリエーションビークル等の自動車では、ドアを車体の前後方向に沿ってスライドして開閉する所謂スライドドアが採用されているものがある。
【0003】
また、このようなスライドドアには、モータの駆動力によりその開閉操作を自動化するドア開閉制御装置が採用されているものもある。
【0004】
ところで従来のドア開閉制御装置は、ドアを閉じるときに異物を挟み込んだことを検出するために、例えば、図1に示すようにドア1の端面1Aに接触式センサ2を設け、接触式センサ2に物体が接触した場合、異物を挟み込んだものと判定し、ドアの移動を制御することが提案されている(例えば、特許文献1参照)。
【0005】
【特許文献1】
特開2002−4714号公報(図1)
【0006】
【発明が解決しようとする課題】
しかしながら、特許文献1では、接触式センサ2に物体が接触した場合、異物を挟み込んだものと判断し、ドアの動作を停止させるため、ドアに接触しないと異物を検出することができないという課題があった。このため、身体の一部が挟み込まれた場合、痛みやケガが生じるおそれがあるという課題があった。
【0007】
本発明はこのような状況に鑑みてなされたものであり、ドアに接触する前に異物を検出できるようにするものである。
【0008】
【課題を解決するための手段】
本発明のドア開閉制御装置は、可動するドアに設けられた発光部が発生した光の、ドアに設けられた第1の受光部による検出結果を取得する第1の取得手段と、発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果を取得する第2の取得手段と、可動するドアの位置を検出する検出手段と、第1の取得手段により取得された第1の取得結果、第2の取得手段により取得された第2の取得結果、および検出手段により検出されたドアの位置に基づいてドアの移動を制御する制御手段とを備えることを特徴とする。
【0009】
本発明のドア開閉制御装置においては、可動するドアに設けられた発光部が発生した光の、ドアに設けられた第1の受光部による検出結果が取得されるとともに、発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果が取得される。可動する前記ドアの位置が検出され、取得された第1の取得結果、取得された第2の取得結果、および検出されたドアの位置に基づいて、ドアの移動が制御される。
【0010】
したがって、ドアに異物が接触しなくても、確実に異物を検出することができる。また、異物が検出された場合、ドアの移動を停止するように制御することができる。その結果、使用者がケガをするおそれが少なくなる。
【0011】
第1の取得手段、第2の取得手段、検出手段、および制御手段は、例えばマイクロコンピュータが所定のプログラムを実行することで実現される。
【0012】
発光部は、例えば、光を出射する発光ダイオードにより構成される。第1の受光部と第2の受光部は、ホトダイオード、ホトトランジスタ等のホトセンサにより構成される。発光部と第1の受光部は、光電センサとして一体化することができる。
【0013】
ドアの端面の位置が、基準面から、予め設定された距離より離れているか否かを判定する第1の距離判定手段と、第1の距離判定手段による判定結果に基づいて選択された、第1の取得結果または第2の取得結果の一方と、所定の基準値とを比較する比較手段とをさらに備え、制御手段は、比較手段の比較結果に基づいてドアの移動を制御することができる。
【0014】
これにより、誤動作の発生を抑制することができる。
【0015】
第1の距離判定手段および比較手段は、例えばプログラムを実行するマイクロコンピュータにより実現される。
【0016】
学習モード時に、ドアの位置が、基準面から、予め設定された距離よりはなれているか否かを判定する第2の距離判定手段と、第2の距離判定手段の判定結果に基づいて、発光部が発生した光の、第1の受光部による検出結果を取得する第3の取得手段と、第2の距離判定手段の判定結果に基づいて、発光部が発生した光の、第2の受光部による検出結果を取得する第4の取得手段と、第3の取得手段と第4の取得手段により取得された検出結果を記憶する記憶手段とをさらに備え、比較手段は、記憶手段に記憶された第3の取得手段と第4の取得手段により取得された検出結果に対応する値を基準値として、第1の取得結果または第2の取得結果と比較するようにすることができる。
【0017】
これにより、ドアの位置に対応した、所定の基準値を得ることができる。その結果、各装置毎のバラツキに拘わらず、正確な検出が可能となる。
【0018】
第2の判定手段、第3の取得手段、第4の取得手段は、例えばプログラムを実行するマイクロコンピュータにより実現される。記憶手段は、例えばEEPROMにより構成される。記憶手段は、この他、ハードディスクなど、電源オフ時においてもデータを保持することが可能な記憶部により構成することができる。
【0019】
診断モード時に、第1の受光部による検出結果、および第2の受光部による検出結果が、予め設定された所定の範囲を超えるか否かを判定する範囲判定手段と、範囲判定手段の判定に基づいて警告を提示する提示手段とをさらに備えるようにすることができる。
【0020】
これにより、装置に故障があるか否かを自己診断することができる。また、装置に故障があった場合、ユーザに警告することができる。
【0021】
第3の判定手段および提示手段は、例えば、プログラムを実行するマイクロコンピュータにより実現される。
【0022】
本発明のドア開閉制御方法は、可動するドアに設けられた発光部が発生した光の、ドアに設けられた第1の受光部による検出結果を取得する第1の取得ステップと、発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果を取得する第2の取得ステップと、可動するドアの位置を検出する検出ステップと、第1の取得手段ステップの処理により取得された第1の取得結果、第2の取得ステップの処理により取得された第2の取得結果、および検出ステップの処理により検出されたドアの位置に基づいてドアの移動を制御する制御ステップとを含むことを特徴とする。
【0023】
本発明のドア開閉制御方法においては、可動するドアに設けられた発光部が発生した光の、ドアに設けられた第1の受光部による検出結果が取得されるとともに、発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果が取得される。さらに、可動するドアの位置が検出され、取得された第1の取得結果、取得された第2の取得結果、および検出されたドアの位置に基づいて、ドアの移動が制御される。
【0024】
したがって、本発明のドア開閉制御装置における場合と同様に、誤動作することなく、確実に異物を検出することができる。また、異物が検出された場合、ドアの移動を制御することができる。
【0025】
第1の取得ステップは、例えば第1の受光部からの信号をマイクロコンピュータにより取得する取得ステップにより構成され、第2の取得ステップは、例えば第2の受光部からの信号をマイクロコンピュータにより取得する取得ステップにより構成される。また検出ステップは、例えば、ドアの移動に連動して発生されるパルス信号をマイクロコンピュータによりカウントし、ドアの位置を検出する検出ステップにより構成され、制御ステップは、ドアを駆動するモータをマイクロコンピュータにより制御する制御ステップにより構成される。
【0026】
【発明の実施の形態】
以下に、本発明の実施の形態について図面を参照して説明する。図2は、本発明を適用したドア開閉制御装置を含むシステムの一実施の形態の構成を示している。同図に示されるように、このシステムにおいては、ドアを移動させるモータ13、モータ13の回転に連動してパルスを出力するエンコーダ12、ドアが完全に閉まったことを検出するドア閉スイッチ14、ドア側に取り付けられた光電センサ15乃至17、並びに車体側に取り付けられた光電センサ18乃至20が、ドア開閉制御装置11と接続されている。
【0027】
ドア開閉制御装置11には、情報を記憶するメモリ21、モータの駆動を制御するI/Oインタフェース部22、ドア開閉制御装置に学習モード処理を実行させるとき使用者により操作される学習モードスイッチ23、光電センサ15乃至17を駆動するI/Oインタフェース部25、光電センサ15乃至20から入力されるアナログ信号をディジタル信号に変換するA/D変換部26、並びに、プログラムに基づいて、各種の処理を実行するマイクロコンピュータ24が設けられている。
【0028】
マイクロコンピュータ24はエンコーダ12から出力されるパルスをカウントすることにより、モータ13がどれだけ回転したのかを認識し、そのカウント値に基づいてドアの移動位置を認識する。マイクロコンピュータ24は、A/D変換部26から入力される信号に基づき、ドアと車体の間に異物があることを検出する。また、I/Oインタフェース部22に信号を出力することにより、モータ13を駆動し、I/Oインタフェース部25を介して光電センサ15乃至17の発光部41,51,61を駆動する。
【0029】
マイクロコンピュータ24には、光電センサ15乃至20から出力された信号の値と、エンコーダ12から出力されたモータの回転に同期して発生されたパルスのカウント値(または、それに基づいて、生成されたドアの移動位置を表す位置データ)を記憶するEEPROM(Electrically Erasable and Programmable Read Only Memory)31が内蔵されている。
【0030】
ドア側の光電センサ15には、発光部41と受光部42とが設けられている。同様に、光電センサ16には、発光部51と受光部52が設けられており、光電センサ17には、発光部61と受光部62が設けられている。
【0031】
また、車体側の光電センサ18乃至20には、それぞれ受光部71乃至73が設けられている。
【0032】
即ち、発光部はドア側にのみ設けられ、受光部はドア側と固定側の両方に設けられている。
【0033】
図3は、ドア閉スイッチ14、および光電センサ15乃至20の取り付け位置の例を示している。この例では、ドア閉スイッチ14は、車体92の基準面92A上の上部に取り付けられている。基準面92Aはドア91が車体92に対して移動し、閉じられたとき、ドア91の端面91Aと当接する固定側の面である。ドア91が完全に閉まったとき(端面91Aが基準面92Aと当接したとき)、ドア閉スイッチ14はオンの状態になり、ドア91が少しでも開いたとき、オフの状態となる。
【0034】
光電センサ15乃至17は可動するドア91の端面91Aに、垂直方向に所定の距離だけ相互に離れた位置に取り付けられている。この例の場合、最も上側に光電センサ15が取り付けられ、最も下側に光電センサ17が取り付けられ、その中間に、光電センサ16が取り付けられている。
【0035】
一方、車体側の光電センサ18乃至20は、車体92の基準面92Aに垂直方向に、所定の距離だけ離れた位置に取り付けられている。光電センサ18は、光電センサ15とほぼ同じ高さに、光電センサ19は光電センサ16とほぼ同じ高さに、光電センサ20は光電センサ17とほぼ同じ高さにそれぞれ配置されている。
【0036】
このように光電センサ15乃至20をドア91の垂直方向に複数個配置することで、異物がドア91のどの高さに位置しても正確に検出することができる。
【0037】
この例では、光電センサ15乃至17が異物を検出することができる範囲は、ドア91の端面91Aから10cmまでの範囲とされ、光電センサ18乃至20が異物を検出できる範囲は車体92の基準面92Aから10cmまでの範囲とされる。
【0038】
即ちドア91の端面91Aから10cmまでの範囲内に異物が存在する場合、発光部41,51,61から発せられた光が異物に反射し、光電センサ15乃至17の受光部42,52,62により受光される。異物が存在しないか、存在したとしても、異物までの距離が10cm以上になると、反射光が受光部42,52,62に戻ってこないか、または、戻ってきても、その光量が少ないので、受光部42,52,62は、異物を検出することができない。
【0039】
また、ドア91が図3Aの矢印Fの方向に移動して、ドア91の端面91Aが車体92の基準面92Aから10cm以下の距離まで近づいた場合、発光部41,51,61から発せられた光は、光電センサ18乃至20の受光部71乃至73により受光される。このときの受光量は充分大きい。従ってドア91の端面91Aと車体92の基準面92Aとの間に異物が存在すると、発光部41,51,61から発せられた光が異物によって遮られ、受光量が減るので、異物が検出される。
【0040】
異物が存在しないか、存在したとしても、ドア91の端面91Aが車体92の基準面92Aから10cm以上離れている場合には、受光量が充分でないので、異物の有無を検出できない。
【0041】
この例では、モータ13が停止した後、慣性によってドア91が移動する距離を10cmとして、光電センサが異物を検出できる範囲を10cmに設定しているが、モータ13が停止した後、慣性によってドア91が移動する距離は、モータ13の特性やドア91の駆動機構などにより変動するので、モータ13の特性やドア91の駆動機構などに応じて、光電センサが異物を検出できる範囲を変更してもよい。
【0042】
次に図4のフローチャートを参照してドア91を閉める場合の処理について説明する。この処理は使用者により図示せぬドア閉スイッチが操作されたとき開始される。
【0043】
ステップS1において、マイクロコンピュータ24は、I/Oインタフェース部22を介してモータ13を駆動し、ドア91が閉まる方向(図3Aにおける矢印Fの方向)に回転さる。モータ13が回転するとエンコーダ12は、これに同期してパルスを発生する。そこで次にステップ2において、マイクロコンピュータ24は、エンコーダ12から出力されたパルスを取得し、ステップS3において、パルスをカウントし、ドア91の位置を検出する。即ち、ドア91が開放された位置(図3Aにおいて矢印Rで示す方向の移動端点)から矢印Fで示す方向に移動すると、その移動位置は、パルスのカウント値に対応するので、カウント値からドア91の移動位置を検出することができる。 ステップS4に進み、マイクロコンピュータ24は、I/Oインタフェース部25を介して光電センサ15乃至17の発光部41,51,61を駆動し、発光させる。
【0044】
ステップS5において、マイクロコンピュータ24は、ドア91の端面91Aが車体92の基準面92Aから10cm以上離れているか否か(パルスのカウント値が、10cmに対応する値(EEPROM31に予め記憶されている)より大きくなったか否か)を判定し、10cm以上離れていると判定した場合、ステップS6に進み、ドア側の光電センサ15乃至17の受光部42,52,62からの信号を取得する。そしてステップS7に進み、マイクロコンピュータ24は、ステップS6で取得した信号の値(受光レベル)を、現在のドア位置での基準値(受光レベル)と比較する。この基準値は、後述する図5のフローチャートに示される学習処理により学習された値に対応している。
【0045】
その後ステップS8に進み、マイクロコンピュータ24は、ステップS7で比較した結果、ステップS6で取得した信号の値が基準値以上であるか否かを判定し、基準値以上ではないと判定された場合、即ち異物が検出されなかった場合、ステップS1に戻り、それ以降の処理を繰り返し実行する。
【0046】
これに対して、ドア91の端面91Aから10cm以内の距離に異物が存在する場合、異物により反射された光が受光部42,52,62の少なくともいずれか1つに入射する。その結果、受光部42,52,62の出力の少なくともいずれか1つは、基準値より大きくなる。そこで、ステップS8において、ステップS6の処理で取得した信号の値が基準値以上と判定された場合、マイクロコンピュータ24は、異物が検出されたと判定し、ステップS13に進み、モータ13を停止させる。
【0047】
モータ13の駆動の停止を指令してからドア91は約10cmさらに移動する。しかしながら、光電センサ15乃至17は、ドア91の端面91Aから約10cm離れた位置の異物を検出しているので、ドア91は異物(使用者)に接触しないで停止する。勿論、異物が10cm以内に存在する場合は、ドア91が異物に接触するが、ドア91は制動中であるため、異物に大きな衝撃が与えられるおそれは少なくなる。
【0048】
一方、ステップS5において、ドア91の端面91Aが、車体92の基準面92Aから10cm以上離れていない、即ちドア91の端面91Aが車体92の基準面92Aから10cm未満の距離にある、と判定された場合、マイクロコンピュータ24はステップS9に進み、それまでのドア側の光電センサ15乃至17に代えて、車体側光電センサ18乃至20の受光部71乃至73からの信号を取得する。すなわち、センサがドア91側から車体92側に切り換えられる。そしてステップS10に進み、マイクロコンピュータ24は、ステップS9で取得した信号の値を現在のドア位置での基準値(この基準値はステップS7における基準値とは一般的には異なる基準値である)と比較する。
【0049】
マイクロコンピュータ24は、ステップS11において、ステップS10で比較した結果、ステップS9で取得した信号の値が基準値以下であるか否かを判定する。ステップS9で取得した信号の値が基準値以下ではないと判定された場合、即ち異物が検出されなかった場合、マイクロコンピュータ24は、ステップS12に進み、ドア閉スイッチ14がオンの状態か否かを判定する。オンの状態ではないと判定された場合(ドア91がまだ完全に閉まっていない状態の場合)、ステップS1に戻り、それ以降の処理が繰り返し実行される。
【0050】
ステップS12においてドア閉スイッチ14がオンの状態であると判定された場合、即ち異物が検出されず、ドア91が完全に閉まり切った場合、マイクロコンピュータ24は、ステップS13に進み、モータ13を停止させる。
【0051】
ステップS11において、ステップS9で取得した信号の値が基準値以下であると判定された場合、即ち異物が検出された場合、マイクロコンピュータ24は、ステップS13に進みモータ13を停止する。
【0052】
即ち、異物が存在しなければ、発行部41,51,61からの光が大きなレベルで受光部71乃至73により受光される。これに対して、異物が存在する場合、光が異物により遮られるので、受光部71乃至73のうちの少なくとも1つの出力は、基準値より小さくなる。このときモータ13は停止される。
【0053】
このようにして、ドア91を閉める方向(図3Aの矢印Fで示す方向)に移動させているときに、車体92とドア91の間に異物が存在すると、異物がドア91に接触する前にドア91の移動を停止させることができる。
【0054】
車体側の受光部71乃至73を省略した場合、ドア91の端面91Aと、車体92の基準面92Aが接近したとき、ドア側の光電センサ15乃至17の受光部42,52,62が受光した光が、異物に反射して受光されたものなのか、または車体92の基準面92Aに反射して受光されたものなのかの識別が困難になる。
【0055】
このため、本発明ではドア91の端面91Aと車体92の基準面92Aとの距離が、10cm未満になった場合、発光部41,51,61が発生した光が、異物に反射してドア側の光電センサ15乃至17の受光部42,52,62に受光されたか否かを検知することによる異物の検出方法を、発光部41,51,61が発生した光が、車体側の光電センサ18乃至20の受光部71乃至73に、異物に遮られることなく届いたか否かを検知することによる異物の検出方法に切り換える。これによりドア91の端面91Aと車体92の基準面92Aが接近していても、ドア開閉制御装置は、誤動作することなく異物を検出し、ドアの移動を制御することができる。
【0056】
ドア91側の発光部41,51,61からの光を、車体92側の受光部71乃至73だけで受光し、光が遮られたとき異物を検出するようにすると、間に異物が存在しても、太陽光、その他の外乱光が受光部71乃至73により受光され、異物を検出できないおそれがある。そこで、本発明においては、ドア91側と、車体92側のそれぞれに受光部を設け、それぞれの側の受光部により異物からの反射光を受光することで異物が検出され。これにより、外乱光による誤動作が抑制される。
【0057】
次に図5のフローチャートおよび図6のフローチャートを参照して、学習モード処理について説明する。この処理は、図2の学習モードスイッチ23が使用者によりオンされたとき開始される。
【0058】
ステップS31においてマイクロプロセッサ24は、モータ13をドア91が開く方向(図3Aにおいて、矢印Rで示す方向)に回転させ、ステップS32に進み、エンコーダ12からのパルスを取得する。そして、ステップS33に進み、マイクロコンピュータ24は、パルスをカウントし、ドア91の位置を検出する。
【0059】
ステップS34においてマイクロコンピュータ24はドア91の位置が全開の状態であるか否かを判定し、全開の状態ではないと判定された場合、ステップS31に戻り、それ以降の処理を繰り返し実行する。
【0060】
ステップS34において、ドア91の位置が全開の状態であると判定された場合(ドア91が開方向の基準位置に達したと判定された場合)、マイクロコンピュータ24は、ステップS35に進み、モータ13を停止させる。そして、ステップS36に進み、マイクロコンピュータ24は、発光部41,51,61を駆動し、発光させ、ステップS37に進み、モータ13をドア91が閉まる方向(図3Aにおいて矢印Fで示される方向)に回転させる。ステップS38に進み、マイクロコンピュータ24は、エンコーダ12からのパルスを取得し、ステップS39において、パルスをカウントし、ドア91の位置を検出する。
【0061】
ステップS40において、マイクロコンピュータ24は、ドア91の端面91Aが、車体92の基準面92Aから10cm以上離れているか否かを判定し、10cm以上離れていると判定された場合、ステップS41に進み、ドア側の光電センサ15乃至17の受光部42,52,62からの検出信号を取得する。
【0062】
ステップS40において、ドア91の端面91Aが、車体92の基準面92Aから10cm以上離れていない、即ちドア91の端面91Aが、車体92の基準面92Aから10cm未満の距離にあると判定された場合、マイクロコンピュータ24はステップS42に進み、車体側光電センサ18乃至20の受光部71乃至73からの検出信号を取得する。
【0063】
ステップS41またはステップS42の処理の後、ステップS43において、マイクロコンピュータ24は、ステップS39で検出したドア91の現在位置に対応させて、ステップS41またはステップS42で取得した検出信号の値(受光レベル)を、EEPROM31に記憶する。ここで記憶した値、または、その値に所定の重み付けをするなどして得られた値が、上述した基準値となる。即ち、ステップS41で得られた検出信号に対応する値が、図4のステップS8における基準値とされ、ステップS42で得られた検出信号に対応する値が、図4のステップS11における基準値とされる。
【0064】
ステップS44において、マイクロコンピュータ24は、ドア閉スイッチ14がオンの状態か否かを判定し、ドア閉スイッチ14がオンの状態ではないと判定された場合、ステップS37に戻り、それ以降の処理を繰り返し実行する。
【0065】
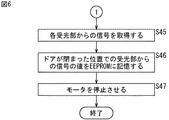
ステップS44において、ドア閉スイッチ14がオンの状態であると判定された場合、即ち、ドアが完全に閉まり切った場合、マイクロコンピュータ24は、ステップS45において、ドア側の光電センサ15乃至17の受光部42,52,62、および車体側の光電センサ18乃至20の受光部71乃至73から検出信号を取得する。そして、ステップS46に進み、マイクロコンピュータ24は、ステップS45で取得した信号の値をドアが閉まった位置での検出信号値として記憶する。ここで記憶した値は、後述する図7の診断モード処理で使用される。
【0066】
このようにして、ドア91と車体92の間に異物が存在しない場合、ドア91の位置の変化に応じてドア側の光電センサ15乃至17の受光部42,52,62からの検出信号の値、または車体側の光電センサ18乃至20の受光部71乃至73からの信号の値がどう変化するのかを、ドア開閉制御装置11に予め記憶させることができる。
【0067】
また、ドア91を閉めるときにステップS43で記憶した(学習した)基準値と、ドア側の光電センサ15乃至17の受光部42,52,62または車体側の光電センサ18乃至20の受光部71乃至73から取得された信号の値とを比較することにより、ドア開閉制御装置11は、誤動作することなく異物を検出し、ドアの移動を制御することができる。
【0068】
次に、図7のフローチャートを参照して、診断モード処理について説明する。この処理は、使用者が図示せぬ入力部を操作することで自己診断を指令したとき開始される。
【0069】
ステップS61においてマイクロコンピュータ24は、ドア閉スイッチ14がオンの状態か否かを判定し、オンの状態であると判定された場合、即ちドアが完全に閉まり切っていると判定された場合、ステップS62に進み、発光部41,51,61を駆動し、発光させる。そして、ステップS63に進み、マイクロコンピュータ24は、ドア側の光電センサ15乃至17の受光部42,52,62からの検出信号、および車体側の光電センサ18乃至20の受光部71乃至73からの検出信号を取得する。
【0070】
ステップS64において、マイクロコンピュータ24は、ドア側の光電センサ15乃至17の受光部42,52,62から取得した検出信号の値、および車体側の光電センサ18乃至20の受光部71乃至73から取得した検出信号の値が、正常な値の範囲内であるか否かを判定する。
【0071】
ドアが完全に閉まり切った状態であれば、ドア91と車体92の間に異物が存在する可能性は極めて低い。そこで、ドア側の光電センサの受光部42,52,62、および車体側の光電センサの受光部71乃至73から取得した検出信号の値が、図6のフローチャートのステップS46で記憶した基準値と大きく異っている場合、正常な値の範囲内ではないと判定される。
【0072】
ステップS64において、正常な値の範囲内ではないと判定された場合、マイクロコンピュータ24は、ステップS65に進み、警告音を鳴したり、警告ランプを点灯するなどして、警告を提示する。
【0073】
ステップS64で、各受光部からの検出信号の値と基準値との差が所定の範囲内であるとき、マイクロコンピュータ24は、装置は正常であると判定して、警告を提示せずに処理を終了する。
【0074】
ステップS61において、ドア閉スイッチ14がオンの状態ではない(ドア91が開いている)と判定された場合、診断モード処理は実行されない。
【0075】
このようにして、ドア開閉制御装置の故障の有無を確認することができる。また、故障があった場合、ユーザに警告することができる。
【0076】
なお、本明細書において上述した一連の処理を実行するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0077】
以上においては、電動スライドドアの開閉を制御する場合を例として説明したが、パワーウィンドウ、電動式サンルーフ、その他のドアの開閉を制御する場合にも、本発明は適用することが可能である。
【0078】
【発明の効果】
以上の如く、本発明によれば、ドアが異物に接触することなくドアの移動を制御させることが可能なドア開閉制御装置を実現することができる。特に、小型で、取り付けが容易なドア開閉制御装置を実現することが可能となる。
【図面の簡単な説明】
【図1】従来のドア開閉制御装置の構成例を示す図である。
【図2】本発明を適用したドア開閉制御装置の一実施の形態の構成を示すブロック図である。
【図3】図2の光電センサの取り付け位置を示す図である。
【図4】図2のドア開閉制御装置のドアを閉める処理を説明するフローチャートである。
【図5】図2のドア開閉制御装置の学習モード処理を説明するフローチャートである。
【図6】図2のドア開閉制御装置の学習モード処理を説明するフローチャートである。
【図7】図2のドア開閉制御装置の診断モード処理を説明する図である。
【符号の説明】
11 ドア開閉制御装置
12 エンコーダ
13 モータ
15乃至20 光電センサ
24 マイクロコンピュータ
31 EEPROM
41,51,61 発光部
42,52,62 受光部
71乃至73 受光部
Claims (5)
- ドアの開閉を制御するドア開閉制御装置において、
可動するドアに設けられた発光部が発生した光の、前記ドアに設けられた第1の受光部による検出結果を取得する第1の取得手段と、
前記発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果を取得する第2の取得手段と、
可動する前記ドアの位置を検出する検出手段と、
前記第1の取得手段により取得された第1の取得結果、前記第2の取得手段により取得された第2の取得結果、および前記検出手段により検出された前記ドアの位置に基づいて、前記ドアの移動を制御する制御手段と
を備えることを特徴とするドア開閉制御装置。 - 前記ドアの端面の位置が、前記基準面から、予め設定された距離より離れているか否かを判定する第1の距離判定手段と、
前記第1の距離判定手段による判定結果に基づいて選択された、前記第1の取得結果または前記第2の取得結果の一方と、所定の基準値とを比較する比較手段と
をさらに備え、
前記制御手段は、前記比較手段の比較結果に基づいて前記ドアの移動を制御する
ことを特徴とする請求項1に記載のドア開閉制御装置。 - 学習モード時に、前記ドアの位置が、前記基準面から、予め設定された距離より離れているか否かを判定する第2の距離判定手段と、
前記第2の距離判定手段の判定結果に基づいて、前記発光部が発生した光の、前記第1の受光部による検出結果を取得する第3の取得手段と、
前記第2の距離判定手段の判定結果に基づいて、前記発光部が発生した光の、前記第2の受光部による検出結果を取得する第4の取得手段と、
前記第3の取得手段と前記第4の取得手段により取得された検出結果を記憶する記憶手段と
をさらに備え、
前記比較手段は、前記記憶手段に記憶された前記第3の取得手段と前記第4の取得手段により取得された検出結果に対応する値を前記基準値として、前記第1の取得結果または前記第2の取得結果と比較する
ことを特徴とする請求項2に記載のドア開閉制御装置。 - 診断モード時に、前記第1の受光部による検出結果、および前記第2の受光部による検出結果が、予め設定された所定の範囲を超えるか否かを判定する範囲判定手段と、
前記範囲判定手段の判定に基づいて警告を提示する提示手段と
をさらに備えることを特徴とする請求項2または3に記載のドア開閉制御装置。 - ドアの開閉を制御するドア開閉制御装置の開閉制御方法において、
可動するドアに設けられた発光部が発生した光の、前記ドアに設けられた第1の受光部による検出結果を取得する第1の取得ステップと、
前記発光部が発生した光の、固定された基準面に設けられた第2の受光部による検出結果を取得する第2の取得ステップと、
可動する前記ドアの位置を検出する検出ステップと、
前記第1の取得手段ステップの処理により取得された第1の取得結果、前記第2の取得ステップの処理により取得された第2の取得結果、および前記検出ステップの処理により検出された前記ドアの位置に基づいて、前記ドアの移動を制御する制御ステップと
を含むことを特徴とするドア開閉制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002260896A JP3846712B2 (ja) | 2002-09-06 | 2002-09-06 | ドア開閉制御装置および方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002260896A JP3846712B2 (ja) | 2002-09-06 | 2002-09-06 | ドア開閉制御装置および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004100184A true JP2004100184A (ja) | 2004-04-02 |
| JP3846712B2 JP3846712B2 (ja) | 2006-11-15 |
Family
ID=32261410
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002260896A Expired - Fee Related JP3846712B2 (ja) | 2002-09-06 | 2002-09-06 | ドア開閉制御装置および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3846712B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006316564A (ja) * | 2005-05-16 | 2006-11-24 | Shiroki Corp | 安全装置 |
| JP2008106476A (ja) * | 2006-10-24 | 2008-05-08 | Nabtesco Corp | 自動ドア装置用センサ及びこのセンサを用いた自動ドア装置 |
| WO2019043769A1 (ja) * | 2017-08-29 | 2019-03-07 | 河西工業株式会社 | テールゲート開閉装置 |
| US10589716B2 (en) | 2014-03-26 | 2020-03-17 | Magna Mirrors Of America, Inc. | Vehicle function control system using sensing and icon display module |
-
2002
- 2002-09-06 JP JP2002260896A patent/JP3846712B2/ja not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006316564A (ja) * | 2005-05-16 | 2006-11-24 | Shiroki Corp | 安全装置 |
| JP2008106476A (ja) * | 2006-10-24 | 2008-05-08 | Nabtesco Corp | 自動ドア装置用センサ及びこのセンサを用いた自動ドア装置 |
| US8258455B2 (en) | 2006-10-24 | 2012-09-04 | Nabtesco Corporation | Automatic door system with sensor used therein |
| US10589716B2 (en) | 2014-03-26 | 2020-03-17 | Magna Mirrors Of America, Inc. | Vehicle function control system using sensing and icon display module |
| US10889265B2 (en) | 2014-03-26 | 2021-01-12 | Magna Mirrors Of America, Inc. | Vehicle function control system using sensing and icon display module |
| US11427156B2 (en) | 2014-03-26 | 2022-08-30 | Magna Mirrors Of America, Inc. | Vehicular function control using sensing device with backlit icons |
| WO2019043769A1 (ja) * | 2017-08-29 | 2019-03-07 | 河西工業株式会社 | テールゲート開閉装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3846712B2 (ja) | 2006-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7770327B2 (en) | Power window system and method for controlling power-operated window | |
| US7309971B2 (en) | Opening and closing body control device | |
| US7573216B2 (en) | Window opening and closing controller | |
| US5081586A (en) | Multiplexing of accessories in a vehicle | |
| JP2004506110A (ja) | 非接触センサを有する乗物閉止はさみ防止組立体 | |
| US7015669B2 (en) | Drive apparatus for opening/closing body for vehicle | |
| KR20150016954A (ko) | 자동차의 폐쇄 부재 장치를 제어하기 위한 방법 | |
| JP2005351042A (ja) | 開閉体制御装置 | |
| JPH11190168A (ja) | 自動開閉装置 | |
| US7843153B2 (en) | Control system for controlling an adjusting device operated by electric motor in a motor vehicle | |
| GB2498833A (en) | Ultrasonic gesture recognition for vehicle | |
| US9267318B2 (en) | Method and apparatus for providing an indication of movement, particularly for recognition of blocking in a locking system | |
| JP4372233B2 (ja) | スライド・チルト式のサンルーフ装置を制御するための方法および装置 | |
| JP2007023585A (ja) | 車両用自動開閉装置 | |
| US20030222610A1 (en) | Motor speed-based anti-pinch control apparatus and method with endzone ramp detection and compensation | |
| US6972536B2 (en) | Closure member control device and method for limiting positional deviation of closure member | |
| US6633148B1 (en) | Drive device and method for moving a vehicle part | |
| JP3846712B2 (ja) | ドア開閉制御装置および方法 | |
| JP3846713B2 (ja) | ドア開閉制御装置および方法 | |
| JP3675622B2 (ja) | パワーウインド装置の挟み込み検知方法 | |
| KR20220024928A (ko) | 안티-핀치 검출 방법 및 시스템 | |
| US7764036B2 (en) | Sliding member controller | |
| JP5186747B2 (ja) | 物体接触検知装置 | |
| JP2007224685A (ja) | 開閉制御装置及び開閉制御の設定方法 | |
| US20240117664A1 (en) | Opening and closing body control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060518 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060817 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090901 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100901 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100901 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100901 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |