EP3880147B1 - Rehabilitationsvorrichtung - Google Patents
Rehabilitationsvorrichtung Download PDFInfo
- Publication number
- EP3880147B1 EP3880147B1 EP19794455.6A EP19794455A EP3880147B1 EP 3880147 B1 EP3880147 B1 EP 3880147B1 EP 19794455 A EP19794455 A EP 19794455A EP 3880147 B1 EP3880147 B1 EP 3880147B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- arm
- part support
- motor
- drive
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/018—By limiting the applied torque or force
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0192—Specific means for adjusting dimensions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
- A61H2201/1638—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1659—Free spatial automatic movement of interface within a working area, e.g. Robot
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5053—Control means thereof mechanically controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/06—Arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
Definitions
- the invention relates to a rehabilitation device.
- a rehabilitation device which is designed to operate in conjunction with one of the limbs of a user, wherein the user's limb in question has an endpoint.
- the rehabilitation device comprises a base, a robot arm which is attached to the base and which has an endpoint, wherein the robot arm has at least two active degrees of freedom relative to the base and is configured such that, while the base is suitably positioned relative to a user, the reference frame of the robot is oriented substantially similarly to the user's reference frame.
- the movements of the endpoint of the user's limb in question are mimicked by movements of the endpoint of the robot arm.
- the WO 2017/216075 A1 discloses a patient positioning device with a medical workstation for medical treatment of a patient, e.g., by means of radiation therapy.
- the patient is positioned on the designated patient couch, which is attached to the distal end element of a robot kinematics.
- the robot arm then moves the patient couch into the medical workstation so that the medical treatment can be performed.
- a rehabilitation device consisting of a wearable, robotic exoskeleton that can also be attached to a tripod using a bracket.
- the user can use the exoskeleton for therapeutic purposes, with the exoskeleton executing active movements and transmitting these to the user to move their joints.
- the exoskeleton can be used to enhance the user's active strength to perform a task.
- the object of the invention is to create a rehabilitation device which can be operated in a particularly safe manner despite its cost-effective construction.
- a rehabilitation device comprising a stand, a lifting column attached to the stand, a lifting carriage mounted on the lifting column in a height-adjustable manner, which is automatically vertically movable by means of a first drive of the rehabilitation device, a base arm pivotably mounted on the lifting carriage about a first, vertical axis of rotation, which is automatically driven to pivot about the first, vertical axis of rotation by means of a second drive of the rehabilitation device, a forearm pivotably mounted on the base arm about a second, vertical axis of rotation, which is automatically driven to pivot about the second, vertical axis of rotation by means of a third drive of the rehabilitation device, a connecting piece mounted on the forearm freely rotatable about a third, vertical axis of rotation, and a body part support tiltably mounted on the connecting piece about a fourth, horizontal axis of rotation, wherein the forearm is designed in two parts with a first, proximal forearm part and a second, distal for
- the connecting piece which is freely rotatable on the forearm about a third, vertical axis of rotation, is thus mounted on the forearm in a freely rotatable manner without being driven.
- Each drive of the rehabilitation device can be assigned to a single drivable joint of the rehabilitation device.
- each drive can be located in a link immediately upstream of the joint to be driven in the kinematic chain or in a link immediately downstream of the joint to be driven in the kinematic chain. If necessary, two or more drives for different joints can be located in the same link.
- the lifting carriage can have drives for moving both the base arm and the forearm.
- All drives can be driven automatically, in particular program-controlled, by a common control device of the rehabilitation device.
- the body part support can be tilted about the fourth horizontal axis of rotation by means of a spring body connecting the body part support to the connecting piece, wherein the spring body supports the body part support on the connecting piece in a spring-elastic manner in a predetermined basic position.
- the spring element can, for example, be a spring coil.
- Tilting the body part support means that the support surface can be rotated from its generally horizontal base position, so that the support surface is oriented either downwards or upwards.
- a downward or upward orientation can be measured along the longitudinal extent of the body part support and can be directed from a proximal end to a distal end.
- the tilting of the body part support can be achieved by a control device of the rehabilitation device controlling the fourth drive.
- the automatically driven movement of the body part support relative to the connecting piece can be coupled to the automatically driven height movement of the lifting carriage relative to the lifting column, in particular to the automatically driven height movement of the lifting carriage (4) and also to the pivoting movements of the base arm and the front arm.
- Coupling the movement of the body part support relative to the connecting piece with the vertical movement of the lifting carriage means that the vertical movement of the lifting carriage forms an input variable for controlling the tilting movement of the body part support.
- This tilting movement of the body part support can occur synchronously with the vertical movement of the lifting carriage.
- the tilting movement of the body part support can also occur asynchronously with the vertical movement of the lifting carriage, but with a predetermined other dependency on the vertical movement of the lifting carriage.
- the first drive can comprise a first motor arranged in the stand or in the lifting column, which is designed to raise and/or lower the lifting carriage on the lifting column in a motor-driven manner
- the rehabilitation device can have a mechanical coupling device which forms part of the fourth drive and which is designed to transmit a drive movement of the first motor to the body part support in such a way that during a lifting movement of the lifting carriage, driven by the first motor, the body part support executes a tilting movement synchronous to the lifting movement.
- the mechanical coupling device can in particular be designed to accommodate a lifting movement of the lifting carriage and to convert the lifting movement into a tilting movement of the body part support
- a conversion may also include a transmission, realized, for example, by a gearbox.
- the first drive can comprise a first motor arranged in the stand or in the lifting column, which is designed to raise and/or lower the lifting carriage on the lifting column in a motor-driven manner
- the fourth drive can have a fourth motor which is designed to transmit its drive movement to the body part support in order to carry out a tilting movement of the body part support, wherein the fourth motor is mechanically and/or control-technically coupled to the first motor in such a way that when the first motor is driven to move the lifting carriage relative to the lifting column, a simultaneously controlled movement of the fourth motor brings about a tilting movement of the body part support that is synchronous with the lifting movement.
- a control-technical coupling of the fourth motor with the first motor can be achieved, for example, via the control device of the rehabilitation device, which also controls the other drives of the rehabilitation device.
- control coupling of the fourth motor can be configured not only as a function of the first motor for moving the lifting carriage, but also as a function of a second motor for pivoting the base arm about a first axis of rotation and a third motor for pivoting the front arm about a second axis of rotation.
- the fourth motor is controlled not only as a function of the height position of the lifting carriage, but also as a function of the pivot positions of the base arm and the front arm.
- the plane of the armrest is always defined, for example, by the shoulder of a Person who has placed his or her arm on the armrest leaves.
- the body part support can be pivotally mounted about a horizontal fourth axis of rotation by means of an additional drive.
- the body part support can have a mechanically flexible element, such as a torsion and/or elastomer spring, which elastically preloads the body part support into a basic position.
- the rehabilitation device can have a cable pull to form a mechanical coupling of the tilting movement of the armrest to the height position of the lifting carriage.
- the cable pull has an automatically controllable motor and a spindle driven by the motor, which is designed to wind up a cable of the cable pull when the motor drives the spindle.
- a free end of the cable is connected to the body part support, and the rehabilitation device has a return spring designed to move the body part support into a basic position when the cable does not exert any tensile force on the body part support.
- at least one belt, a chain, or another coupling mechanism can also be provided to couple the tilting movement of the armrest to the height position of the lifting carriage.
- the rehabilitation device can comprise a linear drive having a linearly movable, automatically controllable actuator connected to the body part support, wherein the rehabilitation device also comprises a return spring designed to return the body part support to a basic position to move when the actuator does not exert any pulling force on the body part support.
- the rehabilitation device can have a rotary drive which has a rotatable, automatically controllable shaft which is connected to the body part support, wherein the rehabilitation device also has a return spring which is designed to move the body part support into a basic position when the shaft does not exert any torque on the body part support.
- the second drive may generally comprise a second motor
- the third drive may comprise a third motor
- the first motor, the second motor and the third motor are controlled by a common control device of the rehabilitation device in a compliance control, in particular an impedance control or an admittance control.
- Force- and/or torque-controlled operation of the drives or motors can be achieved, for example, using impedance control or admittance control.
- Admittance control is based on an existing position control of the rehabilitation device's positions at the joint level of the rehabilitation device. The generalized forces acting externally on the rehabilitation device are measured. Based on these forces, a movement of the rehabilitation device corresponding to the desired dynamic behavior is determined, which is then commanded to the drives or motors via inverse kinematics and the underlying position control.
- impedance control is based on an existing torque control. At the joint level.
- the deviation of the actual position from a defined target position is measured, and a desired generalized force, or forces and moments, is determined based on the desired dynamic behavior.
- This force can be mapped to corresponding joint torques using the known kinematics of the rehabilitation device.
- the torques can then be adjusted using the underlying torque control.
- the rehabilitation device is in particular a so-called serial kinematics, in which the limbs and joints of the rehabilitation device are arranged alternately in series one behind the other.
- the second drive may comprise a second motor
- the third drive may comprise a third motor
- the second motor and the third motor are controlled by a common control device of the rehabilitation device in a compliance control, in particular impedance control or admittance control, and the first motor is controlled in a position-controlled manner by the control device.
- the rehabilitation device may comprise a stop device configured to limit both a maximum pivot angle of the base arm about the first vertical axis of rotation and a maximum pivot angle of the forearm about the second vertical axis of rotation, both with respect to the base arm and with respect to the lifting carriage.
- the forearm is connected via mechanical or control couplings is coupled to the lifting carriage.
- the forearm can be coupled to the lifting carriage by means of parallelogram links and/or belts.
- a movement limitation by means of a stop device can thus preferably be implemented via the mechanical or control-technical coupling. This allows, for example, three limitations to be implemented in a subsystem with two degrees of freedom of the rehabilitation device.
- the forearm can generally be mounted on the base arm by means of a second joint so as to be pivotable about the second axis of rotation, wherein the second joint is designed to mount the forearm above the base arm in all pivot positions of the forearm, and the connecting piece is mounted on the forearm so as to be pivotable about the third axis of rotation by means of a third joint, wherein the third joint is designed to mount the connecting piece above the forearm in all pivot positions of the connecting piece, and the body part support is mounted on the connecting piece so as to be tiltable about the fourth axis of rotation by means of a fourth joint, wherein the fourth joint is designed to mount the body part support above the forearm in all pivot positions of the body part support.
- a distal end section of the base arm and/or a proximal end section of the forearm, on which the second axis of rotation is arranged, can be designed to be cranked in such a way that, in a superimposed relative position of the base arm and forearm, a gap acting as a clamping protection is formed between the base arm and forearm.
- a supplementary additional clamping protection can be achieved or improved by the fact that in an overlapping position of the base arm and the forearm facing each other Surfaces of the base arm and forearm are each covered with an elastic layer.
- the forearm is additionally formed in two parts with a first, proximal forearm part and a second, distal forearm part, wherein the second, distal forearm part is mounted on the first, proximal forearm part in a detachable and interchangeable manner such that the second, distal forearm part can be rigidly fastened to the first, proximal forearm part either in a first orientation or in a second orientation which deviates from the first orientation, in particular is rotated by 180 degrees relative to the first orientation.
- Reconnecting the second, distal forearm part to the first, proximal forearm part can be done by a snap/locking connection, which in a locked state connects the second, distal forearm part in a form-fitting and rigid manner to the first, proximal forearm part and in an unlocked state the second, distal forearm part can be manually removed from the first, proximal forearm part and reconnected in a different orientation.
- the body part support can also be mounted on the intermediate piece in a manner that allows it to be removed from the intermediate piece.
- the joint connecting the body part support to the intermediate piece can be designed to be detachable.
- the body part support can optionally be designed as an arm support, a hand support or a leg support.
- the aim of the invention is to present a novel robotic system for rehabilitation applications that is powerful, sensitive, and simultaneously safe.
- This robotic system should be significantly more cost-effective than comparable known solutions, making it economically viable not only for commercial users but also for private use.
- the basic idea of this invention is a novel, targeted combination of special kinematics with special drive distribution and structure, weight support and individually adjustable ranges of motion.
- the rehabilitation arm is designed to be movable in five degrees of freedom, with the end effector representing the connection to the patient's arm, in particular a person's forearm or hand, and being movable in all three translational and two rotational degrees of freedom.
- the two rotational degrees of freedom describe a rotation of, for example, the forearm around a spatially fixed vertical axis and a co-moving horizontal axis that is always perpendicular to the longitudinal direction of the forearm.
- free or guided rotation of the forearm around its longitudinal axis is prevented by fixing the forearm in a shell support connected to the robot.
- a fixed position of the forearm or hand can be freely selected in advance and should correspond to the most ergonomic posture possible, appropriate for the respective therapy.
- the five degrees of freedom of the specific variant of the rehabilitation arm described here are achieved by five serially arranged joints.
- the first joint is spatially fixed and describes a vertical translation. It is actuated by a motion command from the controller.
- the second joint is formed by a rotation axis, which describes an actuated controlled rotational movement around the vertical axis.
- the third joint is also formed by a rotation axis. This is essentially parallel to the rotation axis of the second joint and spaced apart from it. It also describes an actuated, rotary movement around a vertical axis.
- the fourth joint is also formed by a rotation axis. This, too, is essentially parallel to the second and third joints and spaced apart from them. It also describes a rotational movement around the vertical axis, but is passive, i.e., without a drive. It is forced or predetermined by the position of the patient's arm.
- the fifth joint is also formed by a rotation axis and is more of a tilt axis. This is essentially perpendicular to the rotation axis of the fourth joint and is oriented horizontally.
- the movement of the axis can be controlled by a control system or mechanically coupled, and can be passively free or passively spring-supported.
- the structure described here differs fundamentally from known designs of other rehabilitation arms or SCARA robots, as it reveals a serial joint structure that includes both active and at least one passive joint and is therefore kinematically and drive-wise underdetermined.
- At least one passive joint is located within the kinematic chain, i.e. not at the distal or proximal end of the kinematic chain.
- the rehabilitation robot i.e., the rehabilitation device
- the rehabilitation robot can also be controlled in impedance mode, among other things. This primarily affects the base joints for moving the lifting carriage, the base arm, and the forearm, which determine the position and forces on the patient's arm in space.
- the tilting joint is simpler in its basic design and is purely position-controlled. The tilting joint determines the inclination of the armrest, which is intended to support and guide the patient so that they cannot perform inadmissible balancing or compensatory movements, for example with the forearm.
- the armrest is tilted downward for hand positions above the shoulder and upward for hand positions below the shoulder, so that a plane always passes through the patient's shoulder.
- This plane is spanned by the tilting joint and the longitudinal shape of the armrest and has its origin in the TCP, i.e., in the patient's hand.
- the horizontal distance of the hand from the shoulder is also crucial for the inclination.
- the inclination can be set either mechanically coupled or controlled in the tilting joint.
- the position and thus the movement of the lifting carriage in the vertical direction can be detected, converted and transmitted to the tilting joint.
- This can be achieved, for example, via a traction mechanism structure, in particular a cable fixed on both sides in the linear axis, which drives a cable pulley mounted on the carriage when the lifting carriage moves.
- This rapid rotary movement can be reduced using a simple gear according to the transmission ratio and drive another pulley or lever on the output side, which, for example, actuates another traction mechanism, in particular a Bowden cable.
- This Bowden cable is guided forward via the joints and transmits the movement directly to the tilting joint by means of a lever or cable pulley.
- the inclination can be reset either actively, using a dual structure for both directions of movement, or passively, with gravity or a spring always pulling the armrest in one direction and thus keeping the drive cable of the Bowden cable taut.
- a drive can drive the tilting joint either as a geared motor directly or with spring support, be designed as a slider-crank kinematic including an actuating cylinder, or be operated on one side via a cable pull. with a pulley.
- the latter can be achieved, for example, by placing a drive with a driving pulley in the forearm and guiding a cable through the third pivot axis, which engages the armrest via a lever arm.
- the armrest is always pressed downwards in the opposite direction by a spring.
- the cable pulls the support upwards against the weight of the patient's arm so that the correct inclination is set.
- Such a one-sided acting design is not only cost-effective, but also has advantages in terms of safe operation, since the support can be freely moved upwards by the patient or can simply fold away from below in the event of a collision.
- the inclination of the support serves purely as ergonomic support for the forearm, relieving strain on the patient and guiding the patient to correctly execute the movement. Therefore, in addition to the described design, targeted flexibility in the drive train of the tilting joint or integrated downstream into the support can advantageously contribute to natural movement behavior.
- the lifting carriage and the base arm serve the main movement in the plane and are driven, for example, by stepper motors with a low-ratio belt drive, for example, less than 1:10, especially 1:5. This results in a very direct control behavior, in which the drive is loaded directly with external torques with virtually no loss.
- a previously determined static and dynamic model of the motor with regard to its torque curve which includes at least motor currents and armature position or rotor angle, can be used to estimate the torque acting on the motor side at each joint. Disturbances such as cogging torques, temperature, belt influences, friction, etc. can also be modeled. These measured joint torques can be used to calculate the input force acting on the armrest in the robot's dynamics equations. These external forces can be calculated using the Newton-Euler method, for example.
- Additional force-measuring sensors are not generally necessary for planar movement in this embodiment.
- the vertical force can also be used, analyzed, and evaluated for therapeutic purposes and as movement input.
- the motor current and the armature position can also be used for this purpose.
- a simple one-dimensional force sensor can be integrated distally in the area of the armrest in order to improve measurement accuracy in this direction through shorter force paths.
- This sensor can, for example, be installed in the joint between the forearm and the connecting piece in such a way that the entire axial bearing force, i.e., in particular tension and compression, is transmitted via the sensor. If the sensor can only measure a compressive force, the measuring point must be preloaded accordingly using a spring.
- the rehabilitation robot ie the rehabilitation device of this invention, concerns the drive train for the joint between the base arm and the forearm.
- the drive can be mounted in particular in the lifting carriage.
- a first belt stage can be provided, which translates the drive movement, in particular at a ratio of 1:10 or 1:5, to a pulley that is coaxial with the first rotational axis between the lifting carriage and the base arm.
- a further belt with a ratio of 1:1 The transmission transmits the rotary movement to the joint between the base arm and the forearm. This has various advantages over a direct drive and support of the drive torque via the base arm.
- the belt forms a closed partial chain, which significantly reduces the drive torque on the swivel drive between the lifting carriage and the base arm and increases the accuracy of the arm.
- heavy components such as drives are shifted in the proximal direction, which reduces the moving mass. This also has a positive influence on drive power and safety aspects.
- a design of this type can be used to implement a targeted concept of specifically set movement limits. This is possible because the described belt design allows the following movement limits to be set as fixed but adjustable stops. The movement limits can limit the base arm relative to the lifting carriage, limit the forearm relative to the base arm and at the same time even limit the forearm relative to the lifting carriage.
- the lifting carriage has only one translational degree of freedom and the base arm and the forearm are moved by pivot joints, it can also be said that the absolute movement of the base arm can be restricted, and for the forearm, both the relative and absolute movement can be restricted.
- This allows not only the range of motion of the tool center point (TCP), i.e. the patient's hand, to be restricted very specifically, but also that of the robot's limbs. This keeps the robot away from the patient and prevents unwanted collisions.
- TCP tool center point
- the robot's limbs This keeps the robot away from the patient and prevents unwanted collisions.
- the therapy configuration left or right, depending on the therapy range of motion, the patient size and/or the patient's position to the Robots, ie rehabilitation devices, these axis limits can be easily adjusted.
- the drive power built into the robot is very low, meaning that the robot cannot cause any harm to humans. This is possible because the main drives, due to their vertically aligned rotation axes, are not subject to gravitational influence, meaning that only process forces, i.e., therapy forces, and only a small amount of inertial and friction forces act here.
- the lifting drive must be designed to be significantly more powerful, as it is subject to process, friction, and inertial forces, as well as the weight of the patient arm and the robot. The latter make up by far the largest portion of the drive load, but have the property that they are independent of the robot position and remain constant during therapy.
- a balancing system can absorb this weight force completely or partially via an energy storage device, particularly a spring-based energy storage device, thus enabling the use of a smaller, less powerful drive for the lifting column.
- All movable robot limbs in particular the base arm and the forearm, can be covered completely or partially, in particular laterally and/or on the underside or top side, with a flexible shock-absorbing material.
- the robot arm can be equipped with a linear contact or non-contact sensor, particularly a safety edge, on the underside of the base arm and the front arm, as well as on the lifting carriage if necessary.
- This sensor detects that the entire arm has collided with the patient or an object, such as a table, during lowering. Appropriate control settings can be used to respond to this in a safety-related manner.
- a smaller lifting column not only offers advantages in design, transport, and cost, but also in stability.
- the lifting column has In the lower area, for example, there are several feet, which in one design variant can be further stabilized with removable weights.
- These removable weights can be designed as hollow bodies filled with water or sand, which need to be refilled after transport. They are connected to the feet or column and, as counterweights, increase the stability of the structure.
- the feet are designed with rollers, for example, so that these can either be blocked at the destination or the base can be lowered.
- the patient seat can also be used to increase the stability of the robot base by placing the seat, chair or block on an area of the base or mechanically connecting it to it, for example by means of a locking mechanism.
- the rehabilitation arm setup presented here offers maximum flexibility and versatility in therapy. For example, the patient can sit directly next to the arm, at a distance from it, or directly in front of it. All other patient positions are also possible. This setup can also be used for both right and left arm therapy without any modifications, with the possible exception of adjusting the axis stops.
- the orientation can be rotated by 180°, for example, so that the armrest can point downwards or pointing upwards. This also allows for other exercises in a different range of motion.
- the armrest can be modified and/or adapted, for example as a modular system, and can also include additional mobility or arm support depending on the design.
- the body part support can be designed in at least two parts with at least one arm rest and at least one hand rest, wherein both the arm rest has a first coupling device that interacts magnetically with a first body part cuff through magnetic adhesive force, and the hand rest has a second coupling device that interacts magnetically with a second body part cuff through magnetic adhesive force.
- the first body part cuff can have a first counter-coupling device and the second body part cuff can have a second counter-coupling device.
- the pair of first coupling device and first negative feedback device, or the pair of second coupling device and second negative feedback device can be at least a pairing of a magnet with a ferromagnetic iron piece or a pairing of two magnets interacting with opposite polarity. Accordingly, the first coupling device, the second coupling device, the first negative feedback device, and/or the second negative feedback device can optionally comprise a magnet and/or a ferromagnetic iron piece.
- This technical solution for connecting body part cuffs to the armrest consists, in particular, of a double magnetic coupling of the forearm or hand to the armrest or handrest.
- the patient puts one or two bandages, i.e., the cuffs, on the wrist and/or forearm prior to the exercise.
- These cuffs are individually designed and remain with the patient even after the exercise.
- Both bandages or cuffs each contain at least one magnetic element, i.e., a counter-coupling device, which can be connected to a coupling partner/counterpart (metal or also a magnet), i.e., the coupling devices on the armrest and/or handrest, by simply bringing them closer together using magnetic force.
- the armrest or handrest can be designed to have a handle that can be freely rotated about an axis essentially parallel to the main extension of the armrest. This allows for individual adjustment of an ergonomic hand orientation and forearm posture and extends the degrees of freedom of the rehabilitation arm to six.
- the handle can also have a sensor, such as a simple photodiode or a button, to detect the patient's resting hand. If the hand is released from the handle, the rehabilitation device stops. When the hand is reattached, the movement is resumed after an acknowledgement, a signal, or a defined period of time.
- the armrest can have a forearm support, which also offers the possibility of magnetic coupling. It can be used for lateral guidance of the forearm For example, it can be designed as a semicircular, open shell. Here, a single pair of magnets is sufficient and does not restrict wrist mobility. In other words, regardless of the grip position (e.g., 0°, 45°, 90°) adopted by the patient, the alignment of the coupling point between the forearm and the forearm support remains constant, so that all grip positions can be achieved with just one forearm coupling point.
- the grip position e.g., 0°, 45°, 90°
- the magnetic connections can, for example, be designed as flat surfaces of the coupling partners (first/second coupling device, first/second counter-coupling device) and/or have certain shaped elements that interlock in order to be able to better absorb lateral forces.
- the supports can also include sensors for measuring and monitoring vital functions.
- these sensors When coupled to the armrest, these sensors are powered via an electrical interface and transmit data to a control unit of the rehabilitation device, allowing targeted responses to the patient's physical condition.
- these vital function measurements can also be stored along with the movement data and transmitted to a therapist for evaluation.
- the sensors can also be equipped with batteries that are charged via the interface to the armrest and continue to record further measurements even after active therapy.
- the bandages ie the cuffs
- an NFC element such as an RFID tag
- the patient wishes to move away from the rehabilitation device or release it, they simply need to pull their arm out of the armrest. This can be done either by using the arm itself or with the help of the other arm. A movement against the magnetic force, for example, along the normal direction, or by twisting or sliding the magnets can easily release the device.
- the entire armrest can be separated by simply pulling it out axially and changed for other therapy applications.
- mechanical latches, hook-and-loop fasteners, or vacuum-based connections such as suction cups can also be used as coupling elements.
- magnetic coupling is preferred in a specific embodiment.
- novel robot system for rehabilitation applications presented here despite sufficient performance, especially with regard to a therapy force, can be constructed very safely and yet extremely cost-effectively compared to known solutions and is suitable for a variety of rehabilitation, training and therapy measures.
- the Fig. 1 shows an exemplary basic embodiment of a rehabilitation device 1 according to the invention.
- the rehabilitation device 1 comprises a stand 2, a lifting column 3 fastened to the stand 2, a lifting carriage 4 mounted on the lifting column 3 in a height-adjustable manner, which is automatically vertically movable by means of a first drive of the rehabilitation device 1, a base arm 5 pivotably mounted on the lifting carriage 4 about a first, vertical axis of rotation D1, which is automatically driven to pivot about the first, vertical axis of rotation D1 by means of a second drive of the rehabilitation device 1, a forearm 6 pivotably mounted on the base arm 5 about a second, vertical axis of rotation D2, which is automatically driven to pivot about the second, vertical axis of rotation D2 by means of a third drive of the rehabilitation device 1, a connecting piece 7 mounted on the forearm 6 so as to be freely rotatable about a third, vertical axis of rotation D3, and a connecting piece 7 pivotable on the connecting piece 7 about a fourth, horizontal axi
- the tripod 2 has legs 9, in the case of the present embodiment four legs 9. On the legs 9, weights 10 can be attached as shown to increase the stability, ie the stability of the rehabilitation device 1.
- the support legs 9 can optionally, as in Fig. 2 shown, be provided with feet 11. Instead of feet 11, casters can also be provided, which enable easy manual movement of the rehabilitation device 1.
- the casters can be designed with brakes.
- the body part support 8 is designed as a forearm support to which a forearm of a person 12 is strapped.
- the Fig. 2 shows, in a slightly modified embodiment of the rehabilitation device 1, the degrees of freedom of the rehabilitation device 1.
- the rehabilitation device 1 comprises a tripod 2, a lifting column 3 fastened to the tripod 2, a lifting carriage 4 mounted on the lifting column 3 in a height-adjustable manner, which is automatically vertically movable by means of a first drive of the rehabilitation device 1, a base arm 5 pivotably mounted on the lifting carriage 4 about a first, vertical axis of rotation D1, which is automatically driven to pivot about the first, vertical axis of rotation D1 by means of a second drive of the rehabilitation device 1, a forearm 6 pivotably mounted on the base arm 5 about a second, vertical axis of rotation D2, which is automatically driven to pivot about the second, vertical axis of rotation D2 by means of a third drive of the rehabilitation device 1, a connecting piece 7 mounted on the forearm 6 so as to be freely rotatable about a third, vertical axis of rotation D3, and a the connecting piece 7 about a fourth, horizontal axis
- the forearm 6 is pivotally mounted on the base arm 5 by means of a second joint G2 about the second axis of rotation D2, wherein the second joint G2 is designed to mount the forearm 6 in all pivot positions of the forearm 6 above the base arm 5, wherein the connecting piece 7 is pivotally mounted on the forearm 6 by means of a third joint G3 about the third axis of rotation D3, wherein the third joint G3 is designed to mount the connecting piece 7 in all pivot positions of the connecting piece 7 above the forearm 6, wherein the body part support 8 is tiltably mounted on the connecting piece 7 by means of a fourth joint G4 about the fourth axis of rotation D4 (arrow P1), wherein the fourth joint G4 is designed to mount the body part support 8 in all pivot positions of the body part support 8 above the forearm 6.
- the three possible basic pivot positions of the body part support 8 are shown in Fig. 4
- the body part support 8 can be Fig. 4 shown above, with its support surface sloping towards the forearm 6.
- the body part support 8 can be Fig. 4 shown in the middle, with its support surface horizontally aligned.
- the body part support 8 can be Fig. 4 shown below, with its support surface pointing away from the forearm 6, ie oriented upwards.
- the Fig.3 also shows how a distal end section E1 of the base arm 5 and/or a proximal end section E2 of the forearm 6, at which transition the end sections E1 and E2 the second axis of rotation D2 is arranged, are designed to be cranked, such that in a superimposed relative Position of base arm 5 and front arm 6, as in Fig. 3 shown, a gap S acting as a pinch protection is formed between the base arm 5 and the folded-in front arm 6 shown in dashed lines.
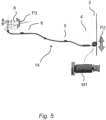
- Fig. 5 to Fig. 8 In each case it is shown how the body part support 8 is to be tilted about the fourth, horizontal axis of rotation D4 by means of a spring body 13 connecting the body part support 8 to the connecting piece 7, wherein the spring body 13 supports the body part support 8 in a predetermined basic position, as shown, in a spring-elastic manner on the connecting piece 7.
- the body part support 8 can be automatically driven by a fourth drive of the rehabilitation device 1 to tilt about the fourth, horizontal axis of rotation D4.
- the automatically driven movement of the body part support 8 relative to the connecting piece 7 can be coupled to the automatically driven height movement of the lifting carriage 4 relative to the lifting column 3.
- the first drive can comprise a first motor M1 arranged in the stand 2 or in the lifting column 3, which is designed to raise and/or lower the lifting carriage 4 on the lifting column 3 in a motor-driven manner
- the rehabilitation device 1 can have a mechanical coupling device 14 which forms part of the fourth drive and which is designed to transmit a drive movement of the first motor M1 to the body part support 8 in such a way that during a lifting movement (arrow P2) of the lifting carriage 4, driven by the first motor M1, the body part support 8 executes a synchronous tilting movement (arrow P3).
- the first drive can comprise a first motor arranged in the stand 2 or in the lifting column 3, which is designed to raise and/or lower the lifting carriage 4 on the lifting column 3 in a motor-driven manner
- a fourth drive can have a fourth motor M4, which is designed to transmit its drive movement to the body part support 8 in order to carry out a tilting movement of the body part support 8, wherein the fourth motor M4 is coupled to the first motor in terms of control technology in such a way that when the first motor drives the lifting carriage 4 relative to the lifting column 3, a simultaneously controlled movement of the fourth motor M4 brings about a tilting movement of the body part support 8 that is synchronous with the lifting movement.
- the rehabilitation device 1 has a cable pull 15 which has an automatically controllable motor M4 and a spindle 16 driven by the motor M4, which is designed to wind up a cable 17 of the cable pull 15 when the motor M4 drives the spindle 16, wherein a free end of the cable 17 is connected to the body part support 8, and having a return spring 13 which is designed to move the body part support 8 into a basic position when the cable 17 does not exert any tensile force on the body part support 8.
- the rehabilitation device 1 has a linear drive 18 which has a linearly movable, automatically controllable actuator 19 which is connected to the body part support 8, and has a return spring 13 which is designed to move the body part support 8 into a basic position, when the actuator 19 does not exert any tensile force on the body part support 8.
- the rehabilitation device 1 has a rotary drive 20 which has a rotatable, automatically controllable shaft which is connected to the body part support 8, and has a return spring 13 which is designed to move the body part support 8 into a basic position when the shaft does not exert any torque on the body part support 8.
- the Fig. 9 shows the rehabilitation device 1 according to Fig.1 in a configuration to the left of person 12.
- the Fig. 10 shows the rehabilitation device 1 according to Fig.1 in a configuration to the right of person 12.
- the Fig. 11 and Fig. 12 show how the forearm 6 is formed in two parts with a first, proximal forearm part 6.1 and a second, distal forearm part 6.2, wherein the second, distal forearm part 6.2 is mounted on the first, proximal forearm part 6.1 in a detachable and repositionable manner such that the second, distal forearm part 6.2 can be selectively positioned in a first orientation, as in Fig. 11 shown, is to be rigidly attached to the first, proximal forearm part 6.1 or in a second orientation, as shown in Fig. 12 shown, is to be rigidly attached to the first, proximal forearm part 6.1, which deviates from the first orientation, in particular is rotated by 180 degrees with respect to the first orientation.
- the Fig. 16a and Fig. 16b illustrate how the body part support 8 is designed at least in two parts with at least one arm support 8.1 and at least one hand support 8.2, wherein both the armrest 8.1 has a first coupling device 23.1 which interacts magnetically with a first body part cuff 21 through magnetic adhesive force, and the handrest 8.2 has a second coupling device 23.2 which interacts magnetically with a second body part cuff 22 through magnetic adhesive force.
- the first body part cuff 21 can have a first counter-coupling device 24.1 and the second body part cuff 22 can have a second counter-coupling device 24.2.
- the pair of first coupling device 23.1 and first negative feedback device 24.1, or the pair of second coupling device 23.2 and second negative feedback device 24.2, can be at least a pairing of a magnet with a ferromagnetic iron piece or a pairing of two magnets interacting with opposite polarity.
- the first coupling device 23.1, the second coupling device 23.2, the first negative feedback device 24.1, and/or the second negative feedback device 24.2 can optionally comprise a magnet and/or a ferromagnetic iron piece.
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Rehabilitation Tools (AREA)
Description
- Die Erfindung betrifft eine Rehabilitationsvorrichtung.
- Aus der
WO 2015/048688 A1 ist eine Rehabilitationsvorrichtung bekannt, die ausgebildet ist zum Betrieb in Verbindung mit einem der Gliedmaßen eines Benutzers, wobei das betreffende Glied des Benutzers einen Endpunkt aufweist. Die Rehabilitationsvorrichtung umfasst eine Basis, einen Roboterarm, der an der Basis befestigt ist und der einen Endpunkt aufweist, wobei der Roboterarm mindestens zwei aktive Freiheitsgrade relativ zu der Basis aufweist und so konfiguriert ist, dass während die Basis relativ zu einem Benutzer geeignet positioniert ist, der Referenzrahmen des Roboters im Wesentlichen gleichartig wie der Bezugsrahmen des Benutzers ausgerichtet ist. Die Bewegungen des Endpunkts des betreffenden Glieds des Benutzers werden durch Bewegungen des Endpunkts des Roboterarms dabei nachgeahmt. - Die
WO 2018/086748 A2 offenbart einen Roboterarm mit Logistiksystem, der mittels einer Hubvorrichtung auf einer mobilen Plattform befestigt ist. Der Roboterarm ist dabei zum Transport eines Warenträgers ausgebildet und dient zum Transport bzw. zum Ent- oder Beladen von Waren im Logistikbereich. - Die
WO 2017/216075 A1 offenbart eine Patientenpositioniervorrichtung mit medizinischen Arbeitsplatz zur medizinischen Behandlung eine Patienten z.B. mittels Strahlentherapie. Der Patient wird dabei auf der dafür vorgesehenen Patientenliege gelagert, die am distalen Endglied einer Roboterkinematik befestigt ist. Der Roboterarm bewegt dann die Patientenliege derart in den medizinischen Arbeitsplatz, dass die medizinische Therapie durchgeführt werden kann. - Aus der
US 2012/0179075 A1 ist ebenfalls eine Rehabilitationsvorrichtung bestehend aus einem tragbaren, robotischen Exoskelett, das auch durch eine Halterung an einem Stativ befestigt werden kann. Der Anwender kann dabei das Exoskelett zu therapeutischen Zwecken einsetzen, wobei das Exoskelett aktive Bewegungen ausführt und diese auf den Anwender überträgt um dessen Gelenke zu bewegen. In einer weiteren Anwendung kann das Exoskelett zur Verstärkung der aktiven Kraft eines Anwenders zur Erfüllung einer Aufgabe. - Aufgabe der Erfindung ist es, eine Rehabilitationsvorrichtung zu schaffen, die trotz kostengünstigen Aufbaus in besonders sicherer Weise betrieben werden kann.
- Diese Aufgabe wird erfindungsgemäß gelöst durch eine Rehabilitationsvorrichtung, aufweisend ein Stativ, eine an dem Stativ befestigte Hubsäule, einen an der Hubsäule höhenverstellbar gelagerten Hubschlitten, der mittels eines ersten Antriebs der Rehabilitationsvorrichtung automatisch höhenbeweglich ist, einen an dem Hubschlitten um eine erste, vertikale Drehachse schwenkbar gelagerten Grundarm, der mittels eines zweiten Antriebs der Rehabilitationsvorrichtung automatisch angetrieben um die erste, vertikale Drehachse zu schwenken ist, einen an dem Grundarm um eine zweite, vertikale Drehachse schwenkbar gelagerten Vorderarm, der mittels eines dritten Antriebs der Rehabilitationsvorrichtung automatisch angetrieben um die zweite, vertikale Drehachse zu schwenken ist, ein an dem Vorderarm um eine dritte, vertikale Drehachse frei drehbar gelagertes Verbindungsstück, und eine an dem Verbindungsstück um eine vierte, horizontale Drehachse kippbar gelagerte Körperteilauflage wobei der Vorderarm zweiteilig mit einem ersten, proximalen Vorderarmteil und einem zweiten, distalen Vorderarmteil ausgebildet ist, wobei der zweite, distale Vorderarmteil an dem ersten, proximalen Vorderarmteil lösbar und derart umsteckbar gelagert ist, dass der zweite, distale Vorderarmteil wahlweise in einer ersten Orientierung an dem ersten, proximalen Vorderarmteil starr zu befestigen ist oder in einer zweiten Orientierung an dem ersten, proximalen Vorderarmteil starr zu befestigen ist, die von der ersten Orientierung abweicht, insbesondere gegenüber der ersten Orientierung um 180 Grad gedreht ist.
- Das an dem Vorderarm um eine dritte, vertikale Drehachse frei drehbare Verbindungsstück ist somit an dem Vorderarm unangetrieben frei drehbar gelagert.
- Jeder Antrieb der Rehabilitationsvorrichtung kann einem einzelnen antreibbaren Gelenk der Rehabilitationsvorrichtung zugeordnet sein. Jeder Antrieb kann beispielsweise in einem dem anzutreibenden Gelenk in der kinematischen Kette unmittelbar vorgelagerten Glied angeordnet sein oder in einem dem anzutreibenden Gelenk in der kinematischen Kette unmittelbar nachgelagerten Glied angeordnet sein. Gegebenenfalls können zwei oder mehr Antriebe für verschiedene Gelenke in demselben Glied angeordnet sein. Insbesondere der Hubschlitten kann Antriebe sowohl zum Bewegen des Grundarms als auch zum Bewegen des Vorderarms aufweisen.
- Alle Antriebe können von einer gemeinsamen Steuerungsvorrichtung der Rehabilitationsvorrichtung automatisch angetrieben werden, insbesondere programmgesteuert angetrieben werden.
- Die Körperteilauflage bildet ein Verbindungsglied, um die Rehabilitationsvorrichtung an einen Körperteil einer zu behandelnden Person ankoppeln zu können. Ein Ankoppeln kann bereits dadurch erfolgen, dass die Person eines ihrer Körperteile, wie beispielsweise die Hand, den Unterarm oder das Bein auf einer Auflagefläche der Körperteilauflage auflegt. Die Körperteilauflage kann ein Befestigungsmittel, wie beispielsweise wenigstens einen zurrbaren Riemen, aufweisen, der ausgebildet ist, zum lösbaren Befestigen des Körperteile der Person an der Körperteilauflage.
- Die Körperteilauflage kann mittels eines die Körperteilauflage mit dem Verbindungsstück verbindenden Federkörpers um die vierte, horizontale Drehachse zu kippen sein, wobei der Federkörper die Körperteilauflage in eine vorgegebene Grundstellung federelastisch rückstellbar an dem Verbindungsstück lagert.
- Der Federkörper kann beispielsweise eine Federwendel sein. Ein Kippen der Körperteilauflage bedeutet, dass die Auflagefläche aus ihrer im Allgemeinen horizontalen Grundstellung heraus gedreht werden kann, so dass die Auflagefläche entweder abschüssig oder ansteigend orientiert ist. Eine abschüssig oder ansteigend Orientierung kann sich dabei an einer Längserstreckung der Körperteilauflage bemessen und dabei ausgehend von einem proximalen Ende zu einem distalen Ende hin gerichtet sein.
- Die Körperteilauflage kann mittels eines vierten Antriebs der Rehabilitationsvorrichtung automatisch angetrieben um die vierte, horizontale Drehachse zu kippen sein, insbesondere mittels eines dem vierten Antrieb zugeordneten mechanisch nachgiebigen Elements zu kippen sein, das die Körperteilauflage in eine Grundstellung elastisch vorspannt.
- Das Kippen der Körperteilauflage kann dadurch erfolgen, dass eine Steuerungsvorrichtung der Rehabilitationsvorrichtung den vierten Antrieb ansteuert.
- Die automatisch angetriebene Bewegung der Körperteilauflage relativ zum Verbindungsstück kann an die automatisch angetriebene Höhenbewegung des Hubschlittens relativ zur Hubsäule gekoppelt sein, insbesondere an die automatisch angetriebene Höhenbewegung des Hubschlittens (4) und auch an die Schwenkbewegungen des Grundarms und des Vorderarms gekoppelt sein.
- Eine Koppelung der Bewegung der Körperteilauflage relativ zum Verbindungsstück mit der Höhenbewegung des Hubschlittens bedeutet, dass die Höhenbewegung des Hubschlittens eine Eingangsgröße bildet zum Ansteuern der Kippbewegung der Körperteilauflage. Diese Kippbewegung der Körperteilauflage kann synchron zur Höhenbewegung des Hubschlittens erfolgen. Alternativ kann die Kippbewegung der Körperteilauflage auch asynchron zur Höhenbewegung des Hubschlittens erfolgen, aber in einer vorbestimmten anderen Abhängigkeit zur Höhenbewegung des Hubschlittens stehen.
- Der erste Antrieb kann einen im Stativ oder in der Hubsäule angeordneten ersten Motor umfassen, der ausgebildet ist, den Hubschlitten motorisch angetrieben an der Hubsäule zu heben und/oder zu senken, und die Rehabilitationsvorrichtung kann dabei eine mechanische Kopplungseinrichtung aufweisen, die einen Teil des vierten Antriebs bildet und die ausgebildet ist, eine Antriebsbewegung des ersten Motors auf die Körperteilauflage zu übertragen, derart, dass bei einer Hubbewegung des Hubschlittens, angetrieben durch den ersten Motor, die Körperteilauflage eine zur Hubbewegung synchrone Kippbewegung ausführt.
- Die mechanische Kopplungseinrichtung kann insbesondere ausgebildet sein eine Hubbewegung des Hubschlittens aufzunehmen und die Hubbewegung in eine Kippbewegung der Körperteilauflage umsetzen. Ein solches Umsetzen kann auch eine Übersetzung, realisiert beispielsweise durch ein Getriebe, beinhalten.
- Der erste Antrieb kann einen im Stativ oder in der Hubsäule angeordneten ersten Motor umfassen, der ausgebildet ist, den Hubschlitten motorisch angetrieben an der Hubsäule zu heben und/oder zu senken, und der vierte Antrieb kann dabei einen vierten Motor aufweisen, der ausgebildet ist, seine Antriebsbewegung auf die Körperteilauflage zur Ausführung einer Kippbewegung der Körperteilauflage zu übertragen, wobei der vierte Motor mechanisch und/oder steuerungstechnisch mit dem ersten Motor gekoppelt ist, derart, dass bei einer Antriebsbewegung des ersten Motors, um den Hubschlitten relativ zur Hubsäule zu bewegen, eine gleichzeitig angesteuerte Bewegung des vierten Motors eine zur Hubbewegung synchrone Kippbewegung der Körperteilauflage bewirkt.
- Eine steuerungstechnische Koppelung des vierten Motors mit dem ersten Motor kann beispielsweise über die Steuerungsvorrichtung der Rehabilitationsvorrichtung erfolgen, die auch die weiteren Antriebe der Rehabilitationsvorrichtung ansteuert.
- In einer Weiterbildung kann eine steuerungstechnische Kopplung des vierten Motors statt allein in Abhängigkeit des ersten Motors zum Bewegen des Hubschlittens, auch in Abhängigkeit eines zweiten Motors zum Schwenken des Grundarms um eine erste Drehachse und eines dritten Motors zum Schwenken des Vorderarms um eine zweite Drehachse eingerichtet sein. Dadurch wird der vierte Motor nicht nur in Abhängigkeit der Höhenstellung des Hubschlittens, sondern auch in Abhängigkeit der Schwenklagen des Grundarms und des Vorderarms angesteuert. Dabei kann insbesondere vorgesehen sein, dass die Ebene der Armauflage beispielsweise stets durch die Schulter einer Person, die ihren zugehörigen Arm auf der Armauflage abgelegt hat, geht.
- Die Körperteilauflage kann mittels eines weiteren Antriebs um eine horizontale vierte Drehachse schenkbar gelagert sein. Statt eines aktiven, motorischen Antriebs oder ergänzend zu einem aktiven, motorischen Antrieb kann die Körperteilauflage ein mechanisch nachgiebiges Element, wie beispielsweise eine Dreh- und/oder Elastomerfeder, aufweisen, welche die Körperteilauflage in eine Grundstellung elastisch vorspannt.
- Die Rehabilitationsvorrichtung kann zur Bildung einer mechanischen Kopplung der Kippbewegung der Armauflage an die Höhenstellung des Hubschlittens in einer ersten Ausführungsvariante einen Seilzug aufweisen, der einen automatisch ansteuerbaren Motor und eine von dem Motor angetriebene Spindel aufweist, die ausgebildet ist, zum Aufwickeln eines Seils des Seilzugs, wenn der Motor die Spindel antreibt, wobei ein freies Ende des Seils mit der Körperteilauflage verbunden ist, und die Rehabilitationsvorrichtung eine Rückstellfeder aufweist, welche ausgebildet ist, die Körperteilauflage in eine Grundstellung zu bewegen, wenn das Seil keine Zugkraft auf die Körperteilauflage ausübt. Alternativ oder ergänzend zu einem Seilzug kann auch wenigstens ein Riemen, eine Kette oder ein sonstiges Koppelgetriebe zur Kopplung der Kippbewegung der Armauflage an die Höhenstellung des Hubschlittens vorgesehen sein.
- Die Rehabilitationsvorrichtung kann in einer zweiten Ausführungsvariante einen Linearantrieb aufweisen, der ein linear bewegliches, automatisch ansteuerbares Stellglied aufweist, das mit der Körperteilauflage verbunden ist, wobei die Rehabilitationsvorrichtung auch eine Rückstellfeder aufweist, welche ausgebildet ist, die Körperteilauflage in eine Grundstellung zu bewegen, wenn das Stellglied keine Zugkraft auf die Körperteilauflage ausübt.
- Die Rehabilitationsvorrichtung kann in einer dritten Ausführungsvariante einen Drehantrieb aufweisen, der eine drehbare, automatisch ansteuerbare Welle aufweist, die mit der Körperteilauflage verbunden ist, wobei die Rehabilitationsvorrichtung auch eine Rückstellfeder aufweist, welche ausgebildet ist, die Körperteilauflage in eine Grundstellung zu bewegen, wenn die Welle kein Drehmoment auf die Körperteilauflage ausübt.
- Der zweite Antrieb kann generell einen zweiten Motor umfassen, der dritte Antrieb kann dabei einen dritten Motor umfassen, wobei der erste Motor, der zweite Motor und der dritte Motor durch eine gemeinsame Steuerungseinrichtung der Rehabilitationsvorrichtung in einer Nachgiebigkeitsregelung, insbesondere einer Impedanzregelung oder einer Admittanzregelung angesteuert sind.
- Ein kraft- und/oder momentengeregelter Betrieb der Antriebe bzw. der Motoren, d.h. eine Nachgiebigkeitsregelung kann beispielsweise mittels Impedanzregelung oder Admittanzregelung erfolgen. Eine Admittanzregelung basiert auf einer vorhandenen Positionsregelung der Stellungen der Rehabilitationsvorrichtung auf Gelenkebene der Rehabilitationsvorrichtung. Hierbei werden die von außen auf die Rehabilitationsvorrichtung einwirkenden verallgemeinerten Kräfte gemessen. Ausgehend von diesen Kräften wird eine dem gewünschten dynamischen Verhalten entsprechende Bewegung der Rehabilitationsvorrichtung bestimmt, die über eine inverse Kinematik und die unterlagerte Positionsregelung an die Antriebe bzw. die Motoren kommandiert wird. Eine Impedanzregelung basiert im Gegensatz zu einer Admittanzregelung auf einer vorhandenen Drehmomentenregelung auf Gelenkebene. Es werden die Abweichung der tatsächlichen Ist-Lage von einer definierten Soll-Lage gemessen und entsprechend des gewünschten dynamischen Verhaltens eine gewünschte verallgemeinerte Kraft, bzw. Kräfte und Momente, bestimmt. Diese Kraft kann über die bekannte Kinematik der Rehabilitationsvorrichtung auf entsprechende Gelenkdrehmomente abgebildet werden. Die Drehmomente können schließlich über die unterlagerte Drehmomentenregelung eingestellt werden.
- Bei der Rehabilitationsvorrichtung handelt es sich insbesondere um eine sogenannte serielle Kinematik, bei der die Glieder und die Gelenke der Rehabilitationsvorrichtung abwechselnd seriell hintereinander angeordnet sind.
- Der zweite Antrieb kann einen zweiten Motor umfassen, der dritte Antrieb kann dabei einen dritten Motor umfassen, wobei der zweite Motor und der dritte Motor durch eine gemeinsame Steuerungseinrichtung der Rehabilitationsvorrichtung in einer Nachgiebigkeitsregelung, insbesondere Impedanzregelung oder einer Admittanzregelung, angesteuert sind und der erste Motor durch die Steuerungseinrichtung positionsgesteuert angesteuert ist.
- Die Rehabilitationsvorrichtung kann eine Anschlagsvorrichtung aufweisen, die ausgebildet ist, sowohl einen maximalen Schwenkwinkel des Grundarms um die erste, vertikal Drehachse zu begrenzen, als auch einen maximalen Schwenkwinkel des Vorderarms um die zweite, vertikal Drehachse zu begrenzen und zwar sowohl bezüglich des Grundarms als auch bezüglich des Hubschlittens.
- Wie bereits beschrieben, kann es vorgesehen sein, dass der Vorderarm über mechanische oder steuerungstechnische Koppelungen mit dem Hubschlitten gekoppelt ist. Beispielsweise kann der Vorderarm mittels Parallelogrammlenkern und/oder Riemen mit dem Hubschlitten gekoppelt sein. Eine Bewegungsbegrenzung mittels einer Anschlagsvorrichtung kann somit vorzugsweise über die mechanische oder steuerungstechnische Koppelung realisiert werden. Damit können beispielsweise drei Begrenzungen in einem Teilsystem mit zwei Freiheitsgraden der Rehabilitationsvorrichtung realisiert werden.
- Der Vorderarm kann generell mittels eines zweiten Gelenks um die zweite Drehachse schwenkbar an dem Grundarm gelagert sein, wobei das zweite Gelenk ausgebildet ist, den Vorderarm in allen Schwenklagen des Vorderarms oberhalb des Grundarms zu lagern, sowie das Verbindungsstück mittels eines dritten Gelenks um die dritte Drehachse schwenkbar an dem Vorderarm gelagert ist, wobei das dritte Gelenk ausgebildet ist, das Verbindungsstück in allen Schwenklagen des Verbindungsstücks oberhalb des Vorderarms zu lagern, und die Körperteilauflage mittels eines vierten Gelenks um die vierte Drehachse kippbar an dem Verbindungsstück gelagert ist, wobei das vierte Gelenk ausgebildet ist, die Körperteilauflage in allen Schwenklagen der Körperteilauflage oberhalb des Vorderarms zu lagern.
- Ein distaler Endabschnitt des Grundarms und/oder ein proximaler Endabschnitt des Vorderarms, an dem die zweite Drehachse angeordnet ist, kann gekröpft ausgebildet sein, derart, dass in einen übereinander angeordneten relativen Position von Grundarm und Vorderarm übereinander, ein als Klemmschutz wirkender Spaltraum zwischen Grundarm und Vorderarm gebildet wird.
- Ein ergänzender zusätzlicher Klemmschutz kann dadurch erreicht bzw. verbessert werden, dass die in einer Überlagerungsstellung von Grundarm und Vorderarm aufeinander zuweisenden Oberflächen von Grundarm und Vorderarm jeweils mit einer elastischen Schicht belegt sind.
- Der Vorderarm ist ergänzend zweiteilig mit einem ersten, proximalen Vorderarmteil und einem zweiten, distalen Vorderarmteil ausgebildet, wobei der zweite, distale Vorderarmteil an dem ersten, proximalen Vorderarmteil lösbar und derart umsteckbar gelagert ist, dass der zweite, distale Vorderarmteil wahlweise in einer ersten Orientierung an dem ersten, proximalen Vorderarmteil starr zu befestigen ist oder in einer zweiten Orientierung an dem ersten, proximalen Vorderarmteil starr zu befestigen ist, die von der ersten Orientierung abweicht, insbesondere gegenüber der ersten Orientierung um 180 Grad gedreht ist.
- Ein Umstecken des zweiten, distalen Vorderarmteil an dem ersten, proximalen Vorderarmteil kann durch eine Schnapp- /Rastverbindung erfolgen, welche in einem verrasteten Zustand das zweite, distale Vorderarmteil formschlüssig und starr mit dem ersten, proximalen Vorderarmteil verbindet und in einem entriegelten Zustand der zweite, distale Vorderarmteil von dem ersten, proximalen Vorderarmteil manuell entfernt und in einer anderen Orientierung wieder aufgesteckt werden kann.
- In allen Ausführungsformen kann auch die Körperteilauflage von dem Zwischenstück abnehmbar an dem Zwischenstück gelagert sein. Dazu kann das die Körperteilauflage mit dem Zwischenstück verbindende Gelenk lösbar ausgebildet sein.
- In allen Ausführungsformen kann die Körperteilauflage wahlweise als eine Armauflage, als eine Handauflage oder als eine Beinauflage ausgebildet sein.
- Im Folgenden wird die Erfindung, gegebenenfalls auch mit anderen Worten ausgedrückt, nochmals zusammenfassend dargestellt.
- Das Ziel der Erfindung ist es, ein neuartiges Robotersystem für Rehabilitationsanwendungen vorzustellen, welches leistungsfähig, sensitiv und zugleich sicher aufgebaut ist. Dabei soll dieses Robotersystem signifikant kostengünstiger ausgeführt sein, als vergleichbare bekannte Lösungen, so dass ein Einsatz nicht nur für gewerbliche Anwender, sondern auch bis in den privaten Bereich hinein wirtschaftlich möglich ist.
- Die Grundidee dieser Erfindung ist eine neuartige zielführende Kombination einer Sonderkinematik mit spezieller Antriebsverteilung und Aufbau, Gewichtskraftunterstützung und individuell anpassbaren Bewegungsbereichen.
- In einer vorteilhaften Ausprägungsform ist der Reha-Arm in fünf Freiheitsgraden beweglich aufgebaut, wobei der Endeffektor die Verbindung zum Patientenarm insbesondere einem Unterarm oder einer Hand einer Person darstellt und in alle drei translatorischen und in zwei rotatorischen Freiheitsgraden beweglich ist. Die zwei rotatorischen Freiheitsgrade beschreiben dabei eine Drehung bspw. des Unterarms um eine raumfestorientierte vertikale Achse und eine mitbewegte horizontale Achse, die immer senkrecht zur Längsrichtung des Unterarmes steht. Eine freie oder geführte Drehung des Unterarmes um seine Längsachse wird in dieser Ausprägungsvariante durch eine Fixierung des Unterarms in einer, mit dem Roboter verbundenen Schalenauflage unterbunden. Eine fixierte Lage des Unterarms bzw. auch der Hand ist vorab frei wählbar und soll einer möglichst ergonomischen Haltung entsprechen, die für die entsprechende Therapie zweckmäßig ist.
- Die fünf Freiheitsgrade der hier speziell beschriebenen Ausprägungsvariante des Reha-Armes werden durch fünf seriell angeordnete Gelenke erreicht.
- Das erste Gelenk ist raumfest und beschreibt eine vertikale Translation. Es wird durch eine Bewegungsvorgabe der Steuerung aktuiert angesteuert.
- Das zweite Gelenk wird durch eine Drehachse gebildet, welche eine aktuiert gesteuerte rotatorische Bewegung um die Vertialachse beschreibt.
- Das dritte Gelenk wird ebenfalls durch eine Drehachse gebildet. Diese steht im Wesentlichen parallel zur Drehachse des zweiten Gelenks und ist zu diesem beabstandet angeordnet. Sie beschreibt auch eine aktuiert gesteuerte rotatorische Bewegung um eine Vertikalachse.
- Das vierte Gelenk wird ebenfalls durch eine Drehachse gebildet. Auch diese steht im Wesentlichen parallel zum zweiten Gelenk und drittem Gelenk und ist zu diesen beabstandet angeordnet. Sie beschreibt auch rotatorische Bewegung um die Vertikalachse, ist jedoch passiv, d.h. ohne Antrieb ausgeführt. Sie wird durch die Stellung des Patientenarmes zwangsgeführt bzw. vorgegeben.
- Das fünfte Gelenk wird ebenfalls durch eine Drehachse gebildet und ist eher eine Kippachse. Diese steht im Wesentlichen senkrecht zur Drehachse des vierten Gelenks und ist horizontal orientiert. Die Bewegung der Achse kann steuerungstechnisch oder mechanisch gekoppelt vorgegeben werden, und insbesondere passiv frei oder passiv federunterstützt ausgeführt sein.
- Der hier beschriebene Aufbau unterscheidet sich grundlegend von bekannten Ausführungen anderer Reha-Arme oder SCARA-Roboter, da hier ein serieller Gelenkaufbau offenbart wird, der sowohl aktive als auch wenigstens ein passives Gelenk beinhaltet und dementsprechend kinematisch bzw. antriebstechnisch unterbestimmt ist.
- Zudem ist neuartig, dass sich das wenigstens eine passive Gelenk innerhalb der kinematischen Kette befindet, also nicht am distalen oder proximalen Ende der kinematischen Kette.
- Der Reha-Roboter d.h. die Rehabilitationsvorrichtung kann unter anderem auch im Impedanzmodus geregelt werden. Dies betrifft hauptsächlich die Grundgelenke zum Bewegen des Hubschlittens, des Grundarmes und des Vorderarmes, welche die Position und die Kräfte auf den Patientenarm im Raum vorgeben. Das Kippgelenk ist in der Grundausführung einfacher ausgeführt und rein positionsgeregelt. Durch das Kippgelenk wird die Neigung der Armauflage bestimmt, die den Patienten unterstützen und führen soll, damit dieser keine unzulässigen Ausgleichs- oder Kompensationsbewegungen bspw. mit dem Unterarm ausführen kann. Dabei wird die Armauflage bei Handpositionen oberhalb der Schulter so nach unten und bei Handpositionen unterhalb der Schulter so nach oben geneigt, dass eine Ebene stets durch die Schulter des Patienten geht. Diese Ebene wird dabei von dem Kippgelenk und der Längsausprägung der Armauflage aufgespannt und findet ihren Ursprung im TCP, d.h. in der Patientenhand. Neben der Höhe der Hand ist auch die horizontale Entfernung der Hand zur Schulter für die Neigung entscheidend.
- Die Neigung kann dabei im Kippgelenk entweder mechanisch gekoppelt oder gesteuert angetrieben vorgegeben werden.
- Bei der mechanischen Kopplung kann die Stellung und damit die Bewegung des Hubschlittens in Höhenrichtung aufgegriffen, gewandelt und auf Kippgelenk übertragen werden. Dies kann beispielsweise über einen Zugmittelaufbau insbesondere ein beidseitig ortsfestes Seil in der Linearachse erfolgen, welches bei Bewegung des Hubschlittens eine auf dem Schlitten montierte Seilrolle antreibt. Diese schnelle Drehbewegung kann über ein einfaches Getriebe entsprechend der Übersetzung reduziert werden und abtriebsseitig eine weitere Rolle oder einen Hebel antreiben, welche/welcher beispielsweise ein weiteres Zugmittel insbesondere einen Bowdenzug betätigt. Dieser Bowdenzug wird über die Gelenke nach vorne geführt und überträgt die Bewegung mittels Hebel oder Seilrolle direkt auf das Kippgelenk. Hierbei kann die Rückstellung der Neigung entweder aktiv, durch einen doppelten Aufbau für beide Bewegungsrichtungen oder passiv erfolgen, indem die Gravitation oder eine Feder die Armauflage immer in eine Richtung zieht und damit das Antriebsseil des Bowdenzuges auf Spannung hält.
- Da sich die Schulter der Person je nach Patientengröße auf einer anderen Höhe befindet, gibt es eine Vorrichtung, welche die Anpassung der Neigungsnullage zulässt. Dies kann entweder über eine Verstellung im Bowdenzug oder über ein Re-Justieren einer der beiden Seilrollen am Getriebe erfolgen. Nachteilig ist bei dieser Ausprägungsform jedoch, dass durch die Neigung nur die Höhe der Hand, nicht jedoch die Entfernung zur Schulter vorgegeben wird.
- Als vorteilhafte Variante ist auch eine Antriebsintegration in das Kippgelenk möglich. Hierzu kann ein Antrieb das Kippgelenk entweder als Getriebemotor direkt oder mit Federunterstützung antreiben, als Schubkurbelkinematik inklusive einem Stellzylinder ausgeführt sein oder einseitig über einen Seilzug mit Rolle wirken. Letzteres kann realisiert werden, indem beispielsweise ein Antrieb mit antreibender Seilrolle im Vorderarm platziert ist und ein Seil durch die dritte Drehachse geführt ist, welches über einen Hebelarm an der Armauflage angreift. Dabei wird die Armauflage über eine Feder stets entgegengesetzt nach unten gedrückt. Das Seil zieht dabei die Auflage gegen die Gewichtskraft des Patientenarms so nach oben, dass eine korrekte Neigung eingestellt wird. Ein solcher einseitig wirkender Aufbau ist nicht nur kostengünstig, sondern hat auch Vorteile hinsichtlich eines sicheren Betriebs, da die Auflage nach oben hin durch den Patienten frei bewegt werden kann oder im Kollisionsfall von unten einfach wegklappen kann.
- Die Neigung der Auflage dient dabei rein einer ergonomischen Unterstützung des Unterarmes, um den Patienten zu entlasten und ihm durch Führung zu einer korrekten Ausführung der Bewegung zu verhelfen. Daher kann ergänzend zum beschriebenen Aufbau eine gezielte Nachgiebigkeit im Antriebsstrang des Kippgelenks oder nachgeschaltet integriert in der Auflage, vorteilhaft zu einem natürlichen Bewegungsverhalten beitragen.
- Der Hubschlitten und der Grundarm dienen der Hauptbewegung in der Ebene und werden beispielsweise über Schrittmotoren mit niedrig übersetzendem Riementrieb, beispielsweise von unter 1: 10, insbesondere von 1:5, angetrieben. Dies führt zu einem sehr direkten Reglungsverhalten, bei dem der Antrieb nahezu verlustfrei und direkt mit äußeren Momenten belastet wird.
- Ein zuvor ermitteltes statisches und dynamisches Modell des Motors bezüglich seines Drehmomentenverlaufs, das zumindest Motorströme und Ankerposition bzw. Polradwinkel miteinbezieht, kann zur Schätzung des motorseitig wirkenden Drehmoments in jedem Gelenk herangezogen werden. Auch Störeinflüsse wie Rastmomente, Temperatur, Einflüsse des Riemens und Reibung etc. können modelliert werden. Diese gemessenen Gelenkmomente können zur Berechnung der wirkenden Eingangskraft an der Armauflage in die Dynamikgleichungen des Roboters eingesetzt werden. Die Berechnung dieser externen Kräfte kann beispielsweise nach dem Newton-Euler-Verfahren erfolgen.
- Weitere kraftmessende Sensoren sind in diesem Ausführungsbeispiel für die ebene Bewegung nicht generell notwendig. Neben diesen Kräften kann auch die Vertikalkraft für Therapiezwecke und als Bewegungsinput genutzt bzw. analysiert und ausgewertet werden. Hierzu kann analog zu den Bewegungen des Hubschlittens und des Grundarms ebenfalls der Motorstrom und die Ankerposition herangezogen werden. Alternativ oder ergänzend kann zudem ein einfacher eindimensional messender Kraftsensor distal im Bereich der Armauflage integriert werden, um die Messgenauigkeiten in dieser Richtung durch kürzere Kraftwege zu verbessern. Dieser Sensor kann beispielsweise so im Gelenk zwischen Vorderarm und Verbindungsstück eingebaut werden, dass die gesamte axiale Lagerkraft, d.h. insbesondere Zug und Druck, über den Sensor geleitet wird. Kann durch den Sensor nur eine Druckkraft gemessen werden, ist die Messstelle entsprechend federbasiert vorzuspannen.
- Ein weiteres wichtiges Merkmal des Reha-Roboters d.h. der Rehabilitationsvorrichtung dieser Erfindung betrifft den Antriebsstrang für Gelenk zwischen Grundarm und Vorderarm. Hier kann der Antrieb insbesondere im Hubschlitten gelagert sein. Eine erste Riemenstufe kann vorgesehen sein, diese übersetzt die Antriebsbewegung, insbesondere unter 1:10 oder 1:5, auf eine Riemenscheibe, die koaxial zu ersten Drehachse zwischen Hubschlitten und Grundarm liegt. Ein weiterer Riemen mit 1:1 Übersetzung überträgt die Drehbewegung auf das Gelenk zwischen Grundarm und Vorderarm. Dies hat diverse Vorteile gegenüber einem direkten Antrieb und einer Abstützung des Antriebsmomentes über den Grundarm. Zum einen bildet der Riemen kinematisch gesehen eine geschlossene Teilkette, wodurch das Antriebsmoment auf den Schwenkantrieb zwischen Hubschlitten und Grundarm deutlich verringert und die Genauigkeit des Arms erhöht wird. Zu anderen werden schwere Komponenten wie Antriebe in proximale Richtung verschoben wodurch die bewegte Masse reduziert wird. Dies hat ebenfalls positiven Einfluss auf Antriebsleistung und Sicherheitsaspekte. Darüber hinaus kann mit einem solchen Aufbau ein zielführendes Konzept von gezielt gesetzten Bewegungsraumgrenzen umgesetzt werden. Dies ist möglich da mit dem beschriebenen Riemenaufbau folgende Bewegungsgrenzen als feste aber verstellbare Anschläge gesetzt werden können. Die Bewegungsgrenzen können den Grundarm relativ zum Hubschlitten eingrenzen, den Vorderarm relativ zum Grundarm eingrenzen und gleichzeitig sogar auch den Vorderarm relativ zum Hubschlitten eingrenzen.
- Da der Hubschlitten nur einen translatorischen Freiheitsgrad besitzt und der Grundarm und der Vorderarm durch Drehgelenke bewegt sind, kann auch gesagt werden, dass für den Grundarm die absolute Bewegung beschränkt werden kann und für den Vorderarm sowohl die relative als auch zusätzlich die absolute Bewegung beschränkt werden kann. Dadurch können nicht nur die Bewegungsbereiche des Tool-Center-Points (TCP) also der Patientenhand sehr gezielt eingeschränkt werden, sondern auch die der Roboterglieder. Dies hält den Roboter vom Patienten fern und verhindert ungewollte Kollisionen. Je nach Therapiekonfiguration links oder rechts, je nach den Therapiebewegungsbereich, der Patientengröße und/oder der Patientenposition zum Roboter d.h. zur Rehabilitationsvorrichtung können diese Achslimits einfach verstellt werden.
- Sollte es dennoch zu einem unerwünschten Zusammenstoß des Roboters mit dem Patienten, einer anderen Person oder einem Gegenstand kommen, greifen eine Reihe von sehr kostengünstigen Sicherheitsfunktionen und/oder Sicherheitseigenschaften.
- Die im Roboter verbaute Antriebsleistung ist sehr gering, sodass der Roboter dem Menschen kräftemäßig gar keinen Schaden zufügen kann. Möglich ist dies, da die Hauptantriebe auf Grund ihrer vertikal ausgerichteten Drehachsen keinen Gravitationseinfluss besitzen, sodass hier nur Prozesskräfte d.h. Therapiekräfte wirken, sowie nur im geringen Maße Trägheits- und Reibungskräfte. Der Hubantrieb muss allerdings deutlich kräftiger ausgelegt werden, da sowohl hier Prozess-, Reib- und Trägheitskräfte als auch die Gewichtskraft des Patientenarmes und des Roboters wirken. Letztere machen mit Abstand den größten Teil der Antriebslast aus, besitzen jedoch die Eigenschaft, dass sie nicht von der Roboterstellung abhängen und während der Therapie konstant bleiben. Ein Ausgleichsystem kann diese Gewichtskraft vollständig oder teilweise über einen Energiespeicher, insbesondere einen federbasierten Energiespeicher aufnehmen, sodass der Einsatz eines kleineren leistungsschwächeren Antriebs für die Hubsäule ermöglicht wird.
- Durch die Schichtung und den Versatz benachbarter Glieder werden Scherstellen vermieden, Körperteile in Größe einer Hand können ohne Klemmungen zwischen zwei Roboterglieder gehalten werden.
- Der Hubschlitten kann mit einer stabilen Gabellagerung ausgeführt sein. Die hierdurch entstehende kritische Klemmstelle zwischen dem Grundarm und dem Hubschlitten kann über eine Elastomerabdeckung abgesichert sein.
- Alle beweglichen Roboterglieder, insbesondere der Grundarm und der Vorderarm, können mit einer vollständig oder zum Teil, insbesondere seitlich und/oder auf der Unterseite bzw. Oberseite mit einem nachgiebigen stoßabsorbierendem Material verkleidet sein.
- Zudem kann der Roboterarm auf der Unterseite des Grundarmes und des Vorderarmes, sowie ggf. am Hubschlitten einen z.B. linienförmigen berührend oder berührungslosen Sensor insbesondere eine Schaltleiste aufweisen, die erkennt, dass beim Absenken des Gesamtarmes dieser beispielsweise gegen den Patienten oder einen Gegenstand, wie beispielsweise einen Tisch gefahren ist. Durch entsprechende Steuerungsvorgaben kann darauf entsprechend sicherheitstechnisch reagiert werden.
- Die spezielle zur Körperteilauflage (entspricht TCP) hin aufsteigende Schichtung der Glieder hat den Vorteil, dass sich keine Glieder direkt neben dem Kopf des Patienten befinden bzw. bewegen, was in psychologische Wirkung günstiger ist, und dass die Gesamthöhe der Hubsäule reduziert sein kann. So sind selbst bei hoher Handhaltung des Patienten, wie beispielsweise über Kopf, nur eine niedrigere obere Schlittenposition und damit eine niedrigere Hubsäule notwendig. Da der Gesamthub des Armes und damit des Schlitten gleich bleibt, verschiebt sich der Bewegungsbereich der Hubsäule um den Betrag der Schichtung in den unteren, konstruktiv unkritischen Bereich.
- Eine kleinere Hubsäule hat nicht nur Vorteile in Design, dem Transport und den Kosten, sondern auch in der Stabilität. Um die Stabilität sicherstellen zu können, besitzt die Hubsäule im unteren Bereich beispielsweise mehrere Standfüße, die in einer Ausführungsvariante über abnehmbare Gewichte weiter stabilisiert werden kann. Diese abnehmbaren Gewichte können insbesondere als mit Wasser oder Sand befüllte Hohlkörper ausgeführt werden, die nach Transport entsprechend aufzufüllen sind. Sie werden mit den Standfüßen oder der Säule verbunden und erhöhen als Gegengewichte die Stabilität des Aufbaus.
- Damit der gesamte Roboter passiv mobil verschoben werden kann, sind die Standfüße beispielsweise so mit Rollen ausgeführt, dass diese am Zielort entweder blockiert werden oder die Basis abgesenkt werden kann.
- Alternativ oder ergänzend kann auch die Sitzgelegenheit für den Patienten dazu genutzt werden, die Stabilität des Roboterstandfußes zu erhöhen, indem der Sitz, Stuhl oder Block auf einen Bereich der Standfüße gestellt oder beispielsweise durch eine Verrastung mit ihm mechanisch verbunden wird.
- Der hier vorgestellte Aufbau des Reha-Arms bietet maximale Flexibilität und Vielfältigkeit bei der Therapie. So kann beispielsweise der Patient sowohl direkt neben dem Arm sitzen, als auch seitlich mit Abstand zu diesem oder mit Abstand frontal vor ihm Platz nehmen. Auch alle anderen Patientenpositionen sind möglich. Ebenso kann dieser Aufbau ohne Umbau, ggf. mit Ausnahme der Einstellung der Achsanschläge, sowohl für die Therapie des rechten Armes als auch des linken Armes genutzt werden.
- Durch eine lösbare und drehbare Verbindung innerhalb des Vorderarms kann die Orientierung beispielsweise um 180° gedreht werden, so dass die Armauflage wahlweise nach unten zeigt oder nach oben zeigt. Hierdurch sind auch andere Übungen in einem anderen Bewegungsbereich möglich.
- Des Weiteren ist die Armauflage beispielsweise als Baukasten modifizierbar und/oder anpassbar und kann je nach Ausführungsform auch weitere Beweglichkeiten oder Armunterstützungen enthalten.
- Die Körperteilauflage kann in einer speziellen Ausführungsform zumindest zweiteilig ausgebildet sein mit wenigstens einer Armauflage und wenigstens einer Handauflage, wobei sowohl die Armauflage eine durch magnetische Haftkraft mit einer ersten Körperteil-Manschette magnetkraftschlüssig zusammenwirkende erste Kopplungseinrichtung aufweist, als auch die Handauflage eine durch magnetische Haftkraft mit einer zweiten Körperteil-Manschette magnetkraftschlüssig zusammenwirkende zweite Kopplungseinrichtung aufweist. Zur Erzielung einer festen Verbindung des Armes der Person mit der Körperteilauflage, d.h. zur Erzielung einer festen Verbindung der ersten Körperteil-Manschette mit der Armauflage und der zweiten Körperteil-Manschette mit der Handauflage kann die erste Körperteil-Manschette eine erste Gegenkopplungseinrichtung aufweisen und die zweite Körperteil-Manschette eine zweite Gegenkopplungseinrichtung aufweisen. Jeweils das Paar von erster Kopplungseinrichtung und erster Gegenkopplungseinrichtung bzw. das Paar von zweiter Kopplungseinrichtung und zweiter Gegenkopplungseinrichtung kann wenigstens eine Paarung eines Magneten mit einem ferromagnetischen Eisenstück oder eine Paarung von zwei gegenpolig zusammenwirkenden Magneten sein. Demgemäß können wahlweise erste Kopplungseinrichtung, die zweite Kopplungseinrichtung, die erste Gegenkopplungseinrichtung und/oder die zweite Gegenkopplungseinrichtung einen Magneten und/oder ein ferromagnetisches Eisenstück umfassen.
- Diese technische Lösung einer Verbindung von Körperteil-Manschetten mit der Armauflage besteht somit insbesondere aus einer zweifachen magnetischen Kopplung des Unterarmes bzw. der Hand mit der Armauflage bzw. Handauflage. Hierzu legt sich der Patient je nach Therapie im Vorfeld der Übung ein oder zwei Bandagen, d.h. die Manschetten an Handgelenk und/oder Unterarm an. Diese Manschetten sind individuell gestaltet und verbleiben auch über die Übung hinaus beim Patienten. Die beiden Bandagen oder Manschetten beinhalten jeweils mindestens ein magnetisches Element d.h. Gegenkopplungseinrichtungen, welche mit einem Koppelpartner/Gegenstück (Metall oder ebenfalls Magnet), d.h. den Kopplungseinrichtungen auf der Armauflage und/oder Handauflage durch einfaches Annähern mittels Magnetkraft verbunden werden können.
- Die Armauflage bzw. Handauflage kann so aufgebaut sein, dass sie einen Handgriff besitzt, welcher frei um eine zur Haupterstreckungsrichtung der Armauflage im Wesentlichen parallelen Achse drehbar ist. Dies ermöglicht ein individuelles Einstellen einer ergonomischen Handorientierung und Unterarmhaltung und erweitert die Freiheitsgrade des Reha-Arms auf sechs Freiheitsgrade. Der Handgriff kann neben der Magnetfläche auf der Handauflagefläche auch einen Sensor, wie beispielsweise eine einfache Fotodiode oder ein Taster zur Erkennung der aufliegenden Patientenhand, aufweisen. Wird die Hand vom Griff gelöst, hält die Rehabilitationsvorrichtung an. Beim Wiederauflegen wird die Bewegung nach einer Quittierung, einem Signal oder einer definierten Zeitspanne wiederaufgenommen.
- Des Weiteren kann die Armauflage eine Unterarmstütze aufweisen, die ebenso die Möglichkeit einer magnetischen Kopplung bietet. Sie kann dabei zwecks seitlicher Führung des Unterarms beispielsweise als eine halbrunde, offene Schale gestaltet sein. Hier ist eine einzelne Magnetpaarung ausreichend und schränkt die Beweglichkeit des Handgelenks nicht ein. Mit anderen Worten, egal welche Griffstellung (z.B. 0°,45°,90°) vom Patienten eingenommen wird, bleibt die Ausrichtung des Koppelpunktes Unterarm zu Unterarmstütze konstant, sodass alle Griffstellungen mit nur einem Unterarmkoppelpunkt erreicht werden können.
- Die Magnetverbindungen können beispielsweise als plane Flächen der Koppelpartner (erste/zweite Kopplungseinrichtung, erste/zweite Gegenkopplungseinrichtung) ausgeführt sein und/oder gewisse Formelemente besitzen, die ineinandergreifen, um seitliche Kräfte besser aufnehmen zu können.
- Als ergänzende Ausführungsform können die Bandagen auch Sensoren zur Messung und Überwachung der Vitalfunktionen beinhalten. Bei Kopplung mit der Armauflage werden diese über eine elektrische Schnittstelle mit Energie versorgt und senden Daten an eine Steuerungsvorrichtung der Rehabilitationsvorrichtung, so dass gezielte auf die körperliche Verfassung des Patienten reagiert werden kann. Zudem können diese Messwerte der Vitalfunktion auch mit den Bewegungsdaten abgespeichert und einem Therapeuten zu Auswertung übermittelt werden.
- Die Sensoren können auch mit Batterien ausgestattet sein, die über die Schnittstelle zur Armauflage geladen werden und auch noch nach der aktiven Therapie weitere Messwerte aufzeichnen.
- Des Weiteren können die Bandagen d.h. die Manschetten beispielsweise auch ein NFC-Element, wie ein RFID-Tag beinhalten, auf dem alle wichtigen Patientendaten hinterlegt sind. Wird die Rehabilitationsvorrichtung von vielen Patienten benutzt, wie es beispielsweise in einem Reha-Zentrum der Fall ist, ist es ausreichend, wenn sich der Patient mit der Armauflage koppelt. Dabei werden alle relevanten Daten der individuellen Therapie auf die Steuerung übertragen, sodass das Training sofort beginnen kann.
- Möchte sich der Patient von der Rehabilitationsvorrichtung entfernen oder diese loslassen muss er lediglich seinen Arm aus der Armauflage ziehen. Dies kann beispielsweise durch den Arm selber oder mit Zuhilfenahme des anderen Armes erfolgen. Dabei kann eine Bewegung gegen die Magnetkraft z.B. entlang der Normalenrichtung oder ein Verdrehen bzw. Abgleiten der Magnete ein einfaches Lösen bewirken.
- Die gesamte Armauflage kann durch einfaches axiales Herausziehen getrennt und für andere Therapieanwendungen gewechselt werden.
- Alternativ zu Magnetverbindungen können als Koppelelemente auch mechanische Verrastungen, Klettverschlusselemente oder auf Unterdruck basierende Verbindungen, wie Saugnäpfe verwendet werden. Erfindungsgemäß wird in einer speziellen Ausführungsform allerdings die magnetische Kopplung bevorzugt.
- Zusammenfassend kann festgehalten werden, dass das hier vorgestellte neuartige Robotersystem für Reha-Anwendungen trotz ausreichender Leistungsfähigkeit, insbesondere hinsichtlich einer Therapiekraft, sehr sicher und trotzdem extrem kostengünstig im Vergleich bekannten Lösungen aufgebaut werden kann und sich für eine Vielzahl an Reha-, Trainings- und Therapiemaßnahmen eignet.
- Konkrete Ausführungsbeispiele der Erfindung sind in der nachfolgenden Beschreibung unter Bezugnahme auf die beigefügten Figuren näher erläutert. Konkrete Merkmale dieser exemplarischen Ausführungsbeispiele können unabhängig davon, in welchem konkreten Zusammenhang sie erwähnt sind, gegebenenfalls auch einzeln oder in weiteren Kombinationen betrachtet, allgemeine Merkmale der Erfindung darstellen.
- Es zeigen:
- Fig. 1
- eine perspektivische Darstellung einer beispielhaften erfindungsgemäßen Rehabilitationsvorrichtung im Einsatz an einer Person,
- Fig. 2
- eine perspektivische Darstellung einer beispielhaften erfindungsgemäßen Rehabilitationsvorrichtung in Alleinstellung,
- Fig. 3
- eine Seitenansicht der Rehabilitationsvorrichtung gemäß
Fig.2 , - Fig. 4
- die Rehabilitationsvorrichtung gemäß
Fig.2 mit einer schematischen Darstellung dreier unterschiedlicher Kippstellungen der Körperteilauflage, - Fig. 5
- eine schematische Darstellung eines beispielhaften Antriebs für die Kippstellungen der Körperteilauflage mit einem Seilzug und Spindel,
- Fig. 6
- eine erste Ausführungsform eines Antriebs, mit einem Seilzug zur Ausführung der Kippbewegung der Körperteilauflage,
- Fig. 7
- eine zweite Ausführungsform eines Antriebs, mit einem Linearantrieb zur Ausführung der Kippbewegung der Körperteilauflage,
- Fig. 8
- eine dritte Ausführungsform eines Antriebs, mit einem Drehantrieb zur Ausführung der Kippbewegung der Körperteilauflage,
- Fig. 9
- eine perspektivische Darstellung der Rehabilitationsvorrichtung gemäß
Fig.1 in einer Konfiguration linksseitig einer Person, - Fig. 10
- eine perspektivische Darstellung der Rehabilitationsvorrichtung gemäß
Fig.1 in einer Konfiguration rechtsseitig einer Person, - Fig. 11
- eine perspektivische Teilansicht des Vorderarms der Rehabilitationsvorrichtung in einer zweiteiligen Ausführung mit einem ersten, proximalen Vorderarmteil und einem zweiten, distalen Vorderarmteil, in einer nach oben weisenden Konfiguration der Körperteilauflage,
- Fig. 12
- eine perspektivische Teilansicht des Vorderarms der Rehabilitationsvorrichtung in einer zweiteiligen Ausführung mit einem ersten, proximalen Vorderarmteil und einem zweiten, distalen Vorderarmteil, in einer nach unten weisenden Konfiguration der Körperteilauflage, und
- Fig. 13 bis Fig. 19
- verschiedene zusätzliche Darstellungen einer weiterentwickelten Ausführungsform der erfindungsgemäßen Rehabilitationsvorrichtung.
- Die
Fig. 1 zeigt eine beispielshafte Grundausführungsform einer erfindungsgemäßen Rehabilitationsvorrichtung 1. Die Rehabilitationsvorrichtung 1 weist auf ein Stativ 2, eine an dem Stativ 2 befestigte Hubsäule 3, einen an der Hubsäule 3 höhenverstellbar gelagerten Hubschlitten 4, der mittels eines ersten Antriebs der Rehabilitationsvorrichtung 1 automatisch höhenbeweglich ist, einen an dem Hubschlitten 4 um eine erste, vertikale Drehachse D1 schwenkbar gelagerten Grundarm 5, der mittels eines zweiten Antriebs der Rehabilitationsvorrichtung 1 automatisch angetrieben um die erste, vertikale Drehachse D1 zu schwenken ist, einen an dem Grundarm 5 um eine zweite, vertikale Drehachse D2 schwenkbar gelagerten Vorderarm 6, der mittels eines dritten Antriebs der Rehabilitationsvorrichtung 1 automatisch angetrieben um die zweite, vertikale Drehachse D2 zu schwenken ist, ein an dem Vorderarm 6 um eine dritte, vertikale Drehachse D3 unangetrieben frei drehbar gelagertes Verbindungsstück 7, und eine an dem Verbindungsstück 7 um eine vierte, horizontale Drehachse D4 kippbar gelagerte Körperteilauflage 8. - Das Stativ 2 weist Standbeine 9 auf, im Falle des vorliegenden Ausführungsbeispiels vier Standbeine 9 auf. An den Standbeinen 9 können wie dargestellt Gewichte 10 angebracht sein, um die Stabilität, d.h. die Standfestigkeit der Rehabilitationsvorrichtung 1 zu erhöhen. Die Standbeine 9 können optional, wie in
Fig. 2 dargestellt, mit Standfüßen 11 versehen sein. Statt Standfüße 11 können auch Laufrollen vorgesehen sein, die ein leichtes manuelles Verfahren der Rehabilitationsvorrichtung 1 ermöglichen. Die Laufrollen können gebremst ausgebildet sein. - IM Falle des vorliegenden Ausführungsbeispiels ist die Körperteilauflage 8 als eine Unterarmauflage ausgebildet, an der ein Unterarm einer Person 12 festgeschnallt ist.
- Die
Fig. 2 zeigt in einer etwas abgewandelten Ausführungsform der Rehabilitationsvorrichtung 1 nochmals die Freiheitsgrade der Rehabilitationsvorrichtung 1. Auch hier umfasst die Rehabilitationsvorrichtung 1 ein Stativ 2, eine an dem Stativ 2 befestigte Hubsäule 3, einen an der Hubsäule 3 höhenverstellbar gelagerten Hubschlitten 4, der mittels eines ersten Antriebs der Rehabilitationsvorrichtung 1 automatisch höhenbeweglich ist, einen an dem Hubschlitten 4 um eine erste, vertikale Drehachse D1 schwenkbar gelagerten Grundarm 5, der mittels eines zweiten Antriebs der Rehabilitationsvorrichtung 1 automatisch angetrieben um die erste, vertikale Drehachse D1 zu schwenken ist, einen an dem Grundarm 5 um eine zweite, vertikale Drehachse D2 schwenkbar gelagerten Vorderarm 6, der mittels eines dritten Antriebs der Rehabilitationsvorrichtung 1 automatisch angetrieben um die zweite, vertikale Drehachse D2 zu schwenken ist, ein an dem Vorderarm 6 um eine dritte, vertikale Drehachse D3 unangetrieben frei drehbar gelagertes Verbindungsstück 7, und eine an dem Verbindungsstück 7 um eine vierte, horizontale Drehachse D4 kippbar gelagerte Körperteilauflage 8
Wie insbesondere ausFig. 3 ersichtlich ist, ist der Vorderarm 6 mittels eines zweiten Gelenks G2 um die zweite Drehachse D2 schwenkbar an dem Grundarm 5 gelagert, wobei das zweite Gelenk G2 ausgebildet ist, den Vorderarm 6 in allen Schwenklagen des Vorderarms 6 oberhalb des Grundarms 5 zu lagern, wobei das Verbindungsstück 7 mittels eines dritten Gelenks G3 um die dritte Drehachse D3 schwenkbar an dem Vorderarm 6 gelagert ist, wobei das dritte Gelenk G3 ausgebildet ist, das Verbindungsstück 7 in allen Schwenklagen des Verbindungsstücks 7 oberhalb des Vorderarms 6 zu lagern, dabei ist die Körperteilauflage 8 mittels eines vierten Gelenks G4 um die vierte Drehachse D4 kippbar (Pfeil P1) an dem Verbindungsstück 7 gelagert, wobei das vierte Gelenk G4 ausgebildet ist, die Körperteilauflage 8 in allen Schwenklagen der Körperteilauflage 8 oberhalb des Vorderarms 6 zu lagern. Die drei möglichen grundlegenden Schwenklagen der Körperteilauflage 8 sind inFig. 4 aufgezeigt. In einer ersten grundlegenden Schwenklage der Körperteilauflage 8 kann die Körperteilauflage 8 wie inFig. 4 oben dargestellt ist, mit ihrer Auflagefläche zum Vorderarms 6 hin abfallend orientiert sein. In einer zweiten grundlegenden Schwenklage der Körperteilauflage 8 kann die Körperteilauflage 8 wie inFig. 4 Mitte dargestellt ist, mit ihrer Auflagefläche horizontal ausgerichtet sein. In einer dritten grundlegenden Schwenklage der Körperteilauflage 8 kann die Körperteilauflage 8 wie inFig. 4 unten dargestellt ist, mit ihrer Auflagefläche vom Vorderarms 6 wegweisend, d.h. ansteigend orientiert sein. - Die
Fig.3 zeigt außerdem, wie ein distaler Endabschnitt E1 des Grundarms 5 und/oder ein proximaler Endabschnitt E2 des Vorderarms 6, an welchem Übergang die Endabschnitte E1 und E2 die zweite Drehachse D2 angeordnet ist, gekröpft ausgebildet sind, derart, dass in einen übereinander angeordneten relativen Position von Grundarm 5 und Vorderarm 6, wie inFig. 3 dargestellt, ein als Klemmschutz wirkender Spaltraum S zwischen Grundarm 5 und dem - gestrichelt dargestellten, eingeklappten - Vorderarm 6 gebildet wird. - In
Fig. 5 bis Fig. 8 ist jeweils dargestellt, wie die Körperteilauflage 8 mittels eines die Körperteilauflage 8 mit dem Verbindungsstück 7 verbindenden Federkörpers 13 um die vierte, horizontale Drehachse D4 zu kippen ist, wobei der Federkörper 13 die Körperteilauflage 8 in eine vorgegebene Grundstellung, wie dargestellt, federelastisch rückstellbar an dem Verbindungsstück 7 lagert. - Die Körperteilauflage 8 kann dabei mittels eines vierten Antriebs der Rehabilitationsvorrichtung 1 automatisch angetrieben um die vierte, horizontale Drehachse D4 zu kippen sein.
- Die automatisch angetriebene Bewegung der Körperteilauflage 8 relativ zum Verbindungsstück 7 kann an die automatisch angetriebene Höhenbewegung des Hubschlittens 4 relativ zur Hubsäule 3 gekoppelt sein.
- Wie die
Fig. 5 schematisch aufzeigt, kann der erste Antrieb einen im Stativ 2 oder in der Hubsäule 3 angeordneten ersten Motor M1 umfassen, der ausgebildet ist, den Hubschlitten 4 motorisch angetrieben an der Hubsäule 3 zu heben und/oder zu senken, wobei die Rehabilitationsvorrichtung 1 eine mechanische Kopplungseinrichtung 14 aufweisen kann, die einen Teil des vierten Antriebs bildet und die ausgebildet ist, eine Antriebsbewegung des ersten Motors M1 auf die Körperteilauflage 8 zu übertragen, derart, dass bei einer Hubbewegung (Pfeil P2) des Hubschlittens 4, angetrieben durch den ersten Motor M1, die Körperteilauflage 8 eine synchrone Kippbewegung (Pfeil P3) ausführt. - In einer gegenüber der Ausführungsform gemäß
Fig. 5 abgewandelten Ausführungsform kann gemäßFig. 6 bis Fig. 8 jeweils, der erste Antrieb einen im Stativ 2 oder in der Hubsäule 3 angeordneten ersten Motor umfassen, der ausgebildet ist, den Hubschlitten 4 motorisch angetrieben an der Hubsäule 3 zu heben und/oder zu senken, und ein vierter Antrieb kann dabei einen vierten Motor M4 aufweisen, der ausgebildet ist, seine Antriebsbewegung auf die Körperteilauflage 8 zur Ausführung einer Kippbewegung der Körperteilauflage 8 zu übertragen, wobei der vierte Motor M4 steuerungstechnisch mit dem ersten Motor gekoppelt ist, derart, dass bei einer Antriebsbewegung des ersten Motors, um den Hubschlitten 4 relativ zur Hubsäule 3 zu bewegen, eine gleichzeitig angesteuerte Bewegung des vierten Motors M4 eine zur Hubbewegung synchrone Kippbewegung der Körperteilauflage 8 bewirkt. - In der Ausführungsvariante gemäß
Fig. 6 weist die Rehabilitationsvorrichtung 1 einen Seilzug 15 auf, der einen automatisch ansteuerbaren Motor M4 und eine von dem Motor M4 angetriebene Spindel 16 aufweist, die ausgebildet ist, zum Aufwickeln eines Seils 17 des Seilzugs 15, wenn der Motor M4 die Spindel 16 antreibt, wobei ein freies Ende des Seils 17 mit der Körperteilauflage 8 verbunden ist, und aufweisend eine Rückstellfeder 13, welche ausgebildet ist, die Körperteilauflage 8 in eine Grundstellung zu bewegen, wenn das Seil 17 keine Zugkraft auf die Körperteilauflage 8ausübt. - In der Ausführungsvariante gemäß
Fig. 7 weist die Rehabilitationsvorrichtung 1 einen Linearantrieb 18 auf, der ein linear bewegliches, automatisch ansteuerbares Stellglied 19 aufweist, das mit der Körperteilauflage 8 verbunden ist, und aufweisend eine Rückstellfeder 13, welche ausgebildet ist, die Körperteilauflage 8 in eine Grundstellung zu bewegen, wenn das Stellglied 19 keine Zugkraft auf die Körperteilauflage 8 ausübt. - In der Ausführungsvariante gemäß
Fig. 8 weist die Rehabilitationsvorrichtung 1 einen Drehantrieb 20 auf, der eine drehbare, automatisch ansteuerbare Welle aufweist, die mit der Körperteilauflage 8 verbunden ist, und aufweisend eine Rückstellfeder 13, welche ausgebildet ist, die Körperteilauflage8 in eine Grundstellung zu bewegen, wenn die Welle kein Drehmoment auf die Körperteilauflage 8 ausübt. - Die
Fig. 9 zeigt die Rehabilitationsvorrichtung 1 gemäßFig.1 in einer Konfiguration linksseitig der Person 12. - Die
Fig. 10 zeigt die Rehabilitationsvorrichtung 1 gemäßFig.1 in einer Konfiguration rechtsseitig der Person 12. - Die
Fig. 11 und Fig. 12 zeigen, wie der Vorderarm 6 zweiteilig mit einem ersten, proximalen Vorderarmteil 6.1 und einem zweiten, distalen Vorderarmteil 6.2 ausgebildet ist, wobei der zweite, distale Vorderarmteil 6.2 an dem ersten, proximalen Vorderarmteil 6.1 lösbar und derart umsteckbar gelagert ist, dass der zweite, distale Vorderarmteil 6.2 wahlweise in einer ersten Orientierung, wie inFig. 11 dargestellt, an dem ersten, proximalen Vorderarmteil 6.1 starr zu befestigen ist oder in einer zweiten Orientierung, wie inFig. 12 dargestellt, an dem ersten, proximalen Vorderarmteil 6.1 starr zu befestigen ist, die von der ersten Orientierung abweicht, insbesondere gegenüber der ersten Orientierung um 180 Grad gedreht ist. - Die
Fig. 16a und Fig. 16b veranschaulichen, wie die Körperteilauflage 8 zumindest zweiteilig ausgebildet ist mit wenigstens einer Armauflage 8.1 und wenigstens einer Handauflage 8.2, wobei sowohl die Armauflage 8.1 eine durch magnetische Haftkraft mit einer ersten Körperteil-Manschette 21 magnetkraftschlüssig zusammenwirkende erste Kopplungseinrichtung 23.1 aufweist, als auch die Handauflage 8.2 eine durch magnetische Haftkraft mit einer zweiten Körperteil-Manschette 22 magnetkraftschlüssig zusammenwirkende zweite Kopplungseinrichtung 23.2 aufweist. Zur Erzielung einer festen Verbindung des Armes der Person 12 mit der Körperteilauflage 8, d.h. zur Erzielung einer festen Verbindung der ersten Körperteil-Manschette 21 mit der Armauflage 8.1 und der zweiten Körperteil-Manschette 22 mit der Handauflage 8.2 kann, wie dargestellt, die erste Körperteil-Manschette 21 eine erste Gegenkopplungseinrichtung 24.1 aufweisen und die zweite Körperteil-Manschette 22 eine zweite Gegenkopplungseinrichtung 24.2 aufweisen. Jeweils das Paar von erster Kopplungseinrichtung 23.1 und erster Gegenkopplungseinrichtung 24.1 bzw. das Paar von zweiter Kopplungseinrichtung 23.2 und zweiter Gegenkopplungseinrichtung 24.2 kann wenigstens eine Paarung eines Magneten mit einem ferromagnetischen Eisenstück oder eine Paarung von zwei gegenpolig zusammenwirkenden Magneten sein. Demgemäß kann wahlweise erste Kopplungseinrichtung 23.1, die zweite Kopplungseinrichtung 23.2, die erste Gegenkopplungseinrichtung 24.1 und/oder die zweite Gegenkopplungseinrichtung 24.2 einen Magneten und/oder ein ferromagnetisches Eisenstück umfassen.
Claims (14)
- Rehabilitationsvorrichtung, aufweisend ein Stativ (2), eine an dem Stativ (2) befestigte Hubsäule (3), einen an der Hubsäule (3) höhenverstellbar gelagerten Hubschlitten (4), der mittels eines ersten Antriebs der Rehabilitationsvorrichtung (1) automatisch höhenbeweglich ist, einen an dem Hubschlitten (4) um eine erste, vertikale Drehachse (D1) schwenkbar gelagerten Grundarm (5), der mittels eines zweiten Antriebs der Rehabilitationsvorrichtung (1) automatisch angetrieben um die erste, vertikale Drehachse (D1) zu schwenken ist, einen an dem Grundarm (5) um eine zweite, vertikale Drehachse (D2) schwenkbar gelagerten Vorderarm (6), der mittels eines dritten Antriebs der Rehabilitationsvorrichtung (1) automatisch angetrieben um die zweite, vertikale Drehachse (D2) zu schwenken ist, ein an dem Vorderarm (6) um eine dritte, vertikale Drehachse (D3) frei drehbar gelagertes Verbindungsstück (7), und eine an dem Verbindungsstück (7) um eine vierte, horizontale Drehachse (D4) kippbar gelagerte Körperteilauflage (8) dadurch gekennzeichnet, dass der Vorderarm (6) zweiteilig mit einem ersten, proximalen Vorderarmteil (6.1) und einem zweiten, distalen Vorderarmteil (6.2) ausgebildet ist, wobei der zweite, distale Vorderarmteil (6.2) an dem ersten, proximalen Vorderarmteil (6.1) lösbar und derart umsteckbar gelagert ist, dass der zweite, distale Vorderarmteil (6.2) wahlweise in einer ersten Orientierung an dem ersten, proximalen Vorderarmteil (6.1) starr zu befestigen ist oder in einer zweiten Orientierung an dem ersten, proximalen Vorderarmteil (6.1) starr zu befestigen ist, die von der ersten Orientierung abweicht, insbesondere gegenüber der ersten Orientierung um 180 Grad gedreht ist..
- Rehabilitationsvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die Körperteilauflage (8) mittels eines die Körperteilauflage (8) mit dem Verbindungsstück (7) verbindenden Federkörpers (13) um die vierte, horizontale Drehachse (D4) zu kippen ist, wobei der Federkörper (13) die Körperteilauflage (8) in eine vorgegebene Grundstellung federelastisch rückstellbar an dem Verbindungsstück (7) lagert.
- Rehabilitationsvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass die Körperteilauflage (8) mittels eines vierten Antriebs der Rehabilitationsvorrichtung (1) automatisch angetrieben um die vierte, horizontale Drehachse (D4) zu kippen ist, insbesondere mittels eines dem vierten Antrieb zugeordneten mechanisch nachgiebigen Elements zu kippen ist, das die Körperteilauflage (8) in eine Grundstellung elastisch vorspannt.
- Rehabilitationsvorrichtung nach Anspruch 3, dadurch gekennzeichnet, dass die automatisch angetriebene Bewegung der Körperteilauflage (8) relativ zum Verbindungsstück (7) an die automatisch angetriebene Höhenbewegung des Hubschlittens (4) relativ zur Hubsäule (3) gekoppelt ist, insbesondere an die automatisch angetriebene Höhenbewegung des Hubschlittens (4) und auch an die Schwenkbewegungen des Grundarms und des Vorderarms gekoppelt ist.
- Rehabilitationsvorrichtung nach Anspruch 4, dadurch gekennzeichnet, dass der erste Antrieb einen im Stativ (2) oder in der Hubsäule (3) angeordneten ersten Motor (M1) umfasst, der ausgebildet ist, den Hubschlitten (4) motorisch angetrieben an der Hubsäule (3) zu heben und/oder zu senken, und die Rehabilitationsvorrichtung (1) eine mechanische Kopplungseinrichtung (14) aufweist, die einen Teil des vierten Antriebs bildet und die ausgebildet ist, eine Antriebsbewegung des ersten Motors (M1) auf die Körperteilauflage (8) zu übertragen, derart, dass bei einer Hubbewegung des Hubschlittens (4), angetrieben durch den ersten Motor (M1), die Körperteilauflage (8) eine zur Hubbewegung synchrone Kippbewegung ausführt.
- Rehabilitationsvorrichtung nach Anspruch 4, dadurch gekennzeichnet, dass der erste Antrieb einen im Stativ (2) oder in der Hubsäule (3) angeordneten ersten Motor (M1) umfasst, der ausgebildet ist, den Hubschlitten (4) motorisch angetrieben an der Hubsäule (3) zu heben und/oder zu senken, und der vierte Antrieb einen vierten Motor (M4) aufweist, der ausgebildet ist, seine Antriebsbewegung auf die Körperteilauflage (8) zur Ausführung einer Kippbewegung der Körperteilauflage (8) zu übertragen, wobei der vierte Motor (M4) mechanisch und/oder steuerungstechnisch mit dem ersten Motor (M1) gekoppelt ist, derart, dass bei einer Antriebsbewegung des ersten Motors (M1), um den Hubschlitten (4) relativ zur Hubsäule (3) zu bewegen, eine gleichzeitig angesteuerte Bewegung des vierten Motors (M4) eine zur Hubbewegung synchrone Kippbewegung der Körperteilauflage (8) bewirkt.
- Rehabilitationsvorrichtung nach einem der Ansprüche 3 bis 6, aufweisend einen Seilzug (15), der einen automatisch ansteuerbaren Motor und eine von dem Motor angetriebene Spindel (16) aufweist, die ausgebildet ist, zum Aufwickeln eines Seils (17) des Seilzugs (15), wenn der Motor die Spindel (16) antreibt, wobei ein freies Ende des Seils (17) mit der Körperteilauflage (8) verbunden ist, und aufweisend eine Rückstellfeder (13), welche ausgebildet ist, die Körperteilauflage (8) in eine Grundstellung zu bewegen, wenn das Seil (17) keine Zugkraft auf die Körperteilauflage (8) ausübt.
- Rehabilitationsvorrichtung nach einem der Ansprüche 3 bis 6, aufweisend einen Linearantrieb (18), der ein linear bewegliches, automatisch ansteuerbares Stellglied (19) aufweist, das mit der Körperteilauflage (8) verbunden ist, und aufweisend eine Rückstellfeder (13), welche ausgebildet ist, die Körperteilauflage (8) in eine Grundstellung zu bewegen, wenn das Stellglied (19) keine Zugkraft auf die Körperteilauflage (8) ausübt.
- Rehabilitationsvorrichtung nach einem der Ansprüche 3 bis 6, aufweisend einen Drehantrieb (20), der eine drehbare, automatisch ansteuerbare Welle aufweist, die mit der Körperteilauflage (8) verbunden ist, und aufweisend eine Rückstellfeder (13), welche ausgebildet ist, die Körperteilauflage (8) in eine Grundstellung zu bewegen, wenn die Welle kein Drehmoment auf die Körperteilauflage (8) ausübt.
- Rehabilitationsvorrichtung nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, dass der zweite Antrieb einen zweiten Motor umfasst, der dritte Antrieb einen dritten Motor umfasst und der zweite Motor und der dritte Motor durch eine gemeinsame Steuerungseinrichtung der Rehabilitationsvorrichtung (1) in einer Nachgiebigkeitsregelung, insbesondere einer Impedanzregelung oder einer Admittanzregelung angesteuert sind und der erste Motor durch die gemeinsame Steuerungseinrichtung der Rehabilitationsvorrichtung (1) positionsgesteuert oder in einer Nachgiebigkeitsregelung, insbesondere einer Impedanzregelung oder einer Admittanzregelung angesteuert ist.
- Rehabilitationsvorrichtung nach einem der Ansprüche 1 bis 10, aufweisend eine Anschlagsvorrichtung, die ausgebildet ist, sowohl einen maximalen Schwenkwinkel des Grundarms (5) um die erste, vertikal Drehachse (D1) zu begrenzen, als auch einen maximalen Schwenkwinkel des Vorderarms (6) um die zweite, vertikal Drehachse (D2) zu begrenzen und zwar sowohl bezüglich des Grundarms (5) als auch bezüglich des Hubschlittens (4).
- Rehabilitationsvorrichtung nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, dass der Vorderarm (6) mittels eines zweiten Gelenks (G2) um die zweite Drehachse (D2) schwenkbar an dem Grundarm (5) gelagert ist, wobei das zweite Gelenk (G2) ausgebildet ist, den Vorderarm (6) in allen Schwenklagen des Vorderarms (6) oberhalb des Grundarms (5) zu lagern, sowie das Verbindungsstück (7) mittels eines dritten Gelenks (G3) um die dritte Drehachse (D3) schwenkbar an dem Vorderarm (6) gelagert ist, wobei das dritte Gelenk (G3) ausgebildet ist, das Verbindungsstück (7) in allen Schwenklagen des Verbindungsstücks (7) oberhalb des Vorderarms (6) zu lagern, und die Körperteilauflage (8) mittels eines vierten Gelenks (G4) um die vierte Drehachse (D4) kippbar an dem Verbindungsstück (7) gelagert ist, wobei das vierte Gelenk (G4) ausgebildet ist, die Körperteilauflage (8) in allen Schwenklagen der Körperteilauflage (8) oberhalb des Vorderarms (6) zu lagern.
- Rehabilitationsvorrichtung nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet, dass ein distaler Endabschnitt (E1) des Grundarms (5) und/oder ein proximaler Endabschnitt (E2) des Vorderarms (6), an dem die zweite Drehachse (D2) angeordnet ist, gekröpft ausgebildet ist, derart, dass in einen übereinander angeordneten relativen Position von Grundarm (5) und Vorderarm (6) übereinander, ein als Klemmschutz wirkender Spaltraum (S) zwischen Grundarm (5) und Vorderarm (6) gebildet wird.
- Rehabilitationsvorrichtung nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, dass die Körperteilauflage (8) zumindest zweiteilig ausgebildet ist mit wenigstens einer Armauflage (8.1) und wenigstens einer Handauflage (8.2), wobei sowohl die Armauflage (8.1) eine durch magnetische Haftkraft mit einer ersten Körperteil-Manschette (21) magnetkraftschlüssig zusammenwirkende erste Kopplungseinrichtung (23.1) aufweist, als auch die Handauflage (8.2) eine durch magnetische Haftkraft mit einer zweiten Körperteil-Manschette (22) magnetkraftschlüssig zusammenwirkende zweite Kopplungseinrichtung (23.2) aufweist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018219446.7A DE102018219446A1 (de) | 2018-11-14 | 2018-11-14 | Rehabilitationsvorrichtung |
| PCT/EP2019/078486 WO2020099066A1 (de) | 2018-11-14 | 2019-10-21 | Rehabilitationsvorrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3880147A1 EP3880147A1 (de) | 2021-09-22 |
| EP3880147B1 true EP3880147B1 (de) | 2025-03-19 |
Family
ID=68344796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19794455.6A Active EP3880147B1 (de) | 2018-11-14 | 2019-10-21 | Rehabilitationsvorrichtung |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3880147B1 (de) |
| DE (1) | DE102018219446A1 (de) |
| WO (1) | WO2020099066A1 (de) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200323740A1 (en) * | 2019-04-12 | 2020-10-15 | Katina Johnson | Protective pad for a nipple |
| CN115445153B (zh) * | 2022-09-22 | 2023-06-30 | 安阳工学院 | 一种脑卒中患者上肢康复运动训练器 |
| WO2024228206A1 (en) * | 2023-05-03 | 2024-11-07 | INDIAN INSTITUTE OF TECHNOLOGY MADRAS (IIT Madras) | A single-dof mobile arm support (mars) device for assistive applications |
| DE102023121972A1 (de) * | 2023-08-16 | 2025-02-20 | Matthias Berchtold | Vorrichtung zum beweglichen Lagern, Bewegen und/oder Erfassen eines Beines, System umfassend zwei derartige Vorrichtungen und Verfahren zum Betreiben derselben |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080009771A1 (en) * | 2006-03-29 | 2008-01-10 | Joel Perry | Exoskeleton |
| US9358173B2 (en) * | 2008-05-09 | 2016-06-07 | National Taiwan University | Rehabilitation and training apparatus and method of controlling the same |
| FR2993333B1 (fr) * | 2012-07-11 | 2014-08-22 | Commissariat Energie Atomique | Dispositif de transmission de mouvement a reducteur epicycloidal, reducteur epicycloidal et bras de manipulation |
| CA2957825C (en) * | 2013-09-27 | 2023-03-21 | Barrett Technology, Inc. | Multi-active-axis, non-exoskeletal rehabilitation device |
| DE102016210498A1 (de) * | 2016-06-14 | 2017-12-14 | Kuka Roboter Gmbh | Patientenpositioniervorrichtung und medizinischer Arbeitsplatz |
| CN106078710B (zh) * | 2016-07-06 | 2018-03-06 | 英华达(上海)科技有限公司 | 多任务应用的多轴机器人 |
| WO2018086748A2 (de) * | 2016-11-14 | 2018-05-17 | Kuka Roboter Gmbh | Roboterarm, mobiler roboter und logistiksystem |
-
2018
- 2018-11-14 DE DE102018219446.7A patent/DE102018219446A1/de active Pending
-
2019
- 2019-10-21 WO PCT/EP2019/078486 patent/WO2020099066A1/de not_active Ceased
- 2019-10-21 EP EP19794455.6A patent/EP3880147B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020099066A1 (de) | 2020-05-22 |
| EP3880147A1 (de) | 2021-09-22 |
| DE102018219446A1 (de) | 2020-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3880147B1 (de) | Rehabilitationsvorrichtung | |
| EP1986826B1 (de) | Roboterarm | |
| EP3050550B1 (de) | Vorrichtung für das Training und die therapeutische Behandlung und/oder Unterstützung der unteren Extremitäten eines Menschen | |
| EP3475033B1 (de) | Exoskelett und statthalter | |
| EP2435008B1 (de) | Vorrichtung zur therapeutischen behandlung und/oder zum training der unteren extremitäten eines menschen | |
| EP3541483B1 (de) | Vorrichtung zum trainieren der unteren und/oder oberen extremitäten einer person | |
| EP2750653B1 (de) | Therapeutischer gehtrainer | |
| EP3071373B1 (de) | Roboterarm | |
| DE69918569T2 (de) | Chirurgischer manipulator | |
| WO2017157941A1 (de) | Exoskelett für einen menschen | |
| EP4122652A1 (de) | Vorrichtung zum unterstützen beider arme eines benutzers | |
| EP1827349A1 (de) | System und verfahren für die kooperative armtherapie sowie rotationsmodul dafür | |
| US20210322250A1 (en) | Driving system for controlling the movement of an object with two degrees of freedom of rotation and rehabilitation machine for rehabilitation of the lower limbs and the trunk incorporating such a system | |
| EP2724825B1 (de) | Arbeitstisch, aufweisend eine Vorrichtung zum Durchführen eines Bewegungsablaufs | |
| DE102008007580A1 (de) | Multifunktionales Trainingsgerät für menschliche Gangvarianten | |
| DE60302956T2 (de) | Orthopädische Arm- und Schulterschiene | |
| WO2018091037A1 (de) | System und verfahren zur reduktion von auf eine wirbelsäule wirkenden kräften | |
| DE3718643A1 (de) | Trainingsgeraet | |
| DE102006035715A1 (de) | Robotergestützter Laufsimulator | |
| DE10137955B4 (de) | Verfahren zur Bewegungskommandierung eines Serviceroboters | |
| EP4304815B1 (de) | Extremitätenunterstützungsvorrichtung und verfahren zum heben, halten und/oder tragen einer last und/oder zum ausführen von überkopftätigkeiten | |
| WO2025036931A1 (de) | Vorrichtung zum beweglichen lagern, bewegen und/oder erfassen eines beines, system umfassend zwei derartige vorrichtungen und verfahren zum betreiben derselben | |
| DE202006011767U1 (de) | Robotergestützter Laufsimulator | |
| AT504269B1 (de) | Gerät für die passive heilgymnastik | |
| EP3549571A1 (de) | Vorrichtung für das training, die therapeutische behandlung und/oder die unterstützung der unteren extremitäten eines menschen und verwendung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20210514 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230528 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20240419 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20241029 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019013090 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250619 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250620 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250721 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250904 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250908 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250719 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: U11 Free format text: ST27 STATUS EVENT CODE: U-0-0-U10-U11 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251101 |