EP3671690A1 - Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic - Google Patents
Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic Download PDFInfo
- Publication number
- EP3671690A1 EP3671690A1 EP18214063.2A EP18214063A EP3671690A1 EP 3671690 A1 EP3671690 A1 EP 3671690A1 EP 18214063 A EP18214063 A EP 18214063A EP 3671690 A1 EP3671690 A1 EP 3671690A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- format
- lane
- vehicles
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/164—Centralised systems, e.g. external to vehicles
Definitions
- the invention relates to a method for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, according to the preamble of claim 1, a computer program product for controlling at least partially automated vehicles in a lane hazard zone, in particular Intersections of roadways in road traffic, according to the preamble of claim 6, a central control unit for controlling at least partially automated vehicles in a lane danger area, in particular intersections of roadways in road traffic, according to the preamble of claim 10 and a control system for controlling at least partially automated vehicles in one Roadway danger zone, in particular intersections of roadways in road traffic, according to the preamble of claim 16.
- a hazard area in road traffic is an area where a hazard exists, which is defined as the possibility that a person, a thing, an animal, or even a natural death encounters at least one of the sources of time and space as a potential source of damage. This is usually the case in the lane area, which is why one speaks of a lane danger area. Based on these definitions, a typical, if not the only, lane danger area in road traffic is the area where one or more lanes meet - the lane intersection or, in short, the intersection.
- intersections In or at intersections, there may be conflicts of interest among road users who want to cross the intersection at the same time come. So there is a need for regulation. For this reason, intersections are currently protected by traffic signs, eg signaling signs in the form of traffic lights, or by traffic rules.
- traffic signs eg signaling signs in the form of traffic lights
- FIGURE 1 shows in a schematic diagram the current situation in the regulation of a lane traffic, eg road traffic, in lane danger areas FGB in the form of a "double-T" crossing KZ * or "T" crossing KZ **.
- intersection KZ * all road users who move in the "NORD-> SÜD- or SÜD-> NORD" direction can pass the intersection KZ * because the traffic lights for these road users have the green signal sign show, while all road users who move in "WEST-> OST- or OST-> WEST" direction cannot pass the KZ * intersection, e.g. have to wait at or in front of the traffic lights because the traffic lights show the red signal for these road users.
- the situation is different at the "T" crossing KZ **.
- the road users who move in the "WEST-> OST- or OST->WEST” direction or in the NORTH direction are due to the traffic lights with a green signal sign or no signal sign (applies to vehicles FZ 35 , FZ 36 , are traveling in the NORTH direction) authorized to pass the intersection or to move on, whereas the road users who are traveling in the "SOUTH” direction have to wait at or in front of the traffic light system because the traffic light systems show the red signal for these road users.
- a prerequisite for such a concept is that, firstly, the transport infrastructure is adapted, for example in cities through expensive construction measures (see description of FIGURE 2 ), and secondly, almost exclusively autonomously operated vehicles take part in traffic, which are also equipped with the latest communication and sensor technology.
- the object on which the invention is based is to specify a method, a computer program product, a central control unit and a control system for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, in which the Vehicles are controlled in such a way that they can pass the lane danger area in a flowing flow of traffic without stopping-starting interruptions, such as those that arise, for example, from signaling systems, preferably traffic lights.
- the normal case is assumed in which the at least partially automated vehicles pass the danger zone or the intersection without any peculiarities in terms of vehicle properties and driving behavior in the danger / intersection area.
- the at least partially automated vehicle that wants to pass the lane danger area or the intersection has an excess length of vehicle or - special case 2 -
- the at least partially automated vehicle that wants to pass the lane danger area or the intersection which intends to change the lane in the danger / intersection area, requires an adapted vehicle control in the special cases mentioned compared to the normal case dealt with in the present patent application. What this adaptation in the vehicle control system looks like for the two special cases is dealt with in parallel patent applications.
- the traffic no longer needs to be interrupted.
- traffic control measures such as traffic lights, traffic signs, pedestrian crossings, etc. are no longer required.
- the vehicle availability powers are preferably given with the aid of first control data, which each vehicle transmits to the central control unit when the roadway danger zone approaches.
- the control of the vehicle movements of each vehicle of the vehicles as a result of the vehicle availability powers is preferably carried out with the aid of second control data, which are transmitted to the central control unit for each vehicle to pass through the lane danger zone.
- the central control entity is preferably a central control unit consisting of a control device with a computer program product, which contains a non-volatile, readable memory in which processor-readable control program commands of a program module performing vehicle control are stored, and a processor connected to the memory , which executes the control program commands of the program module for vehicle control, a control interface and at least one communication device which is connected in terms of communication technology either to the control device and therein to the computer program product via the control interface or to the control device and the computer program product therein assigned.
- control device is preferably and advantageously designed as an open cloud computing platform.
- the communication device is arranged in the roadway danger zone in such a way that it is connected to a vehicle communication interface contained in the vehicles for vehicle control.
- This connection is preferably of a radio-technical nature, for example designed according to a mobile radio standard of the generation 5G.
- the number of communication devices exists in the lane danger zone, for example in a "double T" intersection (cf. FIGURES 1 and 2nd ), preferably from four individual communication devices, which are positioned at all four intersection corners in order to always have an optimal radio connection to the vehicles or the respective vehicle communication interface.
- Dynamic, vehicle-coordinated and collision-free in the context of the invention means that the vehicle movements of the respective vehicle are coordinated with the movements of the other vehicles in the lane-danger zone by means of the digital lane-danger zone twin at any location and at any time so that the respective one Vehicle passes the lane danger area without any collision with the other vehicles.
- each vehicle is moved in accordance with a spatio-temporal movement pattern in the lane danger zone in such a way that it is ensured that all vehicles in the lane danger zone that release the vehicle power to control the dynamic driving tasks have to be able to pass it without collision.
- a core area of the grid format represents the lane danger zone and first format fields of the grid format, depending on the format field change, either "WEST-> OST- and / or OST->WEST" vehicle movement directions or "NORD"-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions and second format fields of the raster format depending on the format field change either "NORTH-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions or "WEST-> EAST and / or EAST-> WEST "vehicle movement directions, each with at most one vehicle per first format field or second format field.
- each vehicle movement of the vehicle to pass the lane danger zone is controlled automatically, dynamically, vehicle-coordinated and - collision-free due to the given vehicle disposal powers - that corresponds to the situation in the lane-danger zone the vehicle in the core area of the grid format according to a digital movement with a START point and a DESTINATION point in the grid format, which is based on a format field change, either from a first format field of the first format fields as the START point of the digital movement to an adjacent second format field of the second format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement, or from a second format field of the second format fields as the START point of the digital movement to an adjacent first format field of the first format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement, is moved digitally.
- the advantageous further development of the vehicle control system according to the invention means that the vehicle power is available to everyone Vehicle returned from the central control instance. This can be achieved in a simple and advantageous manner with the aid of a further handshake protocol. In the course of this further handshake protocol, third control data initiating the return of the vehicle power is then transmitted to the vehicle.
- the at least partially automated, motorized vehicles FZ 1 ... FZ 36 are distributed in the manner shown to the roadway danger zones FGB designed as a "double-T" intersection KZ and as a "T" intersection KZ '.
- the vehicle control at least partially automated, motorized vehicles in the lane danger area come according to the explanations in connection with the description of FIGURE 1 only vehicles of the classification levels "3" to "5" in question and possibly also those of the level "2".
- the central control unit STGE of the control system STGS shown as an example is, according to this representation, at least only for vehicle control partially automated, motorized vehicles in the FGB lane danger zone designed as a "double-T" intersection.
- the vehicle control of the road danger zones FGB designed as a "T" intersection KZ 'and each further road danger zone FGB in the control system STGS, both in the FIGURE 2 not explicitly shown, can either be taken over by the control unit STGE shown or in each case by further control units, not shown.
- the lane danger area FGB designed as a "double-T" intersection KZ will be considered in more detail.
- the "double T" crossing KZ * in the FIGURE 1 moves a dynamically changing and continuously moving number of vehicles of the at least partially automated, motorized vehicles FZ 1 ...
- the central control unit STGE has a control device STER and at least one communication device KOER, which are either connected to one another or assigned to one another in terms of communication technology.
- control device STER is preferably and advantageously designed as an open cloud computing platform.
- the communication device KOER is preferably a radio communication device designed for the mobile radio standard of the 5th generation (5G) and is in both cases ("either" option and “or” option) in the lane designed as a "double-T" crossing KZ
- the danger area FGB is arranged in such a way that the danger / intersection area FGB, KZ is optimally covered in terms of radio technology and in such a way that the at least partially automated, motorized vehicles located in the danger / intersection area FGB, KZ reach the vehicle control via radio at any time - and are responsive.
- KZ there are, for example, four individual communication devices or radio communication devices KOER, which are positioned at all four intersection corners in order to always have an optimal radio connection to the vehicles in the danger / intersection area FGB, KZ.
- Each vehicle FZ i - in general - and the considered vehicles FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 - in particular - of the at least partially automated, motorized vehicles FZ 1 ... FZ 36 exist if they approach or approach the danger / intersection area FGB, KZ for passing through the carriageway danger area FGB or the "double-T" intersection KZ, a vehicle availability force for vehicle control of dynamic driving tasks in the respective vehicle.
- the expression "approaching" means that the vehicle must have given the vehicle power in good time before the vehicle enters the danger / intersection area FGB, KZ, because otherwise collision-free vehicle control in the danger / intersection area FGB, KZ is not ensured can be.
- This "handshake protocol" agreement is made on the one hand in terms of communication technology via the radio connection between the vehicle communication interface or vehicle radio communication interface FZKS and the communication device or radio communication device KOER and on the other hand between the communication device KOER and the control device STER.
- the vehicle availability is preferably given with the aid of first control data STGD 1 , which each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as the danger / intersection area approaches FGB, KZ or in the run-up to communication technology, via the transmission path shown above to the control device STER in the central control unit STGE.
- first control data STGD 1 are transmitted in the course of the handshake protocol to the control device STER in the central control unit STGE if the handover of the vehicle is already agreed in advance of the approach.
- FIGURE 3 shows the basic structure of the control device STER in the control unit STGE in the FIGURE 2 shown control system STGS for vehicle control by generating a lane-danger zone twin FGBZ.
- the control device STER has a control interface STSS and a computer program product CPP for vehicle control of the at least partially automated, motorized vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 in the danger zone. / Crossing area FGB, KZ on.
- the computer program product CPP contains a non-volatile, readable memory SP, in which processor-readable control program instructions of a program module PGM carrying out the vehicle control are stored, and a processor PZ connected to the memory SP, which stores the control program instructions of the program module PGM for vehicle control and is connected to the control interface STSS.
- the processor PZ then generates the digital lane danger area with the receipt of the first control data STGD 1 and the delivery of the vehicle availability powers by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31.
- Twin FGBZ by means of the vehicle movements of vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the given vehicle disposition powers to pass the road hazard area FGB or the "double T" -Crossing KZ can be controlled automatically, dynamically, vehicle-coordinated and - collision-free.
- the processor PZ generates second control data STGD 2 on the basis of the generated digital lane-danger zone twin FGBZ, which reach the communication device KOER or the radio communication device KOER via the control interface STSS and from there as shown in FIG FIGURE 2 Via the vehicle communication interface or vehicle radio communication interface FZKS ultimately into the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 , which means that they pass through the road hazard area FGB or the "double-T" intersection can be controlled.
- the processor PZ executes the program module PGM for each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the vehicle disposal powers given by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 and using the communication path between these vehicles and the control device STER or the computer program -Product CPP vehicle trajectory and vehicle speed determined.
- the processor PZ determines when executing the program module PGM which vehicles pass the lane-danger zone FGB or the "double-T" intersection Have passed the concentration camp. As shown in the FIGURE 2 these are the vehicles FZ i , FZ 3 , FZ 16 .
- the vehicle disposal powers given by these vehicles FZ i , FZ 3 , FZ 16 for passing through the road danger zone FGB or the "double-T" intersection KZ are generated by each processor FZ i , FZ 3 , FZ 16 by the processor PZ, Returned third control data STGD 3 via the existing communication path between these vehicles and the control device STER or the computer program product CPP.
- the third control data STGD 3 is preferably transmitted in the course of a further handshake protocol between the control device STER via the communication device KOER and the vehicle FZ i , FZ 3 , FZ 16 .
- the vehicle movements of the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 to pass the lane danger area FGB or the "double-T" intersection KZ are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner and then furthermore it is recognized and determined when a vehicle enters the carriageway danger area FGB or the "double-T" intersection KZ happened in the following using FIGURE 4 explained.
- FIGURE 4 shows a first digital representation DRP1 of a first traffic situation created by the lane-danger zone twin FGBZ, when it was generated in the control device STER or the computer program product CPP, with a lane completely occupied and occupied by at least partially automated, motorized vehicles. Danger area in the form of a "double T" crossing.
- the first traffic situation has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the first digital representation DPR1 shown is intended to explain in general how vehicle movements at least partially automated, motorized vehicles, which completely drive and occupy the "double-T" intersection, are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass them.
- the first traffic situation shown is 30 vehicles, represented by white circles in the first format fields FF1, digital and unidirectional in EAST-> WEST direction and 22 vehicles, represented by black circles in the second format fields FF2, digital and unidirectional in NORTH-> SOUTH -Direction and uniform in the entire raster format RF, with the double arrows on the white circles and the arrows on the black circles always indicate the respective direction of movement.
- the format fields FF1, FF2 of the raster format RF of the first digital representation DRP1 are selected such that vehicles with normal, normal and defined vehicle length are represented digitally in the fields at rest and in motion without touching one another.
- the first traffic situation according to the FIGURE 4 transferred to the "double-T" intersection in the FIGURE 2 , means that two lane directions with 6 parallel lanes each, lane with 6 parallel lanes in the EAST-> WEST direction and lane with 6 parallel lanes in the NORTH-> SOUTH direction intersect and in the intersection area corresponds to the key area KB of the grid format RF (chess board with 36 fields), 18 vehicles are traveling in the EAST-> WEST direction and NORTH-> SOUTH direction.
- each vehicle movement of the 36 vehicles to pass the "double-T" intersection is controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly each vehicle of the 36 vehicles in the core area KB of the raster format RF according to a digital movement with a START point and a DEST point in the raster format RF, which is based on a format field change, either from a first format field of the first format fields FF1 as the START point of the digital movement to an adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - i.e.
- FIGURE 3 can be achieved in a simple and advantageous manner using the further handshake protocol.
- FIGURE 5 shows - as in the FIGURE 4 - One by the lane-danger zone twin FGBZ, after its generation in the control device STER or the computer program product CPP FIGURE 3 , created second digital representation DRP2 of a second traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection.
- the second traffic situation also has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the second digital representation DPR2 shown should also be explained in a very general way how vehicle movements of the at least partially automated, motorized vehicles which completely drive and occupy the "double-T" intersection are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass through them.
- the second traffic situation shown shows 32 vehicles, represented by white circles in the first format fields FF1, digital and bidirectional, of which 17 vehicles in the EAST-> WEST direction, 15 vehicles in the WEST-> EAST direction and 21 vehicles, represented by black circles in the second format fields FF2, digital and bidirectional of which 11 vehicles in the NORTH-> SOUTH direction and 10 vehicles in the SOUTH-> NORTH direction and all in the entire raster format RF, with the double arrows on the white circles and the arrows on the black ones Circles always indicate the respective direction of movement.
- the second traffic situation in the FIGURE 5 through four lane directions, each with 3 parallel, side-by-side lanes - one lane with 3 parallel, side-by-side lanes in the EAST-> WEST direction, one lane with 3 parallel, side-by-side lanes in the opposite direction, in the WEST-> EAST direction, one lane with 3 parallel, side-by-side lanes in the NORTH-> SOUTH direction and one lane with 3 parallel, side-by-side lanes in the opposite direction, in the SOUTH-> NORTH direction - marked, which intersect, and in the in the intersection area - corresponds to the core area KB of Grid format RF (chess board with 36 fields) - 9 vehicles are traveling in EAST-> WEST direction, in WEST-> EAST direction, in NORTH-> SOUTH direction and SOUTH-> NORTH direction.
- Grid format RF chess board with 36 fields
- each vehicle movement of the 36 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly each vehicle of the 36 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either from the first format field of the first format fields FF1 as the START point of the digital movement to the adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent any of the 36 vehicles - is digitally free for digital movement, or from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - that is, digitally free for the digital movement, is moved digitally.
- the finite chain reaction of successive digital movements takes place, which begins, for example, on the basis of the FIGURE 5 , with the first digital movement from the format field FF1 x of the first format fields FF1, which represents the vehicle FZ x , as the START point to the format field FF2 y of the second format fields FF2 as the DESTINATION point, which represents no vehicle, that is to say is digitally free, and has its end when all 36 vehicles that were initially in the core area KB of the raster format RF have left the key area KB of the raster format RF.
- FIGURE 3 can be achieved again in a simple and advantageous manner with the aid of the further handshake protocol.
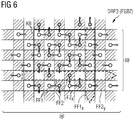
- FIGURE 6 shows - as in the FIGURES 4 and 5 - One by the lane-danger zone twin FGBZ, when it is generated in the control device STER or the computer program product CPP after FIGURE 3 , created third digital representation DRP3 of a third traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection.
- the third traffic situation - like the first and second traffic situation - has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the third digital representation DPR3 shown is also intended to be explained in a very general way how vehicle movements of the at least partially automated, motorized vehicles which completely drive and occupy the "double-T" intersection are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass them.
- the third traffic situation in the FIGURE 6 due to four lane directions with 3 parallel, not all adjacent lanes - one lane with 3 parallel, not all adjacent lanes in the EAST-> WEST direction, one lane with 3 parallel, not all adjacent lanes in the opposite direction, in the WEST-> EAST -Direction, a lane with 3 parallel lanes, not all adjacent lanes in the NORTH-> SOUTH direction and a lane with 3 parallel lanes, not all adjacent Lanes in the opposite direction, in the SOUTH-> NORTH direction - marked, which intersect, and in the in the intersection area - corresponds to the core area KB of the raster format RF (chess board with 36 fields) - 9 vehicles in the EAST-> WEST direction, 6 Vehicles in WEST-> EAST direction, 9 vehicles in NORTH-> SOUTH direction and 6 vehicles in SOUTH-> NORTH direction.
- each vehicle movement of the 30 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly again each vehicle of the 30 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either from the first format field of the first format fields FF1 as the START point of the digital movement to the neighboring second Format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - that is, digitally free for the digital movement, or from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - i.e. is digitally free
- the finite chain reaction of successive digital movements takes place, which begins, for example, on the basis of the FIGURE 6 , with the first digital movement from the format field FF1 x of the first format fields FF1, which represents the vehicle FZ x , as the START point to the format field FF2 y of the second format fields FF2 as the DESTINATION point, which represents no vehicle, that is to say is digitally free, and has its end when all 30 vehicles that were initially in the core area KB of the raster format RF have left the key area KB of the raster format RF.
- FIGURE 3 can also be achieved again in a simple and advantageous manner with the aid of the further handshake protocol.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Abstract
Um zumindest teilautomatisierte Fahrzeuge (FZ<sub>1</sub>...FZ<sub>n</sub>) in einem Fahrbahn-Gefahrenbereich (FGB), insbesondere Kreuzungen (KZ, KZ') von Fahrbahnen im Straßenverkehr so zu steuern, dass diese in einem fließenden Fahrfluss ohne Anhalt-Anfahr-Unterbrechungen, wie sie beispielsweise durch zeichengebenden Anlagen, vorzugsweise Ampeln, entstehen, den Fahrbahn-Gefahrenbereich passieren können, wird es vorgeschlagen, dassa) jedes Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) der Fahrzeuge (FZ<sub>1</sub>...FZ<sub>n</sub>) beim Sich-Nähern des Fahrbahn-Gefahrenbereichs (FGB, KZ, KZ') zum Passieren desjenigen eine Fahrzeugverfügungsgewalt zur Fahrzeugsteuerung von dynamischen Fahraufgaben abgibt,b) mit der Abgabe der Fahrzeugverfügungsgewalten durch die Fahrzeuge (FZ<sub>1</sub>...FZ<sub>n</sub>) von einer zentralen Steuerungsinstanz (STGE, STER, CPP, PZ, SP, PGM) ein digitaler Fahrbahn-Gefahrenbereich-Zwilling (FGBZ) erzeugt wird, mittels dem infolge der abgegebenen Fahrzeugverfügungsgewalten Fahrzeugbewegungen des Fahrzeugs (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) zum Passieren des Fahrbahn-Gefahrenbereichs (FGB, KZ, KZ') automatisch, dynamisch, fahrzeugkoordiniert und - kollisionsfrei gesteuert werden.To at least partially automated vehicles (FZ <sub> 1 </sub> ... FZ <sub> n </sub>) in a lane danger zone (FGB), in particular intersections (KZ, KZ ') of lanes in road traffic To control that these can pass the lane danger zone in a flowing flow of traffic without stopping / starting interruptions, such as those caused by signaling systems, preferably traffic lights, it is proposed that a) every vehicle (FZi, FZ2, FZ11, FZ14 , FZ15, FZ18, FZ22, FZ31) of the vehicles (FZ <sub> 1 </sub> ... FZ <sub> n </sub>) when approaching the road danger zone (FGB, KZ, KZ ') a vehicle control authority for vehicle control of dynamic driving tasks to pass through, b) with the vehicle control power transfer by the vehicles (FZ <sub> 1 </sub> ... FZ <sub> n </sub>) from a central control entity ( STGE, STER, CPP, PZ, SP, PGM) a digital lane-danger zone twin (FGBZ) is generated by means of the given Vehicle control powers Vehicle movements of the vehicle (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) for passing through the lane danger zone (FGB, KZ, KZ ') are controlled automatically, dynamically, vehicle-coordinated and - collision-free.
Description
Die Erfindung bezieht sich auf ein Verfahren zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, gemäß dem Oberbegriff des Patentanspruches 1, ein Computer-Programm-Produkt zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, gemäß dem Oberbegriff des Patentanspruches 6, eine zentrale Steuerungseinheit zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, gemäß dem Oberbegriff des Patentanspruches 10 und ein Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, gemäß dem Oberbegriff des Patentanspruches 16.The invention relates to a method for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, according to the preamble of claim 1, a computer program product for controlling at least partially automated vehicles in a lane hazard zone, in particular Intersections of roadways in road traffic, according to the preamble of claim 6, a central control unit for controlling at least partially automated vehicles in a lane danger area, in particular intersections of roadways in road traffic, according to the preamble of claim 10 and a control system for controlling at least partially automated vehicles in one Roadway danger zone, in particular intersections of roadways in road traffic, according to the preamble of claim 16.
Ein Gefahrenbereich im Straßenverkehr ist ein Bereich wo eine Gefährdung gegeben ist, die definiert wird als die Möglichkeit, dass eine Person, eine Sache, ein Tier, oder sogar eine natürliche Lebensgrundlage zumindest eines von zeitlich und räumlich auf eine Gefahrenquelle als potentielle Schadensquelle trifft. Dies ist in der Regel im Fahrbahnbereich der Fall, weshalb man auch von einem Fahrbahn-Gefahrenbereich spricht. Ausgehend von diesen Definitionen ist ein typischer wenngleich nicht der einzige Fahrbahn-Gefahrenbereich im Straßenverkehr der Bereich, wo eine oder mehrere Fahrbahnen sich treffen - die Fahrbahn-Kreuzung oder kurz die Kreuzung.A hazard area in road traffic is an area where a hazard exists, which is defined as the possibility that a person, a thing, an animal, or even a natural livelihood encounters at least one of the sources of time and space as a potential source of damage. This is usually the case in the lane area, which is why one speaks of a lane danger area. Based on these definitions, a typical, if not the only, lane danger area in road traffic is the area where one or more lanes meet - the lane intersection or, in short, the intersection.
In oder an Kreuzungen kann es unter den Verkehrsteilnehmern, die die Kreuzung zur selben Zeit befahren wollen, zu Interessenskonflikten kommen. Es besteht also Regelungsbedarf. Aus diesem Grund sind Kreuzungen derzeit durch Verkehrszeichen, z.B. signalgebende Zeichen in Gestalt von Ampelanlagen, oder durch Verkehrsregeln geschützt.In or at intersections, there may be conflicts of interest among road users who want to cross the intersection at the same time come. So there is a need for regulation. For this reason, intersections are currently protected by traffic signs, eg signaling signs in the form of traffic lights, or by traffic rules.
So können an der "Doppel-T"-Kreuzung KZ* alle Verkehrsteilnehmer, die sich in "NORD->SÜD- oder SÜD->NORD"-Richtung bewegen, die Kreuzung KZ* passieren, weil die Ampelanlagen für diese Verkehrsteilnehmer das grüne Signalzeichen zeigen, während alle Verkehrsteilnehmer, die sich in "WEST->OST- oder OST->WEST"-Richtung bewegen, die Kreuzung KZ* nicht passieren können, also z.B. an bzw. vor der Ampelanlage warten müssen, weil die Ampelanlagen für diese Verkehrsteilnehmer das rote Signalzeichen zeigen.Thus, at the "Doppel-T" intersection KZ * all road users who move in the "NORD-> SÜD- or SÜD-> NORD" direction can pass the intersection KZ * because the traffic lights for these road users have the green signal sign show, while all road users who move in "WEST-> OST- or OST-> WEST" direction cannot pass the KZ * intersection, e.g. have to wait at or in front of the traffic lights because the traffic lights show the red signal for these road users.
Anders verhält es sich an der "T"-Kreuzung KZ**. Dort sind die Verkehrsteilnehmer, die sich in "WEST->OST- oder OST->WEST"-Richtung oder in NORD-Richtung bewegen, aufgrund der Ampelanlagen mit grünem Signalzeichen oder keinem Signalzeichen (gilt für die Fahrzeuge FZ35, FZ36, die in NORD-Richtung unterwegs sind) berechtigt die Kreuzung zu passieren bzw. sich weiterzubewegen, wohingegen die Verkehrsteilnehmer, die in "SÜD"-Richtung unterwegs sind, an bzw. vor der Ampelanlage warten müssen, weil die Ampelanlagen für diese Verkehrsteilnehmer das rote Signalzeichen zeigen.The situation is different at the "T" crossing KZ **. There, the road users who move in the "WEST-> OST- or OST->WEST" direction or in the NORTH direction are due to the traffic lights with a green signal sign or no signal sign (applies to vehicles FZ 35 , FZ 36 , are traveling in the NORTH direction) authorized to pass the intersection or to move on, whereas the road users who are traveling in the "SOUTH" direction have to wait at or in front of the traffic light system because the traffic light systems show the red signal for these road users.
Was die Automatisierung der motorisierten Fahrzeuge FZ1...FZ37 in dem Prinzipschaubild anbetrifft, die z.B., wie dargestellt, als Personenkraftwagen und Lastkraftwagen mit unterschiedlichen Fahrzeuglängen und Motorleistungen sowie als Motorrad im Straßenverkehr unterwegs sind, so bleibt - Stand heute - vor dem Hintergrund der von der SAE International (ehemals: Society of Automotive Engineers) in der publizierten Spezifikation SAE J3016 definierten Autonomiestufen für motorisierte Straßenfahrzeuge mit Steuerungssystemen zum Autonomen Fahren, die in sechs SAE-Stufen (Stufe "0" bis Stufe "5") von keiner Automatisierung (Stufe "0"), Assistenzunterstützung (Stufe "1"), Teilautomatisierung (Stufe "2"), Bedingte Automatisierung (Stufe "3"), Hochautomatisierung (Stufe "4") bis Vollautomatisierung (Stufe "5") klassifiziert wird, festzustellen, dass die dargestellten Fahrzeuge FZ1...FZ36 fast ausnahmslos, bis auf wenige, die der Stufe "2" zugerechnet werden könnten, der Stufe "0" oder der Stufe "1" zuzuordnen sind.As for the automation of motorized vehicles FZ 1 ... FZ 37 in the schematic diagram, which, for example, as shown, are on the road as passenger cars and lorries with different vehicle lengths and engine outputs as well as motorcycles, as things stand today the autonomy levels defined by SAE International (formerly: Society of Automotive Engineers) in the published specification SAE J3016 for motorized road vehicles with control systems for autonomous driving, which in six SAE levels (level "0" to level "5") of no automation (Level "0"), assistance support (level "1"), partial automation (level "2"), conditional automation (level "3"), high automation (level "4") until full automation (level "5") is classified, determine that the vehicles shown FZ 1 ... FZ 36 almost without exception, with the exception of a few that could be assigned to level "2", level "0" or S level "1" can be assigned.
Wenn nun im Sinne der Erfindung zumindest teilautomatisierte Fahrzeuge in dem Fahrbahn-Gefahrenbereich FGB, KZ, KZ' gesteuert werden sollen, so kämen hierfür gemäß der SAE-Autonomiestufendefinition im Prinzip nur Fahrzeuge der Klassifizierungsstufen "3" bis "5" in Frage sowie gegebenenfalls auch solche der Stufe "2".If, according to the invention, at least partially automated vehicles are to be controlled in the lane danger zone FGB, KZ, KZ ', then in principle only vehicles of the classification levels "3" to "5" would come into question according to the SAE autonomy level definition and possibly also those of level "2".
Wie könnte jetzt eine solche Fahrzeugsteuerung zumindest teilautomatisierter Fahrzeuge in Fahrbahn-Gefahrenbereichen im Straßenverkehr aussehen, wenn nicht mehr die genannten Verkehrsregelungsmaßnahmen, wie z.B. Ampelanlagen, die das Straßenbild im Industriezeitalter geprägt haben, maßgebend für ein zukünftiges Verkehrskonzept im Digitalen Zeitalter sind?What could such a vehicle control system look like, at least partially automated vehicles in lane danger areas in road traffic, if the traffic control measures mentioned, such as traffic lights, which shaped the street scene in the industrial age, are no longer decisive for a future traffic concept in the digital age?
Gemäß einem Vorschlag des Autorenteams "Tachet Remi;
Voraussetzung für ein derartiges Konzept ist allerdings, dass erstens die Verkehrsinfrastruktur angepasst wird, z.B. in Städten durch teure Baumaßnahmen (vgl. Beschreibung von
In der nachveröffentlichten DE-Patentanmeldung (Anmeldeaktenzeichen:
- eine Ermittlungseinheit zum Ermitteln, ob sich das Fahrzeug in dem Gefahrenbereich oder in einem an dem Gefahrenbereich angrenzenden Übergangsbereich befindet;
- eine Kommunikationseinheit zum Empfangen von Fahrzeugdaten von dem Fahrzeug, falls die Ermittlungseinheit ermittelt, dass sich das Fahrzeug in dem Gefahrenbereich oder in dem Übergangsbereich befindet; und
- eine Bestimmungseinheit zum Bestimmen einer Trajektorie für das Fahrzeug unter Berücksichtigung der empfangenen Fahrzeugdaten, um das Fahrzeug kollisionsfrei durch den Gefahrenbereich zu führen;
- eine dem Gefahrenbereich zugehörige Einrichtung ist, die die Steuerung der Fahrzeuge in dem Gefahrenbereich übernimmt, wodurch Kollisionen in dem Gefahrenbereich verhindert werden können.
- a determination unit for determining whether the vehicle is in the danger area or in a transition area adjacent to the danger area;
- a communication unit for receiving vehicle data from the vehicle if the determination unit determines that the vehicle is in the danger zone or in the transition zone; and
- a determination unit for determining a trajectory for the vehicle, taking into account the received vehicle data, in order to guide the vehicle through the danger zone without collisions;
- is a device belonging to the danger zone, which takes over the control of the vehicles in the danger zone, whereby collisions in the danger zone can be prevented.
Die der Erfindung zugrundeliegende Aufgabe besteht darin, ein Verfahren, ein Computer-Programm-Produkt, eine zentrale Steuerungseinheit und ein Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, anzugeben, bei dem bzw. der die Fahrzeuge derart gesteuert werden, dass diese in einem fließenden Fahrfluss ohne Anhalt-Anfahr-Unterbrechungen, wie sie beispielsweise durch zeichengebenden Anlagen, vorzugsweise Ampeln, entstehen, den Fahrbahn-Gefahrenbereich passieren können.The object on which the invention is based is to specify a method, a computer program product, a central control unit and a control system for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, in which the Vehicles are controlled in such a way that they can pass the lane danger area in a flowing flow of traffic without stopping-starting interruptions, such as those that arise, for example, from signaling systems, preferably traffic lights.
In der vorliegenden Patentanmeldung wird dabei von dem Normalfall ausgegangen, bei dem die zumindest teilautomatisierten Fahrzeuge den Fahrbahn-Gefahrenbereich bzw. die Kreuzung ohne jegliche Besonderheit, was die Fahrzeugeigenschaft und das Fahrverhalten im Gefahren-/Kreuzungsbereich anbetrifft, passieren. Liegt hingegen eine Besonderheit vor, weil z.B. - Spezialfall 1 - das zumindest teilautomatisierte Fahrzeug, was den Fahrbahn-Gefahrenbereich bzw. die Kreuzung passieren möchte, eine Fahrzeugüberlänge aufweist oder - Spezialfall 2 - das zumindest teilautomatisierte Fahrzeug, was den Fahrbahn-Gefahrenbereich bzw. die Kreuzung passieren möchte, die Fahrbahn im Gefahren-/Kreuzungsbereich beabsichtigt, zu wechseln, so bedarf es in den genannten Sonderfällen gegenüber dem in der vorliegenden Patentanmeldung behandelten Normalfall einer adaptierten Fahrzeugsteuerung. Wie diese Adaption in der Fahrzeugsteuerung für die beiden Spezialfälle aussieht, wird in zeitgleichen parallelen Patentanmeldungen behandelt.In the present patent application, the normal case is assumed in which the at least partially automated vehicles pass the danger zone or the intersection without any peculiarities in terms of vehicle properties and driving behavior in the danger / intersection area. However, there is a peculiarity because, for example - special case 1 - the at least partially automated vehicle that wants to pass the lane danger area or the intersection has an excess length of vehicle or - special case 2 - The at least partially automated vehicle that wants to pass the lane danger area or the intersection, which intends to change the lane in the danger / intersection area, requires an adapted vehicle control in the special cases mentioned compared to the normal case dealt with in the present patent application. What this adaptation in the vehicle control system looks like for the two special cases is dealt with in parallel patent applications.
Bezüglich des Spezialfalls 1 ist es die Patentanmeldung (Anmeldung-Nr......) mit der Bezeichnung "Verfahren, Computer-Programm-Produkt, Zentrale Steuerungseinheit und Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge, anteilig mit Fahrzeugüberlängen, in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr", deren Inhalt hiermit in der vorliegenden Patentanmeldung inkludiert und offenbart ist.Regarding special case 1, it is the patent application (application no ......) with the designation "method, computer program product, central control unit and control system for controlling at least partially automated vehicles, partly with excess vehicle length, in a lane danger zone "In particular intersections of roadways in road traffic", the content of which is hereby included and disclosed in the present patent application.
Bezüglich des Spezialfalls 2 ist es die Patentanmeldung (Anmeldung-Nr......) mit der Bezeichnung "Verfahren, Computer-Programm-Produkt, Zentrale Steuerungseinheit und Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge, anteilig mit Fahrbahnwechselabsichten, in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr", deren Inhalt hiermit in der vorliegenden Patentanmeldung inkludiert und offenbart ist.Regarding special case 2, it is the patent application (application no ......) with the designation "Process, computer program product, central control unit and control system for controlling at least partially automated vehicles, partly with intentions to change lanes, in a lane danger area "In particular intersections of roadways in road traffic", the content of which is hereby included and disclosed in the present patent application.
Die vorstehend bezeichnete Aufgabe wird ausgehend von dem im Oberbegriff des Patentanspruches 1 definierten Verfahren durch die im Kennzeichen des Patentanspruches 1 angegebenen Merkmale gelöst.The above-mentioned object is achieved on the basis of the method defined in the preamble of patent claim 1 by the features specified in the characterizing part of patent claim 1.
Darüber hinaus wird diese Aufgabe ausgehend von dem im Oberbegriff des Patentanspruches 6 definierten Computer-Programm-Produkt durch die im Kennzeichen des Patentanspruches 6 angegebenen Merkmale gelöst.In addition, this object is achieved on the basis of the computer program product defined in the preamble of claim 6 by the features specified in the characterizing part of claim 6.
Weiterhin wird diese Aufgabe ausgehend von der im Oberbegriff des Patentanspruches 10 definierten, zentralen Steuerungseinheit durch die im Kennzeichen des Patentanspruches 10 angegebenen Merkmale gelöst.Furthermore, this object is achieved on the basis of the central control unit defined in the preamble of claim 10 by the features specified in the characterizing part of claim 10.
Außerdem wird diese Aufgabe ausgehend von dem im Oberbegriff des Patentanspruches 16 definierten Steuerungssystem durch die im Kennzeichen des Patentanspruches 16 angegebenen Merkmale gelöst.In addition, this object is achieved on the basis of the control system defined in the preamble of claim 16 by the features specified in the characterizing part of claim 16.
Die der Erfindung zugrundeliegende Idee gemäß der in den Ansprüchen 1, 6, 10 und 16 jeweils angegebenen technischen Lehre besteht darin, dass zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr,
- die Fahrzeuge beim Sich-Nähern des Fahrbahn-Gefahrenbereichs zum Passieren desjenigen jeweils eine Fahrzeugverfügungsgewalt zur Fahrzeugsteuerung von dynamischen Fahraufgaben abgeben,
- mit dem Abgeben der Fahrzeugverfügungsgewalten durch die Fahrzeuge von einer zentralen Steuerungsinstanz ein digitaler Fahrbahn-Gefahrenbereich-Zwilling erzeugt wird, mittels dem infolge der abgegebenen Fahrzeugverfügungsgewalten Fahrzeugbewegungen von jedem Fahrzeug der Fahrzeuge zum Passieren des Fahrbahn-Gefahrenbereichs automatisch, dynamisch, fahrzeugkoordiniert und kollisionsfrei gesteuert werden.
- when the vehicle approaches the lane danger zone to pass through it, they give off a vehicle power to control dynamic driving tasks,
- When the vehicle control forces are released by the vehicles, a central control unit generates a digital lane-danger zone twin, by means of which vehicle movements of each vehicle of the vehicles for passing the vehicle danger zone are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner as a result of the delivered vehicle control forces.
Mit einer derartig durchgeführten Steuerung von zumindest teilautomatisierten Fahrzeugen in dem Fahrbahn-Gefahrenbereich braucht der Verkehr nicht mehr unterbrochen zu werden. Darüber hinaus sind keine Verkehrsregelungsmaßnahmen, wie z.B. Ampelanlagen, Verkehrsschilder, Zebrastreifen für Fußgänger, etc., mehr erforderlich. Weiterhin besteht keine Notwendigkeit für eine fest vorgegebene Fahrzeugbewegungsrichtung. Diese kann vielmehr genauso wie die Fahrzeuggeschwindigkeit beim Passieren des Fahrbahn-Gefahrenbereichs dynamisch je nach Verkehrssituation adaptiert werden.With such a control of at least partially automated vehicles in the lane danger zone, the traffic no longer needs to be interrupted. In addition, traffic control measures such as traffic lights, traffic signs, pedestrian crossings, etc. are no longer required. Furthermore, there is no need for a predetermined direction of vehicle movement. Rather, just like the vehicle speed when passing through the lane danger zone, this can be dynamically adapted depending on the traffic situation.
Die Fahrzeugverfügungsgewalten werden dabei bevorzugt mit Hilfe von ersten Steuerungsdaten abgegeben, die jedes Fahrzeug beim Sich-Nähern des Fahrbahn-Gefahrenbereichs der zentralen Steuerungsinstanz übermittelt.The vehicle availability powers are preferably given with the aid of first control data, which each vehicle transmits to the central control unit when the roadway danger zone approaches.
Das infolge der abgegebenen Fahrzeugverfügungsgewalten Steuern der Fahrzeugbewegungen von jedem Fahrzeug der Fahrzeuge erfolgt bevorzugt mit Hilfe von zweiten Steuerungsdaten, die jedem Fahrzeug zum Passieren des Fahrbahn-Gefahrenbereichs von der zentralen Steuerungsinstanz übermittelt werden.The control of the vehicle movements of each vehicle of the vehicles as a result of the vehicle availability powers is preferably carried out with the aid of second control data, which are transmitted to the central control unit for each vehicle to pass through the lane danger zone.
Die zentrale Steuerungsinstanz ist dabei vorzugsweise eine zentrale Steuerungseinheit bestehend aus Steuereinrichtung mit einem Computer-Programm-Produkt, das einen nicht-flüchtigen, lesbaren Speicher, in dem prozessorlesbare Steuerprogrammbefehle eines die Fahrzeugsteuerung durchführenden Programm-Moduls gespeichert sind, und einem mit dem Speicher verbundenen Prozessor, der die Steuerprogrammbefehle des Programm-Moduls zur Fahrzeugsteuerung ausführt, einer Steuerschnittstelle und mindestens einer Kommunikationseinrichtung, die kommunikationstechnisch entweder mit der Steuereinrichtung und darin mit dem Computer-Programm-Produkt über die Steuerschnittstelle verbunden ist oder der Steuereinrichtung und dem Computer-Programm-Produkt darin zugeordnet ist.The central control entity is preferably a central control unit consisting of a control device with a computer program product, which contains a non-volatile, readable memory in which processor-readable control program commands of a program module performing vehicle control are stored, and a processor connected to the memory , which executes the control program commands of the program module for vehicle control, a control interface and at least one communication device which is connected in terms of communication technology either to the control device and therein to the computer program product via the control interface or to the control device and the computer program product therein assigned.
Gemäß der "Oder"-Option ist die Steuereinrichtung vorzugsweise und in vorteilhafter Weise als eine offene Cloud Computing Plattform ausgebildet.According to the “or” option, the control device is preferably and advantageously designed as an open cloud computing platform.
Die Kommunikationseinrichtung ist in beiden Fällen in dem Fahrbahn-Gefahrenbereich derart angeordnet, dass diese zur Fahrzeugsteuerung jeweils mit einer in den Fahrzeugen jeweils enthaltenen Fahrzeug-Kommunikationsschnittstelle verbunden ist. Diese Verbindung ist bevorzugt funktechnischer Natur, so z.B. ausgebildet nach einem Mobilfunkstandard der Generation 5G. Die Anzahl der Kommunikationseinrichtungen besteht in dem Fahrbahn-Gefahrenbereich, z.B. in einer "Doppel-T"-Kreuzung (vgl.
Dynamisch, fahrzeugkoordiniert und kollisionsfrei im Kontext der Erfindung bedeutet dabei, dass die Fahrzeugbewegungen des jeweiligen Fahrzeugs mit Fahrbewegungen der übrigen Fahrzeuge in dem Fahrbahn-Gefahrenbereich mittels des digitalen Fahrbahn-Gefahrenbereich-Zwillings an jeden Ort und zu jedem Zeitpunkt so koordiniert werden, dass das jeweilige Fahrzeug ohne jegliche Kollision mit den übrigen Fahrzeugen den Fahrbahn-Gefahrenbereich passiert. Mit Hilfe des digitalen Fahrbahn-Gefahrenbereich-Zwillings wird also jedes Fahrzeug nach Maßgabe eines räumlich-zeitlichen Bewegungsmusters in dem Fahrbahn-Gefahrenbereich so bewegt, dass sichergestellt ist, dass alle Fahrzeuge in dem Fahrbahn-Gefahrenbereich, die die Fahrzeugverfügungsgewalt zur Fahrzeugsteuerung der dynamischen Fahraufgaben abgeben haben, diesen kollisionsfrei passieren können.Dynamic, vehicle-coordinated and collision-free in the context of the invention means that the vehicle movements of the respective vehicle are coordinated with the movements of the other vehicles in the lane-danger zone by means of the digital lane-danger zone twin at any location and at any time so that the respective one Vehicle passes the lane danger area without any collision with the other vehicles. With the help of the digital lane-danger zone twin, each vehicle is moved in accordance with a spatio-temporal movement pattern in the lane danger zone in such a way that it is ensured that all vehicles in the lane danger zone that release the vehicle power to control the dynamic driving tasks have to be able to pass it without collision.
Bei dieser Art der Fahrzeugsteuerung ist es gemäß einer Weiterbildung der Erfindung von Vorteil, dass bereits im Vorfeld (vgl. Ansprüche 2 und 11), wenn jedes Fahrzeug sich dem Fahrbahn-Gefahrenbereich nähert, das Abgeben der Fahrzeugverfügungsgewalt mittels eines Handshake-Protokolls zwischen dem jeweiligen Fahrzeug und der zentralen Steuerungsinstanz vereinbart wird. Im Zuge dieses Handshake-Protokolls erfolgt dann auch die Übermittlung der ersten Steuerungsdaten.With this type of vehicle control, it is advantageous according to a development of the invention that, in advance (cf. claims 2 and 11), when each vehicle approaches the danger zone on the road, the handing over of the vehicle is given by means of a handshake protocol between the respective vehicles Vehicle and the central control instance is agreed. The first control data is then transmitted in the course of this handshake protocol.
Darüber hinaus ist es gemäß einer weiteren Weiterbildung der erfindungsgemäßen Fahrzeugsteuerung vorteilhaft (vgl. Ansprüche 3, 7 und 12), dass für die Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings zur Fahrzeugsteuerung infolge der abgegebenen Fahrzeugverfügungsgewalt von jedem Fahrzeug der Fahrzeuge Fahrzeugtrajektorie und Fahrzeuggeschwindigkeit ermittelt werden.In addition, according to a further development of the vehicle control system according to the invention (cf. claims 3, 7 and 12), it is advantageous for each vehicle to determine the vehicle trajectory and vehicle speed for the generation of the digital lane-danger zone twin for vehicle control as a result of the vehicle availability power .
Darüber hinaus ist es für die Weiterbildung der erfindungsgemäßen Fahrzeugsteuerung zweckmäßig (vgl. Ansprüche 4, 8 und 13), dass mit der Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings Fahrzeugfahrtinformationen, aus und in welche Fahrtrichtungen sich die Fahrzeuge zum Passieren des Fahrbahn-Gefahrenbereichs auf diesen zubewegen, in einem Rasterformat mit schachbrettartig abwechselnden Formatfeldern digital repräsentiert werden.In addition, for the further development of the vehicle control system according to the invention (cf.
Bei dieser vorteilhaften, schachbrettartigen Repräsentation, was die Koordination bei der Fahrzeugsteuerung anbetrifft, repräsentieren ein Kernbereich des Rasterformats den Fahrbahn-Gefahrenbereich sowie erste Formatfelder des Rasterformats formatfeldwechselabhängig entweder "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen und zweite Formatfelder des Rasterformats formatfeldwechselabhängig entweder "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro erstem Formatfeld bzw. zweitem Formatfeld.In this advantageous, checkerboard-like representation, as far as coordination in vehicle control is concerned, a core area of the grid format represents the lane danger zone and first format fields of the grid format, depending on the format field change, either "WEST-> OST- and / or OST->WEST" vehicle movement directions or "NORD"-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions and second format fields of the raster format depending on the format field change either "NORTH-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions or "WEST-> EAST and / or EAST-> WEST "vehicle movement directions, each with at most one vehicle per first format field or second format field.
Für die auf der Basis des digitalen Fahrbahn-Gefahrenbereich-Zwillings durchgeführte Fahrzeugsteuerung wird jede Fahrzeugbewegung des Fahrzeugs zum Passieren des Fahrbahn-Gefahrenbereichs dadurch infolge der abgegebenen Fahrzeugverfügungsgewalten automatisch, dynamisch, fahrzeugkoordiniert und - kollisionsfrei gesteuert, dass korrespondierend zu der Situation im Fahrbahn-Gefahrenbereich
das Fahrzeug im Kernbereich des Rasterformats gemäß einer Digitalbewegung mit einem START-Punkt und einem ZIEL-Punkt in dem Rasterformat, die auf einem Formatfeldwechsel beruht, entweder
von einem ersten Formatfeld der ersten Formatfelder als den START-Punkt der Digitalbewegung auf ein benachbartes zweites Formatfeld der zweiten Formatfelder als den ZIEL-Punkt der Digitalbewegung, daß kein Fahrzeug der Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist,
oder
von einem zweiten Formatfeld der zweiten Formatfelder als den START-Punkt der Digitalbewegung auf ein benachbartes erstes Formatfeld der ersten Formatfelder als den ZIEL-Punkt der Digitalbewegung, daß kein Fahrzeug der Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist,
digital bewegt wird.For the vehicle control based on the digital lane-danger zone twin, each vehicle movement of the vehicle to pass the lane danger zone is controlled automatically, dynamically, vehicle-coordinated and - collision-free due to the given vehicle disposal powers - that corresponds to the situation in the lane-danger zone
the vehicle in the core area of the grid format according to a digital movement with a START point and a DESTINATION point in the grid format, which is based on a format field change, either
from a first format field of the first format fields as the START point of the digital movement to an adjacent second format field of the second format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement,
or
from a second format field of the second format fields as the START point of the digital movement to an adjacent first format field of the first format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement,
is moved digitally.
Wenn mit einer letzten Digitalbewegung in dem Rasterformat das Fahrzeug digital den Kernbereich des Rasterformats verlässt und es damit den Fahrbahn-Gefahrenbereich passiert hat, dann wird für die vorteilhafte Weiterbildung der erfindungsgemäßen Fahrzeugsteuerung (vgl. Ansprüche 5, 9 und 14), dass die Fahrzeugverfügungsgewalt jedem Fahrzeug von der zentralen Steuerungsinstanz zurückgegeben. Dies kann auf einfache und in vorteilhafter Weise mit Hilfe eines weiteren Handshake-Protokolls erreicht werden. Im Zuge dieses weiteren Handshake-Protokolls werden dem Fahrzeug dann die Rückgabe der Fahrzeugverfügungsgewalt initiierende, dritte Steuerungsdaten übermittelt.If, with a last digital movement in the grid format, the vehicle digitally leaves the core area of the grid format and thus has passed the lane danger area, then the advantageous further development of the vehicle control system according to the invention (cf. claims 5, 9 and 14) means that the vehicle power is available to everyone Vehicle returned from the central control instance. This can be achieved in a simple and advantageous manner with the aid of a further handshake protocol. In the course of this further handshake protocol, third control data initiating the return of the vehicle power is then transmitted to the vehicle.
Weitere Vorteile der Erfindung ergeben sich aus der nachfolgenden Beschreibung eines Ausführungsbeispieles der Erfindung ausgehend von der
-
FIGUR 2 auf der Basis von derFIGUR 1 ein Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr, -
FIGUR 3 den prinzipiellen Aufbau einer Steuereinrichtung in einer Steuerungseinheit des in derFIGUR 2 dargestellten Steuerungssystems zur Fahrzeugsteuerung durch Erzeugung eines Fahrbahn-Gefahrenbereich-Zwillings, -
FIGUR 4 eine durch den Fahrbahn-Gefahrenbereich-Zwilling, bei dessen Erzeugung in der Steuereinrichtung bzw. dem Computer-Programm-Produkt nachFIGUR 3 , geschaffene erste Digitale Repräsentation einer ersten Verkehrssituation mit einem durch zumindest teilautomatisierte, motorisierte Fahrzeuge vollständig befahrenen und belegten Fahrbahn-Gefahrenbereich in Gestalt einer "Doppel-T"-Kreuzung, -
FIGUR 5 eine durch den Fahrbahn-Gefahrenbereich-Zwilling, bei dessen Erzeugung in der Steuereinrichtung bzw. dem Computer-Programm-Produkt nachFIGUR 3 , geschaffene zweite Digitale Repräsentation einer zweiten Verkehrssituation mit einem durch zumindest teilautomatisierte, motorisierte Fahrzeuge vollständig befahrenen und belegten Fahrbahn-Gefahrenbereich in Gestalt einer "Doppel-T"-Kreuzung, -
FIGUR 6 eine durch den Fahrbahn-Gefahrenbereich-Zwilling, bei dessen Erzeugung in der Steuereinrichtung bzw. dem Computer-Programm-Produkt nachFIGUR 3 , geschaffene dritte Digitale Repräsentation einer dritten Verkehrssituation mit einem durch zumindest teilautomatisierte, motorisierte Fahrzeuge vollständig befahrenen und belegten Fahrbahn-Gefahrenbereich in Gestalt einer "Doppel-T"-Kreuzung. -
FIGUR 2 zeigt auf der Basis von derFIGUR 1 die zukünftige, gegenüber der heutigen Situation modifizierte Situation bei der Regelung eines Fahrbahnverkehrs, z.B. Straßenverkehrs, in den Fahrbahn-Gefahrenbereichen FGB in Gestalt einer "DoppelT"-Kreuzung KZ oder einer "T"-Kreuzung KZ'. Die Modifikation besteht darin, dass der Straßenverkehr in zumindest teilautomatisierte und motorisierte Verkehrsteilnehmer und solche, die nicht automatisiert sind und auch unter Umständen nicht motorisiert sind, unterteilt ist und die Regelung des Fahrbahn-/Straßenverkehrs in den Fahrbahn-Gefahrenbereichen bzw. Kreuzungen FGB, KZ, KZ' ohne jegliche Verkehrsregelungsmaßnahmen, wie z.B. Ampelanlagen, Verkehrsschilder, Zebrastreifen für Fußgänger, Überquerungsstreifen für Fußgänger/Fahrradfahrer, etc. auskommt. Um aber dennoch den Fahrbahn-/Straßenverkehr im Gefahren-/Kreuzungsbereich FGB, KZ, KZ' regeln zu können ist gemäß derFIGUR 2 zu diesem Zweck ein Steuerungssystem STGS vorhanden. In diesem Steuerungssystem STGS werden die nicht automatisierten und bedingt motorisierten Verkehrsteilnehmer, wie Fußgänger, Radfahrer, Elektro-Radfahrer, etc., in den Fahrbahn-Gefahrenbereichen FGB, KZ, KZ' zur Fahrbahnüberquerung ober- oder unterhalb der Fahrbahnen für die zumindest teilautomatisierten und motorisierten Verkehrsteilnehmer geführt.
-
FIGURE 2 based on theFIGURE 1 a control system for controlling at least partially automated vehicles in a lane danger area, in particular intersections of lanes in road traffic, -
FIGURE 3 the basic structure of a control device in a control unit of the inFIGURE 2 shown control system for vehicle control by generating a lane-danger zone twin, -
FIGURE 4 one by the lane-danger zone twin, when it is generated in the control device or the computer program productFIGURE 3 , created first digital representation of a first traffic situation with a roadway danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection, -
FIGURE 5 one by the lane-danger zone twin, when it is generated in the control device or the computer program productFIGURE 3 , created second digital representation of a second traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection, -
FIGURE 6 one by the lane-danger zone twin, when it is generated in the control device or the computer program productFIGURE 3 , created third digital representation of a third traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection. -
FIGURE 2 shows on the basis of theFIGURE 1 the future situation, modified from the current situation, in the regulation of a lane traffic, for example road traffic, in the FGB lane danger areas in the form of a "double T" intersection KZ or a "T" intersection KZ '. The modification consists of the fact that road traffic is divided into at least partially automated and motorized road users and those who are not automated and may not even be motorized, and the regulation of road / road traffic in the lane danger areas or intersections FGB, KZ 'KZ' manages without any traffic control measures, such as traffic lights, traffic signs, crosswalks for pedestrians, crossing strips for pedestrians / cyclists, etc. But around the road / road traffic to be able to regulate in the danger / intersection area FGB, KZ, KZ 'according to theFIGURE 2 a control system STGS is available for this purpose. In this control system STGS, non-automated and conditionally motorized road users, such as pedestrians, cyclists, electric cyclists, etc., are used in the FGB, KZ, KZ 'lane danger areas to cross the lane above or below the lanes for the at least partially automated and motorized ones Road users led.
Gemäß der
Darüber hinaus enthält das in der
Die zumindest teilautomatisierten, motorisierten Fahrzeuge FZ1...FZ36 verteilen sich in der dargestellten Weise auf die als "Doppel-T"-Kreuzung KZ und als "T"-Kreuzung KZ' ausgestalteten Fahrbahn-Gefahrenbereiche FGB. Für die Fahrzeugsteuerung zumindest teilautomatisierter, motorisierter Fahrzeuge im Fahrbahn-Gefahrenbereich kommen gemäß der Ausführungen im Zusammenhang mit der Beschreibung der
Die in der
Im Folgenden soll für die generelle Fahrzeugsteuerung zumindest teilautomatisierter, motorisierter Fahrzeuge in Fahrbahn-Gefahrenbereichen des Steuerungssystems STGS stellvertretend der als "Doppel-T"-Kreuzung KZ ausgestaltete Fahrbahn-Gefahrenbereich FGB näher betrachtet werden. Im Unterschied zu der "Doppel-T"-Kreuzung KZ* in der
Die zentralen Steuerungseinheit STGE weist für diese Fahrzeugsteuerung eine Steuereinrichtung STER und mindestens eine Kommunikationseinrichtung KOER auf, die kommunikationstechnisch entweder miteinander verbunden oder einander zugeordnet sind.For this vehicle control, the central control unit STGE has a control device STER and at least one communication device KOER, which are either connected to one another or assigned to one another in terms of communication technology.
Gemäß der "Oder"-Option ist die Steuereinrichtung STER vorzugsweise und in vorteilhafter Weise als eine offene Cloud Computing Plattform ausgebildet.According to the "or" option, the control device STER is preferably and advantageously designed as an open cloud computing platform.
Die Kommunikationseinrichtung KOER ist vorzugsweise eine für den Mobilfunkstandard der 5. Generation (5G) ausgelegte Funkkommunikationseinrichtung und ist in beiden Fällen ("Entweder"-Option und "Oder"-Option) in dem als "Doppel-T"-Kreuzung KZ ausgestaltete Fahrbahn-Gefahrenbereich FGB anzahlmäßig und anordnungstechnisch derart angeordnet, dass der Gefahren-/Kreuzungsbereich FGB, KZ funktechnisch optimal abgedeckt ist und zwar so, dass die sich in dem Gefahren-/Kreuzungsbereich FGB, KZ befindenden, zumindest teilautomatisierten, motorisierten Fahrzeuge jederzeit zur Fahrzeugsteuerung via Funk erreich- und ansprechbar sind. Für den dargestellten Gefahren-/Kreuzungsbereich FGB, KZ sind es beispielsweise vier einzelne Kommunikationseinrichtungen bzw. Funkkommunikationseinrichtungen KOER, die an allen vier Kreuzungsecken positioniert sind, um immer eine optimale Funkverbindung zu den Fahrzeugen im Gefahren-/Kreuzungsbereich FGB, KZ zu haben.The communication device KOER is preferably a radio communication device designed for the mobile radio standard of the 5th generation (5G) and is in both cases ("either" option and "or" option) in the lane designed as a "double-T" crossing KZ In terms of number and arrangement, the danger area FGB is arranged in such a way that the danger / intersection area FGB, KZ is optimally covered in terms of radio technology and in such a way that the at least partially automated, motorized vehicles located in the danger / intersection area FGB, KZ reach the vehicle control via radio at any time - and are responsive. For the illustrated danger / intersection area FGB, KZ there are, for example, four individual communication devices or radio communication devices KOER, which are positioned at all four intersection corners in order to always have an optimal radio connection to the vehicles in the danger / intersection area FGB, KZ.
Stellvertretend für alle Fahrzeuge FZi, die zur Fahrzeugsteuerung im Gefahren-/Kreuzungsbereich FGB erreich- und ansprechbar sein müssen, sollen im Weiteren für die Erläuterung der Fahrzeugsteuerung durch die zentrale Steuerungseinheit STGE Fahrzeuge FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 der zumindest teilautomatisierten, motorisierten Fahrzeuge FZ1...FZ36 betrachtet werden. Für die Erreich- und Ansprechbarkeit der betrachteten Fahrzeuge FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 weisen diese jeweils eine Fahrzeug-Kommunikationsschnittstelle FZKS auf, die vorzugsweise, wie die Funkkommunikationseinrichtung KOER, eine für den Mobilfunkstandard der 5. Generation (5G) ausgelegte Fahrzeug-Funkkommunikationsschnittstelle ist.Representative of all vehicles FZ i , which must be accessible and addressable for vehicle control in the danger / intersection area FGB, should furthermore be used for the explanation of vehicle control by the central control unit STGE vehicles FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 of the at least partially automated, motorized vehicles FZ 1 ... FZ 36 can be considered. For the accessibility and responsiveness of the considered vehicles FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 , they each have a vehicle communication interface FZKS, which, like the radio communication device KOER, preferably one for the 5th generation (5G) vehicle radio communication interface.
Jedes Fahrzeug FZi - im Allgemeinen - und die betrachteten Fahrzeuge FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 - im Besonderen - der zumindest teilautomatisierten, motorisierten Fahrzeuge FZ1...FZ36 gibt bzw. geben dann, wenn es bzw. sie sich dem Gefahren-/Kreuzungsbereich FGB, KZ zum Passieren des Fahrbahn-Gefahrenbereichs FGB bzw. der "Doppel-T"-Kreuzung KZ nähert bzw. nähern, eine Fahrzeugverfügungsgewalt zur Fahrzeugsteuerung von dynamischen Fahraufgaben in dem jeweiligen Fahrzeug ab.Each vehicle FZ i - in general - and the considered vehicles FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 - in particular - of the at least partially automated, motorized vehicles FZ 1 ... FZ 36 exist if they approach or approach the danger / intersection area FGB, KZ for passing through the carriageway danger area FGB or the "double-T" intersection KZ, a vehicle availability force for vehicle control of dynamic driving tasks in the respective vehicle.
Durch das temporäre Abgeben der Fahrzeugverfügungsgewalt zum Passieren des Fahrbahn-Gefahrenbereichs FGB bzw. der "DoppelT"-Kreuzung KZ tritt das besagte Fahrzeug die Steuerungshoheit in Bezug auf das Überqueren des Gefahren-/Kreuzungsbereichs FGB, KZ an eine externe zentrale Steuerungsinstanz, hier die zentrale Steuerungseinheit STGE, ab. Je nach Autonomielevel fürs Autonome Fahren bedeutet dies, dass der Fahrer des die Steuerungshoheit abtretenden Fahrzeugs keine Macht und Kontrolle mehr über sein Fahrzeug KZ hat und er bestenfalls nur noch Erfüllungsgehilfe ist, was die Fahrzeugsteuerung der dynamischen Fahraufgaben im Fahrzeug zum Überqueren des Gefahren-/Kreuzungsbereichs FGB, KZ anbetrifft.By temporarily relinquishing the vehicle power to pass through the FGB lane danger zone or the "DoppelT" intersection KZ, said vehicle has control over the crossing of the danger / intersection zone FGB, KZ to an external central control entity, here the central one Control unit STGE, from. Depending on the level of autonomy for autonomous driving, this means that the driver of the vehicle relinquishing control has no more power and control over his vehicle concentration camp and, at best, he is only a vicarious agent, which is the vehicle control of the dynamic driving tasks in the vehicle to cross the danger / intersection area FGB, KZ applies.
Mit dem Ausdruck "sich nähern" ist gemeint, dass das Fahrzeug rechtzeitig vor dem Eintritt des Fahrzeugs in den Gefahren-/Kreuzungsbereich FGB, KZ die Fahrzeugverfügungsgewalt abgegeben haben muss, weil ansonsten eine kollisionsfreie Fahrzeugsteuerung in dem Gefahren-/Kreuzungsbereich FGB, KZ nicht sichergestellt werden kann. Um die Pufferzone für das Abgeben der Fahrzeugverfügungsgewalt zu erweitern, ist es vorteilhaft, wenn bereits im Vorfeld des Sich-Näherns das Abgeben der Fahrzeugverfügungsgewalt mittels eines Handshake-Protokolls zwischen jedem Fahrzeug FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 und der zentralen Steuerungsinstanz bzw. der Steuerungseinheit STGE vereinbart wird. Diese "Handshake-Protokoll"-mäßige Vereinbarung erfolgt kommunikationstechnisch einerseits über die Funkverbindung zwischen der Fahrzeug-Kommunikationsschnittstelle bzw. Fahrzeug-Funkkommunikationsschnittstelle FZKS und der Kommunikationseinrichtung bzw. Funkkommunikationseinrichtung KOER und andererseits zwischen der Kommunikationseinrichtung KOER und der Steuereinrichtung STER.The expression "approaching" means that the vehicle must have given the vehicle power in good time before the vehicle enters the danger / intersection area FGB, KZ, because otherwise collision-free vehicle control in the danger / intersection area FGB, KZ is not ensured can be. In order to expand the buffer zone for relinquishing vehicle power, it is advantageous if, prior to approaching, relinquishment of vehicle power using a handshake protocol between each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 and the central control entity or the control unit STGE is agreed. This "handshake protocol" agreement is made on the one hand in terms of communication technology via the radio connection between the vehicle communication interface or vehicle radio communication interface FZKS and the communication device or radio communication device KOER and on the other hand between the communication device KOER and the control device STER.
Die Fahrzeugverfügungsgewalt wird dabei jeweils bevorzugt mit Hilfe von ersten Steuerungsdaten STGD1 abgegeben, die jedes Fahrzeug FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 beim Sich-Nähern des Gefahren-/Kreuzungsbereichs FGB, KZ oder im Vorfeld des Sich-Näherns kommunikationstechnisch, über den vorstehend aufgezeigten Übertragungsweg der Steuereinrichtung STER in der zentralen Steuerungseinheit STGE übermittelt. Diese ersten Steuerungsdaten STGD1 werden, wenn bereits im Vorfeld des Sich-Näherns das Abgeben der Fahrzeugverfügungsgewalt vereinbart wird, im Zuge des Handshake-Protokolls der Steuereinrichtung STER in der zentralen Steuerungseinheit STGE übermittelt.The vehicle availability is preferably given with the aid of first control data STGD 1 , which each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as the danger / intersection area approaches FGB, KZ or in the run-up to communication technology, via the transmission path shown above to the control device STER in the central control unit STGE. These first control data STGD 1 are transmitted in the course of the handshake protocol to the control device STER in the central control unit STGE if the handover of the vehicle is already agreed in advance of the approach.
Mit der Abgabe der Fahrzeugverfügungsgewalten durch die Fahrzeuge FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 gelangen die dazu korrespondierenden, von den Fahrzeugen FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 generierten und der Steuereinrichtung STER übermittelten ersten Steuerungsdaten STGD1 über die Kommunikationseinrichtung KOER und die Steuerschnittstelle STSS in den Prozessor PZ. Der Prozessor PZ erzeugt daraufhin mit dem Erhalt der ersten Steuerungsdaten STGD1 und der Abgabe der Fahrzeugverfügungsgewalten durch die Fahrzeuge FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 den digitalen Fahrbahn-Gefahrenbereich-Zwilling FGBZ, mittels dem infolge der abgegebenen Fahrzeugverfügungsgewalten Fahrzeugbewegungen der Fahrzeuge FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 zum Passieren des Fahrbahn-Gefahrenbereichs FGB bzw. der "Doppel-T"-Kreuzung KZ automatisch, dynamisch, fahrzeugkoordiniert und - kollisionsfrei gesteuert werden.When vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 surrender vehicle powers, the corresponding vehicles FZ i , FZ 2 , FZ 11 , FZ 14 arrive , FZ 15 , FZ 18 , FZ 22 , FZ 31 generated and transmitted to the control device STER first control data STGD 1 via the Communication device KOER and the control interface STSS in the processor PZ. The processor PZ then generates the digital lane danger area with the receipt of the first control data STGD 1 and the delivery of the vehicle availability powers by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31. Twin FGBZ, by means of the vehicle movements of vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the given vehicle disposition powers to pass the road hazard area FGB or the "double T" -Crossing KZ can be controlled automatically, dynamically, vehicle-coordinated and - collision-free.
Zu diesem Zweck generiert der Prozessor PZ auf der Basis des erzeugten digitalen Fahrbahn-Gefahrenbereich-Zwilling FGBZ zweite Steuerungsdaten STGD2, die über die Steuerschnittstelle STSS in die Kommunikationseinrichtung KOER bzw. die Funkkommunikationseinrichtung KOER gelangen und von dort gemäß der Darstellung in der
Für die Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings FGBZ zur Fahrzeugsteuerung werden von dem Prozessor PZ bei der Ausführung des Programm-Modul PGM von jedem Fahrzeug FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 infolge der von den Fahrzeugen FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 abgegebenen Fahrzeugverfügungsgewalten und unter Nutzung des Kommunikationspfads zwischen diesen Fahrzeugen und der Steuereinrichtung STER bzw. dem Computer-Programm-Produkt CPP Fahrzeugtrajektorie und Fahrzeuggeschwindigkeit ermittelt.For the generation of the digital lane-danger zone twin FGBZ for vehicle control, the processor PZ executes the program module PGM for each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the vehicle disposal powers given by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 and using the communication path between these vehicles and the control device STER or the computer program -Product CPP vehicle trajectory and vehicle speed determined.
Mit Hilfe des erzeugten, digitalen Fahrbahn-Gefahrenbereich-Zwillings FGBZ zur Fahrzeugsteuerung wird von dem Prozessor PZ bei der Ausführung des Programm-Modul PGM ermittelt, welche Fahrzeuge den Fahrbahn-Gefahrenbereich FGB bzw. die "Doppel-T"-Kreuzung KZ passiert haben. Gemäß der Darstellung in der
Wie nun mit Hilfe des erzeugten, digitalen Fahrbahn-Gefahrenbereich-Zwillings FGBZ zur Fahrzeugsteuerung zunächst die Fahrzeugbewegungen der Fahrzeuge FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31 zum Passieren des Fahrbahn-Gefahrenbereichs FGB bzw. der "Doppel-T"-Kreuzung KZ automatisch, dynamisch, fahrzeugkoordiniert und -kollisionsfrei gesteuert werden und dann im Weiteren erkannt und ermittelt wird, wann ein Fahrzeug den Fahrbahn-Gefahrenbereich FGB bzw. die "Doppel-T"-Kreuzung KZ passiert hat, wird im Folgenden anhand von
Die erste Verkehrssituation hat dabei nichts mit der Verkehrssituation in dem in der
Die erste Digitale Repräsentation DRP1 ist ein Rasterformat RF mit schachbrettartig abwechselnden Formatfeldern FF1, FF2, bei der
- ein Kernbereich KB des Rasterformats RF die "Doppel-T"-Kreuzung repräsentiert,
- erste Formatfelder FF1 des Rasterformats RF formatfeldwechselabhängig entweder
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro erstem Formatfeld FF1 repräsentieren und - zweite Formatfelder FF2 des Rasterformats RF formatfeldwechselabhängig entweder
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro zweitem Formatfeld FF2 repräsentieren.
- a core area KB of the raster format RF represents the "double-T" crossing,
- first format fields FF1 of the raster format RF either depending on the format field change
"WEST-> EAST and / or EAST->WEST" vehicle movement directions or
Represent "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions, each with a maximum of one vehicle per first format field FF1 and - second format fields FF2 of the raster format RF either depending on the format field change
"NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
Represent "WEST-> OST- and / or OST->WEST" vehicle movement directions, each with at most one vehicle per second format field FF2.
In dem Rasterformat RF mit den schachbrettartig abwechselnden Formatfeldern FF1, FF2 werden Fahrzeugfahrtinformationen zur ersten Verkehrssituation, aus und in welche Fahrtrichtungen sich die Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung auf diese zubewegen digital repräsentiert.In the raster format RF with the checkerboard-like alternating format fields FF1, FF2, vehicle travel information relating to the first traffic situation, and in which directions of travel the vehicles for passing the "double-T" intersection are digitally represented.
Gemäß der in der
Bezogen auf den "Doppel-T"-Kreuzungsverkehr in der
Das Abbiegen von Fahrzeugen sind Sonderfälle bezüglich der besagten Fahrzeugsteuerung im Gefahren-/Kreuzungsbereich, die in der Parallel-Patentanmeldung (Anmeldung-Nr......) mit der Bezeichnung "Verfahren, Computer-Programm-Produkt, Zentrale Steuerungseinheit und Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge, anteilig mit Fahrbahnwechselabsichten, in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr", behandelt werden.The turning of vehicles are special cases with regard to the said vehicle control in the danger / intersection area, which are described in the parallel patent application (application no. ......) with the designation "Procedure, computer program product, central control unit and control system for Control of at least partially automated vehicles, partly with intent to change lanes, in a lane danger zone, in particular intersections of lanes in road traffic ".
Die Formatfelder FF1, FF2 des Rasterformats RF der ersten Digitalen Repräsentation DRP1 sind so gewählt, dass Fahrzeuge mit normaler, üblicher und definierter Fahrzeuglänge im Ruhe- und Bewegungszustand ohne sich gegenseitige zu berühren in den Feldern digital repräsentiert werden.The format fields FF1, FF2 of the raster format RF of the first digital representation DRP1 are selected such that vehicles with normal, normal and defined vehicle length are represented digitally in the fields at rest and in motion without touching one another.
Fahrzeuge, die diese normale, übliche und definierte Fahrzeuglänge überschreiten, also größer sind, stellen weitere Sonderfälle bezüglich der besagten Fahrzeugsteuerung Gefahren-/Kreuzungsbereich dar. Diese Sonderfälle werden in der Parallel-Patentanmeldung (Anmeldung-Nr......) mit der Bezeichnung "Verfahren, Computer-Programm-Produkt, Zentrale Steuerungseinheit und Steuerungssystem zum Steuern zumindest teilautomatisierter Fahrzeuge, anteilig mit Fahrzeugüberlängen, in einem Fahrbahn-Gefahrenbereich, insbesondere Kreuzungen von Fahrbahnen im Straßenverkehr", behandelt.Vehicles that exceed this normal, customary and defined vehicle length, i.e. larger, represent further special cases with regard to the said vehicle control danger / intersection area. These special cases are described in the parallel patent application (application no. ......) with the The term "method, computer program product, central control unit and control system for controlling at least partially automated vehicles, partly with excess vehicle length, in a lane danger zone, in particular intersections of lanes in road traffic", is treated.
Die erste Verkehrssituation gemäß der
Zur Fahrzeugsteuerung in dem "Doppel-T"-Kreuzungsverkehr wird jede Fahrzeugbewegung der 36 Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung automatisch, dynamisch, fahrzeugkoordiniert und -kollisionsfrei gesteuert, indem dazu korrespondierend
jedes Fahrzeug der 36 Fahrzeuge in dem Kernbereich KB des Rasterformats RF gemäß einer Digitalbewegung mit einem START-Punkt und einem ZIEL-Punkt in dem Rasterformat RF, die auf einem Formatfeldwechsel beruht, entweder
von einem ersten Formatfeld der ersten Formatfelder FF1 als den START-Punkt der Digitalbewegung auf ein benachbartes zweites Formatfeld der zweiten Formatfelder FF2 als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der 36 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist, oder
von einem zweiten Formatfeld der zweiten Formatfelder FF2 als den START-Punkt der Digitalbewegung auf ein benachbartes erstes Formatfeld der ersten Formatfelder FF1 als den ZIEL-Punkt der Digitalbewegung, daß kein Fahrzeug der 36 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist, digital bewegt wird.For vehicle control in the "double-T" intersection traffic, each vehicle movement of the 36 vehicles to pass the "double-T" intersection is controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly
each vehicle of the 36 vehicles in the core area KB of the raster format RF according to a digital movement with a START point and a DEST point in the raster format RF, which is based on a format field change, either
from a first format field of the first format fields FF1 as the START point of the digital movement to an adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - i.e. is digitally free for the digital movement, or
from a second format field of the second format fields FF2 as the START point of the digital movement to an adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement that no vehicle represents the 36 vehicles - i.e. is digitally free for the digital movement becomes.
Es findet also in Bezug auf die 36 Fahrzeuge in dem Kernbereich KB eine endliche Kettenreaktion von aufeinanderfolgenden Digitalbewegungen statt, die ihren Beginn, z.B. auf der Basis der
In diesem Zustand, wenn mit einer letzten Digitalbewegung in dem Rasterformat RF die 36 Fahrzeuge digital den Kernbereich KB des Rasterformats RF verlassen haben und damit die "Doppel-T"-Kreuzung passiert haben, wird jedem Fahrzeug die Fahrzeugverfügungsgewalt zurückgegeben, indem gemäß der
Dies kann gemäß der Beschreibung zur
Auch die zweite Verkehrssituation hat nichts mit der Verkehrssituation in dem in der
Die zweite Digitale Repräsentation DRP2 weist auch wieder das Rasterformat RF mit den schachbrettartig abwechselnden Formatfeldern FF1, FF2, bei der
- der Kernbereich KB des Rasterformats RF die "Doppel-T"-Kreuzung repräsentiert,
- die ersten Formatfelder FF1 des Rasterformats RF formatfeldwechselabhängig entweder
die "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
die "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils wieder höchstens einem Fahrzeug pro erstem Formatfeld FF1 repräsentieren und - die zweiten Formatfelder FF2 des Rasterformats RF formatfeldwechselabhängig entweder
die "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
die "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils wieder höchstens einem Fahrzeug pro zweitem Formatfeld FF2 repräsentieren.
- the core area KB of the raster format RF represents the "double T" crossing,
- the first format fields FF1 of the raster format RF either depending on the format field change
the "WEST-> EAST and / or OST->WEST" vehicle movement directions or
represent the "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions, each with a maximum of one vehicle per first format field FF1 and - the second format fields FF2 of the raster format RF either depending on the format field change
the "NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
represent the "WEST-> EAST and / or OST->WEST" vehicle movement directions, each with a maximum of one vehicle per second format field FF2.
In dem Rasterformat RF mit den schachbrettartig abwechselnden Formatfeldern FF1, FF2 werden Fahrzeugfahrtinformationen zur zweiten Verkehrssituation, aus und in welche Fahrtrichtungen sich die Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung auf diese zubewegen digital repräsentiert.In the raster format RF with the checkerboard-like alternating format fields FF1, FF2, vehicle travel information relating to the second traffic situation, and in which directions of travel the vehicles for moving towards the "double-T" intersection are represented digitally.
Gemäß der in der
Im Unterschied zu der ersten Verkehrssituation in der
Zur Fahrzeugsteuerung in dem "Doppel-T"-Kreuzungsverkehr wird wieder jede Fahrzeugbewegung der 36 Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung automatisch, dynamisch, fahrzeugkoordiniert und -kollisionsfrei gesteuert, indem dazu korrespondierend
jedes Fahrzeug der 36 Fahrzeuge in dem Kernbereich KB des Rasterformats RF gemäß der Digitalbewegung mit dem START-Punkt und dem ZIEL-Punkt in dem Rasterformat RF, die auf dem Formatfeldwechsel beruht, entweder
von dem ersten Formatfeld der ersten Formatfelder FF1 als den START-Punkt der Digitalbewegung auf das benachbarte zweite Formatfeld der zweiten Formatfelder FF2 als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der 36 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist, oder
von dem zweiten Formatfeld der zweiten Formatfelder FF2 als den START-Punkt der Digitalbewegung auf das benachbarte erste Formatfeld der ersten Formatfelder FF1 als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der 36 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist,
digital bewegt wird.For vehicle control in the "double-T" intersection traffic, each vehicle movement of the 36 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly
each vehicle of the 36 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either
from the first format field of the first format fields FF1 as the START point of the digital movement to the adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent any of the 36 vehicles - is digitally free for digital movement, or
from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - that is, digitally free for the digital movement,
is moved digitally.
Es findet also in Bezug auf die 36 Fahrzeuge in dem Kernbereich KB wieder die endliche Kettenreaktion von aufeinanderfolgenden Digitalbewegungen statt, die ihren Beginn, z.B. auf der Basis der
In diesem Zustand, wenn mit einer letzten Digitalbewegung in dem Rasterformat RF die 36 Fahrzeuge digital den Kernbereich KB des Rasterformats RF verlassen haben und damit die "Doppel-T"-Kreuzung passiert haben, wird wieder jedem Fahrzeug die Fahrzeugverfügungsgewalt zurückgegeben, indem gemäß der
Dies kann gemäß der Beschreibung zur
Auch die dritte Verkehrssituation hat - wie die erste und zweite Verkehrssituation - nichts mit der Verkehrssituation in dem in der
Die dritte Digitale Repräsentation DRP3 weist auch wieder das Rasterformat RF mit den schachbrettartig abwechselnden Formatfeldern FF1, FF2 auf, bei der
- der Kernbereich KB des Rasterformats RF die "Doppel-T"-Kreuzung repräsentiert,
- die ersten Formatfelder FF1 des Rasterformats RF formatfeldwechselabhängig entweder
die "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
die "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils wieder höchstens einem Fahrzeug pro erstem Formatfeld FF1 repräsentieren und - die zweiten Formatfelder FF2 des Rasterformats RF formatfeldwechselabhängig entweder
die "NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
die "WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils wieder höchstens einem Fahrzeug pro zweitem Formatfeld FF2 repräsentieren.
- the core area KB of the raster format RF represents the "double T" crossing,
- the first format fields FF1 of the raster format RF either depending on the format field change
the "WEST-> EAST and / or OST->WEST" vehicle movement directions or
represent the "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions, each with a maximum of one vehicle per first format field FF1 and - the second format fields FF2 of the raster format RF either depending on the format field change
the "NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
represent the "WEST-> EAST and / or OST->WEST" vehicle movement directions, each with a maximum of one vehicle per second format field FF2.
In dem Rasterformat RF mit den schachbrettartig abwechselnden Formatfeldern FF1, FF2 werden Fahrzeugfahrtinformationen zur zweiten Verkehrssituation, aus und in welche Fahrtrichtungen sich die Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung auf diese zubewegen digital repräsentiert.In the raster format RF with the checkerboard-like alternating format fields FF1, FF2, vehicle travel information relating to the second traffic situation, and in which directions of travel the vehicles for moving towards the "double-T" intersection are represented digitally.
Gemäß der in der
Im Unterschied zu der zweiten Verkehrssituation in der
Ein weiterer Unterschied zu der zweiten Verkehrssituation mit der zweiten Digitalen Repräsentation DRP2 in der
Zur Fahrzeugsteuerung in dem "Doppel-T"-Kreuzungsverkehr wird wieder jede Fahrzeugbewegung der 30 Fahrzeuge zum Passieren der "Doppel-T"-Kreuzung automatisch, dynamisch, fahrzeugkoordiniert und -kollisionsfrei gesteuert, indem dazu korrespondierend wieder
jedes Fahrzeug der 30 Fahrzeuge in dem Kernbereich KB des Rasterformats RF gemäß der Digitalbewegung mit dem START-Punkt und dem ZIEL-Punkt in dem Rasterformat RF, die auf dem Formatfeldwechsel beruht, entweder
von dem ersten Formatfeld der ersten Formatfelder FF1 als den START-Punkt der Digitalbewegung auf das benachbarte zweite Formatfeld der zweiten Formatfelder FF2 als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der 30 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist, oder
von dem zweiten Formatfeld der zweiten Formatfelder FF2 als den START-Punkt der Digitalbewegung auf das benachbarte erste Formatfeld der ersten Formatfelder FF1 als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der 30 Fahrzeuge repräsentiert - also digital frei für die Digitalbewegung ist, digital bewegt wird.For vehicle control in the "double-T" intersection traffic, each vehicle movement of the 30 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly again
each vehicle of the 30 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either
from the first format field of the first format fields FF1 as the START point of the digital movement to the neighboring second Format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - that is, digitally free for the digital movement, or
from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - i.e. is digitally free for the digital movement becomes.
Es findet also in Bezug auf die 30 Fahrzeuge in dem Kernbereich KB wieder die endliche Kettenreaktion von aufeinanderfolgenden Digitalbewegungen statt, die ihren Beginn, z.B. auf der Basis der
In diesem Zustand, wenn mit einer letzten Digitalbewegung in dem Rasterformat RF die 30 Fahrzeuge digital den Kernbereich KB des Rasterformats RF verlassen haben und damit die "Doppel-T"-Kreuzung passiert haben, wird wieder jedem Fahrzeug die Fahrzeugverfügungsgewalt zurückgegeben, indem gemäß der
Dies kann gemäß der Beschreibung zur
Claims (16)
dadurch gekennzeichnet, dass
characterized in that
im Vorfeld des Sich-Näherns des Fahrbahn-Gefahrenbereichs (FGB, KZ, KZ') das Abgeben der Fahrzeugverfügungsgewalt mittels eines Handshake-Protokolls zwischen jedem Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) und der zentralen Steuerungsinstanz (STGE, STER, CPP, PZ, SP, PGM) vereinbart wird.A method according to claim 1, characterized in that
in the run-up to the approach of the lane danger zone (FGB, KZ, KZ ') the handing over of the vehicle power by means of a handshake protocol between each vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) and the central control body (STGE, STER, CPP, PZ, SP, PGM) is agreed.
für die Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings (FGBZ) zur Fahrzeugsteuerung infolge der abgegebenen Fahrzeugverfügungsgewalten von jedem Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) Fahrzeugtrajektorie und Fahrzeuggeschwindigkeit ermittelt werden.A method according to claim 1 or 2, characterized in that
for the generation of the digital lane-danger zone twin (FGBZ) for vehicle control as a result of the given vehicle availability powers of each vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) vehicle trajectory and vehicle speed be determined.
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro erstem Formatfeld (FF1) repräsentieren und
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro zweitem Formatfeld (FF2) repräsentieren; und
das Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) im Kernbereich (KB) des Rasterformats (RF) gemäß einer Digitalbewegung mit einem START-Punkt und einem ZIEL-Punkt in dem Rasterformat (RF), die auf einem Formatfeldwechsel beruht, entweder
von einem ersten Formatfeld der ersten Formatfelder (FF1) als den START-Punkt der Digitalbewegung auf ein benachbartes zweites Formatfeld der zweiten Formatfelder (FF2) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist, oder
von einem zweiten Formatfeld der zweiten Formatfelder (FF2) als den START-Punkt der Digitalbewegung auf ein benachbartes erstes Formatfeld der ersten Formatfelder (FF1) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist,
digital bewegt wird.
"WEST-> EAST and / or EAST->WEST" vehicle movement directions or
Represent "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions with at most one vehicle per first format field (FF1) and
"NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
Represent "WEST-> OST- and / or OST->WEST" vehicle movement directions, each with at most one vehicle per second format field (FF2); and
the vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) in the core area (KB) of the grid format (RF) according to a digital movement with a START point and a DESTINATION point in the raster format (RF), which is based on a format field change, either
from a first format field of the first format fields (FF1) as the START point of the digital movement to an adjacent second format field of the second format fields (FF2) as that TARGET point of the digital movement, which does not represent a vehicle of the vehicles (FZ 1 ... FZ n ) - i.e. digitally free for the digital movement, or
from a second format field of the second format fields (FF2) as the START point of the digital movement to an adjacent first format field of the first format fields (FF1) as the TARGET point of the digital movement, which is not a vehicle of the vehicles (FZ 1 ... FZ n ) represents - i.e. digitally free for digital movement,
is moved digitally.
die Fahrzeugverfügungsgewalt jedem Fahrzeug (FZi, FZ3, FZ16) von der zentralen Steuerungsinstanz (STGE, STER, CPP, PZ, SP, PGM), insbesondere mittels eines weiteren Handshake-Protokolls, zurückgegeben wird, wenn mit einer letzten Digitalbewegung in dem Rasterformat (RF) das Fahrzeug (FZi, FZ3, FZ16) digital den Kernbereich (KB) des Rasterformats (RF) verlässt und es damit den Fahrbahn-Gefahrenbereich (FGB, KZ, KZ') passiert hat.A method according to claim 4, characterized in that
the vehicle power is returned to each vehicle (FZ i , FZ 3 , FZ 16 ) by the central control unit (STGE, STER, CPP, PZ, SP, PGM), in particular by means of another handshake protocol, if with a last digital movement in the Grid format (RF) the vehicle (FZ i , FZ 3 , FZ 16 ) digitally leaves the core area (KB) of the grid format (RF) and has thus passed the road danger area (FGB, KZ, KZ ').
dadurch gekennzeichnet, dass
der Prozessor (PZ)
characterized in that
the processor (PZ)
der Prozessor (PZ) und das Programm-Modul (PGM) derart ausgebildet sind, dass für die Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings (FGBZ) zur Fahrzeugsteuerung infolge der abgegebenen Fahrzeugverfügungsgewalten von jedem Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) Fahrzeugtrajektorie und Fahrzeuggeschwindigkeit ermittelt werden.Computer program product (CPP) according to claim 6, characterized in that
the processor (PZ) and the program module (PGM) are designed in such a way that for the generation of the digital lane-danger zone twin (FGBZ) for vehicle control as a result of the given vehicle availability powers of each vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) vehicle trajectory and vehicle speed can be determined.
der Prozessor (PZ) und das Programm-Modul (PGM) derart ausgebildet sind, dass
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro erstem Formatfeld (FF1) repräsentieren und
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro zweitem Formatfeld (FF2) repräsentieren; und
das Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) im Kernbereich (KB) des Rasterformats (RF) gemäß einer Digitalbewegung mit einem START-Punkt und einem ZIEL-Punkt in dem Rasterformat (RF), die auf einem Formatfeldwechsel beruht, entweder
von einem ersten Formatfeld der ersten Formatfelder (FF1) als den START-Punkt der Digitalbewegung auf ein benachbartes zweites Formatfeld der zweiten Formatfelder (FF2) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist, oder
von einem zweiten Formatfeld der zweiten Formatfelder (FF2) als den START-Punkt der Digitalbewegung auf ein benachbartes erstes Formatfeld der ersten Formatfelder (FF1) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist,
digital bewegt wird.
the processor (PZ) and the program module (PGM) are designed such that
"WEST-> EAST and / or EAST->WEST" vehicle movement directions or
Represent "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions with at most one vehicle per first format field (FF1) and
"NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
Represent "WEST-> OST- and / or OST->WEST" vehicle movement directions, each with at most one vehicle per second format field (FF2); and
the vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) in the core area (KB) of the grid format (RF) according to a digital movement with a START point and a DESTINATION point in the raster format (RF), which is based on a format field change, either
from a first format field of the first format fields (FF1) as the START point of the digital movement to an adjacent second format field of the second format fields (FF2) as the TARGET point of the digital movement, which is not a vehicle of the vehicles (FZ 1 ... FZ n ) represents - i.e. digitally free for digital movement, or
from a second format field of the second format fields (FF2) as the START point of the digital movement to an adjacent first format field of the first format fields (FF1) as the TARGET point of the digital movement, which is not a vehicle of the vehicles (FZ 1 ... FZ n ) represents - i.e. digitally free for digital movement,
is moved digitally.
der Prozessor (PZ) und das Programm-Modul (PGM) derart ausgebildet sind, dass die Fahrzeugverfügungsgewalt jedem Fahrzeug (FZi, FZ3, FZ16) durch dritte Steuerungsdaten (STGD3) zurückgegeben wird, wenn mit einer letzten Digitalbewegung in dem Rasterformat (RF) das Fahrzeug (FZi, FZ3, FZ16) digital den Kernbereich (KB) des Rasterformats (RF) verlässt und es damit den Fahrbahn-Gefahrenbereich (FGB, KZ, KZ') passiert hat.Computer program product (CPP) according to claim 8, characterized in that
the processor (PZ) and the program module (PGM) are designed in such a way that the vehicle power is available to every vehicle (FZ i , FZ 3 , FZ 16 ) is returned by third control data (STGD 3 ) if, with a last digital movement in the raster format (RF), the vehicle (FZ i , FZ 3 , FZ 16 ) digitally defines the core area (KB) of the Grid format (RF) leaves and it has passed the lane danger zone (FGB, KZ, KZ ').
gekennzeichnet durch
marked by
die Steuereinrichtung (STER) und die Kommunikationseinrichtung (KOER) derart zusammenwirken und ausgebildet sind, dass im Vorfeld, wenn sich jedes Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) dem Fahrbahn-Gefahrenbereich (FGB, KZ, KZ') nähert, mittels eines Handshake-Protokolls zwischen dem jeweiligen Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) und der Steuereinrichtung (STER) via der Kommunikationseinrichtung (KOER) das Abgeben der Fahrzeugverfügungsgewalt und das Senden der Nachricht zum Abgeben der Fahrzeugverfügungsgewalt vereinbart wird.Central control unit (STGE) according to claim 10, characterized in that
the control device (STER) and the communication device (KOER) interact and are designed in such a way that in advance if each vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) approaches the lane danger zone (FGB, KZ, KZ '), using a handshake protocol between the respective vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) and the Control device (STER) via the communication device (KOER) the surrender of the vehicle power and the sending of the message to surrender the vehicle power is agreed.
die Steuereinrichtung (STER) und die Kommunikationseinrichtung (KOER) derart zusammenwirken und ausgebildet sind, dass die Steuereinrichtung (STER) für die Erzeugung des digitalen Fahrbahn-Gefahrenbereich-Zwillings (FGBZ) zur Fahrzeugsteuerung infolge der Fahrzeugverfügungsgewalten via der Kommunikationseinrichtung (KOER) von jedem Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) Fahrzeugtrajektorie und Fahrzeuggeschwindigkeit ermittelt.Central control unit (STGE) according to claim 10 or 11, characterized in that
the control device (STER) and the communication device (KOER) cooperate and are designed such that the control device (STER) for the generation of the digital lane-danger zone twin (FGBZ) for vehicle control as a result of the vehicle availability via the communication device (KOER) of each vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) Vehicle trajectory and vehicle speed determined.
die Steuereinrichtung (STER) und die Kommunikationseinrichtung (KOER) derart zusammenwirken und ausgebildet sind, dass die Steuereinrichtung (STER)
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen oder
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro erstem Formatfeld (FF1) repräsentieren und
"NORD->SÜD- und/oder SÜD->NORD"-Fahrzeugbewegungsrichtungen oder
"WEST->OST- und/oder OST->WEST"-Fahrzeugbewegungsrichtungen mit jeweils höchstens einem Fahrzeug pro zweitem Formatfeld (FF2) repräsentieren; und
das Fahrzeug (FZi, FZ2, FZ11, FZ14, FZ15, FZ18, FZ22, FZ31) im Kernbereich (KB) des Rasterformats (RF) gemäß einer Digitalbewegung mit einem START-Punkt und einem ZIEL-Punkt in dem Rasterformat (RF), die auf einem Formatfeldwechsel beruht, entweder
von einem ersten Formatfeld der ersten Formatfelder (FF1) als den START-Punkt der Digitalbewegung auf ein benachbartes zweites Formatfeld der zweiten Formatfelder (FF2) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist, oder
von einem zweiten Formatfeld der zweiten Formatfelder (FF2) als den START-Punkt der Digitalbewegung auf ein benachbartes erstes Formatfeld der ersten Formatfelder (FF1) als den ZIEL-Punkt der Digitalbewegung, das kein Fahrzeug der Fahrzeuge (FZ1...FZn) repräsentiert - also digital frei für die Digitalbewegung ist,
digital bewegt wird.
the control device (STER) and the communication device (KOER) interact and are designed such that the control device (STER)
"WEST-> EAST and / or EAST->WEST" vehicle movement directions or
Represent "NORD-> SOUTH and / or SOUTH->NORTH" vehicle movement directions with at most one vehicle per first format field (FF1) and
"NORTH-> SOUTH and / or SOUTH->NORTH" vehicle movement directions or
Represent "WEST-> OST- and / or OST->WEST" vehicle movement directions, each with at most one vehicle per second format field (FF2); and
the vehicle (FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 ) in the core area (KB) of the grid format (RF) according to a digital movement with a START point and a DESTINATION point in the raster format (RF), which is based on a format field change, either
from a first format field of the first format fields (FF1) as the START point of the digital movement to an adjacent second format field of the second format fields (FF2) as the TARGET point of the digital movement, which is not a vehicle of the vehicles (FZ 1 ... FZ n ) represents - i.e. is digitally free for the digital movement, or
from a second format field of the second format fields (FF2) as the START point of the digital movement to an adjacent first format field of the first format fields (FF1) as the TARGET point of the digital movement, which is not a vehicle of the vehicles (FZ 1 ... FZ n ) represents - i.e. digitally free for digital movement,
is moved digitally.
die Steuereinrichtung (STER) und die Kommunikationseinrichtung (KOER) derart zusammenwirken und ausgebildet sind, dass die Steuereinrichtung (STER) via der Kommunikationseinrichtung (KOER) durch dritte Steuerungsdaten (STGD3) die Fahrzeugverfügungsgewalt jedem Fahrzeug (FZi, FZ3, FZ16), insbesondere mittels eines weiteren Handshake-Protokolls, zurückgibt, wenn mit einer letzten Digitalbewegung in dem Rasterformat (RF) das Fahrzeug (FZi, FZ3, FZ16) digital den Kernbereich (KB) des Rasterformats (RF) verlässt und es damit den Fahrbahn-Gefahrenbereich (FGB, KZ, KZ') passiert hat.Central control unit (STGE) according to claim 13, characterized in that
the control device (STER) and the communication device (KOER) interact and are designed in such a way that the control device (STER) via the communication device (KOER) through third control data (STGD 3 ) the vehicle power of each vehicle (FZ i , FZ 3 , FZ 16 ) , in particular by means of a further handshake protocol, returns when the vehicle (FZ i , FZ 3 , FZ 16 ) digitally leaves the core area (KB) of the raster format (RF) with a last digital movement in the raster format (RF) and thus leaves the Lane danger zone (FGB, KZ, KZ ') has passed.
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18214063.2A EP3671690A1 (en) | 2018-12-19 | 2018-12-19 | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic |
| EP19829104.9A EP3873785A1 (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles, some of which are intending to change lanes, in a road danger zone, in particular road junctions in road traffic |
| US17/415,414 US11958479B2 (en) | 2018-12-19 | 2019-12-17 | Method, computer program product, central control unit and control system for controlling at least partly automated vehicles in a roadway danger zone, in particular intersections of roadways in road traffic |
| PCT/EP2019/085705 WO2020127309A1 (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles in a road danger zone, in particular road junctions in road traffic |
| PCT/EP2019/085703 WO2020127307A1 (en) | 2018-12-19 | 2019-12-17 | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles, some of which have excess vehicle lengths, in a road danger zone, particularly road junctions in road traffic |
| SG11202106338YA SG11202106338YA (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles in a road danger zone, in particular road junctions in road traffic |
| EP19829106.4A EP3874483A1 (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles in a road danger zone, in particular road junctions in road traffic |
| PCT/EP2019/085702 WO2020127306A1 (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles, some of which are intending to change lanes, in a road danger zone, in particular road junctions in road traffic |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18214063.2A EP3671690A1 (en) | 2018-12-19 | 2018-12-19 | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3671690A1 true EP3671690A1 (en) | 2020-06-24 |
Family
ID=64746175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18214063.2A Withdrawn EP3671690A1 (en) | 2018-12-19 | 2018-12-19 | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP3671690A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113867354A (en) * | 2021-10-11 | 2021-12-31 | 电子科技大学 | Regional traffic flow guiding method for intelligent cooperation of automatic driving of multiple vehicles |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130304279A1 (en) * | 2012-05-10 | 2013-11-14 | Carnegie Mellon University | Efficient intersection autonomous driving protocol |
| DE102012021282A1 (en) * | 2012-10-29 | 2014-04-30 | Audi Ag | Method for coordinating the operation of fully automated moving vehicles |
| US20140278029A1 (en) * | 2013-03-15 | 2014-09-18 | Carnegie Mellon University | Methods And Software For Managing Vehicle Priority In A Self-Organizing Traffic Control System |
| DE102015219467A1 (en) * | 2014-10-10 | 2016-04-14 | Continental Teves Ag & Co. Ohg | Method for operating a central server and method for handling a control card |
| DE102015002405A1 (en) * | 2015-02-24 | 2016-08-25 | Audi Ag | Method for traffic coordination of motor vehicles in a parking environment |
| DE102016200217A1 (en) * | 2016-01-12 | 2017-07-13 | Robert Bosch Gmbh | Method for predictive driving |
-
2018
- 2018-12-19 EP EP18214063.2A patent/EP3671690A1/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130304279A1 (en) * | 2012-05-10 | 2013-11-14 | Carnegie Mellon University | Efficient intersection autonomous driving protocol |
| DE102012021282A1 (en) * | 2012-10-29 | 2014-04-30 | Audi Ag | Method for coordinating the operation of fully automated moving vehicles |
| US20140278029A1 (en) * | 2013-03-15 | 2014-09-18 | Carnegie Mellon University | Methods And Software For Managing Vehicle Priority In A Self-Organizing Traffic Control System |
| DE102015219467A1 (en) * | 2014-10-10 | 2016-04-14 | Continental Teves Ag & Co. Ohg | Method for operating a central server and method for handling a control card |
| DE102015002405A1 (en) * | 2015-02-24 | 2016-08-25 | Audi Ag | Method for traffic coordination of motor vehicles in a parking environment |
| DE102016200217A1 (en) * | 2016-01-12 | 2017-07-13 | Robert Bosch Gmbh | Method for predictive driving |
Non-Patent Citations (3)
| Title |
|---|
| ABDELHAMEED MAGDY M ET AL: "Development and evaluation of a multi-agent autonomous vehicles intersection control system", 2014 INTERNATIONAL CONFERENCE ON ENGINEERING AND TECHNOLOGY (ICET), IEEE, 19 April 2014 (2014-04-19), pages 1 - 6, XP032725758, DOI: 10.1109/ICENGTECHNOL.2014.7016754 * |
| CHEN LEI ET AL: "Cooperative Intersection Management: A Survey", IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, IEEE, PISCATAWAY, NJ, USA, vol. 17, no. 2, 1 February 2016 (2016-02-01), pages 570 - 586, XP011597405, ISSN: 1524-9050, [retrieved on 20160129], DOI: 10.1109/TITS.2015.2471812 * |
| TACHET REMI; SANTI, PAOLO; SOBOLEVSKY STANISLAV; REYES-CASTRO; LUIS IGNACIO; FRAZZOLI, EMILIO; HELBING, DIRK; RATTI, CARLO: "Revisiting Street Intersections Using Slot-Based Systems", PLOS ONE, vol. 11, no. 3, 16 March 2016 (2016-03-16), pages e0149607, Retrieved from the Internet <URL:https://doi.org/10.1371/journal.pone.0149607> |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113867354A (en) * | 2021-10-11 | 2021-12-31 | 电子科技大学 | Regional traffic flow guiding method for intelligent cooperation of automatic driving of multiple vehicles |
| CN113867354B (en) * | 2021-10-11 | 2023-05-02 | 电子科技大学 | Regional traffic flow guiding method for intelligent cooperation of automatic driving multiple vehicles |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102015224338B4 (en) | Method and device in a motor vehicle for automated driving | |
| EP2944532B1 (en) | Traffic light assisting system for a vehicle with a display device | |
| DE102018216082A1 (en) | Method for cooperative maneuvering | |
| DE112018000436T5 (en) | SYSTEM AND METHOD FOR USING CROWD SOURCING PATH DATA IN AN AUTONOMOUS OR SEMI-AUTOMATIC DRIVE SYSTEM | |
| DE102016007899B4 (en) | Method for operating a device for traffic situation analysis, motor vehicle and data processing device | |
| DE102015208790A1 (en) | Determining a trajectory for a vehicle | |
| EP3566105A1 (en) | Method and system for providing an at least partially automatic guidance of a following vehicle | |
| DE102019100212A1 (en) | System and method for driving vehicles in column mode | |
| EP3063732B1 (en) | Situation analysis for a driver assistance system | |
| WO2020127010A1 (en) | Method and system for controlling a motor vehicle | |
| EP2842117A2 (en) | Method for displaying vehicle surroundings | |
| DE102013021337A1 (en) | Method for operating vehicle, involves outputting lane change recommendation when vehicle accident is prevented on currently traveling lane, fast driving on adjacent lane is performed and safe lane change on adjacent lane is performed | |
| DE102015209592A1 (en) | Method for arranging at least two vehicles and method for arranging at least two vehicle groups | |
| DE102017208244A1 (en) | SYSTEM AND METHOD | |
| EP2952412B1 (en) | Method for driver assistance in a large car park area and driving maneuver system | |
| EP3671690A1 (en) | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles in a hazardous area, in particular intersections of roads in road traffic | |
| WO2020127309A1 (en) | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles in a road danger zone, in particular road junctions in road traffic | |
| EP3994902B1 (en) | Method for cooperative resource allocation for performing movement manoeuvres in a road area, and related control circuit and motor vehicle having such a control circuit | |
| DE102017222563A1 (en) | Method and device for communication between several motor vehicles | |
| EP3671691A1 (en) | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles, in particular extra-long vehicles, in a hazardous area, in particular intersections of roads in road traffic | |
| EP3670284A1 (en) | Method, computer program product, central control unit and control system for controlling at least partially automated vehicles, with roadway view changes in a hazardous area, in particular intersections of roads in road traffic | |
| DE102019114190A1 (en) | Data carrier, method for the automated control of a vehicle and method for generating a data carrier | |
| DE102022211851A1 (en) | Method and system for infrastructure-supported assistance of at least one networked motor vehicle during an at least partially automated journey through a road infrastructure | |
| DE102023116536B3 (en) | Method for operating an autonomously controlled vehicle, autonomously controllable motor vehicle and system | |
| DE112022006503T5 (en) | ACTION PLANNING DEVICE AND ACTION PLANNING PROCEDURE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20210112 |