EP2674384B1 - Verfahren zur Überwachung der Kransicherheit sowie Kran - Google Patents
Verfahren zur Überwachung der Kransicherheit sowie Kran Download PDFInfo
- Publication number
- EP2674384B1 EP2674384B1 EP13002979.6A EP13002979A EP2674384B1 EP 2674384 B1 EP2674384 B1 EP 2674384B1 EP 13002979 A EP13002979 A EP 13002979A EP 2674384 B1 EP2674384 B1 EP 2674384B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- crane
- load
- bearing load
- accordance
- admissible
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
Definitions
- the invention relates to a method for monitoring the crane safety of a crane and a crane with a variable support base.
- the monitoring process is carried out automatically by an implemented crane control, in particular the load torque limitation of the crane. Monitoring events can indicate and possibly lead to intervention in the crane movement.
- load-bearing tables are calculated in advance for all the criteria mentioned, the table entries of which define the maximum permissible load-bearing capacities for specific crane configurations.
- the DE 10 2005 035 460 A1 suggests taking individual support points for certain crane states from the existing load capacity tables and using interpolation to determine the current maximum load capacity based on these support values.
- the certain permissible payload is subject to a certain inaccuracy, which may lead to a noticeable loss of the maximum payload.
- crane movements can only be carried out if they are within the permissible load range. However, if the crane has been driven into an inadmissible area, the load torque limiter interrupts the current crane movement and blocks all further crane movements.
- DE102005059768A1 discloses a method according to the preamble of claim 1 for operating a crane with a monitoring unit and a sensor system.
- the object of the present invention is to further develop a method known from the prior art for overload protection on cranes.
- a method for operating a crane with a monitoring unit is proposed, the monitoring unit calculating a permissible load which is dependent on one or more changeable parameters during crane operation.
- the method according to the invention does not require any or no complete payload table.
- the calculation is carried out during crane operation on the crane, preferably according to the method according to one of Claims 5 to 12.
- the current changeable parameter (s) are arbitrary.
- One or more parameters characterize, for example, the current crane configuration or executed crane movements or activities.
- the parameter can be a parameter relating to the position of the crane or a crane component.
- At least one parameter can be the boom length, the boom angle, the direct ballast radius and / or the angle of rotation the turntable act. As stated, these are examples; of course, other parameters are also conceivable.
- a sensor system that records the current changeable parameters during crane operation and makes them available to the monitoring unit. According to the invention it is provided that one or more sensor values are modified before the calculation of the permissible load. In this way it is possible to determine the permissible load for one or more future parameters.
- the method according to the invention consequently allows a predictive calculation of the possible permissible load for future crane movements.
- the crane's monitoring unit thus calculates in real time on the crane and at any time which permissible load capacities will occur in the near future if the current crane movements are continued.
- extensive prognoses can be made for the development of the future permissible load capacity depending on current and future crane activities. This procedure can be particularly necessary if there are no fixed limit values, i.e. load tables, for crane monitoring.
- the crane preferably always calculates, in parallel with the method according to one of claims 5 to 12, a forecast of how the permissible load will change if the current actual movement or currently possible crane movement is continued.
- the method according to the invention does not require a comprehensive expansion of an existing crane or a monitoring unit. Rather, minor modifications are sufficient to adapt existing systems for carrying out the method. Means for manipulating the recorded sensor values only need to be provided.
- the monitoring unit changes at least one parameter as a function of the calculated permissible load capacity during crane operation in order to control the permissible load capacity.
- the speed of the parameter change can be reduced or stopped continuously or in steps, before a parameter value is reached at which the permissible one Load corresponds to the actual load.
- the monitoring unit reacts as soon as the payload changes towards zero.
- a pending crane movement can be slowed down or stopped in good time in order to avoid exceeding the permissible load.
- an output or display of a possible overshoot or an approach to a possible overshoot to the crane operator can take place.
- the desired target movement of the crane is permitted, restricted or completely blocked.
- An essential feature here is the steepness of the change in the permissible load. This calculation is carried out using all relevant sensors.
- the reduction can take place continuously or in stages.
- the speed can be reduced, for example, in such a way that it is gradually reduced to zero when or before the correspondence between the permissible and actual payload is reached, from a value that is lower than the other rate of change, or that the value zero is reached by continuously reducing the speed.
- the speed of the parameter change from a difference between the actual and permissible payload, i.e. H. is reduced continuously or gradually over a certain remaining distance.
- This difference can assume a constant value or a value that depends on the actual and / or permissible load or the difference thereof or the ratio of this difference to the actual and / or permissible load.
- At least one sensor value is checked by targeted modification, which Parameter change or parameter changes lead to a decrease in the actual load capacity and / or an increase in the permissible load capacity if the crane is already in an impermissible operating range, ie the current load capacity exceeds or corresponds to a permissible load capacity.
- the method shows preferred crane movements that enable particularly fast and safe driving out of the prohibited area.
- any crane movement is stopped or limited as soon as the current payload exceeds or corresponds to the permissible payload.
- the crane operator is then given one or more possible parameter changes, i. H. Crane movements made available for selection in order to be able to safely and reliably move the crane out of the prohibited area.
- the crane preferably comprises a variable support base.
- the support base is determined from the extended or unfolded state of the support device.
- the monitoring unit monitors several safety criteria during crane operation to ensure crane safety.
- the individual safety criteria can relate, for example, to component strength, component loading and the stability of the crane.
- this includes tilting the crane in the load direction, tilting the crane in the counter-load direction, breaking the hoist rope, component strength of the boom system, wind speed, load limits of the undercarriage, strength of the load hook, slewing ring load, luffing cylinder strength, Strength of the mechanical connections as well as the intended angle of rotation of the superstructure with boom to be used during crane operation.
- Specified calculation examples for the monitoring of individual criteria are, for example, the small test load, the large test load, load breakdown, tilt angle, tilting backwards without a load and a total of far more than 30 criteria.
- Individual criteria can be specified in the corresponding DIN standard, for example.
- a criterion is dependent on at least one parameter relating to the crane configuration and / or crane movement during crane operation as soon as the actual crane configuration at the place of use or during crane operation has an influence on compliance with the criterion.
- this also includes every crane movement that has an influence on a corresponding criterion. For example the current boom positions, the support base, the uppercarriage rotation angle, etc.
- At least one specific limit value represents the permissible specific load capacity up to which a corresponding criterion is complied with and crane safety is not endangered.
- the individual specific limit values or permissible specific load capacities can be monitored separately during crane operation and compared with the actual crane condition values. Alternatively or additionally, it can be advantageous to determine a common permissible load from the individual permissible specific limit values or loads. In this case a common maximum permissible load is determined for each crane condition or crane configuration.
- the maximum possible load capacity results in every situation, which results from the criteria for the current situation.
- the criteria that are no longer precalculated are calculated on the crane during runtime, that is, during crane operation.
- the execution of the method according to the invention now leads to a method or a monitoring device that can use any support base, d. H. allows any position of the support bars and is monitored at the same time. So far, any position was mechanically possible, but this was not safeguarded by the monitoring device for every case.
- the individual criteria are divided into at least two different types of criteria for the calculation of the joint permissible load.
- the individual criteria are divided into linearly dependent and linearly independent types of criteria.
- Linearly dependent preferably means that such a criterion depends on at least one further criterion.
- at least one linearly dependent criterion can be dependent on at least one calculated specific limit value / load capacity of at least one further linearly dependent and / or linearly independent criterion.
- a particularly advantageous embodiment of the method results from the fact that in a first step the permissible specific load is calculated for each linearly independent criterion. From the amount of specific loads for the linearly independent criteria, the minimum of these loads is then determined. The permissible load of the linearly dependent criteria is determined by iteration. It is conceivable that the iteration with the minimum of the permissible Loads of the linearly independent criteria begins and a minimum of the loads of the linearly dependent criteria is determined, which at the same time corresponds to the common permissible load for the crane.
- the stored load capacity tables are, however, exclusively those which are not dependent on a parameter relating to the crane configuration and / or crane movement during crane operation.
- all criteria that are dependent on at least one parameter relating to the crane configuration during crane operation are excluded. Consequently, mainly strength-relevant load capacity restrictions are stored on the crane as precalculated load capacity tables. These contain limit values, compliance with which avoids lasting damage to the crane through mechanical overload, for example through load acceptance.
- an integrated crane operation planner is used for diverse crane monitoring during crane operation.
- the crane planner preferably uses stored limit curves or envelope curves for at least some of the crane parameters. Accordingly, there are two independent crane monitoring methods, on the one hand to ensure the redundancy of the monitoring and on the other hand to check the functionality of the overall system in each case by the two monitoring methods provided independently of one another checking the functionality of the other monitoring method. In this context, the DE 10 2008 021 627 taken.
- the invention also relates to a crane with a monitoring unit and a sensor system.
- the crane carries out the above-described method according to the invention or an advantageous embodiment of the method according to the invention.
- the advantages and properties of the crane obviously correspond to those of the method according to the invention, which is why a renewed description is dispensed with at this point.
- the invention also relates to a crane monitoring unit, in particular a load torque limiter, for the aforementioned crane for carrying out the method according to the invention or an advantageous embodiment of the Procedure.
- Another aspect of the invention relates to a data carrier with stored software for execution on the aforementioned crane monitoring unit, comprising commands that cause the aforementioned crane to carry out the method steps according to the invention.
- the advantages and properties of the crane monitoring unit or the data carrier obviously correspond to those of the method according to the invention, which is why a repetitive description is dispensed with here too.
- the Figures 1 to 8 show the distribution of the permissible load capacity of a crane as a function of its radius or the slewing angle of the superstructure.
- the crane sketched in the center comprises an undercarriage, an uppercarriage rotatably mounted on the undercarriage and a variable support.
- the variable support comprises a total of four sliding bars that can be extended into different support positions.
- a luffing crane boom that can be telescoped is arranged on the superstructure can be designed.
- the current load depends on the rotation angle of the superstructure and the load radius, ie the luffing angle of the boom.
- a monitoring device on the crane monitors compliance with the permissible load capacity during crane operation.
- any desired position of the support bars is not only permitted by the method according to the invention but also monitored by the monitoring device at the same time.
- the criteria are divided into different, ie at least two different types of calculation.
- a linearly independent calculation type applies to the calculation of the large test load.
- the tipping load represents the load at which the crane tilts.
- Hdyn characterizes the dynamic lifting load coefficient.
- W introduces the wind influence into the calculation, which is calculated taking the load into account.
- the small test load is therefore dependent on the calculated load capacity of at least one criterion, which is referred to as linearly dependent. It is also conceivable that the calculation is recursive. For the calculation of the wind influence, for example, 1.2 m 2 of wind attack area per 1 t of load is assumed.
- the algorithm for the calculation divides the criteria into linearly dependent and linearly independent criteria.
- the permissible load is determined for each linearly independent criterion.
- the minimum of these TL criteriaA of these payloads is determined and recorded.
- a second method step an iteration of the permissible load capacity is carried out with the previously determined minimum TL CriteriaA as the starting value.
- the linearly dependent criterion is checked for admissibility in each step. If the criterion is admissible, the next criterion is used. As soon as a criterion is no longer permissible, the next iteration step in jumped to the relevant criterion without carrying out a further check of the other criteria.
- the second step is started again with this new load TL. This continues until the second step provides a permissible load TL CriteriaB for all criteria. This becomes the permissible maximum load TL.
- the method according to the invention is intended to provide the largest possible value for the permissible load TL.
- the determination of the load TL can also be carried out with the help of the continued bisection.
- the scale on the right edge of the image assigns the corresponding load values to the gray values.
- the crane configurations of the Figures 1 and 5 , 2 and 6 , 3 and 7th such as 4th and 8th are identical in each case and are used for comparison.
- three telescopic sections of the boom system are 46% extended.
- the sliding bars of the support are in the crane configuration according to Figures 1 and 5 fully extended and allow a maximum support base.
- the configuration of the Figures 2 and 6 provides, on the other hand, to operate the crane without support and to leave the sliding bars fully retracted.
- the crane according to the Figures 3 and 7th works with limited support, whereby two sliding bars on one side of the crane are fully extended and the opposite bars are fully retracted.
- the crane configuration of the Figures 4 and 8th provides a crane operation with three fully extended and one retracted sliding beam.
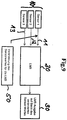
- the illustrated system of Figure 9 shows a load moment limiter 20 which monitors all crane movements with regard to their safety during crane operation and, if necessary, triggers a safety shutdown or restriction of the permissible crane movement.
- This system can according to the embodiment described above Figures 5 to 8 be carried out and carry out the presented method according to the invention.
- the following method represents an extension of this method. However, this is not a mandatory requirement for the execution of the following method steps, which are independent of the method according to the Figures 5 to 8 are executable.
- the load torque limiter 20 receives measured values from a large number of sensors 10 during crane operation, which values characterize individual parameters during crane operation. It should be noted that Figure 9 shows a number of three sensors merely by way of example. In a realistic environment, however, the system is based on a large number of sensors, the number of which is not limited.
- the individual measured values of the sensors 10 characterize, for example, the angle of rotation, luffing angle or also cylinder pressure of the luffing cylinder of the crane;
- the load moment limiter calculates the permissible load for the current crane condition.
- the permissible range is characterized by the fact that the current load capacity of the crane is lower than the permissible load capacity in the current operating state. If the current load exceeds the permissible value, the crane is working in the non-permissible range.
- the aim of the method according to the invention is to ensure that the load torque limitation triggers an early braking of the crane movement before entering a non-permissible work area.
- a restricted crane movement in the non-permissible range is to be made possible under certain circumstances and the safety of the crane is nevertheless to be monitored by means of the load moment limitation.
- the sensor values 11, 12, 13 for the calculation of the forecast of the permissible payload are specifically changed in suitably selected steps.
- the sensor value 11 of the sensor 1 is manipulated in order to be able to calculate the permissible load for this future parameter, ie the future actual value of the sensor 1.
- the load moment limiter 20 calculates the permissibility of the crane movement for the changed sensor values and can therefore estimate when the crane will be steered into a non-permissible range while maintaining the current crane movement.
- Each existing system of sensors 10 and load torque limiter 20 can be expanded by integrating the means 50 in order to be able to carry out a targeted manipulation of at least one sensor value 11.
- the load moment limiter 20 thus calculates in real time on the crane and at any time which permissible loads will occur in the near future if the current crane movement is continued. With the help of the forecast development of the payload, the load torque limiter can recognize at an early stage whether the permissible payload converges to the value zero. In this case, the crane movement can be slowed down or stopped completely in good time. It is also possible to issue a corresponding warning to the crane operator.
- the method according to the invention enables a restricted crane movement in the non-permissible range, which simultaneously from the load torque limiter 20 is monitored.
- the load torque limiter 20 has the task of stopping a crane movement well before actual malfunctions or an accident occur. Operation in the non-permissible range does not mean an acute dangerous situation, but merely the exceeding of a specially defined limit value.
- the flow chart of the Figure 10 shows the method according to the invention for checking permissible crane movements in the non-permissible range.
- the state 200 characterizes the regular crane operation, the crane movement is carried out unhindered in method step 110 and continuously monitored by the load torque limiter 20 in block 120 for compliance with the permissible load.
- the crane movement can be slowed down or stopped completely in good time. If such an emergency stop has taken place, the load torque limiter 20 goes to method step 200.
- the load torque limiter 20 goes to method step 200.
- it is determined with which crane movements or movements the crane can safely be driven out of the non-permissible area again.
- a possible selection is also displayed to the operator. The crane operator can therefore choose the most favorable variant depending on the situation.
- step 300 the release of the selected crane movement is checked. This ensures that only the crane movements released by the load torque limiter and displayed in step 200 are carried out and other crane movements are blocked.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Jib Cranes (AREA)
- Control And Safety Of Cranes (AREA)
Description
- Die Erfindung betrifft ein Verfahren zur Überwachung der Kransicherheit eines Krans sowie einen Kran mit einer variablen Abstützbasis.
- Es ist bekannt, die Kransicherheit mittels einer Kransteuerung während des Kranbetriebes zu überwachen. Die Gewährleistung der Kransicherheit basiert auf der Einhaltung diverser Sicherheitskriterien. Als mögliche Sicherheitskriterien werden beispielhaft die Bauteilfestigkeit von Auslegersystemen, Hubseilen, Lasthaken, Drehkranz, Wippzylinder, mechanischen Verbindungen etc. einerseits und die Standsicherheit des Krans andererseits genannt. Die Standsicherheit des Krans betreffende Kriterien sind beispielsweise das Kippen des Krans in Lastrichtung, Kippen des Krans in Gegenlastrichtung, Windgeschwindigkeit, der geplante Oberwagendrehwinkel etc. Zu jedem dieser Kriterien sind zulässige Grenzwerte bestimmbar, die für die Gewährleistung der Kransicherheit während des Kranbetriebs gesondert auf Einhaltung überwacht werden müssen.
- Der Überwachungsprozess wird durch eine implementierte Kransteuerung, insbesondere der Lastmomentbegrenzung des Krans, automatisiert ausgeführt. Überwachungsereignisse können anzeigt und gegebenenfalls zum Eingriff in die Kranbewegung führen.
- Bei der Herstellung und Prüfung des Krans werden vorab für alle genannten Kriterien sogenannte Traglasttabellen errechnet, deren Tabelleneinträge für konkrete Krankonfigurationen maximal zulässige Traglasten definieren.
- In der Regel wird ein Kran abgestützt betrieben, wobei die Größe der Abstützbasis abhängig von dem Ausschiebezustand bzw. Ausklappzustand der Schiebe- bzw. Klappholme der Abstützvorrichtung ist. Falls eine symmetrische Abstützung aufstellortbedingt unmöglich ist, schlägt die
EP 0 779 238 B1 vor, die gesamte Abstützbasis auf den kleinsten vorhandenen Ausschiebezustand bzw. Ausklappzustand zu reduzieren. Nachteilig geht bei dieser Vorgehensweise in weiten Teilen des Oberwagendrehwinkels tatsächlich vorhandene Traglast verloren. Zudem ist in dieser Ausführungsform die Position der Schiebe- bzw. Klappholme auf vorgegebene konkrete Stellungen begrenzt, da der Kranbetrieb nur für eine begrenzte Anzahl von Abstützstellungen zulässig ist. - Eine alternative Lösung schlägt die
EP 0 779 238 B1 vor. Diese legt einzelne Drehwinkelbereiche für den Oberwagen fest und gibt für jeden Bereich eine einheitliche maximale Traglast vor. Diese bestimmte maximale Traglast entspricht jeweils der kleinsten in den einzelnen Bereichen zulässigen Traglast. Auch bei dieser Lösung geht aufgrund des Sprunges zwischen den Drehwinkelbereichen tatsächlich vorhandene Traglast verloren. - Aus der
DE 20 2006 017 730 U1 ist ein alternativer Ansatz bekannt. Die vorgenannten Sicherheitskriterien werden nicht mehr ausschließlich anhand von vorgerechneten und abgespeicherten Traglasttabellen überwacht, sondern ein Teil dieser Kriterien wird auch einzeln gegenüber der aktuell auf dem Kran vorliegenden Werte überwacht. Hierdurch wird eine gewisse Diversität in der Kranüberwachung erzielt, jedoch kann aufgrund des Rückgriffs auf einzelne Traglasttabellen die maximal mögliche Traglast nicht ausgeschöpft werden. - Die
DE 10 2005 035 460 A1 schlägt vor, aus den vorhandenen Traglasttabellen für bestimmte Kranzustände einzelne Stützstellen herauszunehmen und basierend auf diesen Stützwerten mittels Interpolation die aktuell vorliegende maximale Traglast zu ermitteln. Auch hier unterliegt die bestimmte zulässige Traglast einer gewissen Ungenauigkeit, was gegebenenfalls zu einem spürbaren Verlust von maximaler Traglast führt. - Den aus dem Stand der Technik bekannten Ausführungsvarianten ist es gemein, dass stets auf vorberechnete Traglasttabellen zurückgegriffen wird. Eine variable Krankonfiguration, insbesondere eine variable Abstützbasis, führt jedoch zu einer unendlichen Anzahl von möglichen Krankonfigurationen und entsprechenden Traglasttabellen. Es ist wünschenswert, die Krankonfiguration insbesondere am Einsatzort möglichst flexibel gestalten zu können.
- Bekannte Krane werden derart betrieben, dass die Parameter soweit verändert werden dürfen, bis die zulässige Traglast der tatsächlichen Traglast entspricht oder diese überschreitet. Die Kransteuerung soll das Hineinfahren des Krans in einen unzulässigen Bereich vermeiden und unterbindet weitere Kranbewegungen, die zur Grenzüberschreitung führen würden. Die zulässige Traglast wird jeweils anhand der hinterlegten Traglasttabellen bestimmt. Weicht man jedoch von der üblichen Praxis mit vorberechneten Traglasttabellen ab, fehlen diese notwendigen festen Grenzwerte und es lassen sich auch keine festen Eingriffsgrenzen und Warngrenzen definieren.
- Wird diese Grenze nun doch während des Kranbetriebes überschritten, möglicherweise aufgrund umschlagender Wetterbedingungen, so befindet sich der Kran im unzulässigen Arbeitsbereich. Zur Reduzierung der davon ausgehenden Gefahren erfolgt ein Eingriff der Lastmomentbegrenzung in die Kransteuerung, der bis zur vollständigen Blockade sämtlicher Kranbewegungen führen kann.
- Bisher war ein sogenannter Schlüsselschalter vorgesehen, welcher das Ausführen von Kranbewegungen ohne oder nur mit teilweise aktiver Lastmomentbegrenzung ermöglichte. Nützlich war diese Funktion zum Herstellen der Arbeitsbereitschaft des Krans oder auch zum Herausfahren aus einem nicht zulässigen Arbeitsbereich, wenn beispielsweise die Lastmomentbegrenzung eine Kranbewegung gestoppt hat.
- Wird nun ein Schlüsselschalter nicht mehr eingebaut, können Kranbewegungen nur dann ausgeführt werden, wenn diese im zulässigen Traglastbereich erfolgen. Ist der Kran aber in einen nicht zulässigen Bereich gefahren worden, so unterbricht die Lastmomentbegrenzung die aktuelle Kranbewegung und blockiert alle weiteren Kranbewegungen.
-
DE102005059768A1 offenbart ein Verfahren gemäß dem Oberbegriff des Anspruchs 1 zum Betreiben eines Krans mit einer Überwachungseinheit und einer Sensorik. - Die Aufgabe der vorliegenden Erfindung besteht darin, ein aus dem Stand der Technik bekanntes Verfahren zur Überlastsicherung an Kranen weiterzuentwickeln.
- Diese Aufgabe wird durch ein Verfahren gemäß den Merkmalen des Anspruchs 1 gelöst. Weitere vorteilhafte Ausführungen des Verfahrens sind Gegenstand der nachfolgenden abhängigen Ansprüche.
- Gemäß Anspruch 1 wird ein Verfahren zum Betreiben eines Krans mit einer Überwachungseinheit vorgeschlagen, wobei die Überwachungseinheit eine von einem oder mehreren veränderbaren Parametern abhängige zulässige Traglast während des Kranbetriebs berechnet. Das erfindungsgemäße Verfahren setzt keine oder keine vollständige Traglasttabelle voraus. Die Berechnung erfolgt während des Kranbetriebs auf dem Kran bevorzugt gemäß dem Verfahren nach einem der Ansprüche 5 bis 12.
- Der oder die aktuellen veränderbaren Parameter sind beliebig. Ein oder mehrere Parameter charakterisieren beispielsweise die aktuelle Krankonfiguration oder ausgeführte Kranbewegungen bzw. -aktivitäten. Bei dem Parameter kann es sich um einen die Position des Krans oder eines Kranbauteils betreffenden Parameter handeln.
- Bei wenigstens einem Parameter kann es sich um die Auslegerlänge, den Auslegerwinkel, den Direktballastradius und bzw. oder den Drehwinkel der Drehbühne handeln. Es handelt sich, wie ausgeführt, hierbei um Beispiele, selbstverständlich sind auch andere Parameter denkbar.
- Zudem ist eine Sensorik vorgesehen, die die aktuellen veränderbaren Parameter während des Kranbetriebs erfasst und der Überwachungseinheit zur Verfügung stellt. Erfindungsgemäß ist es vorgesehen, dass ein oder mehrere Sensorwerte vor der Berechnung der zulässigen Traglast modifiziert werden. Auf diese Weise ist es möglich, die zulässige Traglast für ein oder mehrere zukünftige Parameter zu bestimmen.
- Das erfindungsgemäße Verfahren erlaubt folglich eine vorausschauende Berechnung der möglichen zulässigen Traglast für zukünftige Kranbewegungen. Die Überwachungseinheit des Krans berechnet also in Echtzeit auf dem Kran und zu jeder Zeit, welche zulässigen Traglasten bei Fortführung der aktuell ausgeführten Kranbewegungen in naher Zukunft auftreten werden. Weitergehend lassen sich umfangreiche Prognosen für die Entwicklung der zukünftigen zulässigen Traglast in Abhängigkeit aktueller und zukünftiger Kranaktivitäten anstellen. Diese Vorgehensweise kann insbesondere dann notwendig sein, wenn keine festen Grenzwerte, d.h. Traglasttabellen, für die Kranüberwachung existieren. Vorzugsweise rechnet der Kran stets parallel zum Verfahren gemäß einem der Ansprüche 5 bis 12 eine Vorausschau, wie sich die zulässige Traglast verändert, wenn die aktuelle Ist-Bewegung bzw. aktuell mögliche Kranbewegung weiter ausgeführt wird.
- Das erfindungsgemäße Verfahren erfordert keine umfassende Erweiterung eines bestehenden Krans bzw. einer Überwachungseinheit. Vielmehr sind geringfügige Modifikationen ausreichend, um bestehende Systeme für die Ausführung des Verfahrens anzupassen. Es sind lediglich Mittel zur Manipulation der erfassten Sensorwerte vorzusehen.
- Besonders vorteilhaft ist es, wenn die Überwachungseinheit in Abhängigkeit der berechneten zulässigen Traglast wenigstens einen Parameter während des Kranbetriebs verändert, um die zulässige Traglast zu kontrollieren. Beispielsweise lässt sich die Geschwindigkeit der Parameterveränderung kontinuierlich oder stufenweise verringern bzw. stoppen, bevor ein Parameterwert erreicht wird, bei dem die zulässige Traglast der tatsächlichen Traglast entspricht. Damit reagiert die Überwachungseinheit, sobald sich die Traglast in Richtung null verändert. Eine anhängige Kranbewegung kann rechtzeitig verlangsamt bzw. gestoppt werden, um ein Überschreiten der zulässigen Traglast zu vermeiden. Alternativ oder zusätzlich kann eine Ausgabe bzw. Anzeige einer möglichen Überschreitung bzw. einer Annäherung an eine mögliche Überschreitung an den Kranbediener erfolgen.
- Je nach Ergebnis der Vorausschau wird die gewünschte Sollbewegung des Krans zugelassen, eingeschränkt oder vollständig blockiert. Ein wesentliches Merkmal hierbei ist die Steilheit der Veränderung der zulässigen Traglast. Diese Berechnung erfolgt über alle relevanten Sensoren.
- Die Verringerung kann kontinuierlich erfolgen oder auch stufenweise. Die Verringerung der Geschwindigkeit kann zum Beispiel derart erfolgen, dass diese beim oder vor dem Erreichen der Übereinstimmung zwischen zulässiger und tatsächlicher Traglast von einem gegenüber der sonstigen Veränderungsgeschwindigkeit verringerten Wert gestuft auf null verringert wird oder dass der Wert null durch kontinuierliche Verringerung der Geschwindigkeit erreicht wird.
- Es kann vorgesehen sein, dass die Geschwindigkeit der Parameterveränderung ab einer Differenz zwischen tatsächlicher und zulässiger Traglast, d. h. über einen bestimmten Restweg kontinuierlich oder stufenweise verringert wird.
- Diese Differenz kann einen konstanten Wert annehmen oder einen Wert, der von der tatsächlichen und bzw. oder zulässigen Traglast oder deren Differenz oder dem Verhältnis dieser Differenz zu der tatsächlichen und bzw. oder zulässigen Traglast abhängt.
- Besonders vorteilhaft ist es, wenn die Veränderung des oder der Parameter derart vorgenommen wird, dass die tatsächliche Traglast die zulässige Traglast nicht übersteigen kann.
- Erfindungsgemäß ist vorgesehen, dass durch gezielte Modifikation wenigstens eines Sensorwertes geprüft wird, welche Parameteränderung bzw. Parameteränderungen zu einer Abnahme der tatsächlichen Traglast und/oder zu einer Zunahme der zulässigen Traglast führen, wenn der Kran sich bereits in einem unzulässigen Betriebsbereich befindet, d. h. die aktuelle Traglast eine zulässige Traglast überschreitet bzw. dieser entspricht. Das Verfahren zeigt bevorzugte Kranbewegungen auf, die ein besonders schnelles und sicheres Herausfahren aus dem nicht zulässigen Bereich ermöglichen.
- Erfindungsgemäß wird jegliche Kranbewegung gestoppt bzw. begrenzt, sobald die aktuelle Traglast die zulässige Traglast übersteigt bzw. dieser entspricht. Nachfolgend werden dem Kranbediener ein oder mehrere mögliche Parameteränderungen, d. h. Kranbewegungen zur Auswahl gestellt, um den Kran sicher und zuverlässig aus dem nicht zulässigen Bereich herausfahren zu können.
- Es kann ausreichend sein, dem Kranbediener eine mögliche Parameteränderung anzuzeigen. Besser ist es jedoch, dem Bediener eine Auswahl an möglichen Parameteränderungen zur Verfügung zu stellen.
- Zudem ist es zweckmäßig, nur die Parameteränderungen durch die Kransteuerung freizugeben, die ein möglichst sicheres und schnelles Herausfahren aus dem nicht zulässigen Betriebsbereich ermöglichen. Übrige Kranbewegungen bzw. Parameteränderungen werden begrenzt oder vollständig blockiert.
- Bevorzugt umfasst der Kran eine variable Abstützbasis. Die Abstützbasis bestimmt sich aus dem Ausfahr- bzw. Ausklappzustand der Abstützvorrichtung. Die Überwachungseinheit überwacht mehrere Sicherheitskriterien während des Kranbetriebs zur Gewährleistung der Kransicherheit.
- Die einzelnen Sicherheitskriterien können beispielsweise die Bauteilfestigkeit, Bauteilbelastung sowie die Standsicherheit des Krans betreffen. Insbesondere fallen hierunter das Kippen des Krans in Lastrichtung, Kippen des Krans in Gegenlastrichtung, Reißen des Hubseils, Bauteilfestigkeit des Auslegersystems, Windgeschwindigkeit, Lastgrenzen des Unterwagens, Festigkeit des Lasthakens, Drehkranzbelastung, Wippzylinderfestigkeit, Festigkeit der mechanischen Verbindungen sowie der beabsichtigte zu verwendende Drehwinkel des Oberwagens mit Ausleger während des Kraneinsatzes.
- Konkretisierte Berechnungsbeispiele für die Überwachung einzelne Kriterien sind beispielsweise die kleine Prüflast, die große Prüflast, Lastabriss, Kippwinkel, Kippen nach hinten ohne Last sowie insgesamt weit mehr als 30 Kriterien. Einzelne Kriterien können beispielsweise in entsprechender DIN-Norm spezifiziert sein.
- Bevorzugt ist nun vorgesehen, dass die Überwachungseinheit für jedes Kriterium, das von wenigstens einem die Krankonfiguration und/oder Kranbewegung während des Kranbetriebs betreffenden Parameter abhängig ist, ein zulässiger spezifischer Grenzwert während des Kranbetriebs berechnet wird. Es wird demnach vollständig auf die Berücksichtigung einer Traglasttabelle für entsprechende Kriterien verzichtet.
- Ein Kriterium ist von wenigstens einem die Krankonfiguration und/oder Kranbewegung während des Kranbetriebs betreffenden Parameter abhängig, sobald die tatsächliche Krankonfiguration am Einsatzort bzw. während des Kranbetriebs Einfluss auf die Einhaltung des Kriteriums hat. Hierunter fällt neben der Rüstkonfiguration auch jede Kranbewegung, die Einfluss auf ein entsprechendes Kriterium hat. Beispielsweise die aktuelle Auslegerstellungen, die Abstützbasis, der Oberwagendrehwinkel etc..
- Wenigstens ein spezifischer Grenzwert stellt die zulässige spezifische Traglast dar, bis zu der ein entsprechendes Kriterium eingehalten und die Kransicherheit nicht gefährdet wird.
- Die einzelnen spezifischen Grenzwerte bzw. zulässigen spezifischen Traglasten können getrennt während des Kranbetriebs überwacht werden und mit den tatsächlich vorliegenden Kranzustandswerten verglichen werden. Alternativ oder zusätzlich kann es vorteilhaft sein, aus den einzelnen zulässigen spezifischen Grenzwerten bzw. Traglasten eine gemeinsame zulässige Traglast zu ermitteln. In diesem Fall wird für jeden Kranzustand bzw. Krankonfiguration eine gemeinsame maximal zulässige Traglast bestimmt.
- Durch das Rechnen der Kriterien auf dem Kran ergibt sich in jeder Situation die maximal mögliche Traglast, die sich aus den Kriterien für die aktuelle Situation ergeben. Dies ist der herausragende Vorteil gegenüber vorgerechneten Tabellen, die immer ein Minimum über bestimmte Dimensionen darstellen und die mögliche Traglast des Krans niemals vollständig ausschöpfen können. Die nicht mehr vorgerechneten Kriterien werden erfindungsgemäß zur Laufzeit, also während des Kranbetriebes, auf dem Kran gerechnet. Die erfindungsgemäße Ausführung des Verfahrens führt nunmehr zu einem Verfahren bzw. einer Überwachungseinrichtung, die eine beliebige Abstützbasis, d. h. eine beliebige Stellung der Abstützholme zulässt und gleichzeitig überwacht. Bisher war zwar eine beliebige Stellung mechanisch möglich, jedoch wurde diese nicht für jeden Fall von der Überwachungseinrichtung abgesichert.
- Es kann zweckmäßig sein, dass für die Berechnung der gemeinsamen zulässigen Traglast die einzelnen Kriterien in wenigstens zwei unterschiedliche Kriterienarten aufgeteilt werden. Beispielsweise werden die einzelnen Kriterien in linear abhängige sowie linear unabhängige Kriterienarten aufgeteilt. Linear abhängig bedeutet vorzugsweise, dass ein derartiges Kriterium von wenigstens einem weiteren Kriterium abhängt. Insbesondere kann wenigstens ein linear abhängiges Kriterium von wenigstens einem berechneten spezifischen Grenzwert/Traglast wenigstens eines weiteren linear abhängigen und/oder linear unabhängigen Kriteriums abhängig sein.
- Eine besonders vorteilhafte Ausführungsform des Verfahrens ergibt sich dadurch, dass in einem ersten Schritt für jedes linear unabhängige Kriterium die zulässige spezifische Traglast berechnet wird. Aus der Menge der spezifischen Traglasten für die linear unabhängigen Kriterien wird im Anschluss das Minimum dieser Traglasten bestimmt. Die zulässige Traglast der linear abhängigen Kriterien wird mittels Iteration ermittelt. Denkbar ist es, dass die Iteration mit dem Minimum der zulässigen Traglasten der linear unabhängigen Kriterien beginnt und ein Minimum der Traglasten der linear abhängigen Kriterien ermittelt, was zugleich der gemeinsamen zulässigen Traglast für den Kran entspricht.
- Zur Beschleunigung des Verfahrens für die Ermittlung der zulässigen Traglast kann beispielsweise auf die Sektion, insbesondere fortgesetzte Bisektion, gesetzt werden. Hierdurch lässt sich die Berechnungszeit für die Ermittlung der zulässigen Traglast verringern.
- Es besteht die Möglichkeit, zusätzlich zum erfindungsgemäßen Verfahren ein oder mehrere Traglasttabellen in einer Speichereinheit des Krans zu hinterlegen und für die Überwachung des Krans zu berücksichtigen. Bei den gespeicherten Traglasttabellen handelt es sich jedoch ausschließlich um solche, die nicht von einem die Krankonfiguration und/oder Kranbewegung während des Kranbetriebes betreffenden Parameter abhängig sind. Bei der Erstellung der Traglasttabellen werden alle Kriterien, die von wenigstens einem die Krankonfiguration während des Kranbetriebs betreffenden Parameter abhängig sind, ausgeschlossen. Folglich werden hauptsächlich festigkeitsrelevante Traglastbeschränkungen auf dem Kran als vorgerechnete Traglasttabellen hinterlegt. Diese beinhalten Grenzwerte, deren Einhaltung eine nachhaltige Schädigung des Krans durch mechanisches Überlasten, beispielsweise durch Lastaufnahme, vermeidet.
- Zusätzlich kann vorgesehen sein, dass ein integrierter Kraneinsatzplaner für die diversitäre Kranüberwachung während des Kranbetriebes genutzt wird. Der Kranplaner verwendet vorzugsweise hinterlegte Grenzkurven bzw. Hüllkurven für zumindest einen Teil der Kranparameter. Es existieren demnach zwei unabhängige Kranüberwachungsverfahren, um einerseits die Redundanz der Überwachung zu gewährleisten und zum anderen jeweils die Funktionsfähigkeit des Gesamtsystems zu überprüfen, indem die beiden unabhängig voneinander vorgesehenen Überwachungsverfahren die Funktionsfähigkeit des anderen Überwachungsverfahrens überprüfen. In diesem Zusammenhang wird vollumfänglich auf die
DE 10 2008 021 627 genommen. - Die Erfindung betrifft des Weiteren einen Kran mit einer Überwachungseinheit und einer Sensorik. Erfindungsgemäß führt der Kran voranstehend beschriebene erfindungsgemäße Verfahren bzw. eine vorteilhafte Ausgestaltung des erfindungsgemäßen Verfahrens aus. Die Vorteile und Eigenschaften des Krans entsprechen offensichtlich denen des erfindungsgemäßen Verfahrens, weshalb an dieser Stelle auf eine erneute Beschreibung verzichtet werden soll.
- Weiterhin betrifft die Erfindung eine Kranüberwachungseineinheit, insbesondere eine Lastmomentbegrenzung, für den vorstehend genannten Kran zur Durchführung des erfindungsgemäßen Verfahrens bzw. einer vorteilhaften Ausgestaltung des Verfahrens.
- Ein weiterer Aspekt der Erfindung betrifft einen Datenträger mit einer gespeicherten Software zur Ausführung auf der vorgenannten Kranüberwachungseinheit, umfassend Befehle, die bewirken, dass der vorgenannte Kran die erfindungsgemäßen Verfahrensschritte ausführt. Die Vorteile und Eigenschaften der Kranüberwachungseinheit bzw. des Datenträgers entsprechen offensichtlich denen der erfindungsgemäßen Verfahren, weshalb auch hier auf eine wiederholende Beschreibung verzichtet wird.
- Weitere Vorteile und Eigenschaften der Erfindung werden anhand von Zeichnungen näher erläutert. Es zeigen:
- Figuren 1 bis 4:
- eine graphische Darstellung der Traglastverteilung in Abhängigkeit des Oberwagendrehwinkels bzw. der maximalen Ausladung, berechnet nach einem Verfahren gemäß Stand der Technik,
- Figuren 5 bis 8:
- eine graphische Darstellung der Traglastverteilung in Abhängigkeit des Oberwagendrehwinkels sowie der maximalen Ausladung, berechnet nach dem erfindungsgemäßen Verfahren,
- Figur 9:
- eine schematische Darstellung der erfindungsgemäßen Überwachungseinheit und
- Figur 10:
- ein Flussdiagramm des erfindungsgemäßen Verfahrensablaufs.
- Die
Figuren 1 bis 8 zeigen die Verteilung der zulässigen Traglast eines Krans in Abhängigkeit seiner Ausladung bzw. des Oberwagendrehwinkels. Der zentral skizzierte Kran umfasst einen Unterwagen, einen auf den Unterwagen drehbar aufgesetzten Oberwagen und eine variable Abstützung. Die variable Abstützung umfasst insgesamt vier Schiebeholme, die in unterschiedliche Stützstellungen ausfahrbar sind. Zudem ist am Oberwagen ein wippbarer Kranausleger angeordnet, der teleskopierbar ausgestaltet sein kann. Während des Kranbetriebs hängt die aktuelle Traglast vom Drehwinkel des Oberwagens sowie der Lastausladung, d. h. dem Wippwinkel des Auslegers, ab. - Eine Überwachungseinrichtung des Krans überwacht die Einhaltung der zulässigen Traglast während des Kranbetriebs. Insbesondere wird durch das erfindungsgemäße Verfahren eine beliebige Stellung der Abstützholme nicht nur zugelassen sondern gleichzeitig durch die Überwachungseinrichtung überwacht.
- Der Kran bzw. die Überwachungseinrichtung greift auf wenige Traglasttabellen zurück, die festigkeitsrelevante Traglastbeschränkungen des Krans beinhalten. Diese sollen beispielsweise eine nachhaltige Schädigung des Krans durch mechanisches Überlasten verhindern. Für Sicherheitskriterien, die von ein oder mehreren Betriebsparametern des Krans abhängen, erfolgt die Berechnung der zulässigen Traglast zur Laufzeit auf dem Kran durch die Überwachungseinrichtung, d. h. also während des Kranbetriebes. Unter anderem werden folgende Kriterien gerechnet:
- Kleine Prüflast gemäß DIN 15019 Teil 2
- Große Prüflast gemäß DIN 15019 Teil 2
- Lastabriss gemäß DIN 15019 Teil 2
- Kippwinkel gemäß DE 13000 Anhang F
- Kippen nach hinten ohne Last gemäß BS 1757 und ISO 43053.3.2
- Zusätzlich können insgesamt mehr als 30 Kriterien gerechnet werden. Das Rechnen der Kriterien auf dem Kran erlaubt es, in jeder Situation die maximal mögliche Traglast auszuschöpfen und nicht auf interpolations bzw. schätzungsbedingte Ungenauigkeiten Rücksicht nehmen zu müssen, die aus Sicherheitsgründen stets eine konservativ bestimmte zulässige Traglast erfordern.
- Zur Berechnung der zulässigen Traglast werden die Kriterien in verschiedene, d. h. in mindestens zwei unterschiedliche Berechnungsarten aufgeteilt. Beispielsweise gilt für die Berechnung der großen Prüflast eine linear unabhängige Berechnungsart. Die große Prüflast berechnet sich mittels der folgenden Formel


- Der Algorithmus zur Berechnung teilt die Kriterien in linear abhängige und linear unabhängige Kriterien ein. Im ersten Schritt wird für jedes linear unabhängige Kriterium die zulässige Traglast ermittelt. Anschließend wird das Minimum dieser TLKriterienA dieser Traglasten bestimmt und festgehalten.
- In einem zweiten Verfahrensschritt wird eine Iteration der zulässigen Traglast mit dem zuvor bestimmten Minimum TLKriterienA als Startwert durchgeführt. In der Iteration wird in jedem Schritt das linear abhängige Kriterium auf dessen Zulässigkeit geprüft. Ist das Kriterium zulässig, so wird zum nächsten Kriterium übergegangen. Sobald ein Kriterium nicht mehr zulässig ist, wird zum nächsten Iterationsschritt in dem betreffenden Kriterium gesprungen ohne dabei eine weitere Prüfung der übrigen Kriterien auszuführen.
- Mit dieser neuen Traglast TL wird der zweite Schritt erneut gestartet. Dies erfolgt solange, bis der zweite Schritt für alle Kriterien eine zulässige Traglast TLKriterienB liefert. Diese wird zur zulässigen maximalen Traglast TL. Nach Ausführung der n-Iterationsschritte soll das erfindungsgemäße Verfahren einen möglichst großen Wert für die zulässige Traglast TL liefern. Die Ermittlung der Traglast TL kann auch mit Hilfe der fortgesetzten Bisektion ausgeführt werden.
- Die Vorteile der Erfindung sollen anhand der Darstellungen der
Figuren 5 bis 8 sowie der Traglastdarstellungen gemäß dem Stand der Technik (Figuren 1 bis 4 ) erläutert werden. - Die Skala am rechten Bildrand ordnet den Grauwerten entsprechende Traglastwerte zu. Die Krankonfigurationen der
Figuren 1 und5 ,2 und6 ,3 und7 sowie4 und8 sind jeweils identisch und werden für den Vergleich herangezogen. - In allen Figuren sind drei Teleskopschüsse des Auslegersystems zu 46% ausgefahren. Die Schiebeholme der Abstützung sind in der Krankonfiguration gemäß den
Figuren 1 und5 vollständig ausgefahren und ermöglichen eine maximale Abstützbasis. Die Konfiguration derFiguren 2 und6 sieht demgegenüber vor, den Kran ohne Abstützung zu betreiben und die Schiebeholme vollständig eingefahren zu belassen. Der Kran gemäß denFiguren 3 und7 arbeitet mit einer eingeschränkten Abstützung, wobei zwei auf einer Kranseite liegende Schiebeholme vollständig ausgefahren und die gegenüberliegenden Holme vollständig eingefahren sind. Die Krankonfiguration derFiguren 4 und8 sieht einen Kranbetrieb mit drei vollständig ausgefahren und einem eingefahrenem Schiebeholm vor. - Die Darstellung der zulässigen Traglast in den
Figuren 5 bis 8 basiert auf einer Berechnung während des Kranbetriebes auf Basis des erfindungsgemäßen Verfahrens, wohingegen die Darstellung derFiguren 1 bis 4 auf den Einsatz von Traglasttabellen setzt, die vor dem Kranbetrieb mit Hilfe eines Einsatzplaners erstellt wurden. - Besonders der Vergleich der
Figuren 2 und6 zeigt den wesentlichen Gewinn an Traglast, der mit Hilfe des erfindungsgemäßen Verfahrens erreichbar ist. Das Verfahren aus dem Stand der Technik nimmt eine minimale Abstützbasis für den Gesamtumfang des Drehwinkels an, wohingegen das erfindungsgemäße Verfahren diese exakt während des Kranbetriebs berechnet und damit zu unterschiedlichen zulässigen Traglasten über den Drehwinkelbereich gelangt. Insbesondere wird an der Vorder- und Rückseite des Krans keine zulässige Traglast verschenkt, da in diesem Drehwinkelbereich die fehlende Abstützvorrichtung durch die Kranlängsabmessung kompensiert wird und damit höher als im Seitenbereich des Krans ist. - Interessant ist nicht nur die Außenkontur des Traglastverlaufs, sondern auch die Innenkontur, d. h. das weiße Feld um die Drehachse des Oberwagens. Dieser Bereich zeigt den nicht zulässigen Bereich, da hier ein Kippen nach hinten aufgrund des Kranballastes erfolgen kann. Auch in diesem Fall kann gemäß
Figur 6 dieser unzulässige Bereich deutlich gegenüber dem Bereich ausFigur 2 reduziert werden. - Der Gewinn an zulässiger Traglast aufgrund der optimierten Berechnung wird auch in den übrigen
Figuren 5 ,7 und8 deutlich. Die Außenkontur zeigt auch hier ganz klar den Gewinn an Traglast. Im Bereich in dem sich der Ausleger über einem der Schiebeholme, d.h. auf der Krandiagonale befindet, kann auch ein wesentlicher Traglastzuwachs verzeichnet werden. - In
Figur 5 formt der dunklere Bereich mit größerer Traglast beinahe ein Quadrat mit konkaven Seiten. Die zulässige Traglast wird insbesondere entlang der Diagonalen gegenüber der Variante ausFigur 1 erhöht. - Auch sehr starke Verbesserungen zeigen die Vergleiche der
Figuren 3 und7 sowie 4 und 8. Hier kann die Veränderung dadurch erklärt werden, dass bei einer Rechnung gemäß des Standes der Technik, das Minimum im Bereich um 360°-Drehbereich des Oberwagens für den gesamten Drehbereich des Oberwagens als maximale Traglast angenommen wird. Von dieser Denkweise löst sich die Erfindung und kann für jede Drehwinkelstellung des Oberwagens die Traglast individuell ermitteln. - Das dargestellte System der
Figur 9 zeigt eine Lastmomentbegrenzung 20, die während des Kranbetriebs sämtliche Kranbewegungen hinsichtlich ihrer Sicherheit überwacht und gegebenenfalls eine Sicherheitsabschaltung bzw. Beschränkung der zulässigen Kranbewegung auslöst. Dieses System kann gemäß der voranstehend beschriebenen Ausgestaltung derFiguren 5 bis 8 ausgeführt sein und das vorgestellte erfindungsgemäße Verfahren ausführen. Das nachfolgende Verfahren stellt eine Erweiterung dieses Verfahrens dar. Dies ist jedoch keine zwingende Voraussetzung für die Ausführung der folgenden Verfahrensschritte, die unabhängig von dem Verfahren gemäß denFiguren 5 bis 8 ausführbar sind. - Die Lastmomentbegrenzung 20 erhält während des Kranbetriebs von einer Vielzahl an Sensoren 10 Messwerte, die einzelne Parameter während des Kranbetriebs charakterisieren. Es sei darauf hingewiesen, dass
Figur 9 lediglich beispielhaft eine Anzahl von drei Sensoren zeigt. In einer realistischen Umgebung basiert das System jedoch auf einer Vielzahl von Sensoren, wobei deren Anzahl nicht beschränkt ist. - Die einzelnen Messwerte der Sensoren 10 kennzeichnen zum Beispiel den Drehwinkel, Wippwinkel oder auch Zylinderdruck des Wippzylinders des Krans; Auf Grundlage der bereitgestellten Sensordaten berechnet die Lastmomentbegrenzung die zulässige Traglast für den aktuellen Kranzustand.
- Um die Sicherheit während des Kranbetriebs gewährleisten zu können, soll dieser ausschließlich im zulässigen Arbeitsbereich betrieben werden. Der zulässige Bereich kennzeichnet sich dadurch, dass die aktuelle Traglast des Krans geringer als die zulässige Traglast im aktuellen Betriebszustand ist. Übersteigt die aktuelle Traglast den zulässigen Wert, so arbeitet der Kran im nicht zulässigen Bereich.
- Mit dem erfindungsgemäßen Verfahren soll erreicht werden, dass die Lastmomentbegrenzung ein frühzeitiges Abbremsen der Kranbewegung vor dem Eintreten in einen nicht zulässigen Arbeitsbereich auslöst. Darüber hinaus soll auch eine eingeschränkte Kranbewegung im nicht zulässigen Bereich unter bestimmten Umständen ermöglicht werden und dennoch eine Überwachung der Sicherheit des Krans durch die Lastmomentbegrenzung erfolgen.
- Hierzu werden die Sensorwerte 11, 12, 13 für die Berechnung der Vorausschau der zulässigen Traglast gezielt in geeignet gewählten Schritten verändert. Im dargestellten Ausführungsbeispiel der
Figur 9 wird der Sensorwert 11 des Sensors 1 manipuliert, um die zulässige Traglast für diesen zukünftigen Parameter, d. h. zukünftigen IST-Wert des Sensors 1, berechnen zu können. Die Lastmomentbegrenzung 20 berechnet für die veränderten Sensorwerte die Zulässigkeit der Kranbewegung und kann daher abschätzen, wann der Kran unter Beibehaltung der aktuellen Kranbewegung in einen nicht zulässigen Bereich gesteuert wird. - Jedes bestehende System aus Sensoren 10 und Lastmomentbegrenzung 20 kann durch Integration der Mittel 50 erweitert werden, um eine gezielte Manipulation wenigstens eines Sensorwertes 11 ausführen zu können.
- Die Lastmomentbegrenzung 20 berechnet also in Realzeit auf dem Kran und zu jeder Zeit, welche zulässigen Traglasten bei Fortführung der aktuell ausgeführten Kranbewegung in naher Zukunft auftreten werden. Mit Hilfe der prognostizierten Entwicklung der Traglast kann die Lastmomentbegrenzung frühzeitig erkennen, ob die zulässige Traglast gegen den Wert null konvergiert. In diesem Fall kann die Kranbewegung rechtzeitig abgebremst bzw. vollständig angehalten werden. Ebenso ist eine Ausgabe eines entsprechenden Warnhinweises an den Kranbediener möglich.
- Zusätzlich kann durch das erfindungsgemäße Verfahren eine eingeschränkte Kranbewegung im nicht zulässigen Bereich ermöglicht werden, welche gleichzeitig von der Lastmomentbegrenzung 20 überwacht wird. Hierbei ist zu beachten, dass die Lastmomentbegrenzung 20 die Aufgabe hat, eine Kranbewegung wesentlich bevor dem Auftreten tatsächlicher Störungen bzw. eines Unfalls zu stoppen. Der Betrieb im nicht zulässigen Bereich bedeutet also keine akute Gefahrensituation, sondern lediglich das Überschreiten eines speziell definierten Grenzwertes.
- Das Ablaufdiagramm der
Figur 10 zeigt das erfindungsgemäße Verfahren zum Überprüfen zulässiger Kranbewegungen im nicht zulässigen Bereich. Der Zustand 200 kennzeichnet den regulären Kranbetrieb, die Kranbewegung wird im Verfahrensschritt 110 ungehindert ausgeführt und kontinuierlich durch die Lastmomentbegrenzung 20 im Block 120 auf Einhaltung der zulässigen Traglast überwacht. - Durch die erfindungsgemäße vorausschauende Berechnung der zulässigen Traglast kann die Kranbewegung rechtzeitig verlangsamt bzw. vollständig gestoppt werden. Ist ein derartiger Notstopp erfolgt, geht die Lastmomentbegrenzung 20 zum Verfahrensschritt 200 über. Hier wird aus der berechneten Vorausschau ermittelt, mit welcher oder welchen Kranbewegungen der Kran auf sichere Art und Weise wieder aus dem nicht zulässigen Bereich gefahren werden kann. Dem Bediener wird zudem eine mögliche Auswahl angezeigt. Der Kranbediener kann folglich die situationsabhängig günstigste Variante wählen. Im Schritt 300 wird die Freigabe der ausgewählten Kranbewegung geprüft. Hierdurch wird sichergestellt, dass nur die von der Lastmomentbegrenzung freigegebenen und im Schritt 200 angezeigten Kranbewegungen ausgeführt und übrige Kranbewegungen blockiert werden.
- Wählt der Bediener eine freigegebene Bewegung aus, so wird diese ausgeführt 400 und kontinuierlich durch die Lastmomentbegrenzung überwacht 500. Führt die Kranbewegung nicht zum erwünschten Ergebnis, d.h. zum Verlassen des nicht zulässigen Bereichs, so wird erneut ein Sicherheitsstopp durch die Lastmomentbegrenzung ausgelöst. Erst nach Verlassen des unzulässigen Arbeitsbereichs tritt die Lastmomentbegrenzung in den regulären Zustand 100 und schaltet sämtliche Kranbewegungen frei.
Claims (16)
- Verfahren zum Betreiben eines Krans mit einer Überwachungseinheit, die eine von einem oder mehreren veränderbaren Parametern abhängende zulässige Traglast während des Kranbetriebs berechnet, und einer Sensorik, die die aktuellen veränderbaren Parameter während des Kranbetriebs erfasst und der Überwachungseinheit zur Verfügung stellt, dadurch gekennzeichnet, dass ein oder mehrere Sensorwerte (11, 12, 13) vor der Berechnung der zulässigen Traglast modifiziert werden, um die zulässige Traglast für ein oder mehrere zukünftige Parameter zu bestimmen, und eine Überprüfung erfolgt, sobald die tatsächliche Traglast der zulässigen Traglast entspricht oder diese übersteigt und die Überwachungseinheit die Kranbewegung gestoppt bzw. begrenzt hat, wobei bei der Überprüfung durch gezielte Modifikation des wenigstens einen Sensorwertes geprüft wird, welche Parameteränderung oder Parameteränderungen zu einer Abnahme der tatsächlichen Traglast und/oder zu einer Zunahme der zulässigen Traglast führen und wenigstens ein oder mehrere mögliche Parameteränderungen bzw. Kranbewegungen angezeigt und/oder freigegeben werden.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Überwachungseinheit den oder die Parameter verändert, so dass die tatsächliche Traglast die berechnete zulässige Traglast nicht übersteigen kann, wobei die Veränderung wenigstens eines der Parameter vorzugsweise derart vorgenommen wird, so dass die Geschwindigkeit der Parameterveränderung kontinuierlich oder stufenweise verringert oder gestoppt wird, bevor ein Parameterwert erreicht wird, bei dem die zulässige Traglast der tatsächlichen Traglast entspricht.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass es sich bei wenigstens einem Parameter um ein die Position des Krans oder eines Kranbauteils betreffenden Parameter handelt und/ oder bei wenigstens einem weiteren Parameter um einen die Auslegerlänge, den Auslegerwinkel, den Derrickballastradius und/oder den Drehwinkel der Drehbühne betreffenden Parameter handelt.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Geschwindigkeit der Parameterveränderung ab Unterschreiten einer Differenz zwischen tatsächlicher und zulässiger Traglast kontinuierlich oder stufenweise verringert wird.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass der Kran eine variable Abstützbasis umfasst und die Überwachungseinheit zur Überwachung der Kransicherheit mehrere Sicherheitskriterien während des Kranbetriebes überwacht, indem für jedes Kriterium, das von wenigstens einem die Krankonfiguration und/oder Kranbewegung während des Kranbetriebs betreffenden Parameter abhängig ist, ein zulässiger spezifischer Grenzwert während des Kranbetriebs berechnet und auf Einhaltung überwacht wird.
- Verfahren nach Anspruch 5, dadurch gekennzeichnet, dass der wenigstens eine die Krankonfiguration und/oder Kranbewegung während des Kranbetriebs betreffende Parameter die variable Abstützbasis und/oder den Oberwagendrehwinkel betrifft.
- Verfahren nach einem der vorhergehenden Ansprüche 5 oder 6, dadurch gekennzeichnet, dass wenigstens ein spezifischer Grenzwert die zulässige spezifische Traglast ist.
- Verfahren nach einem der vorhergehenden Ansprüche 5 bis 7, dadurch gekennzeichnet, dass die zulässige Gesamttraglast aus den einzelnen spezifischen Grenzwerten bzw. zulässigen spezifischen Traglasten der einzelnen Kriterien berechnet wird.
- Verfahren nach Anspruch 8, dadurch gekennzeichnet, dass für die Berechnung der zulässigen Gesamttraglast die Kriterien in wenigstens zwei unterschiedliche Berechnungsarten aufgeteilt werden, insbesondere in linear abhängige und linear unabhängige Berechnungsarten.
- Verfahren nach Anspruch 9, dadurch gekennzeichnet, dass in einem ersten Schritt für jedes linear unabhängige Kriterium die zulässige Traglast berechnet und im Anschluss das Minimum dieser Traglasten bestimmt wird und in einem zweiten Schritt mittels Iteration eine zulässige Traglast für die linear abhängigen Kriterien ermittelt, wobei die Iteration vorzugsweise mit dem Minimum der Traglast der linear unabhängigen Kriterien beginnt.
- Verfahren nach Anspruch 10, dadurch gekennzeichnet, dass die Ermittlung der Traglast mittels fortgesetzter Bisektion erfolgt.
- Verfahren nach einem der vorhergehenden Ansprüche 8 bis 11, dadurch gekennzeichnet, dass ein oder mehrere vorgerechnete Traglasttabellen abrufbar auf dem Kran gespeichert sind, wobei die Tabellen festigkeitsrelevante Grenzwerte beinhalten.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass ein integrierter Kraneinsatzplaner für eine diversitäre Kranüberwachung verwendet wird.
- Kran mit einer Überwachungseinheit, einer Sensorik und vorzugsweise einer variablen Abstützbasis zur Durchführung des Verfahrens nach einem der Ansprüche 1 bis 13.
- Kranüberwachungseinheit, insbesondere Lastmomentbegrenzung (20), für einen Kran gemäß Anspruch 14 zur Durchführung des Verfahrens gemäß einem der Ansprüche 1 bis 13.
- Datenträger mit einer gespeicherten Software zur Ausführung auf einer Kranüberwachungseinheit gemäß Anspruch 15, umfassend Befehle, die bewirken, dass der Kran gemäß Anspruch 14 die Verfahrensschritte gemäß einem der Ansprüche 1 bis 13 ausführt.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012011726.4A DE102012011726C5 (de) | 2012-06-13 | 2012-06-13 | Verfahren zum Betreiben eines Krans mit Überwachungseinheit sowie Kran |
| DE102012011871.6A DE102012011871B4 (de) | 2012-06-13 | 2012-06-13 | Verfahren zur Überwachung der Kransicherheit sowie Kran |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2674384A1 EP2674384A1 (de) | 2013-12-18 |
| EP2674384B1 true EP2674384B1 (de) | 2021-01-27 |
Family
ID=48670320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13002979.6A Active EP2674384B1 (de) | 2012-06-13 | 2013-06-11 | Verfahren zur Überwachung der Kransicherheit sowie Kran |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9446935B2 (de) |
| EP (1) | EP2674384B1 (de) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031223A (ja) * | 2012-08-01 | 2014-02-20 | Tadano Ltd | 作業範囲図および作業範囲図表示装置 |
| DE102014000652A1 (de) * | 2014-01-17 | 2015-07-23 | Senvion Se | Vorrichtung mit einer Windenergieanlage und einem Kran |
| DE102014105618A1 (de) | 2014-04-22 | 2015-10-22 | Terex Cranes Germany Gmbh | Verfahren und Vorrichtung zum Betreiben eines Mobilkrans sowie Mobilkran |
| DE102015006992B4 (de) * | 2014-06-10 | 2021-04-15 | Liebherr-Werk Ehingen Gmbh | Verfahren und System zur Berechnung von Daten für den Betrieb eines Krans |
| CN104192714B (zh) * | 2014-07-30 | 2016-04-27 | 徐州重型机械有限公司 | 用于起重机人机交互吊装智能化操作的方法和力矩限制器 |
| US10766748B2 (en) * | 2014-09-11 | 2020-09-08 | Jacques Tranchero | Crane for lifting and transporting loads comprising a roll-over protection system |
| DE102015112194B4 (de) | 2015-07-27 | 2019-01-03 | Manitowoc Crane Group France Sas | Verfahren zur Planung oder Überwachung der Bewegung eines Kranes sowie Kran |
| DK3362399T4 (da) * | 2015-10-16 | 2024-04-15 | Palfinger Ag | Arrangement af en styring og et mobilt styringsmodul |
| DE102016104358B4 (de) * | 2016-03-10 | 2019-11-07 | Manitowoc Crane Group France Sas | Verfahren zum Ermitteln der Tragfähigkeit eines Krans sowie Kran |
| DE102017120613B4 (de) * | 2017-09-07 | 2024-03-14 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Bewegen einer Last mit einem Kran |
| KR102180150B1 (ko) * | 2018-12-27 | 2020-11-17 | (주)아이티공간 | 크레인 안전 관리 시스템 |
| CN109761147B (zh) * | 2019-03-04 | 2021-04-20 | 大连理工大学 | 一种履带起重机地基承载刚度在线检测方法 |
| CN113003419A (zh) * | 2021-03-09 | 2021-06-22 | 浙江三一装备有限公司 | 作业机械结构动态模拟显示方法及系统 |
| FR3123908B1 (fr) * | 2021-06-14 | 2023-10-27 | Manitowoc Crane Group France | Procédé de sécurisation d’une grue à la survenue d’un évènement exceptionnel |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5217126A (en) | 1991-10-24 | 1993-06-08 | Kabushiki Kaisha Kobe Seiko Sho | Safety apparatus for construction equipment |
| EP0675069A1 (de) * | 1994-02-28 | 1995-10-04 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft m.b.H. | Gleisverfahrbare Maschine mit einem Drehkran |
| EP0779238A1 (de) | 1995-12-14 | 1997-06-18 | Liebherr-Werk Ehingen GmbH | Kranfahrzeug |
| US6744372B1 (en) | 1997-02-27 | 2004-06-01 | Jack B. Shaw | Crane safety devices and methods |
| DE102005059768A1 (de) | 2005-07-22 | 2007-01-25 | Liebherr-Werk Ehingen Gmbh | Kran, vorzugsweise Raupen- oder Fahrzeugkran |
| DE102005035460A1 (de) | 2005-07-28 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zur Traglastermittlung bei Kranen |
| DE102005035729A1 (de) | 2005-07-29 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Betreiben eines Krans |
| DE102006040782A1 (de) | 2006-08-31 | 2008-03-20 | Liebherr-Werk Nenzing Gmbh, Nenzing | Sicherungs- und Steuerungsverfahren für Krane |
| DE202006017730U1 (de) | 2006-11-21 | 2008-04-03 | Liebherr-Werk Ehingen Gmbh | Mobilkran |
| CN101348216A (zh) | 2008-09-05 | 2009-01-21 | 湖南三一起重机械有限公司 | 一种起重机安全保护系统及其起重机 |
| DE102008021627A1 (de) | 2008-04-30 | 2009-11-12 | Liebherr-Werk Ehingen Gmbh | Mobilkran und Verfahren zum Betreiben eines Mobilkranes |
| DE102011115240A1 (de) * | 2010-10-14 | 2012-04-19 | Liebherr-Werk Ehingen Gmbh | Kran, insbesondere Raupen- oder Mobilkran |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5730305A (en) * | 1988-12-27 | 1998-03-24 | Kato Works Co., Ltd. | Crane safety apparatus |
| KR19980702711A (ko) * | 1995-03-03 | 1998-08-05 | 안자키사토루 | 이동식 크레인 차량의 가동범위 표시장치 |
| DE19731089A1 (de) * | 1997-07-19 | 1999-01-21 | Bosch Gmbh Robert | Einrichtung zur Gewichtsbestimmung von angelenkten Lasten |
-
2013
- 2013-06-11 US US13/915,114 patent/US9446935B2/en active Active
- 2013-06-11 EP EP13002979.6A patent/EP2674384B1/de active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5217126A (en) | 1991-10-24 | 1993-06-08 | Kabushiki Kaisha Kobe Seiko Sho | Safety apparatus for construction equipment |
| EP0675069A1 (de) * | 1994-02-28 | 1995-10-04 | Franz Plasser Bahnbaumaschinen-Industriegesellschaft m.b.H. | Gleisverfahrbare Maschine mit einem Drehkran |
| EP0779238A1 (de) | 1995-12-14 | 1997-06-18 | Liebherr-Werk Ehingen GmbH | Kranfahrzeug |
| US6744372B1 (en) | 1997-02-27 | 2004-06-01 | Jack B. Shaw | Crane safety devices and methods |
| DE102005059768A1 (de) | 2005-07-22 | 2007-01-25 | Liebherr-Werk Ehingen Gmbh | Kran, vorzugsweise Raupen- oder Fahrzeugkran |
| DE102005035460A1 (de) | 2005-07-28 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zur Traglastermittlung bei Kranen |
| DE102005035729A1 (de) | 2005-07-29 | 2007-02-01 | Liebherr-Werk Ehingen Gmbh | Verfahren zum Betreiben eines Krans |
| DE102006040782A1 (de) | 2006-08-31 | 2008-03-20 | Liebherr-Werk Nenzing Gmbh, Nenzing | Sicherungs- und Steuerungsverfahren für Krane |
| DE202006017730U1 (de) | 2006-11-21 | 2008-04-03 | Liebherr-Werk Ehingen Gmbh | Mobilkran |
| DE102008021627A1 (de) | 2008-04-30 | 2009-11-12 | Liebherr-Werk Ehingen Gmbh | Mobilkran und Verfahren zum Betreiben eines Mobilkranes |
| CN101348216A (zh) | 2008-09-05 | 2009-01-21 | 湖南三一起重机械有限公司 | 一种起重机安全保护系统及其起重机 |
| DE102011115240A1 (de) * | 2010-10-14 | 2012-04-19 | Liebherr-Werk Ehingen Gmbh | Kran, insbesondere Raupen- oder Mobilkran |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2674384A1 (de) | 2013-12-18 |
| US9446935B2 (en) | 2016-09-20 |
| US20130345938A1 (en) | 2013-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2674384B1 (de) | Verfahren zur Überwachung der Kransicherheit sowie Kran | |
| EP1894882B1 (de) | Sicherungs- und Steuerungsverfahren für Krane | |
| DE102011107754B4 (de) | Winkelbezogenes Verfahren zur Überwachung der Kransicherheit während des Rüstvorgangs, sowie Kran und Kransteuerung | |
| EP3219662B1 (de) | Verfahren zum ermitteln der tragfähigkeit eines krans sowie kran | |
| AT516981B1 (de) | Transporteinrichtung | |
| DE102012011871B4 (de) | Verfahren zur Überwachung der Kransicherheit sowie Kran | |
| DE102010020016B4 (de) | Kran und Verfahren zum Aufrichten des Krans | |
| EP2113481A1 (de) | Mobilkran mit einer Kranüberwachungseinrichtung | |
| EP2719652B1 (de) | Vorrichtung zur Beförderung von Personen mittels eines Krans, und Kran mit einer Vorrichtung zur Beförderung von Personen | |
| DE102012011726C5 (de) | Verfahren zum Betreiben eines Krans mit Überwachungseinheit sowie Kran | |
| WO2020104282A1 (de) | Kran sowie verfahren zum überwachen des betriebs eines solchen krans | |
| WO2002018264A1 (de) | Redundantes sicherheitssystem eines fahrzeuges | |
| EP1925586B1 (de) | Mobilkran | |
| EP1748021B2 (de) | Verfahren zur Traglastermittlung bei Kranen | |
| DE10115312A1 (de) | Verfahren zur Steuerung von Kranbewegungen sowie Kran | |
| EP2733268B1 (de) | Maschine mit Ladeanlage | |
| DE102013000463A1 (de) | Mobiles Arbeitsgerät, insbesondere Mobilkran | |
| EP4053065B1 (de) | Vorrichtung und verfahren zur steuerung eines krandrehwerks sowie kran | |
| DE102012022403A1 (de) | Fahrbare Maschine mit Ladeanlage | |
| DE112014002081B4 (de) | Sensorbasierte Überwachung von Windrichtung und Wärmeeinstrahlung für ein mobiles Arbeitsgerät | |
| EP2847121A1 (de) | Kran | |
| DE102018221436A1 (de) | Verfahren zur Bestimmung des Einflusses von Wind auf einen Kran | |
| DE102021128317A1 (de) | Verfahren und System zur Planung eines Einsatzes zum Heben einer Last mit einem Kran | |
| DE20206677U1 (de) | Sicherheitsvorrichtung für Krane | |
| DE3337445A1 (de) | Belastungswaechter mit momentkapazitaetsbegrenzer zur verwendung in einem hydraulikkreis |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20140604 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20170127 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200819 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1358200 Country of ref document: AT Kind code of ref document: T Effective date: 20210215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013015465 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210428 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210427 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502013015465 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: MANITOWOC CRANE GROUP GERMANY GMBH Effective date: 20211013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210611 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210527 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210630 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1358200 Country of ref document: AT Kind code of ref document: T Effective date: 20210611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210611 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 502013015465 Country of ref document: DE |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130611 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230607 |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| 27O | Opposition rejected |
Effective date: 20230323 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250617 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250630 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250627 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210127 |