EP2987759B1 - Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible - Google Patents
Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible Download PDFInfo
- Publication number
- EP2987759B1 EP2987759B1 EP14181264.4A EP14181264A EP2987759B1 EP 2987759 B1 EP2987759 B1 EP 2987759B1 EP 14181264 A EP14181264 A EP 14181264A EP 2987759 B1 EP2987759 B1 EP 2987759B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- control device
- deflection angle
- suspension point
- load suspension
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 141
- 239000000725 suspension Substances 0.000 claims description 127
- 238000000034 method Methods 0.000 claims description 60
- 230000001133 acceleration Effects 0.000 claims description 30
- 238000004590 computer program Methods 0.000 claims description 15
- 230000010355 oscillation Effects 0.000 claims description 11
- 230000009467 reduction Effects 0.000 claims description 4
- 238000011144 upstream manufacturing Methods 0.000 claims 1
- 230000008569 process Effects 0.000 description 22
- 230000008859 change Effects 0.000 description 13
- 238000013459 approach Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000007493 shaping process Methods 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 241000282326 Felis catus Species 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/06—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads
- B66C13/063—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads electrical
Definitions
- the present invention is further based on a computer program, the computer program comprising machine code which can be processed by a control device for a crane, wherein the execution of the machine code by the control device causes the control device to operate the crane according to such a method.
- the present invention is further based on a control device for a crane, wherein the control device is programmed with such a computer program.
- Cranes often have a substantially horizontally oriented boom on which a trolley is linearly movable.
- the trolley in this case corresponds to the load suspension point of the present invention.
- the crane as a whole can also be moved.
- the direction of travel of the crane as a whole in this case usually also runs horizontally, but orthogonally to the direction of travel of the trolley.
- Such cranes can be designed in particular as container bridges.
- a pendulum movement of the load has a negative effect, in particular, when the load still oscillates at the destination where the load is to be set down. Because in this case often has to wait until the pendulum movement has subsided. Alternatively, the pendulum movement must be damped, for example by manual intervention of the crane operator in manual control mode. Both take time and therefore have a negative effect on the handling capacity.
- the object of the present invention is to provide means by which a time-optimal way a handling of loads is possible.
- the defined pendulum state can be determined as needed.
- the defined end value of the deflection angle of the pendulum motion is zero.
- the defined end value of the time derivative of the deflection angle of the oscillating movement is zero or maximum.
- the load suspension point When moving the load suspension point, starting from an initial location, the load suspension point is usually accelerated with a defined (usually the maximum possible) acceleration until the load suspension point reaches a defined (usually the maximum possible) speed. At the beginning of the acceleration process, the load rests, so does not oscillate. The braking of the load suspension point at the destination takes place in an inverse manner. In particular, in the case that both the defined final value of the deflection angle and the defined End value of the time derivative of the deflection angle are zero, therefore, in this case, it is ensured that the pendulum state of the load at the beginning of deceleration is inverse to that pendulum state, which has reached the load at the end of the acceleration process. This is readily possible because the time point at which deceleration begins can be easily calculated beforehand, and further adjusted by varying the rope length during the process to a boundary location at which the braking operation is started, the phase position of the oscillating motion can be.
- the load often first depends on an initial location of the travel movement of the load suspension point without oscillation under the load suspension point, wherein the control further accelerates the load suspension point by driving the drive from the initial location with a predetermined acceleration to the destination until the load suspension point with a predetermined speed, and the controller then reduces the acceleration to zero.
- the control device it is possible, in particular, for the control device to determine the initial deflection angle of the pendulum movement and / or the initial derivation of the deflection angle of the pendulum movement on the basis of the predetermined acceleration and the predetermined speed as well as the cable length during the acceleration.
- the control device reduces the rope length to the initial rope length, in which case the control device takes into account the reduction the rope length in determining the initial deflection angle of the pendulum motion and / or the initial derivative of the deflection angle of the pendulum motion.
- control device continuously detects the deflection angle of the pendulum movement and / or the time derivative of the deflection angle of the pendulum movement and continuously determines the time course of the cable length.
- the load suspension point on a boom of the crane by means of a trolley in a travel direction is movable.
- the vertical plane to which the pendulum movement of the load is related therefore, can in particular be parallel to the direction of travel. If it is possible in addition to the method of the trolley in the direction of travel to move the crane as a whole orthogonal to the direction of travel of the trolley, alternatively, the vertical plane to which the pendulum movement of the load is related, orthogonal to the direction of travel.
- control device determines the time course of the cable length, taking into account the changed movement of the load suspension point.
- the object is further achieved by a computer program having the features of claim 11.
- the execution of the computer program causes the control device to operate the crane in accordance with a method according to the invention.
- control device for a crane having the features of claim 12.
- control device is programmed with a computer program according to the invention.
- the object is further achieved by a crane having the features of claim 13.
- the control device of the crane is designed according to the invention.
- a crane 1 has a load suspension point 2.
- the load suspension point 2 for example, as shown in the 1 and 2 be arranged on a trolley 3, which is movable on a boom 4 of the crane 1 in a direction of travel.
- the method of the trolley 3 by means of a Katzantriebs 3 '.
- a cable system 5 runs to a load 6.
- the load 6 is suspended via the cable system 5 at the load suspension point 2.
- a rope length L of the cable system 5 By adjusting a rope length L of the cable system 5, the load 6 can be raised and lowered.
- the adjustment of the rope length L by means of a hoist 5 '.
- the crane 1 as a whole is movable orthogonally to the direction of travel of the trolley 3.
- the method of the crane 1 as a whole is done by means of a crane drive 1 '.
- the crane 1 is controlled by a control device 7.
- the control device 7 is generally designed as a software programmable control device.
- the design of the control device 7 is effected in this case by a computer program 8, with which the control device 7 is programmed.
- the computer program 8 comprises machine code 9, which can be processed by the control device 7.
- the execution of the machine code 9 by the control device 7 causes the control device 7 operates the crane 1.
- the processing of the machine code 9 by the control device 7 initially causes the normal handling of the load 6 or the normal operation of the crane 1, as in the prior art also. In addition, however, the processing of the machine code 9 by the control device 7 additionally causes the control device 7 to operate the crane 1 during the loading of the load 6 according to a method for influencing a pendulum movement of the load 6, which will be explained in more detail below.
- the computer program 8 can be supplied to the control device 7 in any desired manner. As shown in the 1 and 2 the supply of the computer program 8 via a data carrier 10, on which the computer program 8 in machine-readable form - for example, in electronic form - is deposited.
- the data carrier 10 can as shown in the 1 and 2 be designed for example as a USB memory stick. However, other embodiments are possible as well.
- FIG. 3 Before going into the present invention as such will be discussed in more detail below, first in conjunction with FIG. 3 explains the physical principles in more detail.
- the case is considered that the trolley 3 in its Moving direction is moved and the crane 1 is not moved as a whole in its direction of travel.
- the corresponding embodiments can be transferred analogously to a method of the crane 1 as a whole in its direction of travel.
- ⁇ denotes the deflection angle of the load 6 from a vertical plane 11 which contains the load suspension point 2 and within which the load 6 oscillates.
- the vertical plane 11 runs in the case outlined, in which the trolley 3 is moved, parallel to the direction of travel of the trolley 3. This plane is in FIG. 2 dashed lines.
- the vertical plane 11 could be orthogonal to the travel direction of the trolley 3. This level is in FIG. 1 dashed lines.
- Equations 7 and 8 first show the characteristic eigenvalue of the pendulum oscillation, that is, the oscillation frequency f.
- the oscillation frequency f the characteristic eigenvalue of the pendulum oscillation.
- the first time derivative ⁇ of the pendulum angle ⁇ thus has a value different from zero.
- the goal of the prior art approaches is always to suppress or dampen oscillations.
- the pendulum movement during the process of the load suspension point 2 does not matter.
- the load 6 can therefore oscillate throughout the process of the load suspension point 2. All that is decisive is that at a destination to which the control device 7 the load suspension point 2 and thus (as far as the horizontal position is concerned) moves the load 6, the pendulum motion comes to a standstill again.
- the control device 7 In the context of the method, the control device 7 according to the FIG. 4 and 5 an initial cable length L0, a target cable length L1 to be reached at the destination and an initial deflection angle ⁇ 0 of the pendulum movement of the load 6 and / or an initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum motion.
- the initial values ⁇ 0 and ⁇ 0 can be used as be given absolute values. As a rule, they are given as relative quantities, ie in terms of amplitudes.
- a final value ⁇ 1 is known, which the deflection angle ⁇ should assume at the destination.
- the controller 7 is aware of a final value ⁇ 1, which the time derivative ⁇ of the deflection angle ⁇ is to assume at the destination.
- the end values ⁇ 1, ⁇ 1 can be known to the control device 7 as such, for example on the basis of the computer program 8.
- the end values ⁇ 1, ⁇ 1 of the control device 7 can be obtained, for example, from a user 12 of the crane 1 (see FIG 1 and 2 ).
- the final values ⁇ 1 and ⁇ 1 can be given as absolute values.
- control device 7 is further given the time course of the movement xK of the load suspension point 2.
- the control device 7 determines the time profile of the rope length L such that at the destination of the deflection angle ⁇ of the pendulum movement takes the defined final value ⁇ 1 and / or the time derivative ⁇ of the deflection angle ⁇ the defined final value ⁇ 1 assumes.
- the control device 7 sets the cable length L in accordance with the determined time profile of the cable length L.
- the time course of the movement xK of the load suspension point 2 is not specified.
- the control device 7 also determines the time course of the movement xK of the load suspension point 2 ⁇ of the pendulum movement assumes the defined final value ⁇ 1 and / or the time derivative ⁇ of the deflection angle ⁇ assumes the defined final value ⁇ 1 .
- the control device 7 moves the load suspension point 2 in accordance with the time course determined for the load suspension point 2 and continues to adjust the cable length L during the process of the load suspension point 2 in accordance with the time profile determined for the cable length L.
- the present invention is explained on the assumption that the defined final value ⁇ 1 of the deflection angle ⁇ of the pendulum motion is zero and also the defined final value ⁇ 1 of the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion is zero.
- the defined final values ⁇ 1, ⁇ 1 could also have other sizes.
- the defined final value ⁇ 1 of the deflection angle ⁇ of the pendulum motion could be zero and the defined final value ⁇ 1 of the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion could be maximal, ie have its maximum value and point in the same direction as that in which the travel movement of the load suspension point 2 is directed.
- Other values are possible.
- the load 6 may be formed as needed.
- the load 6 may be a spreader with or without a container received by the spreader.
- it may be, for example, a full or empty gripper act for handling bulk goods.
- Other embodiments of the load 6 are possible.
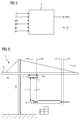
- the load suspension point 2 is at an initial location x0 at the time when the method according to the invention is carried out.
- the load suspension point 2 is already moved at a constant speed v.
- the speed v should be maintained until the load suspension point 2 reaches a location x1 (hereinafter referred to as a boundary location).
- the load suspension point 2 is to be decelerated to a standstill with a constant delay.
- the load suspension point 2 has come to a standstill, it will continue to travel to the destination x2.
- end values ⁇ 1, ⁇ 1 for the deflection angle ⁇ and the time derivative ⁇ of the deflection angle ⁇ zero is given in each case.
- the pendulum movement of the load 6 has an initial deflection angle ⁇ 0 and an initial time derivative ⁇ 0 of the deflection angle ⁇ .
- the initial rope length L0 at the initial location x0 shall also be given at the border location x1 and at the destination x2.
- the rope length L can be kept unchanged.
- the cable length L can therefore be shortened from the initial cable length L0 to an intermediate value or extended to another intermediate value at a change location x3, for example, so that the load 6 oscillates at a frequency which is greater or less than before.
- the rope length L is then set back to the initial rope length L0. The load 6 shuttles from the further change location x4 again with the same frequency as before the change location x3.
- the change locations x3 and x4 and the change of the rope length L can be selected as required. As a rule, it is only important to set the phase position of the pendulum motion accordingly. Preferably, as far as possible, the change locations x3 and x4 are set so that the rope length L is reduced while the load 6 is at an extreme of its pendulum motion and the rope length L is increased while the load 6 is in one Zero crossing of their pendulum motion is located.
- Example 2 is based on Example 1. The difference is that according to Example 2, the load 6 initially hangs without swinging under the stationary load suspension point 2. Then, the load 6 from the control device 7 by driving of the cat drive 3 'with a predetermined acceleration to the destination x2 to be accelerated until it reaches the constant speed v. Then, the controller 7 reduces the acceleration of the load suspension point 2 to zero.
- Example 2 The solution is completely analogous to Example 1. It only need to be determined by the equation of motion of the initial deflection angle ⁇ 0 the pendulum motion and the initial time derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement, which has the load 6, when the acceleration of the load suspension point 2 reduces to zero becomes. Furthermore, the associated initial location x0 must be determined.
- Example 3 is based on Example 1. The difference is that according to Example 3, the control device 7 is additionally given a rope speed with which the rope length L before the destination x2 - for example, from the border location x1 - is to be increased to a target rope length L1 (the load 6 are thus lowered should).
- Example 1 For the equation of motion is universal and also covers the case that the rope length L changes.
- the control device 7 determines on the basis of the time course of the movement of the load suspension point 2, the initial rope length L0 and the target rope length L1 another border location x1 '. From reaching the further border location x1 ', the control device 7 increases the rope length L with the rope speed to the target rope length L1.
- Example 4 is based on Example 2. The difference is that according to example 4, during the acceleration of the load suspension point 2 by driving the hoist 5 ', the control device 7 reduces the rope length L to the initial rope length L0. In this case, the control device 7 takes into account the reduction of the rope length L in the determination of the initial deflection angle ⁇ 0 of the pendulum movement and / or the initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement. Again, the consideration is readily possible because the equation of motion is universal.
- the load suspension point 2 is at the starting point x0 at the time when the method according to the invention is carried out.
- the load suspension point 2 is already moved at the constant speed v.
- the speed v should be maintained until the load suspension point 2 reaches a location x1 to be determined (hereinafter referred to again as a boundary location). Thereafter, the load suspension point 2 is to be decelerated to a standstill with a constant delay. Until the load suspension point 2 has come to a standstill, it will continue to travel to the destination x2.
- the rope length L should be maintained at its original value L0. From the limit location x1, the rope length L is to be increased from its original value L0 to a target rope length L1. The lengthening of the rope length L should take place between the border location x1 and the destination x2 with a constant rope speed.
- the control device 7 is therefore able to provisionally determine the border location x1 and to determine the pendulum state at the border location x1, starting from the initial location x0 and the pendulum state given there.
- the provisional determination of the border town x1 can be more or less arbitrary. For example, when setting the boundary location x1, it can be assumed that the deceleration of the load suspension point 2 and / or the cable speed vL assume their maximum values.
- control device 7 starting from the boundary location x1 taking into account the (negative) acceleration of the load suspension point 2 and the (positive) change of the rope length L to determine the pendulum state at the destination x2.
- the resulting pendulum state of the load 6 - ie its deflection angle ⁇ and its temporal change ⁇ - at the destination x2 of the predetermined, defined end values ⁇ 1, ⁇ 1 will be different.
- the control device 7 can therefore due to the resulting deviations the border location redetermine x1 and determine again for the newly determined border location x1 which pendulum state of the load 6 results at the destination x2.
- the correct border location x1 can be quickly determined by a few iterations.
- Example 6 is based on Example 5. The difference is that, according to example 6, the load 6 initially hangs below the stationary load suspension point 2 without oscillation. Then, the load 6 is to be accelerated by the control device 7 by driving the Katzantriebs 3 'with a predetermined acceleration to the destination x2 until it reaches the constant speed v. Then, the controller 7 reduces the acceleration of the load suspension point 2 to zero.
- Example 5 The solution is completely analogous to Example 5. It is only necessary to determine from the equation of motion the initial deflection angle ⁇ of the pendulum motion and the initial time derivative ⁇ of the deflection angle ⁇ of the pendulum movement which the load 6 has when the acceleration of the load suspension point 2 is reduced to zero , Furthermore, the associated initial location x0 must be determined.
- Example 7 is based on Example 6. The difference with example 6 is that according to example 7 the control device 7 reduces the rope length L to the initial rope length L0 during the acceleration of the load suspension point 2 by activating the hoist 5 '. In this case, the control device 7 takes into account the reduction of the rope length L in the determination of the initial deflection angle ⁇ 0 of the pendulum movement and / or the initial derivative ⁇ 0 of the deflection angle ⁇ of the pendulum movement. Again, the consideration is readily possible because the equation of motion is universal.
- control device 7 is able, in the case that the time course of the movement of the load suspension point 2 is given to determine the time course of the rope length L continuously - ie in real time. Likewise, the control device 7 in the case that the time course of the movement of the load suspension point 2 is not given, able to determine the time course of the movement of the load suspension point 2 and the time course of the rope length L continuously - ie in real time.
- a regulation is particularly useful if the start of the load suspension point 2 takes place manually from standstill and then transferred to an automated process to destination x2.
- the traversing movements of the load suspension point 2 and the determination of the rope length L can also be calculated using the equation of motion using mathematical optimization methods.
- a numerical algorithm searches for the best solution according to a predetermined optimization criterion (for example, time-optimal or energy-optimal) and taking into account boundary conditions such as maximum possible speeds and accelerations, obstacles to be avoided, and the like.
- the corresponding detection device 13 for detecting the pendulum state of the load 6, that is, data that is characteristic of the deflection angle ⁇ of the cable system 5 and / or at least a time derivative ⁇ of the deflection angle ⁇ - for example, the angular velocity or the angular acceleration - can be formed as needed be.
- data that is characteristic of the deflection angle ⁇ of the cable system 5 and / or at least a time derivative ⁇ of the deflection angle ⁇ - for example, the angular velocity or the angular acceleration -
- FIGS 1 and 2 By means of stationary cameras, images are acquired, by the evaluation of which the deflection angle ⁇ and / or its time derivative ⁇ can be determined.
- the control device 7 determines the time course of the rope length L, taking into account the changed movement of the load suspension point 2 new.
- the control device 7 determines the time profile of the cable length L such that the defined final value ⁇ 1, ⁇ 1 of the deflection angle ⁇ and the time derivative ⁇ of the deflection angle ⁇ are approximated as far as possible.
- the control device 7 determines in such a case, the time course of the rope length L such that the energy the unavoidable residual pendulum movement is as low as possible.
- the control means 7 are an initial rope length L0, a target rope length L1 to be reached at the destination x2 and an initial deflection angle ⁇ 0 of a pendulum movement which the load 6 moves during the process of the load suspension point 2 to the destination x2 in a vertical plane 11 containing the load suspension point 2 performs the load suspension point 2, and / or given an initial derivative ⁇ of the deflection angle ⁇ of the pendulum motion.
- the control device 7 determines at a given time course of the movement of the load suspension point 2 a time course of the rope length L and adjusts the rope length L according to the determined time course. The determination is made such that at the destination x2 the deflection angle ⁇ of the pendulum movement and / or the time derivative ⁇ of the deflection angle ⁇ of the pendulum motion assume a defined final value ⁇ 1, ⁇ 1 .
- the present invention has many advantages.
- the method according to the invention can be integrated directly into the crane control. All required system parameters and sensor information are known in the crane control. Above all, however, the traversing movement of the load suspension point 2 can be determined to a considerable extent independently of a pendulum movement of the load 6 caused thereby. An oscillation of the load 6 during the process of the load suspension point 2 can be accepted. It only has to be ensured that the desired pendulum state is reached at the end point of the movement of the load suspension point 2, that is to say at the destination x2. This can be achieved by adjusting the rope length L during the process of the load suspension point 2.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
Claims (13)
- Procédé de déplacement d'une charge (6) au moyen d'une grue (1), la charge (6) étant suspendue par un système (5) à câble de la grue (1) à un point (2) de suspension de la charge de la grue (1),- dans lequel un dispositif (7) de commande de la grue (1) déplace, en commandant un entraînement (3', 1'), le point (2) de suspension de la charge vers un emplacement (x2) cible,- dans lequel le dispositif (7) de commande règle pendant le déplacement du point (2) de suspension de la charge, une longueur (L) de câble du système (5) à câble en commandant un dispositif (5') de levage,- dans lequel on donne au dispositif (7) de commande une longueur (L0) initiale de câble, une longueur (L1) cible de câble à atteindre à l'emplacement (x2) cible ainsi qu'un angle (ϕ0) initial de déviation d'un mouvement oscillant que la charge exécute autour du point (2) de suspension de la charge dans un plan (11) vertical contenant le point (2) de suspension de la charge pendant le déplacement du point (2) de suspension de la charge vers l'emplacement (x2) cible et/ou une dérivée (ϕ'0) de l'angle (ϕ) de déviation du mouvement oscillant et- dans lequel le dispositif (7) de commande détermine et règle, pour une variation en fonction du temps donné du mouvement de déplacement du point (2) de suspension de charge, une variation en fonction du temps de la longueur (L) du câble de manière à ce qu'à l'emplacement (x2) cible, l'angle (ϕ) de déviation du mouvement oscillant et/ou une dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation du mouvement oscillant, prenne une valeur (ϕ1, ϕ'1) finale définie.
- Procédé suivant la revendication 1,
caractérisé en ce que la valeur (ϕ1) finale définie de l'angle (ϕ) de déviation du mouvement oscillant est nulle et/ou en ce que la valeur (ϕ' 1) finale définie de la dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation du mouvement oscillant est nulle ou maximale. - Procédé suivant la revendication 1 ou 2,
caractérisé- en ce qu'il est donné au dispositif (7) de commande, en outre, une vitesse du câble à laquelle la longueur (L) du câble doit être augmentée avant l'emplacement (x2) cible,- en ce que le dispositif (7) de commande détermine un emplacement (x1) limite à l'aide de la courbe en fonction du temps du mouvement de déplacement du point (2) de suspension de la charge, de la longueur (L0) initiale du câble, de la longueur (L1) cible du câble et de la vitesse du câble,- en ce que le dispositif (7) de commande augmente jusqu'à la longueur (L1) cible du câble, à la vitesse du câble, la longueur (L) du câble, à partir du moment où l'emplacement (x1) limite est atteint,- dans lequel le dispositif (7) de commande détermine, pour l'emplacement (x1) limite, une valeur intermédiaire de l'angle (ϕ) de déviation et/ou de la dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation à l'aide de la variation en fonction du temps du mouvement de déplacement du point (2) de suspension de la charge de l'emplacement (x1) limite au point (x2) cible, de la vitesse du câble, de la longueur (L1) cible du câble et de la valeur (ϕ'1) finale définie de l'angle (ϕ) de déviation et/ou de la valeur (ϕ'1) finale définie de la dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation, et- en ce que le dispositif (7) de commande détermine la courbe en fonction du temps de la longueur ( L) du câble jusqu'à ce que l'emplacement (x1) limite soit atteint à l'aide de la courbe en fonction du temps du mouvement de déplacement du point (2) de suspension de charge jusqu'à l'emplacement (x1) limite, de la longueur (L0) initiale du câble, de l'angle (ϕ0) initial de déviation du mouvement oscillant et/ou de la dérivée (ϕ'0 ) initiale de l'angle (ϕ) de déviation du mouvement oscillant, la courbe en fonction du temps de la longueur ( L) du câble jusqu'à ce que l'emplacement (x1) limite soit atteint, de manière à ce que, à l'emplacement (x1) limite, l'angle (ϕ) de déviation du mouvement oscillant et/ou la dérivée (ϕ') en fonction du temps de l'angle (ϕ ) de déviation du mouvement oscillant prenne la valeur intermédiaire déterminée. - Procédé suivant la revendication 1 ou 2,
caractérisé- en ce que le dispositif (7) de commande détermine un emplacement (x1) limite à l'aide de la courbe en fonction du temps du mouvement de déplacement du point (2) de suspension de la charge, de la longueur (L0) initiale du câble, de la longueur (L1) cible du câble, de l'angle (ϕ0) initial de déplacement du mouvement oscillant et/ou de la dérivée la dérivée (ϕ'0) initiale en fonction du temps de l'angle (ϕ) de déviation du mouvement oscillant,- en ce que le dispositif (7) de commande augmente, à partir de l'emplacement (x1) limite, la longueur (L) du câble soit à une vitesse moyenne du câble, soit à une vitesse du câble oscillant autour de la vitesse moyenne du câble,- en ce que la vitesse moyenne du câble est donnée par la différence entre la longueur (L1) cible du câble et la longueur (L0) initiale du câble, divisée par le temps nécessaire pour que le point (2) de suspension de charge se déplace de l'emplacement (x1) limite à l'emplacement (x2) cible,- en ce que le dispositif (7) de commande détermine l'emplacement (x1) limite de manière à ce qu'à l'emplacement (x2) cible, l'angle (ϕ) de déviation du mouvement oscillant et/ou la dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation du mouvement oscillant prenne la valeur (ϕ1, ϕ'1) finale définie. - Procédé suivant l'une des revendications précédentes,
caractérisé
en ce que la charge (6) pend d'abord en un emplacement (x0) initial du mouvement de déplacement du point (2) de suspension de la charge sans osciller sous le point (2) de suspension de la charge, en ce que le dispositif (7) de commande accélère le point (2) de suspension de la charge par commande de l'entraînement (3', 1') à partir de l'emplacement (x0) initial à une accélération déterminée à l'avance jusqu'à l'emplacement (x2) cible, jusqu'à ce que le point (2) de suspension de la charge se déplace à une vitesse (v) déterminée à l'avance, en ce que le dispositif (7) de commande, réduit alors à zéro l'accélération et en ce que le dispositif (7) de commande détermine l'angle (ϕ0) initial de déviation du mouvement oscillant et/ou la dérivée (ϕ'0) initiale de l'angle (ϕ) de déviation du mouvement oscillant, à l'aide de l'accélération déterminée auparavant et de la vitesse déterminée auparavant ainsi que de la longueur (L) du câble pendant l'accélération. - Procédé suivant la revendication 5,
caractérisé en ce que
le dispositif (7) de commande réduit pendant l'accélération du point (2) de suspension de la charge en commandant le dispositif (5') de levage, la longueur (L) du câble à la longueur (L0) initiale du câble et en ce que le dispositif (7) de commande prend en compte la réduction de la longueur (L) du câble lors de la détermination de l'angle (ϕ0) initial de déviation du mouvement oscillant et/ou la dérivée (ϕ'0) initiale de l'angle (ϕ) de déviation du mouvement oscillant. - Procédé suivant l'une des revendications précédentes,
caractérisé
en ce que le dispositif (7) de commande détecte, pendant le déplacement du point (2) de suspension de la charge en continu, l'angle (ϕ) de déviation du mouvement oscillant et/ou la dérivée (ϕ') en fonction du temps de l'angle (ϕ) de déviation du mouvement oscillant et en ce que le dispositif (7) de commande détermine, en continu, la courbe en fonction du temps de la longueur (L) du câble. - Procédé suivant l'une des revendications 1 à 7,
caractérisé en ce que
le point (2) de suspension de la charge peut être déplacé dans une direction de déplacement sur une flèche (4) de la grue (1) au moyen d'un pont roulant (3) et en ce que le plan (11) vertical, auquel est rapporté le mouvement oscillant de la charge (5), est parallèle à la direction de déplacement. - Procédé suivant l'une des revendications 1 à 7,
caractérisé en ce que
le point (2) de suspension de la charge peut être déplacé dans une direction de déplacement sur une flèche (4) de la grue (1) au moyen d'un pont roulant (3) en ce qu'en outre, la grue (1) peut être déplacée dans son ensemble orthogonalement à la direction de déplacement du pont roulant (3) et en ce que le plan (11) vertical, auquel est rapporté le mouvement oscillant de la charge (6), est orthogonal à la direction de déplacement. - Procédé suivant l'une des revendications précédentes,
caractérisé en ce que
la courbe en fonction du temps de mouvement de déplacement du point (2) de suspension de la charge est modifiée pendant le déplacement du point (2) de suspension de la charge et en ce que le dispositif (7) de commande redétermine la courbe en fonction du temps de la longueur (L) du câble en tenant compte de la modification du mouvement de déplacement du point (2) de suspension de la charge. - Programme d'ordinateur, le programme d'ordinateur comprenant un code (9) machine qui peut être exploité par un dispositif (7) de commande d'une grue (1), l'exploitation du code (9) machine par le dispositif (7) de commande faisant que le dispositif (7) de commande fait fonctionner la grue (1) selon un procédé suivant l'une des revendications précédentes.
- Dispositif de commande d'une grue (1), le dispositif de commande étant programmé par un programme (8) d'ordinateur suivant la revendication 11.
- Grue
dans laquelle la grue a un point (2) de suspension d'une charge auquel une charge (6) est suspendue par un système (5) de câble de la grue,- dans laquelle la grue a au moins un entraînement (3', 1') à l'aide duquel le point (2) de suspension de la charge peut être déplacé dans une direction de déplacement,- dans laquelle la grue a un dispositif (5') de levage à l'aide duquel une longueur (L) de câble du système (5) de câble peut être réglée,- dans laquelle la grue a un dispositif (7) de commande constitué suivant la revendication 12.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14181264.4A EP2987759B1 (fr) | 2014-08-18 | 2014-08-18 | Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14181264.4A EP2987759B1 (fr) | 2014-08-18 | 2014-08-18 | Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2987759A1 EP2987759A1 (fr) | 2016-02-24 |
| EP2987759B1 true EP2987759B1 (fr) | 2016-11-16 |
Family
ID=51383569
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14181264.4A Active EP2987759B1 (fr) | 2014-08-18 | 2014-08-18 | Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2987759B1 (fr) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10071804B1 (en) | 2015-09-28 | 2018-09-11 | Amazon Technologies, Inc. | Delivery drop rate modulation |
| US9969494B1 (en) * | 2015-09-28 | 2018-05-15 | Amazon Technologies, Inc. | Delivery drop platforms, tethers, and stabilization |
| CN107902555B (zh) * | 2017-11-13 | 2019-03-01 | 浙江大学 | 一种网格精细化的岸边集装箱起重机最优控制系统 |
| CN112320593B (zh) * | 2020-11-17 | 2023-10-27 | 四川宏升重工机械有限公司 | 一种塔吊用滑动防抖机构 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5414389B2 (fr) * | 1973-04-02 | 1979-06-06 | ||
| FR2698344B1 (fr) * | 1992-11-23 | 1994-12-30 | Telemecanique | Dispositif de régulation du transfert d'une charge suspendue. |
| DE102007041692A1 (de) * | 2007-09-03 | 2009-03-05 | Siemens Ag | Regelungseinrichtung zur Dämpfung von Pendelbewegungen einer seilgeführten Last |
| JP5293977B2 (ja) * | 2011-03-17 | 2013-09-18 | 富士電機株式会社 | クレーンの振れ止め制御方法及び振れ止め制御装置 |
-
2014
- 2014-08-18 EP EP14181264.4A patent/EP2987759B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2987759A1 (fr) | 2016-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3649072B1 (fr) | Grue et procédé de commande d'une telle grue | |
| EP2987759B1 (fr) | Grue ayant un mouvement oscillant défini pour atteindre un emplacement cible | |
| DE102015100669B4 (de) | Anti-pendel-steuerverfahren mit einstellbarer unterstützung für den transport einer schwebenden last | |
| DE60221232T2 (de) | Schwingungsminderungssteuerung eines krans unter bedienerbefehl | |
| EP3784616A1 (fr) | Grue et procédé pour commander une grue de ce type | |
| EP4013713B1 (fr) | Grue et procédé de commande d'une telle grue | |
| AT520008B1 (de) | Verfahren zum Dämpfen von Drehschwingungen eines Lastaufnahmeelements einer Hebeeinrichtung | |
| DE102012220035B4 (de) | Bewegungssystem, das ausgestaltet ist, um eine nutzlast zu bewegen | |
| WO2004031065A2 (fr) | Procede et dispositif de positionnement d'une charge | |
| EP3556969A1 (fr) | Pompe à béton | |
| EP2878566B1 (fr) | Procédé d'influence d'un mouvement d'une charge logée au niveau d'une grue | |
| DE102006015359B4 (de) | Betriebsverfahren für eine Anlage mit einem mechanisch bewegbaren Element sowie Datenträger und Steuereinrichtung zur Realisierung eines derartigen Betriebsverfahrens | |
| AT501509A1 (de) | Verfahren und positionsregelungseinrichtung zur steuerung des betriebes einer lasttragvorrichtung | |
| DE102016105658A1 (de) | Anhängerrücksetzhilfe durch geschwindigkeitsbegrenzung mittels bremsen | |
| EP3556968A1 (fr) | Pompe à béton | |
| DE102015208577A1 (de) | Verfahren zur Ansteuerung eines Knickmasts in einem Großmanipulator | |
| EP3873844B1 (fr) | Cheminement sans collision d'une charge suspendue à une corde | |
| EP4186847B1 (fr) | Planification de trajectoire avec fonctionnalité de replanification flexible - point d'extrémité modifié | |
| EP3293141A1 (fr) | Procede de fonctionnement d'une grue, en particulier une grue pour conteneurs | |
| EP2902356A1 (fr) | Grue avec amortissement actif des mouvements d'oscillation de la charge | |
| DE102005002192B4 (de) | Verfahren zum Betrieb einer Krananlage, insbesondere eines Containerkrans, sowie Krananlage, insbesondere Containerkran | |
| EP2977343B1 (fr) | Grue avec amortissement actif des mouvements d'oscillation de la charge | |
| DE102017106559A1 (de) | Auslegung oder Durchführung einer Bewegungsaufgabe einer bewegten Masse in einer mechanischen Anlage entlang zumindest einer Bewegungsachse | |
| DE19918449C2 (de) | Lasthebesystem zur Feinpositionierung und aktiven Schwingungsdämpfung | |
| DE3924256C2 (de) | Verfahren zur Unterdrückung von Pendelschwingungen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20150505 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160609 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 845702 Country of ref document: AT Kind code of ref document: T Effective date: 20161215 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014001970 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170217 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014001970 Country of ref document: DE |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: SIEMENS AKTIENGESELLSCHAFT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170216 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCOW Free format text: NEW ADDRESS: WERNER-VON-SIEMENS-STRASSE 1, 80333 MUENCHEN (DE) Ref country code: CH Ref legal event code: NV Representative=s name: SIEMENS SCHWEIZ AG, CH |
|
| 26N | No opposition filed |
Effective date: 20170817 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180430 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180818 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170316 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161116 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 845702 Country of ref document: AT Kind code of ref document: T Effective date: 20190818 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190818 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231019 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240805 Year of fee payment: 11 |