EP3671690A1 - Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours - Google Patents
Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours Download PDFInfo
- Publication number
- EP3671690A1 EP3671690A1 EP18214063.2A EP18214063A EP3671690A1 EP 3671690 A1 EP3671690 A1 EP 3671690A1 EP 18214063 A EP18214063 A EP 18214063A EP 3671690 A1 EP3671690 A1 EP 3671690A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- format
- lane
- vehicles
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/164—Centralised systems, e.g. external to vehicles
Definitions
- the invention relates to a method for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, according to the preamble of claim 1, a computer program product for controlling at least partially automated vehicles in a lane hazard zone, in particular Intersections of roadways in road traffic, according to the preamble of claim 6, a central control unit for controlling at least partially automated vehicles in a lane danger area, in particular intersections of roadways in road traffic, according to the preamble of claim 10 and a control system for controlling at least partially automated vehicles in one Roadway danger zone, in particular intersections of roadways in road traffic, according to the preamble of claim 16.
- a hazard area in road traffic is an area where a hazard exists, which is defined as the possibility that a person, a thing, an animal, or even a natural death encounters at least one of the sources of time and space as a potential source of damage. This is usually the case in the lane area, which is why one speaks of a lane danger area. Based on these definitions, a typical, if not the only, lane danger area in road traffic is the area where one or more lanes meet - the lane intersection or, in short, the intersection.
- intersections In or at intersections, there may be conflicts of interest among road users who want to cross the intersection at the same time come. So there is a need for regulation. For this reason, intersections are currently protected by traffic signs, eg signaling signs in the form of traffic lights, or by traffic rules.
- traffic signs eg signaling signs in the form of traffic lights
- FIGURE 1 shows in a schematic diagram the current situation in the regulation of a lane traffic, eg road traffic, in lane danger areas FGB in the form of a "double-T" crossing KZ * or "T" crossing KZ **.
- intersection KZ * all road users who move in the "NORD-> SÜD- or SÜD-> NORD" direction can pass the intersection KZ * because the traffic lights for these road users have the green signal sign show, while all road users who move in "WEST-> OST- or OST-> WEST" direction cannot pass the KZ * intersection, e.g. have to wait at or in front of the traffic lights because the traffic lights show the red signal for these road users.
- the situation is different at the "T" crossing KZ **.
- the road users who move in the "WEST-> OST- or OST->WEST” direction or in the NORTH direction are due to the traffic lights with a green signal sign or no signal sign (applies to vehicles FZ 35 , FZ 36 , are traveling in the NORTH direction) authorized to pass the intersection or to move on, whereas the road users who are traveling in the "SOUTH” direction have to wait at or in front of the traffic light system because the traffic light systems show the red signal for these road users.
- a prerequisite for such a concept is that, firstly, the transport infrastructure is adapted, for example in cities through expensive construction measures (see description of FIGURE 2 ), and secondly, almost exclusively autonomously operated vehicles take part in traffic, which are also equipped with the latest communication and sensor technology.
- the object on which the invention is based is to specify a method, a computer program product, a central control unit and a control system for controlling at least partially automated vehicles in a lane danger zone, in particular intersections of lanes in road traffic, in which the Vehicles are controlled in such a way that they can pass the lane danger area in a flowing flow of traffic without stopping-starting interruptions, such as those that arise, for example, from signaling systems, preferably traffic lights.
- the normal case is assumed in which the at least partially automated vehicles pass the danger zone or the intersection without any peculiarities in terms of vehicle properties and driving behavior in the danger / intersection area.
- the at least partially automated vehicle that wants to pass the lane danger area or the intersection has an excess length of vehicle or - special case 2 -
- the at least partially automated vehicle that wants to pass the lane danger area or the intersection which intends to change the lane in the danger / intersection area, requires an adapted vehicle control in the special cases mentioned compared to the normal case dealt with in the present patent application. What this adaptation in the vehicle control system looks like for the two special cases is dealt with in parallel patent applications.
- the traffic no longer needs to be interrupted.
- traffic control measures such as traffic lights, traffic signs, pedestrian crossings, etc. are no longer required.
- the vehicle availability powers are preferably given with the aid of first control data, which each vehicle transmits to the central control unit when the roadway danger zone approaches.
- the control of the vehicle movements of each vehicle of the vehicles as a result of the vehicle availability powers is preferably carried out with the aid of second control data, which are transmitted to the central control unit for each vehicle to pass through the lane danger zone.
- the central control entity is preferably a central control unit consisting of a control device with a computer program product, which contains a non-volatile, readable memory in which processor-readable control program commands of a program module performing vehicle control are stored, and a processor connected to the memory , which executes the control program commands of the program module for vehicle control, a control interface and at least one communication device which is connected in terms of communication technology either to the control device and therein to the computer program product via the control interface or to the control device and the computer program product therein assigned.
- control device is preferably and advantageously designed as an open cloud computing platform.
- the communication device is arranged in the roadway danger zone in such a way that it is connected to a vehicle communication interface contained in the vehicles for vehicle control.
- This connection is preferably of a radio-technical nature, for example designed according to a mobile radio standard of the generation 5G.
- the number of communication devices exists in the lane danger zone, for example in a "double T" intersection (cf. FIGURES 1 and 2nd ), preferably from four individual communication devices, which are positioned at all four intersection corners in order to always have an optimal radio connection to the vehicles or the respective vehicle communication interface.
- Dynamic, vehicle-coordinated and collision-free in the context of the invention means that the vehicle movements of the respective vehicle are coordinated with the movements of the other vehicles in the lane-danger zone by means of the digital lane-danger zone twin at any location and at any time so that the respective one Vehicle passes the lane danger area without any collision with the other vehicles.
- each vehicle is moved in accordance with a spatio-temporal movement pattern in the lane danger zone in such a way that it is ensured that all vehicles in the lane danger zone that release the vehicle power to control the dynamic driving tasks have to be able to pass it without collision.
- a core area of the grid format represents the lane danger zone and first format fields of the grid format, depending on the format field change, either "WEST-> OST- and / or OST->WEST" vehicle movement directions or "NORD"-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions and second format fields of the raster format depending on the format field change either "NORTH-> SOUTH and / or SOUTH-> NORTH "vehicle movement directions or "WEST-> EAST and / or EAST-> WEST "vehicle movement directions, each with at most one vehicle per first format field or second format field.
- each vehicle movement of the vehicle to pass the lane danger zone is controlled automatically, dynamically, vehicle-coordinated and - collision-free due to the given vehicle disposal powers - that corresponds to the situation in the lane-danger zone the vehicle in the core area of the grid format according to a digital movement with a START point and a DESTINATION point in the grid format, which is based on a format field change, either from a first format field of the first format fields as the START point of the digital movement to an adjacent second format field of the second format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement, or from a second format field of the second format fields as the START point of the digital movement to an adjacent first format field of the first format fields as the TARGET point of the digital movement that no vehicle represents the vehicles - that is, digitally free for the digital movement, is moved digitally.
- the advantageous further development of the vehicle control system according to the invention means that the vehicle power is available to everyone Vehicle returned from the central control instance. This can be achieved in a simple and advantageous manner with the aid of a further handshake protocol. In the course of this further handshake protocol, third control data initiating the return of the vehicle power is then transmitted to the vehicle.
- the at least partially automated, motorized vehicles FZ 1 ... FZ 36 are distributed in the manner shown to the roadway danger zones FGB designed as a "double-T" intersection KZ and as a "T" intersection KZ '.
- the vehicle control at least partially automated, motorized vehicles in the lane danger area come according to the explanations in connection with the description of FIGURE 1 only vehicles of the classification levels "3" to "5" in question and possibly also those of the level "2".
- the central control unit STGE of the control system STGS shown as an example is, according to this representation, at least only for vehicle control partially automated, motorized vehicles in the FGB lane danger zone designed as a "double-T" intersection.
- the vehicle control of the road danger zones FGB designed as a "T" intersection KZ 'and each further road danger zone FGB in the control system STGS, both in the FIGURE 2 not explicitly shown, can either be taken over by the control unit STGE shown or in each case by further control units, not shown.
- the lane danger area FGB designed as a "double-T" intersection KZ will be considered in more detail.
- the "double T" crossing KZ * in the FIGURE 1 moves a dynamically changing and continuously moving number of vehicles of the at least partially automated, motorized vehicles FZ 1 ...
- the central control unit STGE has a control device STER and at least one communication device KOER, which are either connected to one another or assigned to one another in terms of communication technology.
- control device STER is preferably and advantageously designed as an open cloud computing platform.
- the communication device KOER is preferably a radio communication device designed for the mobile radio standard of the 5th generation (5G) and is in both cases ("either" option and “or” option) in the lane designed as a "double-T" crossing KZ
- the danger area FGB is arranged in such a way that the danger / intersection area FGB, KZ is optimally covered in terms of radio technology and in such a way that the at least partially automated, motorized vehicles located in the danger / intersection area FGB, KZ reach the vehicle control via radio at any time - and are responsive.
- KZ there are, for example, four individual communication devices or radio communication devices KOER, which are positioned at all four intersection corners in order to always have an optimal radio connection to the vehicles in the danger / intersection area FGB, KZ.
- Each vehicle FZ i - in general - and the considered vehicles FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 - in particular - of the at least partially automated, motorized vehicles FZ 1 ... FZ 36 exist if they approach or approach the danger / intersection area FGB, KZ for passing through the carriageway danger area FGB or the "double-T" intersection KZ, a vehicle availability force for vehicle control of dynamic driving tasks in the respective vehicle.
- the expression "approaching" means that the vehicle must have given the vehicle power in good time before the vehicle enters the danger / intersection area FGB, KZ, because otherwise collision-free vehicle control in the danger / intersection area FGB, KZ is not ensured can be.
- This "handshake protocol" agreement is made on the one hand in terms of communication technology via the radio connection between the vehicle communication interface or vehicle radio communication interface FZKS and the communication device or radio communication device KOER and on the other hand between the communication device KOER and the control device STER.
- the vehicle availability is preferably given with the aid of first control data STGD 1 , which each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as the danger / intersection area approaches FGB, KZ or in the run-up to communication technology, via the transmission path shown above to the control device STER in the central control unit STGE.
- first control data STGD 1 are transmitted in the course of the handshake protocol to the control device STER in the central control unit STGE if the handover of the vehicle is already agreed in advance of the approach.
- FIGURE 3 shows the basic structure of the control device STER in the control unit STGE in the FIGURE 2 shown control system STGS for vehicle control by generating a lane-danger zone twin FGBZ.
- the control device STER has a control interface STSS and a computer program product CPP for vehicle control of the at least partially automated, motorized vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 in the danger zone. / Crossing area FGB, KZ on.
- the computer program product CPP contains a non-volatile, readable memory SP, in which processor-readable control program instructions of a program module PGM carrying out the vehicle control are stored, and a processor PZ connected to the memory SP, which stores the control program instructions of the program module PGM for vehicle control and is connected to the control interface STSS.
- the processor PZ then generates the digital lane danger area with the receipt of the first control data STGD 1 and the delivery of the vehicle availability powers by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31.
- Twin FGBZ by means of the vehicle movements of vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the given vehicle disposition powers to pass the road hazard area FGB or the "double T" -Crossing KZ can be controlled automatically, dynamically, vehicle-coordinated and - collision-free.
- the processor PZ generates second control data STGD 2 on the basis of the generated digital lane-danger zone twin FGBZ, which reach the communication device KOER or the radio communication device KOER via the control interface STSS and from there as shown in FIG FIGURE 2 Via the vehicle communication interface or vehicle radio communication interface FZKS ultimately into the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 , which means that they pass through the road hazard area FGB or the "double-T" intersection can be controlled.
- the processor PZ executes the program module PGM for each vehicle FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 as a result of the vehicle disposal powers given by the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 and using the communication path between these vehicles and the control device STER or the computer program -Product CPP vehicle trajectory and vehicle speed determined.
- the processor PZ determines when executing the program module PGM which vehicles pass the lane-danger zone FGB or the "double-T" intersection Have passed the concentration camp. As shown in the FIGURE 2 these are the vehicles FZ i , FZ 3 , FZ 16 .
- the vehicle disposal powers given by these vehicles FZ i , FZ 3 , FZ 16 for passing through the road danger zone FGB or the "double-T" intersection KZ are generated by each processor FZ i , FZ 3 , FZ 16 by the processor PZ, Returned third control data STGD 3 via the existing communication path between these vehicles and the control device STER or the computer program product CPP.
- the third control data STGD 3 is preferably transmitted in the course of a further handshake protocol between the control device STER via the communication device KOER and the vehicle FZ i , FZ 3 , FZ 16 .
- the vehicle movements of the vehicles FZ i , FZ 2 , FZ 11 , FZ 14 , FZ 15 , FZ 18 , FZ 22 , FZ 31 to pass the lane danger area FGB or the "double-T" intersection KZ are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner and then furthermore it is recognized and determined when a vehicle enters the carriageway danger area FGB or the "double-T" intersection KZ happened in the following using FIGURE 4 explained.
- FIGURE 4 shows a first digital representation DRP1 of a first traffic situation created by the lane-danger zone twin FGBZ, when it was generated in the control device STER or the computer program product CPP, with a lane completely occupied and occupied by at least partially automated, motorized vehicles. Danger area in the form of a "double T" crossing.
- the first traffic situation has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the first digital representation DPR1 shown is intended to explain in general how vehicle movements at least partially automated, motorized vehicles, which completely drive and occupy the "double-T" intersection, are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass them.
- the first traffic situation shown is 30 vehicles, represented by white circles in the first format fields FF1, digital and unidirectional in EAST-> WEST direction and 22 vehicles, represented by black circles in the second format fields FF2, digital and unidirectional in NORTH-> SOUTH -Direction and uniform in the entire raster format RF, with the double arrows on the white circles and the arrows on the black circles always indicate the respective direction of movement.
- the format fields FF1, FF2 of the raster format RF of the first digital representation DRP1 are selected such that vehicles with normal, normal and defined vehicle length are represented digitally in the fields at rest and in motion without touching one another.
- the first traffic situation according to the FIGURE 4 transferred to the "double-T" intersection in the FIGURE 2 , means that two lane directions with 6 parallel lanes each, lane with 6 parallel lanes in the EAST-> WEST direction and lane with 6 parallel lanes in the NORTH-> SOUTH direction intersect and in the intersection area corresponds to the key area KB of the grid format RF (chess board with 36 fields), 18 vehicles are traveling in the EAST-> WEST direction and NORTH-> SOUTH direction.
- each vehicle movement of the 36 vehicles to pass the "double-T" intersection is controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly each vehicle of the 36 vehicles in the core area KB of the raster format RF according to a digital movement with a START point and a DEST point in the raster format RF, which is based on a format field change, either from a first format field of the first format fields FF1 as the START point of the digital movement to an adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - i.e.
- FIGURE 3 can be achieved in a simple and advantageous manner using the further handshake protocol.
- FIGURE 5 shows - as in the FIGURE 4 - One by the lane-danger zone twin FGBZ, after its generation in the control device STER or the computer program product CPP FIGURE 3 , created second digital representation DRP2 of a second traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection.
- the second traffic situation also has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the second digital representation DPR2 shown should also be explained in a very general way how vehicle movements of the at least partially automated, motorized vehicles which completely drive and occupy the "double-T" intersection are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass through them.
- the second traffic situation shown shows 32 vehicles, represented by white circles in the first format fields FF1, digital and bidirectional, of which 17 vehicles in the EAST-> WEST direction, 15 vehicles in the WEST-> EAST direction and 21 vehicles, represented by black circles in the second format fields FF2, digital and bidirectional of which 11 vehicles in the NORTH-> SOUTH direction and 10 vehicles in the SOUTH-> NORTH direction and all in the entire raster format RF, with the double arrows on the white circles and the arrows on the black ones Circles always indicate the respective direction of movement.
- the second traffic situation in the FIGURE 5 through four lane directions, each with 3 parallel, side-by-side lanes - one lane with 3 parallel, side-by-side lanes in the EAST-> WEST direction, one lane with 3 parallel, side-by-side lanes in the opposite direction, in the WEST-> EAST direction, one lane with 3 parallel, side-by-side lanes in the NORTH-> SOUTH direction and one lane with 3 parallel, side-by-side lanes in the opposite direction, in the SOUTH-> NORTH direction - marked, which intersect, and in the in the intersection area - corresponds to the core area KB of Grid format RF (chess board with 36 fields) - 9 vehicles are traveling in EAST-> WEST direction, in WEST-> EAST direction, in NORTH-> SOUTH direction and SOUTH-> NORTH direction.
- Grid format RF chess board with 36 fields
- each vehicle movement of the 36 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly each vehicle of the 36 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either from the first format field of the first format fields FF1 as the START point of the digital movement to the adjacent second format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent any of the 36 vehicles - is digitally free for digital movement, or from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 36 vehicles - that is, digitally free for the digital movement, is moved digitally.
- the finite chain reaction of successive digital movements takes place, which begins, for example, on the basis of the FIGURE 5 , with the first digital movement from the format field FF1 x of the first format fields FF1, which represents the vehicle FZ x , as the START point to the format field FF2 y of the second format fields FF2 as the DESTINATION point, which represents no vehicle, that is to say is digitally free, and has its end when all 36 vehicles that were initially in the core area KB of the raster format RF have left the key area KB of the raster format RF.
- FIGURE 3 can be achieved again in a simple and advantageous manner with the aid of the further handshake protocol.
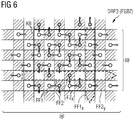
- FIGURE 6 shows - as in the FIGURES 4 and 5 - One by the lane-danger zone twin FGBZ, when it is generated in the control device STER or the computer program product CPP after FIGURE 3 , created third digital representation DRP3 of a third traffic situation with a lane danger area completely occupied and occupied by at least partially automated, motorized vehicles in the form of a "double-T" intersection.
- the third traffic situation - like the first and second traffic situation - has nothing to do with the traffic situation in the FIGURE 2 shown danger / intersection area FGB, KZ to do.
- the third digital representation DPR3 shown is also intended to be explained in a very general way how vehicle movements of the at least partially automated, motorized vehicles which completely drive and occupy the "double-T" intersection are controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner to pass them.
- the third traffic situation in the FIGURE 6 due to four lane directions with 3 parallel, not all adjacent lanes - one lane with 3 parallel, not all adjacent lanes in the EAST-> WEST direction, one lane with 3 parallel, not all adjacent lanes in the opposite direction, in the WEST-> EAST -Direction, a lane with 3 parallel lanes, not all adjacent lanes in the NORTH-> SOUTH direction and a lane with 3 parallel lanes, not all adjacent Lanes in the opposite direction, in the SOUTH-> NORTH direction - marked, which intersect, and in the in the intersection area - corresponds to the core area KB of the raster format RF (chess board with 36 fields) - 9 vehicles in the EAST-> WEST direction, 6 Vehicles in WEST-> EAST direction, 9 vehicles in NORTH-> SOUTH direction and 6 vehicles in SOUTH-> NORTH direction.
- each vehicle movement of the 30 vehicles to pass the "double-T" intersection is again controlled automatically, dynamically, in a vehicle-coordinated and collision-free manner, by correspondingly again each vehicle of the 30 vehicles in the core area KB of the raster format RF according to the digital movement with the START point and the DESTINATION point in the raster format RF, which is based on the format field change, either from the first format field of the first format fields FF1 as the START point of the digital movement to the neighboring second Format field of the second format fields FF2 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - that is, digitally free for the digital movement, or from the second format field of the second format fields FF2 as the START point of the digital movement to the adjacent first format field of the first format fields FF1 as the TARGET point of the digital movement, which does not represent a vehicle of the 30 vehicles - i.e. is digitally free
- the finite chain reaction of successive digital movements takes place, which begins, for example, on the basis of the FIGURE 6 , with the first digital movement from the format field FF1 x of the first format fields FF1, which represents the vehicle FZ x , as the START point to the format field FF2 y of the second format fields FF2 as the DESTINATION point, which represents no vehicle, that is to say is digitally free, and has its end when all 30 vehicles that were initially in the core area KB of the raster format RF have left the key area KB of the raster format RF.
- FIGURE 3 can also be achieved again in a simple and advantageous manner with the aid of the further handshake protocol.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18214063.2A EP3671690A1 (fr) | 2018-12-19 | 2018-12-19 | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours |
| PCT/EP2019/085705 WO2020127309A1 (fr) | 2018-12-19 | 2019-12-17 | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisés dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière |
| SG11202106338YA SG11202106338YA (en) | 2018-12-19 | 2019-12-17 | Method, computer programme product, central control unit, and control system for controlling at least partially automated vehicles in a road danger zone, in particular road junctions in road traffic |
| EP19829106.4A EP3874483A1 (fr) | 2018-12-19 | 2019-12-17 | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisés dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière |
| US17/415,414 US11958479B2 (en) | 2018-12-19 | 2019-12-17 | Method, computer program product, central control unit and control system for controlling at least partly automated vehicles in a roadway danger zone, in particular intersections of roadways in road traffic |
| PCT/EP2019/085702 WO2020127306A1 (fr) | 2018-12-19 | 2019-12-17 | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisé, en partie avec des perspectives de changement de voie de circulation, dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière |
| PCT/EP2019/085703 WO2020127307A1 (fr) | 2018-12-19 | 2019-12-17 | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisé, en partie ayant des longueurs exceptionnelles, dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière |
| EP19829104.9A EP3873785A1 (fr) | 2018-12-19 | 2019-12-17 | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisé, en partie avec des perspectives de changement de voie de circulation, dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18214063.2A EP3671690A1 (fr) | 2018-12-19 | 2018-12-19 | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3671690A1 true EP3671690A1 (fr) | 2020-06-24 |
Family
ID=64746175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18214063.2A Withdrawn EP3671690A1 (fr) | 2018-12-19 | 2018-12-19 | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP3671690A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113867354A (zh) * | 2021-10-11 | 2021-12-31 | 电子科技大学 | 一种自动驾驶多车智能协同的区域交通流导引方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130304279A1 (en) * | 2012-05-10 | 2013-11-14 | Carnegie Mellon University | Efficient intersection autonomous driving protocol |
| DE102012021282A1 (de) * | 2012-10-29 | 2014-04-30 | Audi Ag | Verfahren zur Koordination des Betriebs von vollautomatisiert fahrenden Kraftfahrzeugen |
| US20140278029A1 (en) * | 2013-03-15 | 2014-09-18 | Carnegie Mellon University | Methods And Software For Managing Vehicle Priority In A Self-Organizing Traffic Control System |
| DE102015219467A1 (de) * | 2014-10-10 | 2016-04-14 | Continental Teves Ag & Co. Ohg | Verfahren zum Betreiben eines zentralen Servers und Verfahren zum Handhaben einer Regelkarte |
| DE102015002405A1 (de) * | 2015-02-24 | 2016-08-25 | Audi Ag | Verfahren zur Verkehrskoordinierung von Kraftfahrzeugen in einer Parkumgebung |
| DE102016200217A1 (de) * | 2016-01-12 | 2017-07-13 | Robert Bosch Gmbh | Verfahren zum vorausschauenden Fahren |
-
2018
- 2018-12-19 EP EP18214063.2A patent/EP3671690A1/fr not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130304279A1 (en) * | 2012-05-10 | 2013-11-14 | Carnegie Mellon University | Efficient intersection autonomous driving protocol |
| DE102012021282A1 (de) * | 2012-10-29 | 2014-04-30 | Audi Ag | Verfahren zur Koordination des Betriebs von vollautomatisiert fahrenden Kraftfahrzeugen |
| US20140278029A1 (en) * | 2013-03-15 | 2014-09-18 | Carnegie Mellon University | Methods And Software For Managing Vehicle Priority In A Self-Organizing Traffic Control System |
| DE102015219467A1 (de) * | 2014-10-10 | 2016-04-14 | Continental Teves Ag & Co. Ohg | Verfahren zum Betreiben eines zentralen Servers und Verfahren zum Handhaben einer Regelkarte |
| DE102015002405A1 (de) * | 2015-02-24 | 2016-08-25 | Audi Ag | Verfahren zur Verkehrskoordinierung von Kraftfahrzeugen in einer Parkumgebung |
| DE102016200217A1 (de) * | 2016-01-12 | 2017-07-13 | Robert Bosch Gmbh | Verfahren zum vorausschauenden Fahren |
Non-Patent Citations (3)
| Title |
|---|
| ABDELHAMEED MAGDY M ET AL: "Development and evaluation of a multi-agent autonomous vehicles intersection control system", 2014 INTERNATIONAL CONFERENCE ON ENGINEERING AND TECHNOLOGY (ICET), IEEE, 19 April 2014 (2014-04-19), pages 1 - 6, XP032725758, DOI: 10.1109/ICENGTECHNOL.2014.7016754 * |
| CHEN LEI ET AL: "Cooperative Intersection Management: A Survey", IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, IEEE, PISCATAWAY, NJ, USA, vol. 17, no. 2, 1 February 2016 (2016-02-01), pages 570 - 586, XP011597405, ISSN: 1524-9050, [retrieved on 20160129], DOI: 10.1109/TITS.2015.2471812 * |
| TACHET REMI; SANTI, PAOLO; SOBOLEVSKY STANISLAV; REYES-CASTRO; LUIS IGNACIO; FRAZZOLI, EMILIO; HELBING, DIRK; RATTI, CARLO: "Revisiting Street Intersections Using Slot-Based Systems", PLOS ONE, vol. 11, no. 3, 16 March 2016 (2016-03-16), pages e0149607, Retrieved from the Internet <URL:https://doi.org/10.1371/journal.pone.0149607> |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113867354A (zh) * | 2021-10-11 | 2021-12-31 | 电子科技大学 | 一种自动驾驶多车智能协同的区域交通流导引方法 |
| CN113867354B (zh) * | 2021-10-11 | 2023-05-02 | 电子科技大学 | 一种自动驾驶多车智能协同的区域交通流导引方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102015224338B4 (de) | Verfahren und Vorrichtung in einem Kraftfahrzeug zum automatisierten Fahren | |
| EP2944532B1 (fr) | Système d'assistance de feu de circulation pour un véhicule doté d'un dispositif d'affichage | |
| DE102018216082A1 (de) | Verfahren zur kooperativen Manöverabstimmung | |
| DE112018000436T5 (de) | System und verfahren zur verwendung von crowd-sourcing-fahrwegsdaten ineinem autonomen oder halbautonomen antriebssystem | |
| DE102016007899B4 (de) | Verfahren zum Betreiben einer Einrichtung zur Verkehrssituationsanalyse, Kraftfahrzeug und Datenverarbeitungseinrichtung | |
| DE102015208790A1 (de) | Bestimmen einer Trajektorie für ein Fahrzeug | |
| EP3566105A1 (fr) | Procédé et système de préparation d'une conduite au moins partiellement automatique d'un véhicule suiveur | |
| DE102019100212A1 (de) | System und Verfahren zum fahren von Fahrzeugen im Kolonnenmodus | |
| EP3063732B1 (fr) | Analyse de la situation pour un système d'assistance au conducteur | |
| WO2020127010A1 (fr) | Procédé et système de commande d'un véhicule automobile | |
| EP2842117A2 (fr) | Procédé de représentation de l'environnement d'un véhicule | |
| DE102013021337A1 (de) | Verfahren und Vorrichtung zum Betrieb eines Fahrzeugs | |
| DE102015209592A1 (de) | Verfahren zu einer Anordnung von wenigstens zwei Fahrzeugen und Verfahren zu einer Anordnung von wenigstens zwei Fahrzeugverbänden | |
| DE102017208244A1 (de) | System und verfahren | |
| EP2952412B1 (fr) | Procédé d'aide à la conduite sur un grand parc de stationnement et système de man uvre | |
| EP3671690A1 (fr) | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés dans une zone routière dangereuse, en particulier dans des carrefours | |
| WO2020127309A1 (fr) | Procédé, produit-programme d'ordinateur, unité de commande centrale et système de commande pour commander des véhicules au moins semi-automatisés dans une zone de voie de circulation à risque, notamment des croisements de voies de circulation dans la circulation routière | |
| EP3994902B1 (fr) | Procédé d'allocation coopérative de ressources pour l'exécution de manoeuvres de déplacement dans une zone routière, circuit de commande correspondant et véhicule à moteur équipé d'un tel circuit de commande | |
| WO2023057014A1 (fr) | Procédé de planification d'une trajectoire d'une manœuvre de conduite d'un véhicule motorisé, produit de programme informatique, support de stockage lisible par ordinateur, et véhicule | |
| DE102017222563A1 (de) | Verfahren und Vorrichtung zur Kommunikation zwischen mehreren Kraftfahrzeugen | |
| EP3671691A1 (fr) | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés, proportionnellement aux surlongueurs de véhicule, dans une zone dangereuse routière, en particulier carrefours des voies dans la circulation routière | |
| EP3670284A1 (fr) | Procédé, produit programme informatique, unité centrale de commande et système de commande permettant de commander des véhicules au moins partiellement automatisés, proportionnellement aux intentions de changement de voie, dans une zone routière dangereuse , en particulier dans des carrefours | |
| DE102019114190A1 (de) | Datenträger, Verfahren zum automatisierten Steuern eines Fahrzeugs sowie Verfahren zum Generieren eines Datenträgers | |
| DE102022211851A1 (de) | Verfahren und System zum infrastrukturgestützten Assistieren mindestens eines vernetzten Kraftfahrzeugs bei einer zumindest teilautomatisiert geführten Fahrt durch eine Straßeninfrastruktur | |
| DE102023116536B3 (de) | Verfahren zum Betreiben eines autonom gesteuerten Fahrzeugs, autonom steuerbares Kraftfahrzeug sowie System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20210112 |