EP3968050A1 - Verfahren zum erfassen von personen und/oder objekten im innenraum eines kraftfahrzeugs und kraftfahrzeug - Google Patents
Verfahren zum erfassen von personen und/oder objekten im innenraum eines kraftfahrzeugs und kraftfahrzeug Download PDFInfo
- Publication number
- EP3968050A1 EP3968050A1 EP21183971.7A EP21183971A EP3968050A1 EP 3968050 A1 EP3968050 A1 EP 3968050A1 EP 21183971 A EP21183971 A EP 21183971A EP 3968050 A1 EP3968050 A1 EP 3968050A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- motor vehicle
- detected
- uwb antennas
- interior
- uwb
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 25
- 238000011156 evaluation Methods 0.000 claims abstract description 26
- 238000004891 communication Methods 0.000 claims abstract description 11
- 238000001514 detection method Methods 0.000 claims description 12
- 238000010801 machine learning Methods 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 238000005259 measurement Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 230000002596 correlated effect Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000003313 weakening effect Effects 0.000 description 2
- 238000013016 damping Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000036387 respiratory rate Effects 0.000 description 1
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/04—Systems determining presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
- G01S13/56—Discriminating between fixed and moving objects or between objects moving at different speeds for presence detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/886—Radar or analogous systems specially adapted for specific applications for alarm systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
Definitions
- the invention relates to a method for detecting people and/or objects in the interior of a motor vehicle and a motor vehicle.
- the UWB antenna consists of a metal shield, a dielectric substrate and a rectangular printed metal patch.
- the dielectric substrate is placed on the printed metal patch.
- the printed metal patch is arranged on the dielectric substrate and has a horizontal moat gap and two vertical moat gaps.
- the horizontal trench gap runs parallel to the long side of the rectangular printed metal patch, and the vertical trench gaps respectively extend upward from each end of the horizontal trench gap to form two resonant contours, that is, the trench gaps for a U-shaped slot.
- the invention is based on the object of improving a method for detecting people and/or objects in the interior of a motor vehicle and a motor vehicle.
- a method for detecting people and/or objects in the interior of a motor vehicle is provided, with people and/or objects in the interior of the motor vehicle being detected using at least two UWB antennas, which are each arranged in or on different doors of the motor vehicle and a communication with at least one ID transmitter and/or a remote control at least for locking and unlocking serving the doors, and wherein signals detected by means of the at least two UWB antennas are evaluated by means of a control device and an evaluation result is provided.
- a motor vehicle comprising at least two UWB antennas, wherein the at least two UWB antennas are each arranged in or on different doors of the motor vehicle, and wherein the at least two UWB antennas communicate with at least one ID transmitter and/or or a remote control used at least for locking and unlocking the doors, and wherein the at least two UWB antennas are set up to detect people and/or objects in the interior of the motor vehicle; and a control device, wherein the control device is set up to evaluate signals detected by means of the at least two UWB antennas and to provide an evaluation result.
- the method and the motor vehicle make it possible to improve the detection of people and/or objects in the interior of a motor vehicle, in particular with regard to the outlay and manufacturing costs of the motor vehicle.
- UWB antennas used to provide remote-controlled locking and unlocking are also used in or on different doors of the motor vehicle for detecting persons and/or objects in the interior of the motor vehicle.
- a UWB antenna installed in a door of a motor vehicle, which is used for communication with an ID transmitter and/or a remote control has, for example, a transmission and reception angle range, for example of 160°, directed into an external environment of the motor vehicle.
- the UWB antenna has a transmission and reception angle range of, for example, also 160° directed into an interior space.
- the UWB antenna can therefore be used in particular both for an application outside the motor vehicle and additionally for an application in the interior of the motor vehicle. Since the UWB antennas are arranged on or in different doors, signals emitted inwards pass through the interior of the motor vehicle and can also be detected by other of the at least two UWB antennas, eg by a UWB antenna arranged on an opposite door. In particular, the UWB antennas are arranged in such a way that they are not covered by metal on the outside; for example, the UWB antennas may be located in or on an area directly beneath a glass pane of a door of the vehicle, such as where a lock button was located in older vehicles.
- a UWB antenna can be operated in an active mode of operation, in which communication takes place between one UWB antenna and another UWB antenna. Further for example, a UWB antenna can also be operated in a passive mode of operation, in which a pulsed signal is transmitted and radiation reflected by persons or objects is detected by the same UWB antenna. The passive mode of operation can also be referred to as the radar mode of operation. The signals detected by the different UWB antennas are evaluated by the control device and an evaluation result is provided.
- a transit time, a direction-dependent signal attenuation (signal attenuation) and/or the reflections on people and/or objects detected in the passive operating mode can be evaluated, for example by the detected signals of several UWB antennas being merged with one another and/or correlated and/or with reference measurements be compared in order to derive information about people and / or objects in the interior of the motor vehicle in this way.
- the evaluation result includes, for example, information about whether or not a person or an object is in the interior.
- An advantage of the method and of the motor vehicle is that costs for additional sensors in the interior of the motor vehicle can be saved, since UWB antennas are used, which are already used for communication with an ID transmitter and/or a remote control for locking and unlocking the doors of the motor vehicle are used.
- an ultra wide band (UWB) antenna includes an antenna and a transceiver for transmitting and receiving ultra wide band signals.
- the UWB antenna can also include a controller, for example in the form of a microcontroller.
- a UWB antenna is designed in particular to be operated in a frequency range from approximately 3 to approximately 10 GHz.
- the control device can be designed individually or combined as a combination of hardware and software, for example as program code that is executed on a microcontroller or microprocessor. However, it can also be provided that parts are designed individually or combined as an application-specific integrated circuit (ASIC).
- ASIC application-specific integrated circuit
- the evaluation can include the use of machine learning methods.
- a (trained) machine learning method is used to evaluate the signals detected by the UWB antennas, for example in order to estimate seat occupancy and/or other variables or parameters in the interior of the motor vehicle.
- One embodiment provides for the detection to take place both in an active operating mode and in a passive operating mode of the at least two UWB antennas.
- the UWB antennas communicate with each other in pairs. In such a communication, in particular, a reception power can be determined.
- a reference measurement has been carried out for an interior of the motor vehicle without people or objects, reference values for a detected power or signal attenuation are available and can be compared with currently detected or determined values. This makes it possible to determine, for example, whether or not a person or an object is located in a signal path between two UWB antennas.
- a change in the position of a person or an object in the interior of the motor vehicle can also be determined by evaluating a change in the recorded values, such as a received power or a signal weakening.
- signals emitted by a UWB antenna are also detected by other UWB antennas, with the respectively detected signals of the other UWB antennas also being evaluated.
- one of the UWB antennas emits pulses in particular, which (or their reflections) are not only detected by the transmitting UWB antenna, but also by the other UWB antennas.
- An evaluation can include, in particular, a determination of propagation times and/or signal strengths in order to infer the presence and/or state of people and/or objects in the interior. Since the detected signals have each passed through different signal paths through the interior of the motor vehicle, which are influenced by people and/or objects in the interior, a more detailed image of the interior can be determined in this way.
- the evaluation includes determining a position and/or a change in position of a detected person and/or a detected object in the interior of the motor vehicle from the detected signals of the at least two UWB antennas.
- the specific position and/or the specific change in position can be used, for example, to determine the occupancy of individual seats in the motor vehicle.
- a position can be determined in particular from the reflections in the passive operating mode.
- a change in position can be determined from a change in the reflections or the positions.
- the evaluation includes calculating a three-dimensional image of the interior of the motor vehicle from the detected signals includes at least two UWB antennas.
- the calculated three-dimensional image can be supplied, for example, as input data to an assistance or monitoring function of the motor vehicle.
- the method can always be started, in particular, when the doors are closed. As a result, the method can be used more efficiently, in particular in a more targeted and energy-saving manner. Since a distance between the UWB antennas when the doors are closed is known, a closed state of the doors can be inferred from the comparison.
- an identifier of a detected person and/or a detected object is detected or received, the detected or received identifier being linked to a specific position of the person and/or a specific position of the object in the interior of the motor vehicle and to at least one server is transmitted.
- an occupancy status of the seats of a motor vehicle for example a taxi or a minibus, can be detected and clearly assigned to a person. It can therefore be determined when a person (or an object) was transported at what position in the motor vehicle.
- billing can be automated or possible contact routes of people can be recorded and recorded as part of disease protection.
- the identifier can be, for example, a unique identifier of a person (or an object) and can be recorded, for example, via a smartphone of the person or a radio frequency identification (RFID) tag on the smartphone or the person (or on the object) or to the control device be transmitted.
- RFID radio frequency identification
- at least one piece of time information is transmitted to the server, with the time information indicating when and/or how long the person or object is at the specific position in the interior of the motor vehicle stopped.
- the method can also be carried out in other vehicles, for example rail vehicles, ships or aircraft, with appropriately arranged UWB antennas.
- UWB antennas arranged in other different doors of the motor vehicle are used during the detection, with signals detected in an active operating mode and/or in a passive operating mode being evaluated tomographically. Suitable tomographic evaluation methods are known in principle.
- the evaluation includes determining a body posture and/or at least one physiological variable of a detected person and/or determining a size and/or dimensions of a detected object.
- input data for assistance functions of the motor vehicle can be generated and made available.
- at least one vital parameter of a person such as a breathing rate or heart rate
- the determination is made, for example, by evaluating an outer contour of the person or the object, which is derived from the detected signals for a person or an object. Methods of machine learning can also be used in the determination.
- the motor vehicle 50 includes a UWB antenna 1-x on each door 51 . Furthermore, the motor vehicle 50 includes a control device 2, which is connected to the UWB antennas 1-x in terms of signals, for example via a CAN bus of the motor vehicle 50.
- the UWB antennas 1 - x each comprise antennas (not shown) and transceivers (not shown) and are each arranged in or on different doors 51 of the motor vehicle 50 .
- the UWB antennas 1-x are used for communication with at least one ID transmitter 10 and/or a remote control, at least for locking and unlocking the doors 51.
- the UWB antennas 1-x are additionally set up to people 20 and/or Objects in the interior 52 of the motor vehicle 50 to detect.
- the control device 2 is set up to evaluate signals detected by means of the UWB antennas 1 - x and to provide an evaluation result 3 .
- the provision can include, for example, outputting the evaluation result 3, for example in the form of a digital data packet.
- the evaluation result 3 can be transmitted to a vehicle controller 53, for example, and can be used there as input data for an assistance or monitoring function.
- a field strength measurement for the individual UWB antennas 1-x takes place in an active operating mode in which two of the UWB antennas 1-x always communicate with one another in pairs. In this case, in particular, all possible combinations and transmission/reception directions of UWB antennas are permuted 1-x.
- a comparison with reference values that were recorded for an interior 53 of motor vehicle 50 without persons 20 or objects arranged therein can be used to determine whether persons 20 or objects are in the individual signal paths between UWB antennas 1-x or are located in the interior 52 of the motor vehicle 50, since people 20 and objects in the signal path lead to damping and signal weakening.
- methods of machine learning that are known per se are used in order, for example, to also determine positions and/or a type of the objects from a combination of the detected signals.
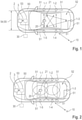
- the UWB antennas 1-x can be operated in a passive operating mode. This mode of operation is shown schematically in 2 shown. In this case, no communication link is formed between the UWB antennas 1-x, but the UWB antennas 1-x are operated in a radar mode in which the transceivers of the individual UWB antennas 1-x emit pulses and reflections of the pulses that are caused by Persons 20 or objects are caused to capture. From the reflections detected by means of the different UWB antennas 1-x at different positions and from different directions, each representing a three-dimensional image of the immediate surroundings of the respective UWB antenna 1-x, the presence of people and/or Objects in the interior 52 of the motor vehicle 50 are closed. The detected signals of the UWB antennas 1-x can be merged with one another.
- the control device 2 evaluates the respectively detected signals and/or the merged signals and uses them to determine, for example by correlating the detected signals or using a machine learning method known per se, information about whether there are people 20 or objects in the interior 52 or not.
- the signals recorded in each case for the two operating modes can likewise be merged with one another and evaluated as merged signals.
- signals emitted by a UWB antenna 1-x in a passive operating mode are also detected by other UWB antennas 1-x, with the respectively detected signals of the other UWB antennas 1-x also being evaluated.
- a database can be enlarged and a more detailed image of the interior 52 can thus be recorded.
- the respective other UWB antennas 1-x do not emit any pulses themselves during the time when the UWB antenna 1-x under consideration is emitting a pulse in the passive operating mode, but rather only those from the transmitting antenna 1-x record the emitted pulse and its reflections.
- the evaluation includes calculating a three-dimensional image of the interior 52 of the motor vehicle 50 from the detected signals of the UWB antennas 1-x.
- the detected signals can be correlated in order to identify and image persons 20 and/or objects in the interior 52 .
- machine learning methods known per se can also be used in order to recognize and map people 20 and/or objects in the interior.
- the method is always started when the doors 51 of the motor vehicle 50 are closed.
- the predetermined at least one distance value 55 corresponds in particular to a distance between the respective UWB antennas 1-x under consideration when the doors 51 are closed.
- a measurement tolerance that occurs is taken into account in the comparison.
- the method can always be started when it is determined that all determined distances 54 correspond to predetermined distance values 55, ie when it is determined that all doors 51 of motor vehicle 50 are closed.
- signals detected in an active operating mode and/or in a passive operating mode are tomographically evaluated by the control device 2 .
- tomographic evaluation methods known per se are used.
- the control device 2 also evaluates, in particular, a change in the detected signals over a number of time steps. In this way, for example, a respiratory rate can be determined via the raising and lowering of a chest of a person 20 who has been detected, etc.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mechanical Engineering (AREA)
- Electromagnetism (AREA)
- Lock And Its Accessories (AREA)
- Radar Systems Or Details Thereof (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
- Die Erfindung betrifft ein Verfahren zum Erfassen von Personen und/oder Objekten im Innenraum eines Kraftfahrzeugs und ein Kraftfahrzeug.
- Es ist bekannt, eine Anwesenheit und einen Zustand von Personen im Innenraum eines Kraftfahrzeugs mittels Sensoren zu erfassen. Bekannt sind Lösungen, die Ultraschall- oder Radarsensoren verwenden. Auch ein Erfassen mittels einer Kamera ist bekannt.
- Aus der
EP 2 157 665 A1 ist eine UWB-Antenne für Transportmittel bekannt. Die UWB-Antenne umfasst einen Metallschirm, ein dielektrisches Substrat und einen rechteckig bedruckten Metallpatch. Das dielektrische Substrat ist auf dem gedruckten Metallpatch angeordnet. Der gedruckte Metallpatch ist auf dem dielektrischen Substrat angeordnet und weist einen horizontalen Grabenspalt und zwei vertikale Grabenspalte auf. Der horizontale Grabenspalt verläuft parallel zur langen Seite des rechteckig bedruckten Metallpatches, und die vertikalen Grabenspalte erstrecken sich jeweils von jedem Ende des horizontalen Grabenspalts nach oben, um zwei Resonanzkonturen zu bilden, das heißt die Grabenspalte für einen U-förmigen Schlitz. - Der Erfindung liegt die Aufgabe zu Grunde, ein Verfahren zum Erfassen von Personen und/oder Objekten im Innenraum eines Kraftfahrzeugs und ein Kraftfahrzeug zu verbessern.
- Die Aufgabe wird erfindungsgemäß durch ein Verfahren mit den Merkmalen des Patentanspruchs 1 und ein Kraftfahrzeug mit den Merkmalen des Patentanspruchs 10 gelöst. Vorteilhafte Ausgestaltungen der Erfindung ergeben sich aus den Unteransprüchen.
- Insbesondere wird ein Verfahren zum Erfassen von Personen und/oder Objekten im Innenraum eines Kraftfahrzeugs zur Verfügung gestellt, wobei Personen und/oder Objekte im Innenraum des Kraftfahrzeugs mittels mindestens zwei UWB-Antennen erfasst werden, die jeweils in oder an unterschiedlichen Türen des Kraftfahrzeugs angeordnet sind und einer Kommunikation mit mindestens einem ID-Geber und/oder einer Fernbedienung zumindest zum Ver- und Entriegeln der Türen dienen, und wobei mittels der mindestens zwei UWB-Antennen erfasste Signale mittels einer Steuereinrichtung ausgewertet werden und ein Auswertungsergebnis bereitgestellt wird.
- Ferner wird insbesondere ein Kraftfahrzeug geschaffen, umfassend mindestens zwei UWB-Antennen, wobei die mindestens zwei UWB-Antennen jeweils in oder an unterschiedlichen Türen des Kraftfahrzeugs angeordnet sind, und wobei die mindestens zwei UWB-Antennen einer Kommunikation mit mindestens einem ID-Geber und/oder einer Fernbedienung zumindest zum Ver- und Entriegeln der Türen dienen, und wobei die mindestens zwei UWB-Antennen dazu eingerichtet sind, Personen und/oder Objekte im Innenraum des Kraftfahrzeugs zu erfassen; und eine Steuereinrichtung, wobei die Steuereinrichtung dazu eingerichtet ist, mittels der mindestens zwei UWB-Antennen erfasste Signale auszuwerten und ein Auswertungsergebnis bereitzustellen.
- Das Verfahren und das Kraftfahrzeug ermöglichen es, das Erfassen von Personen und/oder Objekten im Innenraum eines Kraftfahrzeugs, insbesondere im Hinblick auf einen Aufwand und Herstellungskosten des Kraftfahrzeugs, zu verbessern. Dies erfolgt, indem zum Bereitstellen einer ferngesteuerten Ver- und Entriegelung verwendete in oder an unterschiedlichen Türen des Kraftfahrzeugs angeordnete UWB-Antennen zusätzlich auch zum Erfassen von Personen und/oder Objekten im Innenraum des Kraftfahrzeugs genutzt werden. Eine in einer Tür eines Kraftfahrzeugs verbaute UWB-Antenne, die einer Kommunikation mit einem ID-Geber und/oder einer Fernbedienung dient, weist beispielsweise einen in ein äußeres Umfeld des Kraftfahrzeugs gerichteten Sende- und Empfangswinkelbereich, beispielsweise von 160°, auf. Gleichzeitig weist die UWB-Antenne einen in einen Innenraum hinein gerichteten Sende- und Empfangswinkelbereich, von beispielsweise ebenfalls 160°, auf. Die UWB-Antenne kann daher insbesondere sowohl für eine Anwendung außerhalb des Kraftfahrzeugs als auch zusätzlich für eine Anwendung im Innenraum des Kraftfahrzeugs genutzt werden. Da die UWB-Antennen an oder in unterschiedlichen Türen angeordnet sind, durchlaufen nach Innen ausgesandte Signale den Innenraum des Kraftfahrzeugs und können auch von anderen der mindestens zwei UWB-Antennen, z.B. von einer an einer gegenüberliegenden Tür angeordneten UWB-Antenne, erfasst werden. Die UWB-Antennen sind insbesondere derart angeordnet, dass diese nach außen hin nicht von Metall bedeckt werden; beispielsweise können die UWB-Antennen in oder an einem Bereich direkt unterhalb einer Glasscheibe einer Tür des Fahrzeugs angeordnet sein, beispielsweise dort, wo in älteren Fahrzeugen ein Verriegelungsknopf angeordnet war. Eine UWB-Antenne kann in einem aktiven Betriebsmodus betrieben werden, bei der eine Kommunikation zwischen einer UWB-Antenne und einer anderen UWB-Antenne erfolgt. Ferner kann eine UWB-Antenne auch in einem passiven Betriebsmodus betrieben werden, bei dem ein Impulssignal ausgesandt wird und durch Personen oder Objekte reflektierte Strahlung von der gleichen UWB-Antenne erfasst wird. Der passive Betriebsmodus kann auch als Radar-Betriebsmodus bezeichnet werden. Die von den unterschiedlichen UWB-Antennen erfassten Signale werden von der Steuereinrichtung ausgewertet und ein Auswertungsergebnis wird bereitgestellt. Hierbei können insbesondere eine Laufzeit, eine richtungsabhängige Signalabschwächung (Signaldämpfung) und/oder die im passiven Betriebsmodus erfassten Reflexionen an Personen und/oder Objekten ausgewertet werden, beispielsweise indem erfasste Signale mehrerer UWB-Antennen miteinander fusioniert und/oder korreliert werden und/oder mit Referenzmessungen verglichen werden, um auf diese Weise eine Information über Personen und/oder Objekte im Innenraum des Kraftfahrzeugs abzuleiten. Im einfachsten Fall umfasst das Auswertungsergebnis beispielsweise eine Information darüber, ob sich eine Person oder ein Objekt im Innenraum befinden oder nicht.
- Ein Vorteil des Verfahrens und des Kraftfahrzeugs ist, dass Kosten für eine zusätzliche Sensorik im Innenraum des Kraftfahrzeugs eingespart werden können, da UWB-Antennen verwendet werden, die ohnehin für eine Kommunikation mit einem ID-Geber und/oder einer Fernbedienung zum Ver- und Entriegeln der Türen des Kraftfahrzeugs eingesetzt werden.
- Eine Ultra Wide Band (UWB)-Antenne umfasst insbesondere eine Antenne und einen Transceiver zum Senden und Empfangen von Ultrabreitband-Signalen. Ferner kann die UWB-Antenne auch eine Steuerung, beispielsweise in Form eines Mikrocontrollers, umfassen. Eine UWB-Antenne ist insbesondere dazu ausgebildet, um in einem Frequenzbereich von ca. 3 bis ca. 10 GHz betrieben zu werden.
- Die Steuereinrichtung kann einzeln oder zusammengefasst als eine Kombination von Hardware und Software ausgebildet sein, beispielsweise als Programmcode, der auf einem Mikrocontroller oder Mikroprozessor ausgeführt wird. Es kann jedoch auch vorgesehen sein, dass Teile einzeln oder zusammengefasst als anwendungsspezifische integrierte Schaltung (ASIC) ausgebildet sind.
- Das Auswerten kann grundsätzlich den Einsatz von Verfahren des Maschinenlernens umfassen. Beispielsweise kann vorgesehen sein, ein (trainiertes) Maschinenlernverfahren zum Auswerten der von den UWB-Antennen erfassten Signale zu verwenden, um beispielsweise eine Sitzbelegung und/oder sonstige Größen oder Parameter im Innenraum des Kraftfahrzeugs zu schätzen.
- In einer Ausführungsform ist vorgesehen, dass das Erfassen sowohl in einem aktiven Betriebsmodus als auch in einem passiven Betriebsmodus der mindestens zwei UWB-Antennen erfolgt. Im aktiven Betriebsmodus kommunizieren die UWB-Antennen jeweils paarweise miteinander. Bei einer solchen Kommunikation kann insbesondere eine Empfangsleistung bestimmt werden. Wurde eine Referenzmessung für einen Innenraum des Kraftfahrzeugs ohne Personen oder Objekte durchgeführt, stehen Referenzwerte für eine erfasste Leistung bzw. eine Signalabschwächung zur Verfügung und können mit aktuell erfassten bzw. bestimmten Werten verglichen werden. Hierdurch lässt sich beispielsweise feststellen, ob in einem Signalweg zwischen zwei UWB-Antennen eine Person oder ein Objekt angeordnet ist oder nicht. Auch eine Änderung einer Position einer Person oder eines Objektes im Innenraum des Kraftfahrzeugs kann über eine Auswertung einer Änderung von den erfassten Werten, wie z.B. von einer Empfangsleistung oder von einer Signalabschwächung, bestimmt werden.
- In einer Ausführungsform ist vorgesehen, dass in einem passiven Betriebsmodus von einer UWB-Antenne ausgesandte Signale auch von anderen UWB-Antennen erfasst werden, wobei die jeweils erfassten Signale der anderen UWB-Antennen ebenfalls ausgewertet werden. Anders ausgedrückt sendet eine der UWB-Antennen im passiven Betriebsmodus insbesondere Impulse aus, die (bzw. deren Reflexionen) nicht nur von der sendenden UWB-Antenne erfasst werden, sondern auch von den anderen UWB-Antennen. Eine Auswertung kann insbesondere ein Bestimmen von Laufzeiten und/oder von Signalstärken umfassen, um auf eine Anwesenheit und/oder einen Zustand von Personen und/oder Objekten im Innenraum zu schließen. Da die erfassten Signale jeweils unterschiedliche Signalwege durch den Innenraum des Kraftfahrzeugs durchlaufen haben, die von Personen und/oder Objekten im Innenraum beeinflusst werden, lässt sich hierdurch ein detaillierteres Abbild des Innenraums bestimmen.
- In einer Ausführungsform ist vorgesehen, dass das Auswerten ein Bestimmen einer Position und/oder einer Positionsänderung einer erfassten Person und/oder eines erfassten Objektes im Innenraum des Kraftfahrzeugs aus den erfassten Signalen der mindestens zwei UWB-Antennen umfasst. Über die bestimmte Position und/oder die bestimmte Positionsänderung kann beispielsweise eine Sitzplatzbelegung einzelner Sitze des Kraftfahrzeugs bestimmt werden. Eine Position lässt sich insbesondere aus den Reflexionen im passiven Betriebsmodus bestimmen. Eine Positionsänderung lässt sich aus einer Änderung der Reflexionen bzw. der Positionen bestimmen.
- In einer Ausführungsform ist vorgesehen, dass das Auswerten ein Berechnen eines dreidimensionalen Abbildes des Innenraums des Kraftfahrzeugs aus den erfassten Signalen der mindestens zwei UWB-Antennen umfasst. Das berechnete dreidimensionalen Abbild kann beispielsweise als Eingangsdatum einer Assistenz- oder Überwachungsfunktion des Kraftfahrzeugs zugeführt werden.
- In einer Ausführungsform ist vorgesehen, dass in einem aktiven Betriebsmodus der mindestens zwei UWB-Antennen mindestens ein Abstand zwischen den mindestens zwei UWB-Antennen bestimmt wird, wobei der bestimmte mindestens eine Abstand mit mindestens einem vorgegebenen Abstandswert verglichen wird, und wobei das Erfassen von Personen und/oder Objekten im Innenraum des Kraftfahrzeugs gestartet wird, wenn das Vergleichsergebnis ergibt, dass der bestimmte Abstand dem mindestens einen vorgegebenen Abstandswert entspricht. Hierdurch kann das Verfahren insbesondere immer dann gestartet werden, wenn die Türen geschlossen sind. Das Verfahren kann hierdurch effizienter, insbesondere zielgerichteter und energiesparender eingesetzt werden. Da ein Abstand zwischen den UWB-Antennen bei geschlossenen Türen bekannt ist, kann durch den Vergleich auf einen Schließzustand der Türen geschlossen werden.
- In einer Ausführungsform ist vorgesehen, dass eine Identifikationskennung einer erfassten Person und/oder eines erfassten Objektes erfasst oder empfangen wird, wobei die erfasste oder empfangene Identifikationskennung mit einer bestimmten Position der Person und/oder einer bestimmten Position des Objektes im Innenraum des Kraftfahrzeugs verknüpft und an mindestens einen Server übermittelt wird. Hierdurch kann ein Belegungszustand der Sitze eines Kraftfahrzeuges, beispielsweise eines Taxis oder eines Minibusses, erfasst und eindeutig einer Person zugeordnet werden. Es lässt sich daher feststellen, wann eine Person (oder ein Objekt) an welcher Position im Kraftfahrzeug transportiert wurde. Hierdurch können beispielsweise eine Abrechnung automatisiert werden oder mögliche Kontaktwege von Personen im Rahmen des Seuchenschutzes erfasst und aufgezeichnet werden. Die Identifikationskennung kann beispielsweise eine eindeutige Identifikationskennung einer Person (oder eines Objektes) sein und kann beispielsweise über ein Smartphone der Person oder einen Radio Frequency Identification (RFID)-Tag am Smartphone oder der Person (oder an dem Objekt) erfasst bzw. an die Steuereinrichtung übermittelt werden. Insbesondere wird neben der Identifikationskennung und der Position auch mindestens eine Zeitangabe, beispielsweise ein Zeitstempel oder ein Zeitintervall, an den Server übermittelt, wobei die Zeitangabe angibt, wann und/oder wie lange sich die Person oder das Objekt an der bestimmten Position im Innenraum im Kraftfahrzeug aufgehalten hat.
- Grundsätzlich kann vorgesehen sein, das Verfahren mit entsprechend angeordneten UWB-Antennen auch in anderen Fahrzeugen, beispielsweise Schienenfahrzeugen, Schiffen oder Luftfahrzeugen durchzuführen.
- In einer Ausführungsform ist vorgesehen, dass beim Erfassen weitere in weiteren unterschiedlichen Türen des Kraftfahrzeugs angeordnete UWB-Antennen verwendet werden, wobei in einem aktiven Betriebsmodus und/oder in einem passiven Betriebsmodus erfasste Signale tomographisch ausgewertet werden. Geeignete tomographische Auswertungsverfahren sind grundsätzlich bekannt.
- In einer Ausführungsform ist vorgesehen, dass das Auswerten das Bestimmen von einer Körperhaltung und/oder von mindestens einer physiologischen Größe einer erfassten Person und/oder das Bestimmen von einer Größe und/oder von Abmessungen eines erfassten Objektes umfasst. Hierdurch können Eingangsdaten für Assistenzfunktionen des Kraftfahrzeugs erzeugt und bereitgestellt werden. Beispielsweise kann als physiologische Größe mindestens ein Vitalparameter einer Person, wie beispielsweise eine Atem- oder Herzfrequenz bestimmt werden. Das Bestimmen erfolgt beispielsweise durch Auswerten einer aus den erfassten Signalen für eine Person oder ein Objekt abgeleiteten äußeren Kontur der Person oder des Objektes. Beim Bestimmen können auch Verfahren des Maschinenlernens zum Einsatz kommen.
- Nachfolgend wird die Erfindung anhand bevorzugter Ausführungsbeispiele unter Bezugnahme auf die Figuren näher erläutert. Hierbei zeigen:
- Fig. 1
- eine schematische Darstellung einer Ausführungsform des Kraftfahrzeugs (aktiver Betriebsmodus der UWB-Antennen schematisch dargestellt);
- Fig. 2
- eine schematische Darstellung einer Ausführungsform des Kraftfahrzeugs (passiver Betriebsmodus der UWB-Antennen schematisch dargestellt).
- In
Fig. 1 ist eine schematische Darstellung einer Ausführungsform des Kraftfahrzeugs 50 gezeigt. Das Kraftfahrzeug 50 umfasst an jeder Tür 51 eine UWB-Antenne 1-x. Ferner umfasst das Kraftfahrzeug 50 eine Steuereinrichtung 2, die mit den UWB-Antennen 1-x signaltechnisch verbunden ist, beispielsweise über einen CAN-Bus des Kraftfahrzeugs 50. - Die UWB-Antennen 1-x umfassen jeweils Antennen (nicht gezeigt) und Transceiver (nicht gezeigt) und sind jeweils in oder an unterschiedlichen Türen 51 des Kraftfahrzeugs 50 angeordnet. Die UWB-Antennen 1-x dienen einer Kommunikation mit mindestens einem ID-Geber 10 und/oder einer Fernbedienung zumindest zum Ver- und Entriegeln der Türen 51. Die UWB-Antennen 1-x sind jedoch zusätzlich dazu eingerichtet, Personen 20 und/oder Objekte im Innenraum 52 des Kraftfahrzeugs 50 zu erfassen.
- Die Steuereinrichtung 2 ist dazu eingerichtet, mittels der UWB-Antennen 1-x erfasste Signale auszuwerten und ein Auswertungsergebnis 3 bereitzustellen. Das Bereitstellen kann beispielsweise das Ausgeben des Auswertungsergebnisses 3 umfassen, beispielsweise in Form eines digitalen Datenpakets. Das Auswertungsergebnis 3 kann beispielsweise an eine Fahrzeugsteuerung 53 übermittelt werden und dort als Eingangsdaten für eine Assistenz- oder Überwachungsfunktion dienen.
- Nachfolgend ist eine Ausführungsform des Verfahrens zum Erfassen von Personen und/oder Objekten im Innenraum 52 des Kraftfahrzeugs 50 beschrieben, das mittels des Kraftfahrzeugs 50 ausgeführt wird.
- In einer Maßnahme erfolgt in einem aktiven Betriebsmodus, bei dem immer zwei der UWB-Antennen 1-x paarweise miteinander kommunizieren eine Feldstärkemessung für die einzelnen UWB-Antennen 1-x. Hierbei werden insbesondere sämtliche möglichen Kombinationen und Sende-/Empfangsrichtungen von UWB-Antennen 1-x durchpermutiert. Beim Auswerten kann über einen Vergleich mit Referenzwerten, die für einen Innenraum 53 des Kraftfahrzeugs 50 ohne darin angeordnete Personen 20 oder Objekte erfasst wurden, festgestellt werden, ob sich Personen 20 oder Objekte in den einzelnen Signalwegen zwischen den UWB-Antennen 1-x bzw. im Innenraum 52 des Kraftfahrzeugs 50 befinden, da Personen 20 und Objekte im Signalweg zu einer Dämpfung und Signalabschwächung führen. Beim Auswerten kann vorgesehen sein, an sich bekannte Verfahren des Maschinenlernens zu verwenden, um beispielsweise aus einer Kombination der erfassten Signale auch Positionen und/oder eine Art der Objekte zu ermitteln.
- Zusätzlich oder alternativ können die UWB-Antennen 1-x in einem passiven Betriebsmodus betrieben werden. Dieser Betriebsmodus ist schematisch in der
Fig. 2 dargestellt. Hierbei wird zwischen den UWB-Antennen 1-x keine Kommunikationsverbindung ausgebildet, sondern die UWB-Antennen 1-x werden in einem Radarmodus betrieben, bei dem die Transceiver der einzelnen UWB-Antennen 1-x Impulse aussenden und Reflexionen der Impulse, die durch Personen 20 oder Objekte hervorgerufen werden, erfassen. Aus den jeweils mittels der unterschiedlichen UWB-Antennen 1-x an unterschiedlichen Positionen und aus unterschiedlichen Richtungen erfassten Reflexionen, die jeweils ein dreidimensionales Abbild der unmittelbaren Umgebung der jeweiligen UWB-Antenne 1-x repräsentieren, kann auf das Vorhandensein von Personen und/oder von Objekten im Innenraum 52 des Kraftfahrzeugs 50 geschlossen werden. Die erfassten Signale der UWB-Antennen 1-x können hierbei miteinander fusioniert werden. - Um das Erfassen gegenseitig nicht zu beeinflussen, ist insbesondere vorgesehen, dass das Erfassen reihum erfolgt, wobei immer nur eine der UWB-Antennen 1-x zum gleichen Zeitpunkt sendet.
- Die Steuereinrichtung 2 wertet die jeweils erfassten Signale und/oder die fusionierten Signale aus und bestimmt hieraus, beispielsweise über eine Korrelation der erfassten Signale oder mittels eines an sich bekannten Verfahrens des Maschinenlernens, eine Information darüber, ob sich Personen 20 oder Objekte im Innenraum 52 befinden oder nicht.
- Es kann vorgesehen sein, dass das Erfassen sowohl in einem aktiven Betriebsmodus (
Fig. 1 ) als auch in einem passiven Betriebsmodus (Fig. 2 ) der UWB-Antennen 1-x erfolgt. Die jeweils für die beiden Betriebsmodi erfassten Signale können ebenfalls miteinander fusioniert werden und als fusionierte Signale ausgewertet werden. - Grundsätzlich ist auch eine Fusion der erfassten Signale mit Sensordaten anderer im Innenraum 52 des Kraftfahrzeugs 50 verbauter Sensoren möglich.
- Es kann vorgesehen sein, dass in einem passiven Betriebsmodus von einer UWB-Antenne 1-x ausgesandte Signale auch von anderen UWB-Antennen 1-x erfasst werden, wobei die jeweils erfassten Signale der anderen UWB-Antennen 1-x ebenfalls ausgewertet werden. Hierdurch lässt sich eine Datenbasis vergrößern und somit ein detaillierteres Abbild des Innenraums 52 erfassen. Hierbei ist insbesondere vorgesehen, dass die jeweils anderen UWB-Antennen 1-x in der Zeit, wo die betrachtete UWB-Antenne 1-x im passiven Betriebsmodus einen Impuls aussendet, selbst keine Impulse aussenden, sondern lediglich den von der sendenden Antenne 1-x ausgesandten Impuls und dessen Reflexionen erfassen.
- Es kann vorgesehen sein, dass das Auswerten ein Bestimmen einer Position und/oder einer Positionsänderung einer erfassten Person 20 und/oder eines erfassten Objektes im Innenraum 52 des Kraftfahrzeugs 50 aus den erfassten Signalen der UWB-Antennen 1-x umfasst.
- Es kann vorgesehen sein, dass das Auswerten ein Berechnen eines dreidimensionalen Abbildes des Innenraums 52 des Kraftfahrzeugs 50 aus den erfassten Signalen der UWB-Antennen 1-x umfasst. Hierbei kann beispielsweise eine Korrelation der erfassten Signale durchgeführt werden, um Personen 20 und/oder Objekte im Innenraum 52 zu erkennen und abzubilden. Alternativ oder zusätzlich können auch an sich bekannte Maschinenlernverfahren verwendet werden, um Personen 20 und/oder Objekte im Innenraum zu erkennen und abzubilden.
- Es kann vorgesehen sein, dass in einem aktiven Betriebsmodus der UWB-Antennen 1-x mindestens ein Abstand 54 zwischen den mindestens zwei UWB-Antennen 1-x bestimmt wird, wobei der bestimmte mindestens eine Abstand 54 mit mindestens einem vorgegebenen Abstandswert 55 verglichen wird, und wobei das Erfassen von Personen 20 und/oder Objekten im Innenraum 52 des Kraftfahrzeugs 50 gestartet wird, wenn das Vergleichsergebnis ergibt, dass der bestimmte Abstand 54 dem mindestens einen vorgegebenen Abstandswert 55 entspricht. Hierdurch wird das Verfahren immer dann gestartet, wenn die Türen 51 des Kraftfahrzeugs 50 geschlossen sind. Der vorgegebene mindestens eine Abstandswert 55 entspricht insbesondere einem Abstand zwischen den jeweils betrachteten UWB-Antennen 1-x bei geschlossenen Türen 51. Beim Vergleichen wird eine auftretende Messtoleranz berücksichtigt. Insbesondere kann das Verfahren immer dann gestartet werden, wenn festgestellt wird, dass alle bestimmten Abstände 54 jeweils vorgegebenen Abstandswerten 55 entsprechen, das heißt wenn festgestellt wird, dass alle Türen 51 des Kraftfahrzeugs 50 geschlossen sind.
- Es kann vorgesehen sein, dass eine Identifikationskennung 21 einer erfassten Person 20 und/oder eines erfassten Objektes erfasst oder empfangen wird, wobei die erfasste oder empfangene Identifikationskennung 21 mit einer bestimmten Position der Person 20 und/oder einer bestmimten Position des Objektes im Innenraum 52 des Kraftfahrzeugs 50 verknüpft und mittels der Steuereinrichtung 2, beispielsweise über eine Kommunikationsschnittstelle (nicht gezeigt) des Kraftfahrzeugs, an mindestens einen Server 30 übermittelt wird.
- Es kann vorgesehen sein, dass in einem aktiven Betriebsmodus und/oder in einem passiven Betriebsmodus erfasste Signale mittels der Steuereinrichtung 2 tomographisch ausgewertet werden. Hierbei werden an sich bekannte tomographische Auswertungsverfahren verwendet.
- Es kann vorgesehen sein, dass das Auswerten das Bestimmen von einer Körperhaltung und/oder von mindestens einer physiologischen Größe einer erfassten Person 20 und/oder das Bestimmen von einer Größe und/oder von Abmessungen eines erfassten Objektes umfasst. Hierbei wertet die Steuereinrichtung 2 insbesondere auch eine Änderung in den erfassten Signalen über mehrere Zeitschritte aus. Auf diese Weise lässt sich beispielsweise eine Atemfrequenz über das Heben und Senken eines Brustkorbs einer erfassten Person 20 bestimmen etc.
-
- 1-x
- UWB-Antenne
- 2
- Steuereinrichtung
- 3
- Auswertungsergebnis
- 10
- ID-Geber
- 20
- Person
- 21
- Identifikationskennung
- 30
- Server
- 50
- Kraftfahrzeug
- 51
- Tür
- 52
- Innenraum
- 53
- Fahrzeugsteuerung
- 54
- Abstand
- 55
- vorgegebener Abstandswert
Claims (10)
- Verfahren zum Erfassen von Personen (20) und/oder Objekten im Innenraum (52) eines Kraftfahrzeugs (50),
wobei Personen (20) und/oder Objekte im Innenraum des Kraftfahrzeugs (50) mittels mindestens zwei UWB-Antennen (1-x) erfasst werden, die jeweils in oder an unterschiedlichen Türen (51) des Kraftfahrzeugs (50) angeordnet sind und einer Kommunikation mit mindestens einem ID-Geber (10) und/oder einer Fernbedienung zumindest zum Ver- und Entriegeln der Türen (51) dienen, und wobei mittels der mindestens zwei UWB-Antennen (1-x) erfasste Signale mittels einer Steuereinrichtung (2) ausgewertet werden und ein Auswertungsergebnis (3) bereitgestellt wird. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass das Erfassen sowohl in einem aktiven Betriebsmodus als auch in einem passiven Betriebsmodus der mindestens zwei UWB-Antennen (1-x) erfolgt.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass in einem passiven Betriebsmodus von einer UWB-Antenne (1-x) ausgesandte Signale auch von anderen UWB-Antennen (1-x) erfasst werden, wobei die jeweils erfassten Signale der anderen UWB-Antennen (1-x) ebenfalls ausgewertet werden.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass das Auswerten ein Bestimmen einer Position und/oder einer Positionsänderung einer erfassten Person (20) und/oder eines erfassten Objektes im Innenraum (52) des Kraftfahrzeugs (50) aus den erfassten Signalen der mindestens zwei UWB-Antennen (1-x) umfasst.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass das Auswerten ein Berechnen eines dreidimensionalen Abbildes des Innenraums (52) des Kraftfahrzeugs (50) aus den erfassten Signalen der mindestens zwei UWB-Antennen (1-x) umfasst.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass in einem aktiven Betriebsmodus der mindestens zwei UWB-Antennen (1-x) mindestens ein Abstand (54) zwischen den mindestens zwei UWB-Antennen (1-x) bestimmt wird, wobei der bestimmte mindestens eine Abstand (54) mit mindestens einem vorgegebenen Abstandswert verglichen wird, und wobei das Erfassen von Personen (20) und/oder Objekten im Innenraum (52) des Kraftfahrzeugs (50) gestartet wird, wenn das Vergleichsergebnis ergibt, dass der bestimmte Abstand (54) dem mindestens einen vorgegebenen Abstandswert (55) entspricht.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass eine Identifikationskennung (21) einer erfassten Person (20) und/oder eines erfassten Objektes erfasst oder empfangen wird, wobei die erfasste oder empfangene Identifikationskennung (21) mit einer bestimmten Position der Person (20) und/oder einer bestmimten Position des Objektes im Innenraum (52) des Kraftfahrzeugs (50) verknüpft und an mindestens einen Server (30) übermittelt wird.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass beim Erfassen weitere in weiteren unterschiedlichen Türen (51) des Kraftfahrzeugs (50) angeordnete UWB-Antennen (1-x) verwendet werden, wobei in einem aktiven Betriebsmodus und/oder in einem passiven Betriebsmodus erfasste Signale tomographisch ausgewertet werden.
- Verfahren nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass das Auswerten das Bestimmen von einer Körperhaltung und/oder von mindestens einer physiologischen Größe einer erfassten Person (20) und/oder das Bestimmen von einer Größe und/oder von Abmessungen eines erfassten Objektes umfasst.
- Kraftfahrzeug (50), umfassend:mindestens zwei UWB-Antennen (1-x), wobei die mindestens zwei UWB-Antennen (1-x) jeweils in oder an unterschiedlichen Türen (51) des Kraftfahrzeugs (50) angeordnet sind, und wobei die mindestens zwei UWB-Antennen (1-x) einer Kommunikation mit mindestens einem ID-Geber (10) und/oder einer Fernbedienung zumindest zum Ver- und Entriegeln der Türen dienen, und wobei die mindestens zwei UWB-Antennen (1-x) dazu eingerichtet sind, Personen (20) und/oder Objekte im Innenraum (52) des Kraftfahrzeugs (50) zu erfassen; undeine Steuereinrichtung (2),wobei die Steuereinrichtung (2) dazu eingerichtet ist, mittels der mindestens zwei UWB-Antennen (1-x) erfasste Signale auszuwerten und ein Auswertungsergebnis (3) bereitzustellen.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020209650.3A DE102020209650A1 (de) | 2020-07-30 | 2020-07-30 | Verfahren zum Erfassen von Personen und/oder Objekten im Innenraum eines Kraftfahrzeugs und Kraftfahrzeug |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3968050A1 true EP3968050A1 (de) | 2022-03-16 |
Family
ID=77206919
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21183971.7A Pending EP3968050A1 (de) | 2020-07-30 | 2021-07-06 | Verfahren zum erfassen von personen und/oder objekten im innenraum eines kraftfahrzeugs und kraftfahrzeug |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220035017A1 (de) |
| EP (1) | EP3968050A1 (de) |
| JP (1) | JP7295174B2 (de) |
| CN (1) | CN114089269A (de) |
| DE (1) | DE102020209650A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022122348A1 (de) | 2022-09-05 | 2024-03-07 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung und Verfahren zur exakten Sitzbelegungserkennung |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230153417A (ko) | 2021-03-03 | 2023-11-06 | 가디언 글라스, 엘엘씨 | 전기장들의 변화들을 생성 및 검출하기 위한 시스템들 및/또는 방법들 |
| US11987208B2 (en) * | 2021-03-15 | 2024-05-21 | Denso International America, Inc. | UWB module auto location in vehicle |
| JP2023042216A (ja) * | 2021-09-14 | 2023-03-27 | 株式会社東海理化電機製作所 | 通信装置 |
| JP2024035597A (ja) * | 2022-09-02 | 2024-03-14 | 株式会社Soken | 乗員位置推定装置及び乗員位置推定方法 |
| DE102022124924A1 (de) | 2022-09-28 | 2024-03-28 | Cariad Se | Verfahren zum Betreiben einer Verriegelungsfunktion für eine Tür und/oder ein Fenster eines Kraftfahrzeugs |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002042124A2 (en) * | 2000-11-21 | 2002-05-30 | Time Domain Corporation | System and method for controlling air bag deployment systems |
| DE10237331A1 (de) * | 2002-08-14 | 2004-03-04 | Siemens Ag | Verfahren zur Abstandsmessung für ein Kraftfahrzeug zur Be-stimmung des Abstandes zwischen dem Fahrzeug und wenigstens einem weiteren Objekt |
| EP2157665A1 (de) | 2008-08-22 | 2010-02-24 | Industrial Technology Research Institute | UWB-Antenne und Detektionsvorrichtung für Transportmittel |
| DE102013201836A1 (de) * | 2013-02-05 | 2014-08-07 | Continental Teves Ag & Co. Ohg | Verfahren und Vorrichtung zur Anwesenheitserkennung von Objekten in einer Fahrgastzelle eines Fahrzeugs |
| DE102017216239A1 (de) * | 2017-09-14 | 2019-03-14 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Erfassen eines Zustands und/oder Verhaltens eines Insassen eines Fahrzeugs |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007249722A (ja) | 2006-03-17 | 2007-09-27 | Hitachi Ltd | 物体検知装置 |
| FR2953313B1 (fr) | 2009-11-27 | 2012-09-21 | Thales Sa | Systeme optronique et procede d'elaboration d'images en trois dimensions dedies a l'identification |
| JP5718139B2 (ja) | 2011-04-21 | 2015-05-13 | 日野自動車株式会社 | レーダ装置、バス、および乗客移動検出方法、並びにプログラム |
| JP6510378B2 (ja) * | 2015-10-02 | 2019-05-08 | 株式会社Soken | 検出装置 |
| DE102016213689B4 (de) | 2016-07-26 | 2024-02-29 | Volkswagen Aktiengesellschaft | Vorrichtung, Verfahren und Computerprogramm zum Charakterisieren von Antenneneinheiten in einem vordefinierten Raum |
| DE102017215864B3 (de) | 2017-09-08 | 2019-03-07 | Audi Ag | Verfahren zum Regeln einer Sendeleistung für eine von einem Kraftfahrzeug ausgehende Funkverbindung, Regelvorrichtung für ein Kraftfahrzeug und Kraftfahrzeug mit Regelvorrichtung |
| EP3501916B1 (de) * | 2017-12-21 | 2021-05-05 | Volkswagen Aktiengesellschaft | Verfahren zum betreiben eines funkbasierten überwachungssystems eines kraftfahrzeugs sowie überwachungssystem und tageinheit für das überwachungssystem |
| US11925446B2 (en) * | 2018-02-22 | 2024-03-12 | Vayyar Imaging Ltd. | Radar-based classification of vehicle occupants |
| KR20200118844A (ko) | 2018-03-09 | 2020-10-16 | 가부시키가이샤 시스템 투원 | 정보 처리 장치, 및 정보 처리 시스템 |
| JP7009328B2 (ja) | 2018-03-22 | 2022-01-25 | 株式会社東海理化電機製作所 | 距離測定システム |
| JP7003820B2 (ja) | 2018-04-09 | 2022-01-21 | 株式会社Soken | 車両用電子キーシステム |
| JP7099161B2 (ja) | 2018-08-10 | 2022-07-12 | 株式会社Soken | 携帯機位置推定システム |
| CN109581361A (zh) | 2018-11-22 | 2019-04-05 | 九牧厨卫股份有限公司 | 一种检测方法、检测装置、终端以及检测系统 |
| JP7206926B2 (ja) | 2019-01-10 | 2023-01-18 | 株式会社デンソー | 乗員位置推定システム |
| JP2022541190A (ja) * | 2019-07-16 | 2022-09-22 | メタウェーブ コーポレーション | ミリメートル波用途において使用されるフェーズドアレイアンテナ較正システム及び方法 |
| DE102019214163A1 (de) * | 2019-09-17 | 2021-03-18 | Robert Bosch Gmbh | Verfahren zur Signalauswertung in einem Ortungssystem mit mehreren Radarsensoren |
-
2020
- 2020-07-30 DE DE102020209650.3A patent/DE102020209650A1/de active Pending
-
2021
- 2021-07-06 EP EP21183971.7A patent/EP3968050A1/de active Pending
- 2021-07-28 US US17/386,771 patent/US20220035017A1/en active Pending
- 2021-07-29 JP JP2021124412A patent/JP7295174B2/ja active Active
- 2021-07-30 CN CN202110870627.2A patent/CN114089269A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002042124A2 (en) * | 2000-11-21 | 2002-05-30 | Time Domain Corporation | System and method for controlling air bag deployment systems |
| DE10237331A1 (de) * | 2002-08-14 | 2004-03-04 | Siemens Ag | Verfahren zur Abstandsmessung für ein Kraftfahrzeug zur Be-stimmung des Abstandes zwischen dem Fahrzeug und wenigstens einem weiteren Objekt |
| EP2157665A1 (de) | 2008-08-22 | 2010-02-24 | Industrial Technology Research Institute | UWB-Antenne und Detektionsvorrichtung für Transportmittel |
| DE102013201836A1 (de) * | 2013-02-05 | 2014-08-07 | Continental Teves Ag & Co. Ohg | Verfahren und Vorrichtung zur Anwesenheitserkennung von Objekten in einer Fahrgastzelle eines Fahrzeugs |
| DE102017216239A1 (de) * | 2017-09-14 | 2019-03-14 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Erfassen eines Zustands und/oder Verhaltens eines Insassen eines Fahrzeugs |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022122348A1 (de) | 2022-09-05 | 2024-03-07 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung und Verfahren zur exakten Sitzbelegungserkennung |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7295174B2 (ja) | 2023-06-20 |
| JP2022027637A (ja) | 2022-02-10 |
| US20220035017A1 (en) | 2022-02-03 |
| CN114089269A (zh) | 2022-02-25 |
| DE102020209650A1 (de) | 2022-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3968050A1 (de) | Verfahren zum erfassen von personen und/oder objekten im innenraum eines kraftfahrzeugs und kraftfahrzeug | |
| EP1900579B1 (de) | Zugangsanordnung für ein Fahrzeug | |
| DE19900415B4 (de) | Verfahren zum Durchführen einer schlüssellosen Zugangsberechtigungskontrolle für Kraftfahrzeuge | |
| DE102017113452B4 (de) | Radargestützte Umfeldsicherung und Steuerung für ein Fahrzeug | |
| DE102019212231B4 (de) | Verfahren zur Tür- oder Klappenbedienung bei einem Fahrzeug sowie Authentifizierungselement | |
| DE10353589B4 (de) | Verfahren zur automatischen Fernverriegelung eines Fahrzeugs | |
| EP3472809B1 (de) | Verfahren zur kontrolle des zugriffs auf ein kraftfahrzeug | |
| DE102012204673A1 (de) | Vorrichtung und Verfahren zum Erkennen eines Drahtlosgeräts | |
| EP3580731A1 (de) | Verfahren zum betreiben eines authentifizierungssystems und authentifizierungssystem | |
| DE102018101959A1 (de) | Telefon-als-schlüssel-lokalisierung auf grundlage von objekterfassung | |
| DE102014101086A1 (de) | Mobilgerät für ein schlüsselloses Zugangs- oder Betätigungssystem für Kraftfahrzeuge | |
| EP2125449B1 (de) | Verfahren zur abstandscharakterisierung bei induktiv gekoppelten zugangssystemen für fahrzeuge | |
| DE102019216947B4 (de) | Verfahren zum Aktivieren einer fernsteuerbaren Funktion eines Kraftfahrzeugs mittels eines mobilen Steuergeräts sowie System zum Durchführen eines derartigen Verfahrens | |
| EP3695389A1 (de) | Kommunikationssystem eines fahrzeugs | |
| WO2004057542A1 (de) | Fahrzeugsicherungssystem | |
| DE202013103554U1 (de) | Vorrichtung zur Dualbereichsdetektion in einem Fahrzeug | |
| DE102016220126A1 (de) | Verfahren zum Betreiben einer Sicherheitseinrichtung eines Fahrzeugs und Sicherheitsanordnung für ein Fahrzeug | |
| DE102016215901A1 (de) | Funkschlüssel-Schließvorrichtung für ein Kraftfahrzeug, Kraftfahrzeug und Verfahren zum Betreiben der Schließvorrichtung | |
| DE112018005902T5 (de) | Verfahren und system zur verhinderung von relais-angriffen mit vektorprüfung | |
| EP3210838B1 (de) | Verfahren zur erkennung einer manipulation einer kommunikation zwischen einer fernbedienbaren verriegelungseinheit und einer dazu korrespondierenden fernbedienung | |
| DE102014119401A1 (de) | Verfahren zur Nutzung der relativen Position eines Nutzers zu einem Fahrzeug und Nutzungssystem | |
| DE102008023847B4 (de) | Anordnung und Verfahren zur Feststellung der Anwesenheit einer mobilen Sende- und Empfangseinheit | |
| DE102018130876A1 (de) | Verfahren und System zum Lokalisieren eines mobilen Identifikationsgebers eines Fahrzeuges | |
| EP4327578A1 (de) | Verfahren und kraftfahrzeug | |
| DE102014220399B4 (de) | Verfahren und Vorrichtung zur Zugangs- und Startverifizierung in einem Fahrzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20220916 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |