EP4161861B1 - Dispositif pour la fermeture des récipients - Google Patents
Dispositif pour la fermeture des récipients Download PDFInfo
- Publication number
- EP4161861B1 EP4161861B1 EP21728485.0A EP21728485A EP4161861B1 EP 4161861 B1 EP4161861 B1 EP 4161861B1 EP 21728485 A EP21728485 A EP 21728485A EP 4161861 B1 EP4161861 B1 EP 4161861B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- container
- closing
- main body
- holding
- guidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007789 sealing Methods 0.000 claims description 14
- 238000000926 separation method Methods 0.000 claims description 5
- 230000001105 regulatory effect Effects 0.000 claims description 4
- 238000005461 lubrication Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000000314 lubricant Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 235000013361 beverage Nutrition 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 239000007799 cork Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004519 grease Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- -1 polyethylene terephthalate Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/02—Closing bottles, jars or similar containers by applying caps by applying flanged caps, e.g. crown caps, and securing by deformation of flanges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/2013—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps by carousel-type capping machines
- B67B3/2033—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps by carousel-type capping machines comprising carousel co-rotating capping heads
Definitions
- the invention relates to a device for closing containers or the like according to the preamble of claim 1.
- Container treatment machines in the form of devices for closing containers are well known from the prior art in various designs and are also referred to as container closing machines or seamers.
- Such a device according to the preamble of claim 1 is from US 2,987,313 A known. Further closing devices are shown here US 3,309,838 A and the DE 195 23 659 C1 .
- the present invention relates in particular to a device such as that which is used in the beverage industry and preferably has an output of more than 10,000 containers per hour, particularly preferably an output of 50,000 containers per hour.
- cappers are used, for example, in beverage bottling systems and are usually arranged in the immediate vicinity of a corresponding filling station or filling machine in its direct connection, so that the freshly filled containers can be closed immediately after filling.
- Closing devices of the type mentioned can be designed for closing bottles or other containers with screw caps or as so-called crown caps for closing bottles with corresponding crown caps as a container closure.
- closing devices of a rotating design in which several container closing positions are formed on the circumference of a rotor driven around a vertical machine axis or central axis.
- Each container closing position is assigned a closing element, which can also be understood as a closing tool or a closing stamp.
- closing elements or closing tools of such closing devices can be moved axially between a raised and a lowered position along a vertical closing element axis by means of a lifting movement, this axial lifting movement also being understood as a delivery stroke.
- This delivery stroke is usually generated by lifting curves, which are intended to control the height of the closing elements.
- Examples of closing machines with stroke cam-controlled closing elements are from the DE 10 2017 112 218 B3 or from the WO 2010/118806 A2 known.
- cappers are also known from the prior art, which generate the delivery stroke for each capping station separately by means of a drive motor that can be operated in a controlled and / or regulated manner, as is the case, for example, in the publication DE 10 2007 057 857 A1 has become known.
- the closing elements When height is controlled by means of lifting cams, the closing elements are positively guided in the lifting cam, with the closing elements usually having connected rollers or rollers that run in a forced-guided manner on a guide surface of the lifting cam.
- lubrication or roller lubrication in particular an application of lubricant, takes place in the area of the rollers and/or the guide surface of the lifting cam, since dry running of the rollers on lifting cams is currently not possible.
- a closing tool arranged on a closing element applies a considerable force to the respective container closure, as a result of which the respective container closure is first brought into a sealing position with the container mouth that tightly closes the container interior from the environment. The container closure is then elastically and/or plastically deformed by the acting force in such a way that the closure retains the sealing effect even after the effect of the force has ended.
- the closing element is pulled vertically upwards, whereby the closing tool is also separated from the container that has just been closed.
- the container does not move together with the upwardly moving closing tool during separation, but remains essentially unchanged in height - i.e. fixed in position - in the position it already held during closing.
- replaceable guide elements which act on or on at least one shoulder of the respective container and thus prevent vertical movement of the container when it is separated from the respective container and the closing tool - i.e. hold it in a fixed position.
- the guide elements Since these guide elements interact directly with the shoulder of the respective container, the guide elements must be adapted very precisely to the outer contour of the container, which necessarily means that these guide elements when changing the container type or container format - to a different container with different external Dimensions - usually need to be replaced.
- the object of the invention to provide a device for closing containers in which the guide elements can be easily adapted to different container types and/or container formats.
- the invention relates to a device of a rotating type for closing containers or the like, having a plurality of closing stations arranged on the circumference of a gyroscope which can be driven in a motor-driven rotation around a vertical central axis of the device for closing the containers with a container closure, the gyro rotating in a rotating manner a stationary central column extending along the vertical machine axis is arranged, the closing stations rotating around the central column each having at least one lowering and lifting closing element and a container carrier provided below the respective closing element, which is used to hold a respective container in a standing and/or hanging manner is provided all around on the central column.
- the present invention is characterized in particular in that at least one guiding and holding device is provided with at least two guide elements adapted to different container formats, which are rotatably arranged on the circumference of a base body of the guiding and holding device in such a way that at least one guide element is at least during the separation of the closure element from the container closed with a container closure can be brought into an engaged position with its respective container shoulder, while the at least one further guide element is in a non-engaged position.
- the base body is designed to be rotatable through a defined angle of rotation in such a way that a guide element adapted to the container format to be processed can be brought from a non-engaged position into an engaged position.
- the holding and guiding device is provided in an angular range between a container inlet and a container outlet of the device, in which the respective closing element is removed from a container closed with a container closure.
- the angular range viewed in the transport direction, extends over the last 40% of the entire container treatment route between the container inlet and the container outlet.
- the guiding and holding device has a holding element, by means of which the guiding and holding device is arranged in a stationary manner on the device.
- the base body is star-shaped and has at least two guide elements adapted to the outer container geometry of the container shoulder on the circumference.
- the plurality of guide elements are distributed at uniform or approximately uniform angular distances on the circumference of the base body.
- the base body is arranged to be rotatable by a motor about an axis A.
- the base body is connected to the axle in a rotationally fixed manner in the region of a first free end of the axle, while the axle is rotatably mounted on the holding element at its second free end opposite the first free end.
- the guiding and holding device for a motor-assisted rotation of the base body has a stall drive, by means of which a regulated and/or controlled angular position of the base body can be approached.
- the actuator is designed as a stepper motor, in particular as a servo motor.
- the guiding and holding device has a locking device by means of which the base body can be held in a rotation-proof manner in defined rotation angle positions.
- containers are understood to mean any container, in particular bottles, cans, cups, etc., each made of metal, glass and/or plastic, preferably made of PET (polyethylene terephthalate).
- a “revolving type sealing machine” is a sealing machine with a rotating transport element, preferably a rotor, and with sealing stations formed on the transport element for sealing the containers or the like.
- the expression “essentially” or “approximately” means deviations from the exact value by +/- 10%, preferably by +/- 5% and/or deviations in the form of changes that are insignificant for the function.
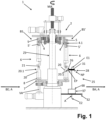
- the device designated 1 is a closing device or closing machine of rotating design for closing containers 20 such as bottles or the like with a crown cap and / or screw cap as a container closure 21.
- a closing device with a container closure 21 in the form of a so-called crown cork (cf. Figure 1 ) for example from the publication going back to the applicant DE 10 2018 124 874 A1 , or as a closing device with a container closure 21 designed as a screw cap (cf. Figure 2 ) from which also goes back to the applicant DE 10 2017 112 218 B3 or the DE 10 2013 101 716 A1 .
- closing device 1 designed as a crown corker as an example.
- the invention can also be applied or used on a closing device for a screw cap as a container closure 21, without departing from the idea underlying the present invention.
- FIG. 1 a special embodiment variant of a closing machine 1 according to the invention is shown merely as an example, with only a few components of the entire closing machine 1, namely components, for reasons of clarity. which are relevant for the description of the present invention, are explained explicitly and in Figure 1 are provided with reference numbers. For reasons of clarity, further components and elements of the closing machine 1 that are not particularly important in connection with the invention will not be discussed in more detail here, but rather by reference to relevant text passages in the publications DE 10 2018 124 874A1 , DE 10 2017 112 218 B3 or DE 10 2013 101 716 A1 referred.
- a filling machine (not shown in detail in the figures) is provided upstream for filling the containers 20 with a liquid filling material in spatial proximity.
- the containers 20 filled by the filling machine are transported to the closing machine 1 via transport devices, for example conveyor belts, and are transferred to the actual closing machine 1 on the input side at a container inlet BE by transfer elements (also not shown in detail, for example an inlet star).
- the containers 20 then closed in this way are at a container outlet BA on the output side of the closing machine 1 by another, not shown and in the treatment direction A on the closing machine 1 subsequently provided transfer element, for example an outlet star, is taken over and transported away in a manner known to those skilled in the art.
- transfer element for example an outlet star
- the closing device 1 has a stationary central column ZS extending along a vertical central axis MA, on which at least one motor-driven gyroscope 2 is provided, which rotates in a motor-driven manner in a direction of rotation indicated by the rounded double arrow.
- Each closing station BS, BS' each has at least one closing element 6, which extends along its length along a respective vertically oriented closing element axis VA.
- the closing elements 6 are each designed to be movable up and down.
- the closing elements 6 can be moved axially between a raised and a lowered position, namely up and down in the vertical direction, when the gyroscope 2 rotates, for example by means of a lifting movement.
- the closing element 6 in Figure 1 The closing station BS shown assumes the raised position and that of the one in Figure 1
- the closing station BS shown on the right is in its lowered position.
- the axial lifting movement is also understood as a delivery stroke and forms a height control of the closing elements 6.
- a lifting curve 4 can be provided for this height control, by means of which the closing elements 6 are positively guided around the central axis MA.
- the closing elements 6 have a roller 5 on the top side, namely at their upper end, which runs on a guide surface 4a of the lifting curve 4.
- the roller 5 therefore interacts via its running surface 5a with the guide surface 4a of the lifting cam 4, which in the sense of the present invention is seen as the roller 5 running along the guide surface 4a of the lifting cam 4 but also as the roller 5 sliding along the guide surface 4a Lift curve 4 can be understood.
- lubrication in particular an application of lubricant, such as grease, is provided in the area of the lifting curve 4 and the roller 5 to facilitate running or sliding of the roller 5 .
- lubricant such as grease
- the axial lifting movement of the closing elements 6 along the closing element axis VA for their height control takes place during the rotation of the closing elements 6 around the central axis MA due to the positive guidance of the rollers 5 in the lifting cam 4 and is therefore referred to in the present case as a lifting cam-controlled height adjustment or as a lifting cam height control.
- the lifting curve 4 of the exemplary closing device 1 has a substantially L-shaped cross section with a horizontal and a vertical leg, the horizontally oriented leg forming or providing the guide surface 4a.
- the vertical extent varies over the circumference of the lifting curve 4, in particular a length of the vertical leg, which has the shortest length in the closing station BS shown and the greatest length in the closing station BS ⁇ .
- An outer circumference 4.1 of the lifting curve 4 is defined by the approximately vertically oriented end face of the horizontally oriented leg, which also forms the outer, in particular radially outer, circumferential surface and therefore specifies the outer diameter of the lifting curve 4.
- a further roller 5 ' is also provided, which is opposite the roller 5 with respect to the guide surface 4a of the lifting cam 4 and engages the horizontal leg of the lifting cam 4 on the underside.
- the respective container carrier 8 can be standing (cf. Figure 1 ) or hanging bracket (cf. Figure 2 ) of the respective container 20 can be formed at the closing station BS, BS ⁇ .
- a hanging bracket can be used, for example, as in the publication DE 10 2017 112 218 B3 , or the DE 10 2007 057 857 A1 described, realized.
- the respective container carrier 8 is in turn provided or arranged so that it can rotate and move on a motor-driven support ring 7 that can be driven around the central column 4.
- a motor-driven support ring 7 that can be driven around the central column 4.
- the closing movement i.e. the mutual pressing of the container 20 with the container closure 21, for example, only the container 20 can be lifted over the container carrier 8.
- the container 20 can be raised via the container carrier 8 and the closing element 6 can also be lowered at the same time or with a time delay.
- the container 20 can also be held in a fixed position with the container carrier 8 and only the closing element 6 can be lowered.
- At least one guiding and holding device 25 is provided with at least two guide elements 26... 30, each adapted to different container formats or container types, which are rotatably arranged on the circumference of a base body 31 of the guiding and holding device 25 in such a way that at least one Guide element 26 can be brought into an engagement position EP with its respective container shoulder 20.1 at least during the separation of the closure element 6 from the container 20 closed with a container closure 21, while the at least one further guide element 27...30 is in a non-engagement position NP.
- At least one guide element 26...30 in the respective engagement position EP is at least partially in contact with the respective container shoulder 20.1 of the associated container 20 with its guide surface 26.1, 30.1 facing the container 20.
- the respective guide surface 26.1...30.1 of the guide elements 26...30 is adapted to different geometric container formats.
- the respective guide surface 26.1...30.1 is adapted to the geometric shape of the respective container shoulder 20.1 of a corresponding container format or container type.
- the closing element 6 is pulled vertically upwards, whereby the closing tool is also separated from the container 20 that has just been closed.
- the holding and guiding device 25 is provided in an angular range of the closing machine 1 in which the respective closing element 6 is removed from the container 20 closed with a container closure 21, i.e. has just been separated.
- this angular range viewed in the transport direction A, is provided over approximately 0-30, preferably over 5-15% of the entire container treatment distance between the container inlet BE and the container outlet, specifically opposite the transport direction A and in front of the container outlet BA.
- the angular range extends over approximately the last 40% of the container treatment section between the container inlet BE and the container outlet BA.
- the holding and guiding device 25 can be provided, in particular arranged, in a stationary manner on the closing machine 1.
- the holding and guiding device 25 can have a holding element 32, for example a holding plate, by means of which the holding and guiding device 25 is firmly but releasably connected, in particular arranged, on the closing machine 1.
- the holding and guiding device 25 does not run together with the rotating gyroscope 2 of the closing machine 1, but always remains in the same angular range of the closing machine 1.
- the holding element 32 can be arranged on the periphery of the rotating gyroscope 2, for example the hall floor, or on the locking device 1 itself, for example on the foot or foundation ring of the locking device 1.
- the holding element 32 is particularly advantageously arranged on the central column ZS.
- the holding and guiding device 25 can rotate with the gyroscope 2, i.e. to rotate with it.
- the holding and guiding device 25 can be arranged on the support ring 7 and/or gyroscope 2 by means of its holding element 32.
- the base body 31 can be star-shaped and have at least two guide elements 26...30 adapted to the outer container geometry of the container shoulder 20.1 on the circumference.
- four guide elements 26...30 can be provided on the base body 31, which are each arranged at approximately 90° angular distances from one another on the circumference of the base body 31, preferably evenly distributed.
- the opposite guide surfaces 26.1 and 28.1 or 27.1 and 30.1 of the respective associated guide elements 26 and 28 or 27 and 30 can be provided pointing away from one another.
- the base body 31 of the guiding and holding device 25 can be arranged on a motor-rotatable axis A.
- the motor-rotatable axis A can be oriented in its longitudinal extent parallel to the machine axis MA or the closing element axis VA.
- the base body 31 is arranged in a rotationally fixed manner in the area of a first free end E1 of the axis A, while the axis A is rotatably mounted, in particular received, on the holding element 32 at its second free end E2 opposite the first free end E1.
- the guiding and holding device 25 can have a stall drive 37, by means of which a regulated and / or controlled angular position of the base body 31 can be approached.
- the actuator 37 can be a stepper motor, in particular a servo motor, which has a rotary angle sensor.
- the guiding and holding device 25 can have a locking device 38, by means of which the base body 31 can be held in a rotation-proof manner in defined rotation angle positions in order to avoid unintentional angular adjustment of the base body 31 and/or to achieve precise compliance with the target angle.
- the base body 31 can be rotated by a specific angle of rotation, preferably by a rotation angle of less than 360°, preferably by a rotation angle of approximately 90°, so that a specific guide element 26...30, which is adapted to the container format now to be processed, can be rotated from a non-engagement position NP into the engagement position EP.
- the remaining guide elements 26... 30 present on the base body 31 are then in a non-intervention or waiting position NP. If a different container format is now to be processed, only the base body 31 has to be rotated again by a predefined angle of rotation in order to bring another guide element 26...30 from its non-engaged position NP into the engaged position EP.
- the base body 31 can therefore be designed to be rotatable by a defined angle of rotation in such a way that a guide element 26...30 adapted to the container format to be processed is rotated from a non-engagement position NP into an engagement position EP.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Sealing Of Jars (AREA)
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
Claims (13)
- Dispositif de type rotatif destiné à fermer des contenants (20) ou similaires, présentant plusieurs stations de fermeture (BS, BS') disposées sur la périphérie d'un gyroscope (2) pouvant être entraîné en rotation de manière motorisée autour d'un axe médian vertical (MA) du dispositif (1), destinées à fermer les contenants (20) avec une fermeture de contenant (21), dans lequel le gyroscope (2) est disposé en rotation sur une colonne centrale (ZS) s'étendant le long de l'axe de machine (MA) vertical et stationnaire, dans lequel les stations de fermeture (BS, BS') tournant autour de la colonne centrale (ZS) présentent respectivement au moins un élément de fermeture (6) mobile en abaissement et en levage ainsi qu'un support de contenant (8) prévu sous l'élément de fermeture (6) respectif, qui est prévu de manière entraînée en rotation sur la colonne centrale (4) pour maintenir en position debout ou en suspension un contenant (20) respectif, caractérisé en ce qu'au moins un dispositif de guidage et de maintien (25) est prévu avec au moins deux éléments de guidage (26...30) adaptés à respectivement différents formats de contenant, qui sont disposés de manière à pouvoir tourner sur la périphérie d'un corps de base (31) du dispositif de guidage et de maintien (25) de telle manière qu'au moins un élément de guidage (26...30) peut être amené dans une position de prise (EP) au moins pendant la séparation de l'élément de fermeture (6) du contenant (20) fermé avec une fermeture de contenant (21) par son épaulement de contenant (2.1) respectif, tandis que l'au moins un autre élément de guidage (26...30) se trouve dans une position de non prise (NP).
- Dispositif selon la revendication 1, caractérisé en ce qu'en fonction d'un format de contenant prédéfini, le corps de base (31) est réalisé de manière à pouvoir tourner autour d'un angle de rotation défini de telle manière qu'un élément de guidage (26...30) adapté au format de contenant à traiter peut être amené depuis une position de non prise (NP) dans une position de prise (EP).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le dispositif de maintien et de guidage (25) est prévu dans une plage angulaire entre une entrée de contenant (BE) et une sortie de contenant (BA) du dispositif (1), dans laquelle l'élément de fermeture (6) respectif est retiré d'un contenant (20) fermé avec une fermeture de contenant (21).
- Dispositif selon la revendication 3, caractérisé en ce que la plage angulaire s'étend vue dans la direction de transport (A) sur les derniers 40 % de la totalité du trajet de traitement de contenant entre l'entrée de contenant (BE) et la sortie de contenant (BA).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le dispositif de guidage et de maintien (25) présente un élément de maintien (32), au moyen duquel le dispositif de guidage et de maintien (25) est disposé de manière stationnaire sur le dispositif (1).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le corps de base (31) est réalisé en forme d'étoile et présente sur la périphérie les au moins deux éléments de guidage (26...30) adaptés à la géométrie de contenant externe de l'épaulement de contenant (20.1).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que les plusieurs éléments de guidage (26...30) sont prévus de manière répartie sur la périphérie du corps de base (31) à des espacements angulaires homogènes ou approximativement homogènes.
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que trois, quatre éléments de guidage (26...30) ou plus sont prévus.
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le corps de base (31) est disposé de manière à pouvoir tourner de manière motorisée autour d'un axe A.
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le corps de base (31) est relié de manière solidaire en rotation à l'axe (A) dans la zone d'une première extrémité libre (E1) de l'axe (A), tandis que l'axe (A) est prévu sur l'élément de maintien (32) avec un montage solidaire en rotation sur sa seconde extrémité libre (E2) faisant face à la première extrémité libre (E1).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le dispositif de guidage et de maintien (25) présente un entraînement de réglage (37) pour une rotation assistée par moteur du corps de base (31), qui permet d'accéder à une position angulaire, régulée et/ou commandée du corps de base (31).
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que l'entraînement de réglage (37) est réalisé en tant qu'un moteur pas à pas, en particulier en tant qu'un servomoteur.
- Dispositif selon l'une quelconque des revendications précédentes, caractérisé en ce que le dispositif de guidage et de maintien (25) présente un système de verrouillage (38), qui permet de maintenir de manière antigiratoire le corps de base (31) dans des positions d'angle de rotation définies.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SI202130129T SI4161861T1 (sl) | 2020-06-04 | 2021-05-19 | Naprava za zapiranje vsebnikov |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020114806.2A DE102020114806B3 (de) | 2020-06-04 | 2020-06-04 | Vorrichtung zum Verschließen von Behältern |
| PCT/EP2021/063225 WO2021244849A1 (fr) | 2020-06-04 | 2021-05-19 | Dispositif de fermeture hermétique de contenants |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4161861A1 EP4161861A1 (fr) | 2023-04-12 |
| EP4161861B1 true EP4161861B1 (fr) | 2024-03-13 |
Family
ID=76181090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21728485.0A Active EP4161861B1 (fr) | 2020-06-04 | 2021-05-19 | Dispositif pour la fermeture des récipients |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4161861B1 (fr) |
| DE (1) | DE102020114806B3 (fr) |
| SI (1) | SI4161861T1 (fr) |
| WO (1) | WO2021244849A1 (fr) |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2987313A (en) * | 1957-05-28 | 1961-06-06 | Owens Illinois Glass Co | Bottle holder |
| US3309838A (en) * | 1964-04-17 | 1967-03-21 | Horix Mfg Company | Capping machine |
| DE19523659C1 (de) * | 1995-06-29 | 1996-09-26 | Edmund Buscher | Haltevorrichtung für Behältnisse |
| DE102007057857A1 (de) * | 2007-11-29 | 2009-06-04 | Khs Ag | Vorrichtung zum Verschließen von Behältern |
| DE102009017109A1 (de) * | 2009-04-15 | 2010-10-28 | Khs Gmbh | Verschließer für Schraubkappen bzw. -verschlüsse |
| DE102013101716A1 (de) * | 2013-02-21 | 2014-08-21 | Khs Gmbh | Verschließelement zum Verschließen von Behältern sowie Verschließmaschine mit derartigen Verschließelementen |
| DE102017112218B3 (de) * | 2017-06-02 | 2018-08-09 | Khs Gmbh | Verschließmaschine umlaufender Bauart |
| DE102018124874A1 (de) * | 2018-10-09 | 2020-04-09 | Khs Gmbh | Vorrichtung zum Befüllen und Verschließen von Behältern |
-
2020
- 2020-06-04 DE DE102020114806.2A patent/DE102020114806B3/de active Active
-
2021
- 2021-05-19 EP EP21728485.0A patent/EP4161861B1/fr active Active
- 2021-05-19 WO PCT/EP2021/063225 patent/WO2021244849A1/fr unknown
- 2021-05-19 SI SI202130129T patent/SI4161861T1/sl unknown
Also Published As
| Publication number | Publication date |
|---|---|
| SI4161861T1 (sl) | 2024-05-31 |
| EP4161861A1 (fr) | 2023-04-12 |
| DE102020114806B3 (de) | 2021-07-01 |
| WO2021244849A1 (fr) | 2021-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2217523B1 (fr) | Dispositif de fermeture de contenants | |
| EP0535512B1 (fr) | Procédé et dispositif pour imprimer des articles au moins partiellement coniques | |
| EP2332867B1 (fr) | Dispositif et procédé de transport de récipients dotés d'un guidage inférieur | |
| DE2722254C3 (de) | Flaschenverschließmaschine umlaufender Bauart | |
| EP0290649B1 (fr) | Dispositif pour remplir en particulier d'une substance liquide ou solide coulante un récipient, plus particulièrement des fûts, fermés avec un bouchon fileté ou un bouchon de fermeture formé d'une autre façon | |
| WO2013123953A1 (fr) | Procédé d'étiquetage de contenants et machine à étiqueter | |
| EP2653435B1 (fr) | Dispositif destiné à fermer des récipients | |
| EP3595999B1 (fr) | Capsuleuse | |
| EP1630125B1 (fr) | Dispositif de bouchage de bouteille ou similaire | |
| EP0281660B1 (fr) | Dispositif de remplissage de récipients clos par des bouchons filetés ou des bouchons d'un autre caractère en particulier de fûts, en particulier avec une matière liquide ou solide fluide | |
| EP0145640A2 (fr) | Dispositif pour appliquer des étiquettes sur des récipients ronds | |
| EP4161861B1 (fr) | Dispositif pour la fermeture des récipients | |
| EP0180706A2 (fr) | Dispositif de transport | |
| EP3140240B1 (fr) | Procédé d'operation d'une station de bouchage et station de bouchage | |
| DE102015224973A1 (de) | Behälterbehandlungsmaschine | |
| DE3626008A1 (de) | Vorrichtung zum verschliessen von flaschen | |
| WO2021160437A1 (fr) | Appareil de manipulation de récipients | |
| EP0849215B1 (fr) | Dispositif pour dévisser et trier des capsules de récipients | |
| DE3908582A1 (de) | Vorrichtung zum verschliessen von flaschen | |
| AT526279B1 (de) | Verfahren zum Fördern und Orientieren von Ausgießelementen mit Verschluss und Fördervorrichtung | |
| WO2017005458A1 (fr) | Système de guidage de récipients dans une machine de traitement de récipients | |
| EP3966153A1 (fr) | Dispositif de fermeture pour la fermeture de récipients | |
| WO2013013752A1 (fr) | Dispositif de fermeture de récipients | |
| DE10011913A1 (de) | Verschließeinrichtung zum Verschließen von Behältern, insbesondere von Flaschen | |
| DE2713888A1 (de) | Vorrichtung zum ausfuehren von arbeitsschritten an gegenstaenden von vorbestimmter hoehe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20230104 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B67B 3/02 20060101ALI20231110BHEP Ipc: B67B 3/20 20060101AFI20231110BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20231127 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502021002989 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240521 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240614 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240613 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240613 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240613 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240614 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240531 Year of fee payment: 4 Ref country code: FR Payment date: 20240527 Year of fee payment: 4 Ref country code: SI Payment date: 20240510 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240313 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240713 |