EP2433010B1 - Verfahren und vorrichtung zur betriebspunktbestimmung einer arbeitsmaschine - Google Patents
Verfahren und vorrichtung zur betriebspunktbestimmung einer arbeitsmaschine Download PDFInfo
- Publication number
- EP2433010B1 EP2433010B1 EP10717116.7A EP10717116A EP2433010B1 EP 2433010 B1 EP2433010 B1 EP 2433010B1 EP 10717116 A EP10717116 A EP 10717116A EP 2433010 B1 EP2433010 B1 EP 2433010B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rotational speed
- operating point
- pump
- determined
- work machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D15/00—Control, e.g. regulation, of pumps, pumping installations or systems
- F04D15/0088—Testing machines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D15/00—Control, e.g. regulation, of pumps, pumping installations or systems
- F04D15/0094—Indicators of rotational movement
Definitions
- the invention relates to a method for determining an operating point of a working machine and / or an asynchronous motor driving the same, wherein a power recorded by the working machine and / or its delivery rate characterizes an operating point, one or more operating point-dependent measured variables of the working machine are detected by one or more sensors, and the measured values are evaluated and / or stored during operation of the working machine.
- the invention further relates to a method for monitoring an operating point.
- the invention further relates to a device for carrying out the method.
- the operating point of a fluid flow machine in particular a centrifugal pump, on the flow rate-delivery height characteristic or QH characteristic is, in particular by their flow, below also called delivery rate, characterized.
- QH characteristic the flow rate-delivery height characteristic
- an operating point of a centrifugal pump is determined by an electrical measurement, wherein from a current and voltage measurement, the output motor power is calculated taking into account the efficiency of the engine.
- a direct measurement of the flow rate usually requires magnetic-inductive flowmeters.
- An indirect determination of the flow rate by computational means is associated with additional difficulties.
- a delivery rate is calculated from the values of a delivery flow-rate characteristic, a QH characteristic in which the delivery height H is plotted against the delivery flow, or a delivery flow-rate characteristic, a QP characteristic in which the output P is above the delivery flow Q is derived, this is difficult or even impossible in those cases where there is a flat or not steadily increasing QH characteristic or QP characteristic. If the delivery rate is to be determined with measured pressures from the Q-H characteristic curve of a centrifugal pump, then the Q-H characteristic curve must be unique, ie exactly one Q value can be assigned to each H value.
- the measurement of the electrical power consumption of a motor-pump unit is associated in practice with some effort.
- the active power measurement takes place in a control cabinet, takes up space there, in particular for the measurement of the motor current through current transformers, and requires an assembly effort, which must be provided by a qualified electrician.
- the power and / or torque of the induction motor is determined by counting the pulses of the motor shaft within a so-called gate time determined by one or more periods of the synchronous speed.
- the "Kloss equation" is used to determine the power and / or torque.
- the method requires several input variables, including the synchronous speed, which is determined from electrical measurements. In addition, the results must be corrected as a function of the operating temperature of the engine, which requires a prior metrological determination and storage of required correction factors per engine type. This arrangement is elaborately designed. In industrial practice, this method has proved to be unsuitable. Particularly disadvantageous, as in a conventional measurement of the active power consumption of an asynchronous motor by active power meters and current transformers, the installation of such an arrangement by an electrician is absolutely necessary.
- DE 10 2006 049 440 A1 is a method for detecting an operating condition of a pump, in particular a centrifugal or positive displacement pump, known in a pump system.
- the method and its device serve, in comparison to a stored normal state, a detection of a faulty operating state of a pump, pump system and hydraulic system.
- a pressure sensor records the temporal pressure profile in the pumped medium.
- a calculated parameter characterizes the pulsation of the pressure and / or flow profile in a calculation time interval. By comparing the calculated characteristic value with at least one predetermined characteristic value or with one of these limited characteristic value range, the predetermined characteristic value or the limited characteristic value range corresponding to an operating state of interest of the pump, the operating state is determined and output.
- the speed of the pump is determined from the pressure sensor signal and provided to the vibration sensor. The reasons are not revealed. Neither the speed information nor any other quantities provide a statement about in which operating point on a QH or QP characteristic and / or at which recorded power the pump is operated. With this method, only deviations from previously determined and stored reference values are displayed.
- the DE 196 18 462 A1 discloses another method and apparatus for determining an extrinsic performance parameter of an energy converting device, such as volume or mass flow through a motor driven centrifugal pump, which continuously determines an operating state dependent intrinsic quantity.
- the invention has for its object to provide a method and an apparatus available through which a little expensive and reliable determination and if necessary, monitoring of the current operating point of a working machine and / or of an asynchronous motor driving it is possible.
- the operating point is determined without the use of electrical measurements of the driving induction motor, that from a mechanical measurement pressure, differential pressure, force, vibration, structure-borne noise or airborne sound, by means of a signal analysis, in particular a frequency analysis, one to the rotary sound the machine linearly proportional frequency is determined, from which the rotational speed of the drive machine is determined and from the slip-dependent speed-torque dependence of the asynchronous motor, the operating point is determined.
- the operating point is determined according to the invention without the use of electrical measured variables. Instead, a frequency which is linearly proportional to the rotary sound of the working machine is determined from the signal curve of a measured mechanical measured variable, in particular the rotary sound frequency of the working machine.
- a frequency which is linearly proportional to the rotary sound of the working machine is determined from the signal curve of a measured mechanical measured variable, in particular the rotary sound frequency of the working machine.
- mechanical parameters are pressure, in particular the pressure on the pressure side of a centrifugal pump, differential pressure, in particular the differential pressure between the suction and pressure side of a centrifugal pump, force, vibration, structure-borne noise or airborne sound, in particular one or caused by a centrifugal pump, or the like suitable.
- the operating point of the working machine can be determined from a single, non-electrical measured variable. By dispensing with electrical parameters, the method according to the invention for determining the operating point is comparatively inexpensive and can be carried out with the simplest installation effort.
- Necessary parameters for determining the speed-torque characteristic curve of the motor are derived from the nameplate data of an asynchronous motor.
- the rated torque M N results from the quotient of the rated power of the asynchronous motor P 2N and the rated speed n N :
- nM characteristic of the asynchronous motor shown.
- M N M N ⁇ n - n 0 n N - n 0
- the determination of the power absorbed by the work machine is made from the previously determined input speed, hereinafter also called shaft speed, and the speed-torque curve, the nM characteristic of the motor.
- An advantageous embodiment provides for a pump, in particular a centrifugal pump, as a working machine, the determination of the flow rate from the drive speed before.
- the rotary sound frequency is determined by means of signal analysis, in particular frequency analysis, for example by means of a fast Fourier transformation (FFT) or an autocorrelation. From this, the drive speed is determined.
- FFT fast Fourier transformation
- the flow rate of the pump from the determined from the drive speed recorded power or shaft power is determined. From the input speed or shaft speed, the shaft power of the pump is first determined as described above with the aid of the known n-M characteristic curve or an n-P characteristic curve derived therefrom according to formula (7). In a subsequent step, the flow rate Q of the pump is determined from the shaft power by means of a stored Q-P characteristic curve.
- the delivery rate of the pump may be determined from parameters of the engine describing a speed-torque characteristic of the engine, as well as from parameters of the pump describing a capacity-power characteristic and the input speed.
- a QP characteristic curve can be described, for example, in the form of a parameter table with a plurality of interpolation points ( indexes _1 to _i ).
- the method uses such a pre-stored table to determine the flow rate from the shaft power: Flow rate Q Q _1 Q _2 Q _3 ... Q _i Shaft power P 2 P 2_1 P 2_2 P 2_3 ... P 2_i
- the table can contain interpolation points for the respective speed, so that a direct flow rate determination from the determined speed is possible.
- quotient values P 2 / H can be stored: Flow rate Q Q _1 Q _2 Q _3 ... Q _i Shaft power P 2 P 2_1 P 2_2 P 2_3 ... P 2_i Delivery height H H _1 H _2 H _3 ... H _i Quotient P 2 / H P 2_1 / H _1 P 2_2 / H _2 P 2_2 / H _2 ... P 2_i / H _i
- a characteristic curve for determining the flow rate from the load-dependent speed change can be determined even without knowledge of QP and QH characteristic.
- the respective operating speed can be determined and stored. This results in the following generally represented parameter table: Flow rate Q Q _1 Q _2 Q _3 ... Q _i Speed n n _1 n _2 n _3 ... n _i
- the speed-torque dependence of the asynchronous motor is also used.
- the invention uses the knowledge that this causes an evaluable speed change over the flow rate range. With such a characteristic, which is usually not documented for a pump, the delivery rate of the centrifugal pump can be determined directly from the speed.
- the drive speed or shaft speed for determining the operating point of the pump, in particular the centrifugal pump, from measured values of one or more pressure sensors is determined.
- the pressure sensors for the dynamic measurement of pressures, in particular of pulsating pressures are suitable.
- the operating point of the pump, in particular centrifugal pump, characterized by the shaft power and / or delivery rate is thus determined solely from measured values of one or more pressure sensors.
- One or more pressure sensors are used on a centrifugal pump to detect the suction and / or discharge pressure of a centrifugal pump.
- Pressure sensors although designed to measure static pressures, are also usually suitable for the dynamic measurement of pressures.
- the input speed for determining the operating point of the driven machine and / or the asynchronous motor driving the same is determined from measured values of one or more structure-borne sound and / or airborne sound sensors.
- the structure-borne noise and / or airborne sound sensors can be arranged on the working machine and / or on the asynchronous motor driving the same.
- the sensors can also be arranged in the environment of the working machine. In any case, from signals of the sensors which detect mechanical measured variables, a frequency which is linearly proportional to the rotary sound of the working machine is detected, from which the rotational speed of the working machine is determined. And from this, the operating point is determined using the speed-torque dependence of the asynchronous motor.
- a determined operating point can be monitored according to the invention as to whether it is within or outside a predetermined permissible range. On the basis of an operating point which is outside a predetermined range, a faulty operating state, in particular over or underload, of the working machine and / or of the asynchronous motor is detected.
- a centrifugal pump By monitoring or evaluating the power consumption of a centrifugal pump, it is possible, for example, to conclude operation at partial load or optimum operation. Using of structure-borne noise or airborne sound as a measured variable, a dry run of the centrifugal pump can be detected. Experiments have shown that the detection according to the invention of an overload of an asynchronous motor works reliably and robustly.
- Increased power consumption compared to a documented and parameterized power consumption may indicate overload of the pump or motor.
- the cause of a supposedly increased power consumption can also be a supply-side undervoltage, which leads to increased slip.
- the diagnosis of overload for the unit, consisting of pump and motor nevertheless true, since under low voltage and thus increased slip, the power consumption of the motor is increased.
- This influence is significant when the mains voltage is outside the tolerances and, for example, is more than 10% below the rated voltage.
- the device is a data memory for technological data of the working machine and / or has this driving asynchronous motor and determined from a mechanical measurement pressure, differential pressure, force, vibration, structure-borne noise or airborne sound by means of a signal analysis, in particular a frequency analysis, a linearly proportional to the rotational sound of the working machine frequency, therefrom determines the rotational speed of the drive machine and from there using the slip Speed-torque dependence of the asynchronous motor the operating point of non-electrical quantities, without the use of electrical Measured variables of the driving asynchronous motor, determined and possibly monitored.
- parameters that describe the speed-torque dependence of the asynchronous motor, and / or other technological data of the working machine arrangement may be stored. These may be accessed during operation of the work machine to determine the operating point. A detection of electrical measurements by the device is not necessary. The device can determine the operating point of the working machine from a single measuring signal, for example a pressure sensor signal.
- a pump in particular a centrifugal pump, as a working machine, it is provided that the determination of a flow rate of the pump from the drive speed. At the pump only mechanical parameters are recorded. From the determined rotary sound frequency, the drive or shaft speed of the pump is determined.
- the device may be arranged on the pump, on the drive motor or in its environment and / or be designed integrated with the pump or its drive motor.
- the device can determine the delivery rate of the pump, in particular centrifugal pump, from the power or shaft power determined from the drive speed or shaft speed.
- the device the flow rate of the pump, in particular centrifugal pump, from parameters of the engine, which describe a speed-torque curve of the engine, as well as parameters of the pump, which describe a flow rate-power characteristic, and the drive speed or shaft speed determined.
- the device determines the delivery rate of the pump, in particular centrifugal pump, directly from a characteristic curve which represents the load-dependent speed change over the delivery rate of the pump.
- a characteristic curve which represents the load-dependent speed change over the delivery rate of the pump.
- Such a characteristic can be determined by test runs and stored in the data memory so that it can be called up during the operation of the centrifugal pump.
- the speed-torque dependence of the asynchronous motor is used, which leads to a speed change over the flow range. From this, the operating point characterized by the power absorbed by the working machine and / or its delivery rate can be determined particularly easily.
- the device has at least one connection for a pressure sensor and from measured values of a connected pressure sensor the drive speed or shaft speed for determining the operating point of the working machine determined.
- Pressure sensors for detecting static pressures are also able to detect dynamic pressure fluctuations.
- Such pressure sensors are already attached to many pumps, in particular to detect their final pressure.
- Conventional devices for detecting signals from pressure sensors by means of analog inputs usually allow the use of filtered, ie damped in the dynamics measured values.
- To detect the dynamic pressure signal component of interest according to the invention such inputs are too slow and insensitive. Highly dynamic inputs of measuring devices capable of detecting signal components in frequency ranges of a few kilohertz are usually not robust enough in industrial practice and are also expensive.
- the device according to the invention differs from the mentioned industrially common, in that it allows detection of the pulsating portion of a pressure signal with high dynamics. This ensures accurate determination of the frequency of the pulsating pressure component in a frequency range of interest.
- the device has an input for signal components up to about 500 Hz, with a cutoff frequency for an input filter is correspondingly higher.
- the frequency range of interest for a particular pump is a small section of the entire measured frequency range limited by lower and upper rotary sound frequencies f D_min and f D_max .
- An evaluation can thus be carried out selectively and accurately.
- n Max n 0 be accepted.
- the device according to the invention therefore has a signal processing unit which performs an accurate determination of the rotary sound frequency, preferably with an accuracy of 1/10 hertz or of a few 1/100 hertz. This is achieved by means of a very high sampling frequency and / or by a correspondingly long sampling interval.
- the amplitude of the pulsating pressure component is relatively low.
- the amplitude of the pulsating signal component is less than 1% of the pressure.
- the device triggers the measurement range of the pressure signal correspondingly high, so that the pressure pulsation despite the low amplitude after analog-to-digital conversion is perfectly evaluated, ie determines the rotational frequency can be.
- the inventive Device thus enables a reliable operating point determination of a pump.
- the device can have at least one connection for a structure-borne sound and / or airborne sound sensor and determine the drive speed for determining the operating point of the work machine and / or of the asynchronous motor driving it from measured values of a connected structure-borne sound and / or airborne sound sensor.
- the device For detecting operating point-dependent sound measurements, the device is expediently connectable to a microphone or has an integrated microphone.
- the device is a telephone, in particular a mobile telephone, for detecting the operating noise of the working machine and for operating point determination and / or monitoring.
- a device uses the method according to the invention.
- a program sequence can be stored in a data memory of the device, which can be processed by a processing unit located in the device.
- the device can also spatially separate from the machine determine its operating point and monitor if necessary. It is provided that the device uses telecommunications means, in particular a telephone or mobile telephone and a telecommunications network, to perform the operating point determination and / or monitoring at a location other than the operating location of the working machine.
- the telecommunication means serve as signal acquisition and / or transmission means.
- a mobile telephone can detect structure-borne noise and / or airborne sound signals of a work machine by means of a built-in microphone and transmit it via telecommunications network to a device for operating point determination and / or monitoring spatially separate from the work machine.
- the invention can be used with advantage in a centrifugal pump arrangement comprising at least one centrifugal pump with a shaft and an asynchronous motor driving the shaft and with one or more sensors for detecting operating point-dependent measured variables.
- the device may be arranged on the centrifugal pump and / or integrated into the centrifugal pump and / or the asynchronous motor. An arrangement in the vicinity of the centrifugal pump arrangement or a spatially separate arrangement is provided.
- the FIG. 1 a shows a delivery flow-rate characteristic 2, a so-called QH characteristic, a centrifugal pump. From a measured between the pressure and suction side of the centrifugal pump pressure difference can be determined according to the prior art, a delivery height H of the pump and the operating point of the centrifugal pump via the delivery flow-height characteristic curve 2 can be determined. However, such an operating point determination is insufficient in a range of smaller flow rates, in which the flow rate-conveying height characteristic curve 2 is ambiguous or unstable. Such an unstable characteristic has the effect that, given certain measured pressure differences to a specific delivery height H, two delivery flow rates 3, 4 exist. Thus, it can not be concluded clearly on a flow Q (H) of the centrifugal pump.
- Fig. 1b shows a flow rate-power curve 10, a so-called QP characteristic, a centrifugal pump.
- the flow rate-power curve 10 shown here is unique, so that with the information about the power consumption of the pump a statement regarding the flow rate Q (P) of the pump and thus over the operating point is possible.
- the measurement of the electrical power consumption of a centrifugal pump assembly is associated in practice with some effort, because this takes place in a cabinet and requires an assembly effort, which is to be made by a skilled electrician.
- Both QH characteristic 2 and QP characteristic 10 are typically documented for a particular centrifugal pump.
- Fig. 2 shows a general schematic representation of a method 21 according to the invention, in which the operating point of a work machine and / or driving this asynchronous motor is determined without the use of electrical measurements of the driving induction motor.
- a rotational frequency f D is determined in a step 23 from the measured variable by means of a signal analysis, in particular frequency analysis, a frequency which is linearly proportional to the rotary sound of the working machine.
- the speed n of the drive machine is determined in a next step 24.
- the power consumed by the work machine, here designated P 2 , and / or its delivery Q is determined.
- the slip-related speed-torque dependency of the asynchronous motor driving the working machine is used for this purpose.
- the operating point determined in this way is available in step 29 for further processing and / or display.
- the Fig. 3 shows a schematic, compared to Fig. 2 more detailed representation of the method steps of a method 21 for determining an operating point. Shown is a method 21 for determining a delivery flow or a flow rate Q from a measured pressure pulsation or a measured structure-borne noise or airborne sound via a stored engine model and a pump characteristic.
- the parameters necessary for carrying out the individual method steps can be stored or stored in a data memory 30 and are available for carrying out the individual method steps.
- the required motor parameters delivered rated or rated power P 2N and rated speed n N , and the optional motor parameters line frequency f, pole pair p or synchronous speed n 0 thereby form a motor model, which is suitably stored in a first part 31 of the data memory 30.
- the synchronous speed n is 0 may also consist of mains frequency f and pole pair number p to be determined or of the nominal rotational speed n N and to this next largest theoretically possible synchronous speed (for example, 3600 min -1 to 3000 min -1, 1800 min -1, 1500 min -1 , 1200 min -1 , 1000 min -1 , 900 min -1 , 750 min -1 , 600 min -1 or 500 min -1 ).
- the overturning moment M k of the motor can be stored.
- a minimum speed n min and a maximum speed n max can be stored.
- a flow rate-power characteristic, a QP characteristic, a centrifugal pump is stored.
- the power delivered by the motor P 2 corresponds to the shaft power of the pump.
- the delivery rate Q can be determined. From the measured variable and its signal pulsation, the operating point of the working machine, here a centrifugal pump, is determined by the method without the measurement of electrical measured variables.
- Fig. 4a is shown in dependence of a time t, a signal curve of a pressure p (t), which was measured at the outlet of a centrifugal pump during operation of the centrifugal pump. It can be seen that the pressure moves at about the same, constant level.
- Fig. 4b shows this pressure curve p (t) in a detailed view. It can be seen that pressure pulsations are present in the signal course of p (t). According to the invention, it has been recognized that these pressure pulsations can be detected by commercially available pressure sensors for measuring a static pressure. Such pressure sensors are already attached to many pumps, in particular to detect their final pressure. Such a pressure sensor detects a pulsating portion of the pressure signal. The frequency of the pulsating pressure component, the rotational sound frequency f D , results from the reciprocal of the period T. The method according to the invention determines the frequency of the pulsating pressure component in a frequency range of interest.
- the frequency range is predetermined by the limits of lower and upper rotary sound frequency f D_min and f D_max .
- f d_min n min ⁇ z
- f d_max n Max ⁇ z
- an accurate determination of the rotational frequency is preferably carried out with an accuracy of one tenth of a hertz or even a few hundredths of a hertz. This is achieved either by means of a very high sampling frequency and / or by a correspondingly long sampling interval.
- the rotary sound frequency f D is determined by means of signal analysis, in particular frequency analysis, for example by a fast Fourier transformation (FFT) or an autocorrelation analysis. From the rotary sound frequency f D , as already explained, the drive speed n of the centrifugal pump or of the drive motor driving it can be determined.
- FFT fast Fourier transformation
- Fig. 5a shows a speed-torque characteristic M (n), hereinafter also called nM characteristic of an asynchronous motor.
- M (n) the torque M is plotted against the speed n of the asynchronous motor.
- This characteristic curve which is known per se for an asynchronous motor, shows the rated or nominal operating point of an asynchronous motor at a point (M N, n N ) at nominal torque M N and rated speed n N , circled here.
- the torque of the asynchronous motor is equal to 0.
- the motor parameters required for calculating the characteristic curve M (n) or P 2 (n) can be derived from nameplate data of an asynchronous motor. It is of particular advantage, if solely from the nameplate data rated power P 2N and rated speed n N, the course of the nP characteristic is determined. From these two parameters, usually on each asynchronous motor on its nameplate apparent parameters can be derived from the synchronous speed n 0 .
- the tilting moment M k is usually known from the manufacturer or can be roughly set to a suitable multiple, for example, three times the nominal torque.
- the tilting speed n k can be calculated according to formula (5).
- M n M N ⁇ n - n 0 n N - n 0
- the flow rate Q can be determined in a method step 26.
- Fig. 7 shows a schematic representation of an alternative, inventive method 21 using a load-dependent speed-flow characteristic or nQ characteristic.
- n load-dependent speed-flow characteristic
- the number of blades z and a load-dependent speed-flow characteristic n (Q) given by several (i) support values (n _1 ; Q _1 ), (n _2 ; Q _2 ), ... (n _i ; Q _i ) stored.
- n _i load-dependent speed-flow characteristic
- the respective operating speed can be determined and stored for a plurality of operating points with a known flow rate, including, for example, Q 0 , Q max .
- a detection 22 of a measured variable and the process steps 23 and 24 the input speed n of the machine is determined.
- the in Fig. 7 The method will now be shown in a step 27 with the aid of the supporting values (n _1; Q _1); determined, ...
- Fig. 9 shows a combined method for the determination of Q, which performs an operating point determination, both from the head H and from the power P 2 .
- the pressure pulsation of the pressure-side pressure p 2 is used to determine the shaft power P 2 and the flow rate Q.
- the procedure again contains those already in Fig. 3 described process steps 23, 24 and 25.
- a data memory 30 are in turn the already in Fig. 3 stored parameters and the QP characteristic.
- the delivery flow / delivery head characteristic, the QH characteristic, the centrifugal pump is stored.
- the support table for the QP characteristic is supplemented by corresponding head heights H _1 , H _2 ... H _i .
- the flow rate is determined by a combined process from the flow rate-delivery height characteristic curve and the delivery flow rate performance curve of the centrifugal pump.
- the required delivery height H is calculated in a method step 15 from end pressure p 2 and suction pressure p 1 .
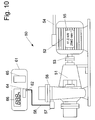
- Fig. 10 shows a centrifugal pump assembly 50, in which a centrifugal pump 51 is connected via a shaft 53 with an asynchronous motor 52 which drives the centrifugal pump 51.
- the asynchronous motor 52 is fed by a mains supply line 54.
- the asynchronous motor 52 has a nameplate 55 with characteristic characteristics of the asynchronous motor 52.
- a pressure sensor 57 for measuring the pressure-side pressure or discharge pressure of the centrifugal pump 51 is arranged at a discharge port 56 of the centrifugal pump 51.
- the pressure sensor 57 is connected via a line 58 to a device 61 according to the invention.
- the device 61 according to the invention evaluates the measuring signals of the pressure sensor 57 and determines the operating point of the working machine 51.
- the characteristic plate data nominal power P 2N and the nominal rotational speed n N are sufficient as characteristic parameters of the asynchronous motor. All other motor parameters can be derived or calculated from this.
- the device 61 has a suitable for detecting the pressure signals terminal or signal input 62. It has proved to be expedient to interpret the signal input 62 for signal components up to 500 Hz. Such an input is less expensive than a high dynamic input capable of detecting signals in the frequency range of several kilohertz, and offers the possibility of sufficiently fast and sensitive signal detection. Furthermore, the device 61 has a signal processing unit 64 which determines the rotational sound frequency f D with sufficient accuracy.
- the signal processing unit 64 is capable of determining the rotational sound frequency with an accuracy of one tenth of a hertz or a few hundredths of a hertz. It has a high sampling frequency and / or correspondingly long sampling intervals.
- the running in the device 61 process is controlled and coordinated by a computing unit 65.
- the device 61 has a display and / or operating unit 66.
- a further pressure sensor connection not shown here, may be provided, which serves for example for detecting a pump suction pressure.
- the device further, not shown signal inputs and / or a serial bus interface, for example, for reading or reading parameters, have.
- Fig. 11 shows a centrifugal pump assembly consisting of centrifugal pump 51 and asynchronous motor 52, and an apparatus for operating point determination in the form of a Mobile phones 71.
- the mobile telephone 71 has an integrated microphone 72.
- the mobile phone 71 uses the inventive method in this embodiment.
- a corresponding program sequence can be stored in a data memory of the mobile telephone 71, not shown here, which is processed by a computer unit (not shown here) located in the mobile telephone.
- the device can also, as in Fig. 12 represented spatially separated from a work machine determine its operating point.
- Fig. 12 is the same centrifugal pump arrangement as in Fig. 11 consisting of centrifugal pump 51 and asynchronous motor 52, shown.
- a mobile phone 71 with integrated microphone 72 detects at a marked by dashed line location 78 of the centrifugal pump 51 and the induction motor 52, the operating noise of the work machine 51.
- the mobile phone 71 detects the airborne sound signals of the working machine 51.
- a device 61 for operating point determination is spatially separated from the working machine 51, at a location 79 where the operating point determination is performed.
- the device 61 uses telecommunications means, which serve as signal transmission means to perform the operating point determination spatially separated from the working machine 51.
- the airborne sound signals of the centrifugal pump 51 detected by the mobile telephone 71 are transmitted or transmitted by means of telecommunication network 77 to the device 61.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Non-Positive-Displacement Pumps (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
Description
- Die Erfindung betrifft ein Verfahren zur Bestimmung eines Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors, wobei eine von der Arbeitsmaschine aufgenommene Leistung und/oder deren Fördermenge einen Betriebspunkt charakterisiert, ein oder mehrere betriebspunktabhängige Messgrößen der Arbeitsmaschine durch ein oder mehrere Sensoren erfasst werden und die Messwerte während eines Betriebs der Arbeitsmaschine ausgewertet und/oder gespeichert werden. Die Erfindung betrifft weiter ein Verfahren zur Überwachung eines Betriebspunkts. Die Erfindung betrifft ferner eine Vorrichtung zur Durchführung des Verfahrens.
- Um einen sicheren und effizienten Betrieb einer Arbeitsmaschine zu gewährleisten, muss deren Betriebspunkt bekannt sein.
- Beim Betrieb einer Pumpenanordnung, insbesondere einer Kreiselpumpenanordnung, bestehend aus Pumpe und diese antreibende Asynchronmaschine, ist häufig eine Aussage über deren Betriebspunkt erforderlich. Der Betriebspunkt einer Strömungsarbeitsmaschine, insbesondere einer Kreiselpumpe, auf deren Förderstrom-Förderhöhen-Kennlinie oder Q-H-Kennlinie, ist insbesondere durch deren Förderstrom, nachfolgend auch Fördermenge genannt, charakterisiert. Zu dessen Ermittlung gibt es verschiedene Möglichkeiten. Er kann über die Messung des Förderstroms oder durch eine Druckmessung bestimmt werden. Bei Letzterer wird üblicherweise die Differenz des Druckes zwischen Druck- und Saugseite der Pumpe gemessen. Die Förderhöhe wird als Quotient aus Druckdifferenz, Dichte und Erdbeschleunigung abgeschätzt. Bei Wasser als Förderfluid entspricht eine Druckdifferenz von 1 bar einer Förderhöhe von ca. 10 Metern. Weiterhin wird ein Betriebspunkt einer Kreiselpumpe durch eine elektrische Messung bestimmt, wobei aus einer Strom- und Spannungsmessung die abgegebene Motorleistung unter Berücksichtigung des Wirkungsgrades des Motors berechnet wird.
- Eine direkte Messung der Fördermenge erfordert gewöhnlich magnetisch-induktive Durchflussmessgeräte. Eine indirekte Bestimmung der Fördermenge auf rechnerischem Wege ist mit zusätzlichen Schwierigkeiten verbunden. Wird eine Fördermenge beispielsweise aus den Werten einer Förderstrom-Förderhöhen-Kennlinie, einer Q-H-Kennlinie, bei dem die Förderhöhe H über den Förderstrom aufgetragen ist oder einer Förderstrom-Leistungs-Kennlinie, einer Q-P-Kennlinie, bei dem die Leistung P über den Förderstrom Q aufgetragen ist, abgeleitet, so ist dies schwierig oder gar unmöglich in denjenigen Fällen, in denen eine flache oder eine nicht stetig steigende Q-H-Kennlinie oder Q-P-Kennlinie vorliegt. Soll die Fördermenge mit gemessenen Drücken aus der Q-H-Kennlinie einer Kreiselpumpe bestimmt werden, so muss die Q-H-Kennlinie eindeutig sein, also jedem H-Wert genau ein Q-Wert zuordenbar sein. In der Praxis ist diese Bedingung oft nicht erfüllt. Q-H-Kennlinien sind entweder zu flach oder gar uneindeutig. Selbiges Problem besteht auch, wenn der Förderstrom Q mittels einer gemessenen Leistungsaufnahme aus der Förderstrom-Leistungs-Kennlinie, der Q-P-Kennlinie, bestimmt werden soll. Auch der Verlauf der Q-P-Kennlinie ist oft flach oder gar uneindeutig.
- Durch die
WO 2005/064167 A1 ist eine Kombination vorstehender Verfahren bekannt. Diese bedingt einen erheblichen messtechnischen Aufwand, da sowohl der Differenzdruck der Pumpe als auch eine elektrische Leistung gemessen werden muss. - Die Messung der elektrischen Leistungsaufnahme eines Motor-Pumpenaggregats ist in der Praxis mit einigem Aufwand verbunden. Die Wirkleistungsmessung erfolgt in einem Schaltschrank, beansprucht dort Platz, insbesondere für die Messung des Motorstroms durch Stromwandler, und bedingt einen Montageaufwand, der durch eine Elektrofachkraft zu leisten ist.
- Eine Anordnung und ein Verfahren zur Bestimmung der Leistung und/oder des Moments von Induktionsmotoren ist in der
DD 258 467 A1 - Durch die
DE 10 2006 049 440 A1 ist ein Verfahren zur Erkennung eines Betriebszustandes einer Pumpe, insbesondere einer Fliehkraft- oder Verdrängungspumpe, in einer Pumpenanlage bekannt. Das Verfahren und dessen Vorrichtung dienen, im Vergleich zu einem gespeicherten Normalzustand, einer Erkennung eines fehlerhaften Betriebszustandes einer Pumpe, Pumpenanlage und hydraulischen Anlage. Ein Drucksensor erfasst den zeitlichen Druckverlauf im Fördermedium. Ein berechneter Kennwert charakterisiert die Pulsation des Druck- und/oder Strömungsverlaufs in einem Berechnungs-Zeitintervall. Durch Vergleich des berechneten Kennwertes mit mindestens einem vorgegebenen Kennwert oder mit einem von diesem begrenzten Kennwertbereich, wobei der vorgegebene Kennwert oder der durch diesen begrenzte Kennwertbereich einem interessierenden Betriebszustand der Pumpe entspricht, wird der Betriebszustand ermittelt und ausgegeben. Bei einem Diagnosegerät mit angeschlossenem Drucksensor und einem zusätzlichen Schwingungssensor wird aus dem Drucksensorsignal die Drehzahl der Pumpe ermittelt und dem Schwingungssensor bereitgestellt. Die Gründe dafür werden nicht offenbart. Weder die Drehzahlinformation noch irgendwelche anderen Größen liefern eine Aussage darüber, in welchem Betriebspunkt auf einer Q-H- bzw. Q-P-Kennlinie und/oder bei welcher aufgenommenen Leistung die Pumpe betrieben wird. Mit diesem Verfahren werden nur Abweichungen von vorher ermittelten und gespeicherten Referenzwerten angezeigt. - Die
DE 196 18 462 A1 offenbart ein weiteres Verfahren und eine Vorrichtung zum Bestimmen eines extrinsischen Leistungsparameters einer energieumwandelnden Vorrichtung wie den Volumen- oder Massendurchfluß durch eine motorangetriebene Kreiselpumpe, bei dem fortlaufend eine betriebszustandsabhängige intrinsische Größe ermittelt wird. - Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren und eine Vorrichtung zur Verfügung zu stellen, durch die eine wenig aufwändige und zuverlässige Bestimmung und gegebenenfalls Überwachung des aktuellen Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors möglich ist.
- Diese Aufgabe wird erfindungsgemäß dadurch gelöst, dass der Betriebspunkt ohne die Verwendung von elektrischen Messgrößen des antreibenden Asynchronmotors bestimmt wird, dass aus einer mechanischen Messgröße Druck, Differenzdruck, Kraft, Vibration, Körperschall oder Luftschall, mittels einer Signalanalyse, insbesondere einer Frequenzanalyse, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz ermittelt wird, wobei daraus die Drehzahl der Antriebsmaschine ermittelt wird und aus der schlupfbedingten Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors der Betriebspunkt bestimmt wird.
- Der Betriebspunkt wird erfindungsgemäß ohne eine Verwendung von elektrischen Messgrößen bestimmt. Stattdessen wird aus dem Signalverlauf einer gemessenen mechanischen Messgröße eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz ermittelt, insbesondere die Drehklangfrequenz der Arbeitsmaschine. Nachfolgend wird vereinfachend von Drehklangfrequenz gesprochen. Diese ergibt sich aus dem Produkt von Drehzahl und einer Anzahl von schwingungsanregenden Strukturen eines oszillierenden oder rotierenden Bauteils, insbesondere die Schaufelanzahl eines Pumpenlaufrades. Daraus wird die Drehzahl der Antriebsmaschine ermittelt und unter Zuhilfenahme von gespeicherten Daten die von der Arbeitsmaschine aufgenommene Leistung, nachfolgend auch Wellenleistung genannt, und/oder deren Fördermenge bestimmt. Als mechanische Messgrößen sind Druck, insbesondere der Druck auf der Druckseite einer Kreiselpumpe, Differenzdruck, insbesondere der Differenzdruck zwischen Saug- und Druckseite einer Kreiselpumpe, Kraft, Vibration, Körperschall oder Luftschall, insbesondere einer oder verursacht durch eine Kreiselpumpe, oder dergleichen geeignet. Der Betriebspunkt der Arbeitsmaschine kann aus einer einzigen, nicht elektrischen Messgröße ermittelt werden. Durch den Verzicht auf elektrische Messgrößen ist das erfindungsgemäße Verfahren zur Betriebspunktbestimmung vergleichsweise kostengünstig und mit einfachstem Installationsaufwand durchführbar.
- Eine Ausgestaltung der Erfindung sieht vor, dass die aufgenommene Leistung der Arbeitsmaschine durch folgende Schritte bestimmt wird:
- Bestimmung der Drehzahl-Drehmoment-Kennlinie des Motors, insbesondere durch vorgegebene Motorparameter Bemessungsleistung und Bemessungsdrehzahl, gegebenenfalls synchrone Drehzahl, Kippmoment, Kippdrehzahl oder Kippschlupf.
- Bestimmung der aufgenommenen Leistung oder des Drehmomentes des Motors aus ermittelter Antriebsdrehzahl und Drehzahl-Drehmoment-Kennlinie des Motors.
- Notwendige Parameter zur Bestimmung der Drehzahl-Drehmoment-Kennlinie des Motors werden aus den Typenschilddaten eines Asynchronmotors abgeleitet, beispielsweise ergibt sich das Bemessungs- oder Nenndrehmoment MN aus dem Quotienten von Bemessungsleistung des Asynchronmotors P2N und Nenndrehzahl nN zu:

- Bei bekanntem Kippmoment MK und/oder Kippschlupf sK des Asynchronmotors wird mit der Kloss'schen Gleichung

- die Drehzahl-Drehmoment-Kennlinie, n-M-Kennlinie des Asynchronmotors abgebildet. Mit dem Schlupf s des Asynchronmotors

ergibt sich der Verlauf der n-M-Kennlinie zu
mit der Kippdrehzahl nk
- Alternativ kann im Betriebsbereich der Arbeitsmaschine die Drehzahl-Drehmoment-Kennlinie des Asynchronmotors als Gerade durch die Punkte (MN; nN), gegeben durch Nennmoment MN bei Nenndrehzahl nN, und (M = 0; n0), gegeben durch Drehmoment M gleich Null bei synchroner Drehzahl n0, angenähert werden. Es ergibt sich dann folgende, angenäherte oder vereinfachte Drehzahl-Drehmoment-Kennlinie, n-M-Kennlinie, des Asynchronmotors, deren Verlauf durch folgende Formel beschrieben ist:

- Die Bestimmung der von der Arbeitsmaschine aufgenommenen Leistung erfolgt aus der zuvor ermittelten Antriebsdrehzahl, nachfolgend auch Wellendrehzahl genannt, und der Drehzahl-Drehmoment-Kennlinie, der n-M-Kennlinie des Motors. Dieser Zusammenhang Wellenleistung P2 zu Drehmoment M und Drehzahl n ist durch die Gleichung

gegeben. Erfindungsgemäß wird der Betriebspunkt einer Arbeitsmaschine, insbesondere einer Pumpe, charakterisiert durch deren aufgenommene Leistung, ermittelt. Dies erfolgt mit vorhandenen, an einer Pumpe angeordneten Sensoren. - Eine vorteilhafte Ausgestaltung sieht bei einer Pumpe, insbesondere einer Kreiselpumpe, als Arbeitsmaschine die Ermittlung von deren Fördermenge aus deren Antriebsdrehzahl vor. Aus dem Signalverlauf einer nicht elektrischen Messgröße wird die Drehklangfrequenz mittels Signalanalyse, insbesondere Frequenzanalyse, beispielsweise durch eine Fast-Fourier-Transformation (FFT) oder eine Autokorrelation ermittelt. Daraus wird die Antriebsdrehzahl ermittelt. Im Beispiel einer Kreiselpumpe als Arbeitsmaschine ergibt sich die Drehzahl als dem Quotient aus Drehklangfrequenz fD und Schaufelzahl z des Laufrades:

- Mittels der Drehzahl-Drehmoment-Abhängkeit können Wellenleistung und/oder Fördermenge aus der Drehzahl bestimmt werden. Auf eine Messung elektrischer Größen wird verzichtet, wodurch sich der Aufwand für die Durchführung der Betriebspunktbestimmung gegenüber einer herkömmlichen Betriebspunktbestimmung auf Basis einer elektrischen Wirkleistungsmessung erheblich reduziert. Ebenso besteht gegenüber einer direkten Messung der Fördermenge, beispielsweise mittels Ultraschall-Durchflussmesstechnik oder magnetisch-induktiver Durchflussmesstechnik, ein erheblicher Kostenvorteil, da die verwendeten mechanischen Messgrößen Druck, Differenzdruck, Kraft, Vibration, Körperschall oder Luftschall günstiger erfasst und verarbeitet werden.
- Es hat sich als zweckmäßig eniviesen, dass die Fördermenge der Pumpe aus der aus der Antriebsdrehzahl ermittelten aufgenommenen Leistung oder Wellenleistung bestimmt wird. Aus der Antriebsdrehzahl oder Wellendrehzahl wird zunächst wie zuvor beschrieben unter Zuhilfenahme der bekannten n-M-Kennlinie oder einer daraus ableitbaren n-P-Kennlinie gemäß Formel (7) die Wellenleistung der Pumpe ermittelt. In einem nachfolgenden Schritt wird aus der Wellenleistung mittels einer abgespeicherten Q-P-Kennlinie die Fördermenge Q der Pumpe ermittelt.
- Die Fördermenge der Pumpe kann aus Parametern des Motors, die eine Drehzahl-Drehmoment-Kennlinie des Motors beschreiben, sowie aus Parametern der Pumpe, die eine Förderstrom-Leistungs-Kennlinie beschreiben, und der Antriebsdrehzahl bestimmt werden. Eine Q-P-Kennlinie ist beispielsweise in Form einer Parametertabelle mit mehreren Stützpunkten (Index _1 bis _i) beschreibbar. Während der Betriebspunktbestimmung nutzt das Verfahren eine solche vorab gespeicherte Tabelle, um die Fördermenge aus der Wellenleistung zu bestimmen:
Fördermenge Q Q_1 Q_2 Q_3 ... Q_i Wellenleistung P2 P2_1 P2_2 P2_3 ... P2_i - Die Tabelle kann zusätzlich Stützpunkte für die jeweilige Drehzahl beinhalten, womit eine direkte Förderstrombestimmung aus der ermittelten Drehzahl möglich wird.
- Insbesondere bei uneindeutigen Bereichen der Q-P-Kennlinie kann zur weiteren Verbesserung des Verfahrens zusätzlich die Förderhöhe oder der Differenzdruck zur Bestimmung der Fördermenge der Pumpe herangezogen werden. Weiterhin kann bei der Bestimmung des Betriebspunktes sowohl eine Berücksichtigung der Q-P-Kennlinie als auch der Q-H-Kennlinie stattfinden. Dazu können beispielsweise Quotientenwerte P2/H abgespeichert werden:
Fördermenge Q Q_1 Q_2 Q_3 ... Q_i Wellenleistung P2 P2_1 P2_2 P2_3 ... P2_i Förderhöhe H H_1 H_2 H_3 ... H_i Quotient P2/H P2_1/ H_1 P2_2/ H_2 P2_2/ H_2 ... P2_i/ H_i - Ebenfalls ist vorgesehen, die Fördermenge der Kreiselpumpe aus einer Kennlinie, die die lastabhängige Drehzahländerung über der Fördermenge der Pumpe darstellt, zu bestimmen. Eine solche Drehzahl-Förderstrom-Kennlinie kann aus einer Drehzahl-Drehmoment-Kennlinie des Motors in Verbindung mit einer Förderstrom-Leistungs-Kennlinie berechnet werden.
Fördermenge Q Q_1 Q_2 Q_3 ... Q_i Wellenleistung P2 P2_1 P2_2 P2_3 ... P2_i Drehzahl n n_1 n_2 n_3 ... n_i - Alternativ kann auch ohne Kenntnis von Q-P- und Q-H-Kennlinie eine Kennlinie zur Bestimmung der Fördermenge aus der lastabhängigen Drehzahländerung bestimmt werden. Dazu können in einem Testlauf der Pumpe, der beispielsweise bei einer Inbetriebnahme erfolgt, in mehreren Betriebspunkten mit bekannter Fördermenge, darunter beispielsweise Q0, d.h. Förderstrom gleich Null, und Qmax, d. h. maximal zulässigem Förderstrom, die jeweilige Betriebsdrehzahl ermittelt und gespeichert werden. Daraus ergibt sich nachfolgend allgemein dargestellte Parametertabelle:
Fördermenge Q Q_1 Q_2 Q_3 ... Q_i Drehzahl n n_1 n_2 n_3 ... n_i - Alternativ ist es möglich, dass während des regulären Betriebs der Pumpe "lernend" Drehzahlen ermittelt und gespeichert werden. So wird bei einer Kreiselpumpe mit einer Q-P-Kennlinie, bei der P proportional mit Q streng monoton ansteigt, wie beispielsweise bei den meisten Pumpen mit Radialrad, die größte auftretende Drehzahl der kleinsten auftretenden Leistungsaufnahme und dem kleinsten Förderstrom zugeordnet, gegebenenfalls bei geschlossenem Ventil also Nullförderstrom. Verringert sich die Drehzahl im Betrieb wieder, so wird auf einen gestiegenen Förderstrom geschlossen. Somit wird über die Betriebsdauer einer Kreiselpumpe ein Betriebsbereich in den Grenzen von (Qmin'; nmax') und (Qmax'; nmin'), die im untersuchten Betriebszeitraum auftreten, erlernt, ohne dass dazu konkrete Werte für Q gemessen oder ermittelt werden. Die erlernten Grenzwerte werden zur Einordnung des jeweils gegenwärtigen Förderstroms der Kreiselpumpe zwischen minimalem und maximalem im untersuchten Betriebszeitraum aufgetretenen Förderstrom Qmin' und Qmax' verwandt.
- Nach dieser Ausgestaltung wird ebenfalls die Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors verwendet. Die Erfindung nutzt dabei die Erkenntnis, dass diese eine auswertbare Drehzahländerung über den Förderstrombereich bewirkt. Mit einer solchen Kennlinie, die üblicherweise für eine Pumpe nicht dokumentiert ist, kann die Fördermenge der Kreiselpumpe direkt aus der Drehzahl ermittelt werden.
- Besonders zuverlässig ist ein Verfahren, wonach die Antriebsdrehzahl oder Wellendrehzahl zur Bestimmung des Betriebspunktes der Pumpe, insbesondere der Kreiselpumpe, aus Messwerten von ein oder mehreren Drucksensoren ermittelt wird. Zweckmäßig ist dabei, dass die Drucksensoren zur dynamischen Messung von Drücken, insbesondere von pulsierenden Drücken, geeignet sind. Der durch die Wellenleistung und/oder Fördermenge charakterisierte Betriebspunkt der Pumpe, insbesondere Kreiselpumpe, wird also alleine aus Messwerten von ein oder mehreren Drucksensoren ermittelt. An einer Kreiselpumpe kommen ein oder mehrere Drucksensoren zum Einsatz, um den Saug- und/oder Enddruck einer Kreiselpumpe zu erfassen. Drucksensoren, wenngleich zur Messung statischer Drücke vorgesehen, sind ebenfalls meist geeignet zur dynamischen Messung von Drücken. Tests haben gezeigt, dass Standard-Drucksensoren Drücke dynamisch und unbedämpft bis zu einem Frequenzbereich von ca. 1 kHz erfassen. Solche Drucksensoren sind in der Lage, innerhalb einer Kreiselpumpe auftretende pulsierende Drücke zu erfassen. Das erfindungsgemäße Verfahren erzielt für viele Anwendungen bei Verwendung von nur einem Drucksensor auf der Druckseite der Pumpe eine ausreichende Genauigkeit. Zusätzlich kann ein Drucksensor auf der Saugseite der Pumpe vorgesehen werden. Ebenfalls ist vorgesehen einen Pumpendifferenzdruck zwischen Druck- und Saugseite der Pumpe, erhältlich durch einen Differenzdrucksensor, auszuwerten. Durch das erfindungsgemäße Verfahren kann der Betriebspunkt kostengünstig ohne die Verwendung von zusätzlichen Sensoren alleine aus einem oder mehreren Drucksensorsignalen bestimmt werden.
- Eine andere Ausgestaltung sieht vor, dass die Antriebsdrehzahl zur Bestimmung des Betriebspunktes der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors aus Messwerten von ein oder mehreren Körperschall- und/oder Luftschallsensoren ermittelt wird. Dabei können die Körperschall- und/oder Luftschallsensoren an der Arbeitsmaschine und/oder am diese antreibenden Asynchronmotor angeordnet sein. Die Sensoren können auch im Umfeld der Arbeitsmaschine angeordnet sein. In jedem Fall wird aus Signalen der Sensoren, die mechanische Messgrößen erfassen, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz erfasst, woraus die Drehzahl der Arbeitsmaschine ermittelt wird. Und daraus wird unter Verwendung der Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors der Betriebspunkt ermittelt.
- Ein ermittelter Betriebspunkt kann nach der Erfindung daraufhin überwacht werden, ob sich dieser innerhalb oder außerhalb eines vorgegebenen, zulässigen Bereichs befindet. Anhand eines außerhalb eines vorgegebenen Bereichs befindlichen Betriebspunkts wird ein fehlerhafter Betriebszustand, insbesondere Über- oder Unterlast, der Arbeitsmaschine und/oder des Asynchronmotors erkannt. Durch eine Überwachung oder Auswertung der Leistungsaufnahme einer Kreiselpumpe kann beispielsweise auf einen Betrieb bei Teillast oder einen Betrieb im Optimum geschlossen werden. Bei Verwendung von Körperschall oder Luftschall als Messgröße kann auch ein Trockenlauf der Kreiselpumpe detektiert werden. Versuche haben gezeigt, dass die erfindungsgemäße Detektion einer Überlast eines Asynchronmotors zuverlässig und robust funktioniert. Bei einer im Vergleich zu einer dokumentierten und parametrierten Leistungsaufnahme erhöhten Leistungsaufnahme kann auf Überlast der Pumpe oder des Motors geschlossen werden. Zwar kann Ursache für eine vermeintlich erhöhte Leistungsaufnahme auch eine versorgungsseitige Unterspannung sein, was zu einem erhöhten Schlupf führt. In einem solchen Fall ist die Diagnose Überlast für das Aggregat, bestehend aus Pumpe und Motor dennoch zutreffend, da bei Unterspannung und somit erhöhtem Schlupf die Stromaufnahme des Motors erhöht ist. Dieser Einfluss ist dann signifikant, wenn die Netzspannung außerhalb der Toleranzen liegt, und beispielsweise um mehr als 10 % unterhalb der Nennspannung liegt. In einem solchen Fall würde bei Nenndrehzahl n = nN auf Nennleistung P2 = P2N geschlossen, obwohl die tatsächlich aufgenommene Leistung unterhalb der Nennleistung liegt. Sinkt die Drehzahl weiter ab, d.h. n < nN, so wird auf Überlastung der Pumpe oder des Motors geschlossen, was korrekt ist, da die stromproportionalen Verluste, insbesondere die Rotorverluste des Asynchronmotors ansteigen, was zur übermäßigen Erwärmung des Motors beiträgt.
- Bei einer Vorrichtung zur Bestimmung eines Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors, die mit ein oder mehreren Eingängen zur Erfassung von betriebspunktabhängigen Messgrößen versehen ist, ist es erfindungsgemäß vorgesehen, dass die Vorrichtung einen Datenspeicher für technologische Daten der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors aufweist und aus einer mechanischen Messgröße Druck, Differenzdruck, Kraft, Vibration, Körperschall oder Luftschall mittels einer Signalanalyse, insbesondere einer Frequenzanalyse, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz ermittelt, daraus die Drehzahl der Antriebsmaschine ermittelt und daraus unter Verwendung der schlupfbedingten Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors den Betriebspunkt aus nicht elektrischen Messgrößen, ohne die Verwendung von elektrischen Messgrößen des antreibenden Asynchronmotors, bestimmt und gegebenenfalls überwacht.
- In dem Datenspeicher können Motorparameter, die die Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors beschreiben, und/oder andere technologische Daten der Arbeitsmaschinenanordnung abgespeichert sein. Auf diese kann während des Betriebs der Arbeitsmaschine zwecks Bestimmung des Betriebspunkts zugegriffen werden. Eine Erfassung von elektrischen Messgrößen durch die Vorrichtung ist nicht notwendig. Die Vorrichtung kann aus einem einzigen Messsignal, beispielsweise einem Drucksensorsignal, den Betriebspunkt der Arbeitsmaschine bestimmen.
- Nach einer Ausgestaltung der Erfindung bestimmt die Vorrichtung die aufgenommene Leistung der Arbeitsmaschine durch folgende Schritte:
- Bestimmung der Drehzahl-Drehmoment-Kennlinie des Motors, insbesondere durch vorgegebene Motorparameter Bemessungsleistung und Bemessungsdrehzahl, gegebenenfalls synchrone Drehzahl, Kippmoment, Kippdrehzahl oder Kippschlupf
- Bestimmung der aufgenommenen Leistung oder des Drehmomentes des Motors aus der Antriebsdrehzahl und der Drehzahl-Drehmoment-Kennlinie des Motors.
- Bei einer Pumpe, insbesondere einer Kreiselpumpe, als Arbeitsmaschine ist es vorgesehen, dass die Ermittlung einer Fördermenge der Pumpe aus der Antriebsdrehzahl erfolgt. An der Pumpe werden lediglich mechanische Messgrößen erfasst. Aus der ermittelten Drehklangfrequenz wird die Antriebs- oder Wellendrehzahl der Pumpe ermittelt.
- Gegenüber einer direkten Messung der Fördermenge beispielsweise mittels Ultraschall-Durchflussmesstechnik oder magnetisch-induktiver Durchflussmesstechnik besteht ein erheblicher Kostenvorteil. Auch gegenüber einer Ermittlung der Fördermenge auf Basis einer elektrischen Wirkleistungsmessung sind Aufwand und Kosten minimiert.
- Die Vorrichtung kann an der Pumpe, an deren Antriebsmotor oder in deren Umfeld angeordnet sein und/oder mit der Pumpe oder deren Antriebsmotor integriert ausgeführt sein.
- Die Vorrichtung kann die Fördermenge der Pumpe, insbesondere Kreiselpumpe, aus der aus der Antriebsdrehzahl oder Wellendrehzahl ermittelten aufgenommen Leistung oder Wellenleistung bestimmen.
- Es hat sich als zweckmäßig erwiesen, dass die Vorrichtung die Fördermenge der Pumpe, insbesondere Kreiselpumpe, aus Parametern des Motors, die eine Drehzahl-Drehmoment-Kennlinie des Motors beschreiben, sowie aus Parametern der Pumpe, die eine Förderstrom-Leistungs-Kennlinie beschreiben, und der Antriebsdrehzahl oder Wellendrehzahl bestimmt.
- Ebenso gut ist es vorgesehen, dass die Vorrichtung die Fördermenge der Pumpe, insbesondere Kreiselpumpe, direkt aus einer Kennlinie, die die lastabhängige Drehzahländerung über der Fördermenge der Pumpe darstellt, bestimmt. Eine solche Kennlinie kann durch Testläufe ermittelt und in dem Datenspeicher gespeichert sein, so dass sie während des Betriebs der Kreiselpumpe abrufbar ist. Hier wird gleichwohl die Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors verwendet, die zu einer Drehzahlveränderung über den Förderstrombereich führt. Daraus kann der durch die von der Arbeitsmaschine aufgenommene Leistung und/oder deren Fördermenge charakterisierte Betriebspunkt besonders einfach bestimmt werden.
- Ideal ist es, wenn die Vorrichtung mindestens einen Anschluss für einen Drucksensor aufweist und aus Messwerten eines angeschlossenen Drucksensors die Antriebsdrehzahl oder Wellendrehzahl zur Bestimmung des Betriebspunktes der Arbeitsmaschine ermittelt. Drucksensoren zur Erfassung statischer Drücke sind ebenfalls im Stande, dynamische Druckschwankungen zu erfassen. Solche Drucksensoren sind ohnehin an vielen Pumpen angebracht, insbesondere um deren Enddruck zu erfassen. Übliche Einrichtungen zur Erfassung von Signalen von Drucksensoren mittels Analogeingängen beispielsweise an Speicherprogrammierbaren Steuerungen oder an Frequenzumrichtern ermöglichen in der Regel die Nutzung von gefilterten, d.h. in der Dynamik bedämpften Messwerten. Zur Erfassung des erfindungsgemäß interessierenden dynamischen Drucksignalanteils sind solche Eingänge zu langsam und unempfindlich. Hochdynamische Eingänge von Messeinrichtungen, die in der Lage sind Signalanteile in Frequenzbereichen von einigen Kilohertz zu erfassen, sind in der industriellen Praxis zumeist nicht robust genug und außerdem teuer.
- Die Vorrichtung nach der Erfindung unterscheidet sich von den erwähnten industriell Üblichen, dadurch, dass sie eine Erfassung des pulsierenden Anteils eines Drucksignals bei gleichzeitig hoher Dynamik ermöglicht. Dadurch ist eine genaue Bestimmung der Frequenz des pulsierenden Druckanteils in einem interessierenden Frequenzbereich gewährleistet. Zweckmäßigerweise besitzt die Vorrichtung einen Eingang für Signalanteile bis zu ca. 500 Hz, wobei eine Grenzfrequenz für einen Eingangsfilter entsprechend höher liegt.
- Als vorteilhaft hat es sich erwiesen, dass der für eine bestimmte Pumpe interessierende Frequenzbereich ein kleiner, durch untere und obere Drehklangfrequenz fD_min beziehungsweise fD_max begrenzter Ausschnitt des gesamten gemessenen Frequenzbereichs ist. Eine Auswertung kann damit entsprechend selektiv und genau erfolgen. In einem Beispiel einer Kreiselpumpe ist der interessierende Frequenzbereich vorgegeben durch die Grenzen von unterer und oberer Drehklangfrequenz fD_min beziehungsweise fD_max bei bekannter Schaufelzahl z:

- Dabei sind minimale Drehzahl nmin und maximale Drehzahl nmax aus Parametern des die Kreiselpumpe antreibenden Asynchronmotors bekannt. Vereinfacht kann die minimale Drehzahl aus nN berechnet werden, beispielsweise

- Und/oder die maximale Drehzahl kann als

angenommen werden. - Mit der Wirkungsgradoptimierung von Asynchronmotoren geht die Minimierung des Schlupfes als Abweichung der Wellendrehzahl von der synchronen Drehzahl einher. IEC-Normmotoren mit einer Nennleistung von 22 kW und größer haben üblicherweise einen Nennschlupf von unter 2%, bei größeren Leistungen ist der Schlupf noch geringer und kann sogar unter 1 % liegen. Daraus folgt, dass minimale und maximale Drehzahl und minimale und maximale Drehklangfrequenz sehr dicht beieinander liegen können. Um aus der Drehklangfrequenz einen Betriebspunkt bestimmen zu können, muss diese sehr exakt bestimmt werden. Die Vorrichtung verfügt daher erfindungsgemäß über eine Signalverarbeitungseinheit, die eine genaue Bestimmung der Drehklangfrequenz, vorzugsweise mit einer Genauigkeit von 1/10 Hertz oder von wenigen 1/100 Hertz, durchführt. Dies wird mittels einer sehr hohen Abtastfrequenz und/oder durch ein entsprechend langes Abtastintervall erreicht.
- Dabei ist die Amplitude des pulsierenden Druckanteils relativ gering. In einem konkreten Beispiel beträgt die Amplitude des pulsierenden Signalanteils weniger als 1% des Drucks. Die Vorrichtung löst den Messbereich des Drucksignals entsprechend hoch auf, so dass die Druckpulsation trotz der geringen Amplitude nach Analog-Digital-Wandlung einwandfrei auswertbar ist, d.h. die Drehklangfrequenz bestimmt werden kann. Die erfindungsgemäße Vorrichtung ermöglicht so eine zuverlässige Betriebspunktbestimmung einer Pumpe.
- Alternativ und/oder zusätzlich kann die Vorrichtung mindestens einen Anschluss für einen Körperschall- und/oder Luftschallsensor aufweisen und aus Messwerten eines angeschlossenen Körperschall- und/oder Luftschallsensors die Antriebsdrehzahl zur Bestimmung des Betriebspunktes der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors ermitteln.
- Zur Erfassung von betriebspunktabhängigen Schallmessgrößen ist die Vorrichtung zweckmäßigerweise mit einem Mikrofon verbindbar oder weist ein integriertes Mikrofon auf.
- Dabei ist es von Vorteil, wenn die Vorrichtung ein Telefon, insbesondere ein Mobiltelefon, zur Erfassung der Betriebsgeräusche der Arbeitsmaschine und zur Betriebspunktbestimmung und/oder -überwachung ist. Eine solche Vorrichtung nutzt das erfindungsgemäße Verfahren. Dazu kann in einem Datenspeicher der Vorrichtung ein Programmablauf gespeichert sein, der von einer in der Vorrichtung befindlichen Recheneinheit abgearbeitet werden kann.
- Die Vorrichtung kann auch räumlich getrennt von der Arbeitsmaschine deren Betriebspunkt bestimmen und gegebenenfalls überwachen. Dabei ist es vorgesehen, dass die Vorrichtung Telekommunikationsmittel, insbesondere ein Telefon oder Mobiltelefon und ein Telekommunikationsnetz nutzt, um die Betriebspunktbestimmung und/oder-Überwachung an einem anderen Ort als dem Betriebsort der Arbeitsmaschine durchzuführen. Die Telekommunikationsmittel dienen dabei als Signalerfassungs- und/oder-übertragungsmittel. Beispielsweise kann ein Mobiltelefon mittels eines eingebauten Mikrofons Körperschall- und/oder Luftschallsignale einer Arbeitsmaschine erfassen und mittels Telekommunikationsnetz an eine von der Arbeitsmaschine räumlich getrennte Vorrichtung zur Betriebspunktbestimmung und/oder -überwachung übermitteln.
- Die Erfindung ist mit Vorteil verwendbar bei einer Kreiselpumpenanordnung bestehend aus mindestens einer Kreiselpumpe mit einer Welle und einem die Welle antreibenden Asynchronmotor und mit ein oder mehreren Sensoren zur Erfassung von betriebspunktabhängigen Messgrößen. Die Vorrichtung kann an der Kreiselpumpe angeordnet sein und/oder in die Kreiselpumpe und/oder den Asynchronmotor integriert sein. Auch eine Anordnung im Umfeld der Kreiselpumpenanordnung oder eine räumlich getrennte Anordnung ist vorgesehen.
- Ausführungsbeispiele der Erfindungen sind in den Zeichnungen dargestellt und werden im Folgenden näher beschrieben. Es zeigen die
- Figur 1a
- eine Q-H-Kennlinie einer Kreiselpumpe, die
- Figur 1b
- eine Q-P-Kennlinie einer Kreiselpumpe, die
- Figur 2
- eine allgemeine, schematische Darstellung des erfindungsgemäßen Verfahrens, die
- Figur 3
- eine schematische Darstellung der Verfahrensschritte eines ersten Verfahrens zur Bestimmung eines Betriebspunktes, die
- Figur 4a
- einen Druckverlauf am Austritt einer Kreiselpumpe, die
- Figur 4b
- den Druckverlauf in einer Detailansicht, die
- Figur 5a
- eine Drehzahl-Drehmoment-Kennlinie eines Asynchronmotors, die
- Figur 5b
- eine vereinfachte Drehzahl-Drehmoment-Kennlinie eines Asynchronmotors in dessen Betriebsbereich, die
- Figuren 6a, 6b
- daraus abgeleitete n-P-Kennlinien des Asynchronmotors, die
- Figur 7
- eine schematische Darstellung eines alternativen Verfahrens unter Verwendung einer lastabhängigen Drehzahl-Förderstrom-Kennlinie, die
- Figur 8
- eine lastabhängige Drehzahl-Förderstrom-Kennlinie, die
- Figur 9
- eine schematische Darstellung eines kombinierten Verfahrens zur Betriebspunktbestimmung, die
- Figur 10
- eine Kreiselpumpenanordnung mit einer erfindungsgemäßen Vorrichtung zur Betriebspunktbestimmung aus einer gemessenen Druckpulsation, die
- Figur 11
- eine Kreiselpumpenanordnung mit einer erfindungsgemäßen Vorrichtung zur Betriebspunktbestimmung in Form eines Mobiltelefons, und die
- Figur 12
- eine weitere Anordnung mit einer Vorrichtung, die ein Mobiltelefon und ein Telekommunikationsnetz nutzt, um die Betriebspunktbestimmung an einem anderen Ort als dem Betriebsort der Kreiselpumpe durchzuführen.
- Die
Figur 1 a zeigt eine Förderstrom-Förderhöhen-Kennlinie 2, eine sogenannte Q-H-Kennlinie, einer Kreiselpumpe. Aus einer zwischen Druck- und Saugseite der Kreiselpumpe gemessenen Druckdifferenz kann gemäß dem Stand der Technik eine Förderhöhe H der Pumpe ermittelt und der Betriebspunkt der Kreiselpumpe über die Förderstrom-Förderhöhen-Kennlinie 2 bestimmt werden. Eine solche Betriebspunktbestimmung ist aber unzureichend in einem Bereich kleinerer Förderströme, in dem die Förderstrom-Förderhöhen-Kennlinie 2 uneindeutig oder instabil ist. Eine solche instabile Kennlinie bewirkt, dass bei bestimmten gemessenen Druckdifferenzen zu einer bestimmten Förderhöhe H zwei Förderstromwerte 3, 4 existieren. Somit kann nicht eindeutig auf eine Fördermenge Q(H) der Kreiselpumpe geschlossen werden. -
Fig. 1b zeigt eine Förderstrom-Leistungs-Kennlinie 10, eine sogenannte Q-P-Kennlinie, einer Kreiselpumpe. Die hier gezeigte Förderstrom-Leistungs-Kennlinie 10 ist eindeutig, so dass mit der Information über die Leistungsaufnahme der Pumpe eine Aussage bezüglich der Fördermenge Q(P) der Pumpe und damit über deren Betriebspunkt möglich ist. Die Messung der elektrischen Leistungsaufnahme eines Kreiselpumpenaggregats ist in der Praxis mit einigem Aufwand verbunden, denn diese erfolgt in einem Schaltschrank und bedingt einen Montageaufwand, der durch eine Elektrofachkraft zu leisten ist. Sowohl die Q-H-Kennlinie 2, als auch die Q-P-Kennlinie 10 sind typischerweise für eine bestimmte Kreiselpumpe dokumentiert. -
Fig. 2 zeigt eine allgemeine schematische Darstellung eines erfindungsgemäßen Verfahrens 21, bei dem der Betriebspunkt einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors ohne die Verwendung von elektrischen Messgrößen des antreibenden Asynchronmotors bestimmt wird. Nach einer Erfassung 22 einer mechanischen Messgröße wird in einem Schritt 23 aus der Messgröße mittels einer Signalanalyse, insbesondere Frequenzanalyse, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz, eine Drehklangfrequenz fD ermittelt. Daraus wird in einem nächsten Schritt 24 die Drehzahl n der Antriebsmaschine ermittelt. Und in einem weiteren Schritt 25 wird der durch die von der Arbeitsmaschine aufgenommene Leistung, hier mit P2 bezeichnet, und/oder deren Fördermenge Q charakterisierte Betriebspunkt bestimmt. Erfindungsgemäß wird dazu die schlupfbedingte Drehzahl-Drehmoment-Abhängigkeit des die Arbeitsmaschine antreibenden Asynchronmotors verwendet. Der so bestimmte Betriebspunkt steht in Schritt 29 zur weiteren Verarbeitung und/oder Anzeige zur Verfügung. - Die
Fig. 3 zeigt eine schematische, im Vergleich zuFig. 2 detailliertere Darstellung der Verfahrensschritte eines Verfahrens 21 zur Bestimmung eines Betriebspunktes. Gezeigt ist ein Verfahren 21 zur Bestimmung eines Förderstroms oder einer Fördermenge Q aus einer gemessenen Druckpulsation oder einem gemessenen Körperschall oder Luftschall über ein gespeichertes Motormodell und eine Pumpenkennlinie. Die zur Durchführung der einzelnen Verfahrensschritte notwendigen Parameter können in einem Datenspeicher 30 abgespeichert bzw. hinterlegt sein und stehen zur Durchführung der einzelnen Verfahrensschritte zur Verfügung. Die erforderlichen Motorparameter abgegebene Bemessungs- oder Nennleistung P2N und Nenndrehzahl nN, sowie die optionalen Motorparameter Netzfrequenz f, Polpaarzahl p oder synchrone Drehzahl n0 bilden dabei ein Motormodell, das zweckmäßigerweise in einem ersten Teil 31 des Datenspeichers 30 abgelegt ist. Die synchrone Drehzahl n0 kann auch aus Netzfrequenz f und Polpaarzahl p bestimmt werden oder aus der Nenndrehzahl nN als zu dieser nächst größeren theoretisch möglichen Synchrondrehzahl (beispielsweise 3600 min-1, 3000 min-1, 1800 min-1, 1500 min-1, 1200 min-1, 1000 min-1, 900 min-1, 750 min-1, 600 min-1 oder 500 min-1) abgeleitet werden. Sofern bekannt kann optional das Kippmoment Mk des Motors abgespeichert werden. Weiterhin kann eine minimale Drehzahl nmin und eine maximale Drehzahl nmax abgespeichert werden. In einem zweiten Teil 32 des Datenspeichers 30 ist eine Förderstrom-Leistungs-Kennlinie, eine Q-P-Kennlinie, einer Kreiselpumpe abgespeichert. Diese ist gegeben durch mehrere (i) Stützwerte (P2_1; Q_1), (P2_1; Q_2), ... (P2_i; Q_i). Ebenfalls ist die Schaufelzahl z des Laufrades der Kreiselpumpe verfügbar. Während des Betriebs einer Arbeitsmaschine werden in einem Schritt 22 Messwerte einer mechanischen Messgröße erfasst. In einem Verfahrensschritt 23 wird nun beispielsweise in den Grenzen von fDmin = nmin · z gemäß Formel (9) und fDmax = nmax · z gemäß Formel (10) mittels einer Signalanalyse aus den Signalpulsationen die Drehklangfrequenz fD ermittelt. In einem weiteren Verfahrensschritt 24 wird aus der Drehklangfrequenz fD und der Schaufelzahl z die momentane Antriebsdrehzahl der Pumpe ermittelt. Es gilt:
- Aus der so ermittelten Antriebsdrehzahl n wird in einem nächsten Verfahrensschritt 25 die vom Motor abgegebene Leistung P2 ermittelt. Dabei gilt:

wobei
- Die vom Motor abgegebene Leistung P2 entspricht der Wellenleistung der Pumpe. Somit kann in einem nächsten Verfahrensschritt 26 unter Zuhilfenahme der Q-P-Kennlinie der Pumpe deren Fördermenge Q bestimmt werden. Aus der Messgröße und deren Signalpulsation wird durch das Verfahren der Betriebspunkt der Arbeitsmaschine, hier eine Kreiselpumpe, ohne die Messung von elektrischen Messgrößen bestimmt.
- In
Fig. 4a ist in Abhängigkeit einer Zeit t ein Signalverlauf eines Druckes p(t) dargestellt, der am Austritt einer Kreiselpumpe während eines Betriebs der Kreiselpumpe gemessen wurde. Es ist zu erkennen, dass der Druck sich in etwa auf einem gleich bleibenden, konstanten Niveau bewegt. -
Fig. 4b zeigt diesen Druckverlauf p(t) in einer Detailansicht. Es ist erkennbar, dass im Signalverlauf von p(t) Druckpulsationen vorhanden sind. Erfindungsgemäß wurde erkannt, dass diese Druckpulsationen durch handelsübliche Drucksensoren zur Messung eines statischen Druckes erfasst werden können. Solche Drucksensoren sind ohnehin an vielen Pumpen angebracht, insbesondere um deren Enddruck zu erfassen. Ein solcher Drucksensor erfasst einen pulsierenden Anteil des Drucksignals. Die Frequenz des pulsierenden Druckanteils, die Drehklangfrequenz fD, ergibt sich aus dem Kehrwert der Periodendauer T. Das erfindungsgemäße Verfahren bestimmt die Frequenz des pulsierenden Druckanteils in einem interessierenden Frequenzbereich. Der interessierende Frequenzbereich ist bei bekannter Schaufelzahl z vorgegeben durch die Grenzen von unterer und oberer Drehklangfrequenz fD_min und fD_max. Es gilt:
- Darin sind nmin eine minimale Drehzahl und nmax eine maximale Drehzahl des die Kreiselpumpe antreibenden Asynchronmotors. Diese sind entweder bekannt oder können vereinfacht berechnet werden, beispielsweise durch


wobei n0 die synchrone Drehzahl darstellt. Zur genauen Bestimmung der Drehklangfrequenz innerhalb des interessierenden Frequenzbereichs wird in dem erfindungsgemäßen Verfahren eine genaue Bestimmung der Drehklangfrequenz vorzugsweise mit einer Genauigkeit von einem Zehntel Hertz oder sogar von wenigen Hundertstel Hertz durchgeführt. Dies wird entweder mittels einer sehr hohen Abtastfrequenz und/oder durch ein entsprechend langes Abtastintervall erreicht. Die Drehklangfrequenz fD wird mittels Signalanalyse, insbesondere Frequenzanalyse, beispielsweise durch eine Fast-FourierTransformation (FFT) oder eine Autokorrelationsanalyse ermittelt. Aus der Drehklangfrequenz fD lässt sich, wie bereits dargelegt, die Antriebsdrehzahl n der Kreiselpumpe oder des diese antreibenden Antriebsmotors ermitteln. - Die Figuren
Fig. 5a und5b dienen der Erläuterung des Verfahrensschrittes 25.Fig. 5a zeigt eine Drehzahl-Drehmoment-Kennlinie M(n), nachfolgend auch n-M-Kennlinie genannt, eines Asynchronmotors. Bei einer solchen Drehzahl-Drehmoment-Kennlinie M(n) wird das Drehmoment M über der Drehzahl n des Asynchronmotors aufgetragen. Diese an sich für einen Asynchronmotor bekannte und typische Kennlinie zeigt den Bemesungs- oder Nennbetriebspunkt eines Asynchronmotors bei einem Punkt (MN; nN) bei Nenndrehmoment MN und Nenndrehzahl nN, hier eingekreist. Bei der synchronen Drehzahl n0 ist das Drehmoment des Asynchronmotors gleich 0. Formelmäßig ergibt sich das Drehmoment M(n) zu
-
Fig. 6 a zeigt eine daraus abgeleitete Drehzahl-Leistungs-Kennlinie oder n-P-Kennlinie des Asynchronmotors mit
- Die zur Berechnung der Kennlinie M(n) bzw. P2(n) erforderlichen Motorparameter sind dabei aus Typenschilddaten eines Asynchronmotors ableitbar. Dabei ist es von besonderem Vorteil, wenn alleine aus den Typenschilddaten Bemessungsleistung P2N und Bemessungsdrehzahl nN der Verlauf der n-P-Kennlinie bestimmt wird. Aus diesen beiden, üblicherweise auf jedem Asynchronmotor auf dessen Typenschild ersichtlichen Parametern lässt sich die synchrone Drehzahl n0 ableiten. Das Kippmoment Mk ist üblicherweise aus Herstellerangaben bekannt oder kann überschlägig auf ein geeignetes Vielfaches, beispielsweise auf das Dreifache, des Nennmomentes gesetzt werden. Die Kippdrehzahl nk kann gemäß Formel (5) berechnet werden.
- Im Betriebsbereich einer Arbeitsmaschine kann die Drehzahl-Drehmoment-Kennlinie des Asynchronmotors aus
Fig. 5a als Gerade durch die Punkte (MN ; nN), gegeben durch Nenndrehmoment MN bei Nenndrehzahl nN, und (M = 0; n0), gegeben durch Drehmoment M = 0 bei synchroner Drehzahl n0, angenähert werden. Es ergibt sich folgende vereinfachte Drehzahl-Drehmoment-Kennlinie, n-M-Kennlinie des Asynchronmotors:
- Diese angenäherte oder vereinfachte Drehzahl-Drehmoment-Kennlinie ist in
Fig. 5b und die daraus abgeleitete vereinfachte Drehzahl-Leistungs-Kennlinie inFig. 6b dargestellt:
- In beiden Fällen, mit vereinfachter linearer n-P-Kennlinie gemäß Formel (15) oder unter Verwendung der Kloss'schen Formel abgeleiteter n-P-Kennlinie gemäß Formel (13), ist aus der Antriebsdrehzahl n in einem Verfahrensschritt 25 die von einer Arbeitsmaschine aufgenommene Leistung P2(n) bestimmbar.
- Mit Kenntnis der aufgenommenen Leistung P2 der Arbeitsmaschine und unter Verwendung der Q-P-Kennlinie kann die Fördermenge Q in einem Verfahrensschritt 26 bestimmt werden.
-
Fig. 7 zeigt eine schematische Darstellung eines alternativen, erfindungsgemäßen Verfahrens 21 unter Verwendung einer lastabhängigen Drehzahl-Förderstrom-Kennlinie oder n-Q-Kennlinie. Bei diesem Verfahren ist in einem Datenspeicher 33 die Schaufelzahl z sowie eine lastabhängige Drehzahl-Förderstrom-Kennlinie n(Q), gegeben durch mehrere (i) Stützwerte (n_1; Q_1), (n_2; Q_2), ... (n_i; Q_i), gespeichert. Erfindungsgemäß wurde erkannt, dass eine auswertbare Drehzahländerung über den Förderstrombereich existiert. Eine solche lastabhängige Drehzahl-Drehmoment-Kennlinie kann während eines regulären Betriebs der Pumpe lernend ermittelt und gespeichert werden. Alternativ kann in einem Testlauf der Pumpe, der beispielsweise bei einer Inbetriebnahme der Pumpe erfolgt, für mehrere Betriebspunkte mit bekannter Fördermenge, darunter beispielsweise Q0, Qmax, die jeweilige Betriebsdrehzahl ermittelt und gespeichert werden. Wiederum erfolgt in dem inFig. 7 dargestellten Verfahren eine Erfassung 22 einer Messgröße und über die Verfahrensschritte 23 und 24 wird die Antriebsdrehzahl n der Arbeitsmaschine ermittelt. In dem inFig. 7 gezeigten Verfahren wird nun in einem Verfahrensschritt 27 unter Zuhilfenahme der Stützwerte (n_1; Q_1), (n_2; Q_2), ... (n_i, Q_i) die momentane Fördermenge Q ermittelt. Somit kann die Fördermenge Q der Kreiselpumpe direkt aus der Drehzahl n ermittelt werden. Eine solche lastabhängige Drehzahl-Förderstrom-Kennlinie, die üblicherweise für eine Pumpe nicht dokumentiert ist, ist inFig. 8 gezeigt. -
Fig. 9 zeigt ein kombiniertes Verfahren zur Bestimmung von Q, das eine Betriebspunktbestimmung, sowohl aus der Förderhöhe H und aus der Leistung P2 durchführt. Auch bei diesem Verfahren wird die Druckpulsation des druckseitigen Druckes p2 zur Bestimmung der Wellenleistung P2 und der Fördermenge Q benutzt. Das Verfahren enthält wiederum die bereits inFig. 3 beschriebenen Verfahrensschritte 23, 24 und 25. In einem Datenspeicher 30 sind wiederum die bereits inFig. 3 beschriebenen Parameter sowie die Q-P-Kennlinie abgespeichert. Zusätzlich ist die Förderstrom-Förderhöhen-Kennlinie, die Q-H-Kennlinie, der Kreiselpumpe, abgelegt. Dazu wird die Stütztabelle für die Q-P-Kennlinie um entsprechende Förderhöhenwerte H_1, H_2 ... H_i ergänzt. - Zur Bestimmung der Fördermenge Q wird in einem Verfahrensschritt 28 die Fördermenge nach einem kombinierten Verfahren aus Förderstrom-Förderhöhen-Kennlinie und Förderstrom-Leistungs-Kennlinie der Kreiselpumpe bestimmt. Somit ist die Betriebspunktbestimmung genauer und zuverlässiger durchführbar. Die benötigte Förderhöhe H wird in einem Verfahrensschritt 15 aus Endruck p2 und Saugdruck p1 berechnet.
-
Fig. 10 zeigt eine Kreiselpumpenanordnung 50, bei der eine Kreiselpumpe 51 über eine Welle 53 mit einem Asynchronmotor 52 verbunden ist, der die Kreiselpumpe 51 antreibt. Dazu wird der Asynchronmotor 52 von einer Netzzuleitung 54 gespeist. Der Asynchronmotor 52 weist ein Typenschild 55 mit charakteristischen Kenngrößen des Asynchronmotors 52 auf. An einem Druckstutzen 56 der Kreiselpumpe 51 ist ein Drucksensor 57 zur Messung des druckseitigen Druckes oder Enddruckes der Kreiselpumpe 51 angeordnet. Der Drucksensor 57 ist über eine Leitung 58 mit einer erfindungsgemäßen Vorrichtung 61 verbunden. Die erfindungsgemäße Vorrichtung 61 wertet die Messsignale des Drucksensors 57 aus und bestimmt den Betriebspunkt der Arbeitsmaschine 51. Sie nutzt dazu das erfindungsgemäße Verfahren. Zur Durchführung des Verfahrens genügen als charakteristische Kenngrößen des Asynchronmotors die Typenschilddaten Nennleistung P2N und die Nenndrehzahl nN. Alle anderen Motorparameter sind daraus ableitbar oder berechenbar. Die Vorrichtung 61 hat einen zur Erfassung der Drucksignale geeigneten Anschluss oder Signaleingang 62. Es hat sich als zweckmäßig erwiesen, den Signaleingang 62 für Signalanteile bis zu 500 Hz auszulegen. Ein solcher Eingang ist kostengünstiger als ein hochdynamischer Eingang, der Signale im Frequenzbereich von einigen Kilohertz erfassen kann, und bietet die Möglichkeit einer ausreichend schnellen und empfindlichen Signalerfassung. Weiterhin besitzt die Vorrichtung 61 eine Signalverarbeitungseinheit 64, die die Drehklangfrequenz fD in einer ausreichenden Genauigkeit ermittelt. Die Signalverarbeitungseinheit 64 ist in der Lage, die Drehklangfrequenz mit einer Genauigkeit von einem Zehntel Hertz oder von wenigen Hundertstel Hertz zu bestimmen. Sie verfügt über eine hohe Abtastfrequenz und/oder über entsprechend lange Abtastintervalle. Das in der Vorrichtung 61 ablaufende Verfahren wird von einer Recheneinheit 65 gesteuert und koordiniert. Weiterhin weist die Vorrichtung 61 eine Anzeige- und/oder Bedieneinheit 66 auf. An der Vorrichtung kann ein, hier nicht dargestellter, weiterer Drucksensoranschluss vorgesehen sein, der beispielsweise zur Erfassung eines Pumpensaugdruckes dient. Darüber hinaus kann die Vorrichtung weitere, hier nicht dargestellte Signaleingänge und/oder eine serielle Busschnittstelle, beispielsweise zum Ein- oder Auslesen von Parametern, aufweisen. -
Fig. 11 zeigt eine Kreiselpumpenanordnung, bestehend aus Kreiselpumpe 51 und Asynchronmotor 52, und eine Vorrichtung zur Betriebspunktbestimmung in Form eines Mobiltelefons 71. Diese bestimmt den Betriebspunkt der Kreiselpumpe 51 aus dem von der Kreiselpumpe 51 übertragenen Luftschall. Dazu weist das Mobiltelefon 71 ein integriertes Mikrofon 72 auf. Das Mobiltelefon 71 nutzt in diesem Ausführungsbeispiel das erfindungsgemäße Verfahren. Dazu kann in einem - hier nicht dargestellten - Datenspeicher des Mobiltelefons 71 ein entsprechender Programmablauf gespeichert sein, der von einer in dem Mobiltelefon befindlichen - hier nicht dargestellten Recheneinheit - abgearbeitet wird. - Die Vorrichtung kann auch, wie in
Fig. 12 dargestellt, räumlich getrennt von einer Arbeitsmaschine deren Betriebspunkt bestimmen. InFig. 12 ist die gleiche Kreiselpumpenanordnung wie inFig. 11 , bestehend aus Kreiselpumpe 51 und Asynchronmotor 52, gezeigt. Ein Mobiltelefon 71 mit integriertem Mikrofon 72 erfasst an einem durch gestrichelte Linie kenntlich gemachten Betriebsort 78 der Kreiselpumpe 51 und des Asynchronmotors 52 die Betriebsgeräusche der Arbeitsmaschine 51. Das Mobiltelefon 71 erfasst dazu die Luftschallsignale der Arbeitsmaschine 51. Eine Vorrichtung 61 zur Betriebspunktbestimmung ist räumlich getrennt von der Arbeitsmaschine 51 angeordnet, an einem Ort 79, an dem die Betriebspunktbestimmung durchgeführt wird. Die Vorrichtung 61 nutzt Telekommunikationsmittel, die als Signalübertragungsmittel dienen, um die Betriebspunktbestimmung räumlich getrennt von der Arbeitsmaschine 51 durchzuführen. Die vom Mobiltelefon 71 erfassten Luftschallsignale der Kreiselpumpe 51 werden mittels Telekommunikationsnetz 77 an die Vorrichtung 61 übertragen oder übermittelt.
Claims (20)
- Verfahren zur Bestimmung eines Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors, wobei eine von der Arbeitsmaschine aufgenommene Leistung und/oder deren Fördermenge einen Betriebspunkt charakterisiert, ein oder mehrere betriebspunktabhängige Messgrößen der Arbeitsmaschine durch ein oder mehrere Sensoren erfasst werden und die Messwerte während eines Betriebs der Arbeitsmaschine ausgewertet und/oder gespeichert werden,
dadurch gekennzeichnet, dass
der Betriebspunkt ohne die Verwendung von elektrischen Messgrößen des antreibenden Asynchronmotors bestimmt wird, dass aus einer mechanischen Messgröße Druck, Differenzdruck, Kraft, Vibration, Körperschall oder Luftschall, mittels einer Signalanalyse, insbesondere einer Frequenzanalyse, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz ermittelt wird, wobei daraus die Drehzahl (n) der Antriebsmaschine ermittelt wird und aus der schlupfbedingten Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors (52) der Betriebspunkt bestimmt wird. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die aufgenommene Leistung (P2) der Arbeitsmaschine durch folgende Schritte bestimmt wird:- Bestimmung der Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52), insbesondere durch vorgegebene Motorparameter Bemessungsleistung (P2N) und Bemessungsdrehzahl (nN), gegebenenfalls synchrone Drehzahl (n0), Kippmoment (Mk), Kippdrehzahl (nk) oder Kippschlupf (sk).- Bestimmung der aufgenommenen Leistung (P2) oder des Drehmomentes (M) des Motors (52) aus ermittelter Antriebsdrehzahl (n) und Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52).
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass bei einer Pumpe, insbesondere einer Kreiselpumpe (51), als Arbeitsmaschine die Ermittlung einer Fördermenge (Q) der Pumpe aus deren Antriebsdrehzahl (n) erfolgt.
- Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass die Fördermenge (Q) der Pumpe aus der aus der Antriebsdrehzahl (n) ermittelten aufgenommenen Leistung (P2) bestimmt wird.
- Verfahren nach Anspruch 3 oder 4, dadurch gekennzeichnet, dass die Fördermenge (Q) der Pumpe aus Parametern des Motors (52), die eine Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52) beschreiben, sowie aus Parametern der Pumpe, die eine Förderstrom-Leistungs-Kennlinie (10) beschreiben, und der Antriebsdrehzahl (n) bestimmt wird.
- Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass die Fördermenge (Q) der Kreiselpumpe (51) aus einer Kennlinie, die die lastabhängige Drehzahländerung über der Fördermenge (Q) der Pumpe darstellt, bestimmt wird.
- Verfahren nach einem der Ansprüche 3 bis 6, dadurch gekennzeichnet, dass die Antriebsdrehzahl (n) zur Bestimmung des Betriebspunktes der Pumpe, insbesondere der Kreiselpumpe (51), aus Messwerten von ein oder mehreren Drucksensoren (57) ermittelt wird.
- Verfahren nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass die Antriebsdrehzahl (n) zur Bestimmung des Betriebspunktes der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors (52) aus Messwerten von ein oder mehreren Körperschall- und/oder Luftschallsensoren ermittelt wird.
- Verfahren zur Überwachung des nach einem der Ansprüche 1 bis 8 ermittelten Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors, dadurch gekennzeichnet, dass anhand eines außerhalb eines vorgegebenen Bereichs befindlichen Betriebspunkts ein fehlerhafter Betriebszustand, insbesondere als Über- oder Unterlast, der Arbeitsmaschine und/oder des Asynchronmotors (52) erkannt wird.
- Vorrichtung zur Bestimmung und/oder Überwachung eines Betriebspunktes einer Arbeitsmaschine und/oder eines diese antreibenden Asynchronmotors, wobei die von der Arbeitsmaschine aufgenommene Leistung und/oder deren Fördermenge einen Betriebspunkt charakterisiert, mit ein oder mehreren Eingängen zur Erfassung von betriebspunktabhängigen Messgrößen, dadurch gekennzeichnet, dass die Vorrichtung (61) einen Datenspeicher (30, 33) für technologische Daten der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors aufweist und aus einer mechanischen Messgröße Druck, Differenzdruck, Kraft, Vibration, Körperschall oder Luftschall mittels einer Signalanalyse, insbesondere einer Frequenzanalyse, eine zum Drehklang der Arbeitsmaschine linear proportionale Frequenz ermittelt, daraus die Drehzahl (n) der Antriebsmaschine ermittelt und aus der schlupfbedingten Drehzahl-Drehmoment-Abhängigkeit des Asynchronmotors (52) den Betriebspunkt aus nicht elektrischen Messgrößen bestimmt und gegebenenfalls überwacht.
- Vorrichtung nach Anspruch 10, dadurch gekennzeichnet, dass die aufgenommene Leistung der Arbeitsmaschine durch folgende Schritte bestimmt ist:- Bestimmung der Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52), insbesondere durch vorgegebene Motorparameter Bemessungsleistung (P2N) und Bemessungsdrehzahl (nN), gegebenenfalls synchrone Drehzahl (n0), Kippmoment (Mk), Kippdrehzahl (nk) oder Kippschlupf (sk)- Bestimmung der aufgenommenen Leistung (P2) oder des Drehmomentes (M) des Motors (52) aus der Antriebsdrehzahl (n) und der Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52).
- Vorrichtung nach Anspruch 10 oder 11, dadurch gekennzeichnet, dass die Arbeitsmaschine eine Pumpe, insbesondere Kreiselpumpe (51), ist und die Betriebspunktbestimmung die Ermittlung einer Fördermenge (Q) der Pumpe aus der Antriebsdrehzahl (n) beinhaltet.
- Vorrichtung nach Anspruch 12, dadurch gekennzeichnet, dass die Vorrichtung (61) die Fördermenge (Q) der Pumpe, insbesondere Kreiselpumpe (51), aus der aus der Antriebsdrehzahl (n) ermittelten aufgenommen Leistung (P2) bestimmt.
- Vorrichtung nach Anspruch 12 oder 13, dadurch gekennzeichnet, dass die Vorrichtung (61) die Fördermenge (Q) der Pumpe, insbesondere Kreiselpumpe (51), aus Parametern des Motors (52), die eine Drehzahl-Drehmoment-Kennlinie (M(n)) des Motors (52) beschreiben, sowie aus Parametern der Pumpe, die eine Förderstrom-Leistungs-Kennlinie (10) beschreiben, und der Antriebsdrehzahl (n) bestimmt.
- Vorrichtung nach Anspruch 12, dadurch gekennzeichnet, dass die Vorrichtung (61) die Fördermenge (Q) der Pumpe, insbesondere Kreiselpumpe (51), aus einer Kennlinie, die die lastabhängige Drehzahländerung über der Fördermenge (Q) der Pumpe darstellt, bestimmt.
- Vorrichtung nach einem der Ansprüche 10 bis 15, dadurch gekennzeichnet, dass die Vorrichtung (61) mindestens einen Signaleingang (62) für einen Drucksensor (57) aufweist und aus Messwerten eines angeschlossenen Drucksensors (57) die Antriebsdrehzahl (n) zur Bestimmung des Betriebspunktes der Arbeitsmaschine ermittelt.
- Vorrichtung nach einem der Ansprüche 10 bis 15, dadurch gekennzeichnet, dass die Vorrichtung (61) mindestens einen Signaleingang für einen Körperschall- und/oder Luftschallsensor aufweist und aus Messwerten eines angeschlossenen Körperschall- und/oder Luftschallsensors die Antriebsdrehzahl (n) zur Bestimmung des Betriebspunktes der Arbeitsmaschine und/oder des diese antreibenden Asynchronmotors (52) ermittelt.
- Vorrichtung nach einem der Ansprüche 10 bis 15 oder 17, dadurch gekennzeichnet, dass die Vorrichtung zur Erfassung von betriebspunktabhängigen Messgrößen mit einem Mikrofon (72) verbindbar ist oder ein integriertes Mikrofon (72) aufweist.
- Vorrichtung nach Anspruch 18, dadurch gekennzeichnet, dass die Vorrichtung ein Telefon, insbesondere ein Mobiltelefon (71), zur Erfassung der Betriebsgeräusche der Arbeitsmaschine und zur Betriebspunktbestimmung und/oder-Überwachung ist.
- Vorrichtung nach Anspruch 18, dadurch gekennzeichnet, dass die Vorrichtung (61) Telekommunikationsmittel, insbesondere ein Telefon oder Mobiltelefon (71) und ein Telekommunikationsnetz (77) nutzt, um die Betriebspunktbestimmung und/oder -Überwachung an einem anderen Ort (79) als dem Betriebsort (78) der Arbeitsmaschine durchzuführen.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SI201031081T SI2433010T1 (sl) | 2009-05-20 | 2010-04-27 | Postopek in naprava za določitev obratovalne točke delovnega stroja |
| HRP20151394TT HRP20151394T1 (hr) | 2009-05-20 | 2010-04-27 | Metoda i uređaj za određivanje radne točke nekog radnog stroja |
| PL10717116T PL2433010T3 (pl) | 2009-05-20 | 2010-04-27 | Sposób i urządzenie do określania punktu znamionowego pracy maszyny roboczej |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009022107A DE102009022107A1 (de) | 2009-05-20 | 2009-05-20 | Verfahren und Vorrichtung zur Betriebspunktbestimmung einer Arbeitsmaschine |
| PCT/EP2010/055621 WO2010133425A1 (de) | 2009-05-20 | 2010-04-27 | Verfahren und vorrichtung zur betriebspunktbestimmung einer arbeitsmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2433010A1 EP2433010A1 (de) | 2012-03-28 |
| EP2433010B1 true EP2433010B1 (de) | 2015-09-23 |
Family
ID=42286674
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10717116.7A Active EP2433010B1 (de) | 2009-05-20 | 2010-04-27 | Verfahren und vorrichtung zur betriebspunktbestimmung einer arbeitsmaschine |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US8763464B2 (de) |
| EP (1) | EP2433010B1 (de) |
| JP (1) | JP5868846B2 (de) |
| CN (1) | CN102439318B (de) |
| BR (1) | BRPI1007672B1 (de) |
| DE (1) | DE102009022107A1 (de) |
| DK (1) | DK2433010T3 (de) |
| ES (1) | ES2556236T3 (de) |
| HR (1) | HRP20151394T1 (de) |
| HU (1) | HUE028262T2 (de) |
| PL (1) | PL2433010T3 (de) |
| PT (1) | PT2433010E (de) |
| RU (1) | RU2536656C2 (de) |
| SI (1) | SI2433010T1 (de) |
| WO (1) | WO2010133425A1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017214203A1 (de) | 2017-08-15 | 2019-02-21 | KSB SE & Co. KGaA | Verfahren zum Schutz vor Kavitation bei Cyberangriffen und Einheit zur Durchführung des Verfahrens |
| WO2019096545A1 (de) | 2017-11-15 | 2019-05-23 | KSB SE & Co. KGaA | Verfahren und vorrichtung zum cyberangriffsschutz von pumpenaggregaten |
| WO2022038026A1 (de) | 2020-08-18 | 2022-02-24 | KSB SE & Co. KGaA | Verfahren zur bestimmung einer synchrondrehzahl |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011101599B4 (de) * | 2011-05-13 | 2021-08-05 | Sew-Eurodrive Gmbh & Co Kg | System zur Bestimmung von Körperschall bei einem Prüfling |
| ITCO20110069A1 (it) * | 2011-12-20 | 2013-06-21 | Nuovo Pignone Spa | Disposizione di prova per uno stadio di un compressore centrifugo |
| EP2618002B1 (de) * | 2012-01-17 | 2016-05-04 | ABB Technology Oy | Verfahren zur Erkennung der richtigen Drehrichtung eines zentrifugalen Vorrichtung und zentrifugale Vorrichtungsanordnung |
| KR20130115488A (ko) * | 2012-04-12 | 2013-10-22 | 엘에스산전 주식회사 | 이동단말의 인버터상태 알림장치와 모터상태 분석장치 |
| DE102012013774A1 (de) * | 2012-07-11 | 2014-01-16 | Wilo Se | Kreiselpumpe mit Durchflussmesser |
| DE102013017828B4 (de) * | 2013-10-24 | 2015-05-13 | Fresenius Medical Care Deutschland Gmbh | Verfahren und Vorrichtung zur Überwachung einer in einem extrakorporalen Blutkreislauf oder einer in einem Dialysatkreislauf angeordneten Impellerpumpe und Blutbehandlungsvorrichtung |
| DE102014214033A1 (de) * | 2014-07-18 | 2016-01-21 | Ksb Aktiengesellschaft | Bestimmung des Förderstroms einer Pumpe |
| EP3207256B1 (de) * | 2014-10-15 | 2023-11-29 | Grundfos Holding A/S | Verfahren und system zur fehlererkennung für pumpen über hand-kommunikationsgerät |
| US9785126B2 (en) * | 2014-11-25 | 2017-10-10 | Rockwell Automation Technologies, Inc. | Inferred energy usage and multiple levels of energy usage |
| DE102015215466A1 (de) | 2015-08-13 | 2017-02-16 | Ksb Aktiengesellschaft | Einstellung des Förderstroms eines Verbrauchers |
| CN108071626B (zh) * | 2016-11-17 | 2021-03-26 | 恩格尔机械(上海)有限公司 | 成型机及其运行方法 |
| EP4365453A3 (de) * | 2016-12-30 | 2024-07-10 | Grundfos Holding A/S | Verfahren zum betreiben eines elektronisch gesteuerten pumpenaggregates |
| EP3242036B1 (de) * | 2016-12-30 | 2020-10-28 | Grundfos Holding A/S | Verfahren zum erfassen eines zustandes eines pumpenaggregats |
| US10697318B2 (en) * | 2017-01-12 | 2020-06-30 | General Electric Company | Efficiency maps for tracking component degradation |
| DE102017111479B4 (de) * | 2017-05-24 | 2025-08-21 | Hengst Se | Verfahren zum Betreiben eines Zentrifugalabscheiders |
| DE102017213131A1 (de) | 2017-07-31 | 2019-01-31 | Robert Bosch Gmbh | Verfahren und Steuergerät zum Steuern eines Aktuators eines Systems sowie derartiges System |
| DE102018200651A1 (de) * | 2018-01-16 | 2019-07-18 | KSB SE & Co. KGaA | Verfahren zur Eigendiagnose des mechanischen und/oder hydraulischen Zustandes einer Kreiselpumpe |
| US20210062803A1 (en) * | 2018-01-24 | 2021-03-04 | Magnetic Pumping Solutions Llc | Method and system for monitoring the condition of rotating systems |
| DE102018104394A1 (de) * | 2018-02-27 | 2019-08-29 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Arbeitspunktbestimmung |
| CN109084851B (zh) * | 2018-06-29 | 2020-05-19 | 农业部南京农业机械化研究所 | 基于麦克风的植保无人机的隔膜泵喷洒流量测试方法 |
| DE102018211869A1 (de) * | 2018-07-17 | 2020-01-23 | Ziehl-Abegg Se | Verfahren zur Ermittlung einer Fluidförderkenngröße |
| EP3618266A1 (de) * | 2018-08-28 | 2020-03-04 | Siemens Aktiengesellschaft | Ermittlung einer drehzahl eines rotors durch schwingungsanalyse |
| AT522652A1 (de) * | 2019-05-23 | 2020-12-15 | Plasser & Theurer Export Von Bahnbaumaschinen Gmbh | Verfahren und Vorrichtung zum Steuern/Regeln eines rotatorischen Antriebs eines Arbeitsaggregates einer Gleisbaumaschine |
| IT201900009747A1 (it) * | 2019-06-21 | 2020-12-21 | Calpeda A Spa | Metodo di gestione e controllo di un sistema di pressurizzazione |
| DE102019212325A1 (de) * | 2019-08-17 | 2021-02-18 | Ziehl-Abegg Se | Verfahren zur quantitativen Bestimmung einer aktuellen betriebszustandsabhängigen Größe eines Ventilators, insbesondere einer Druckänderung oder Druckerhöhung, und Ventilator |
| GB2591100A (en) * | 2020-01-14 | 2021-07-21 | Edwards Ltd | Vacuum pump monitoring method and apparatus |
| EP3907568A1 (de) * | 2020-05-08 | 2021-11-10 | Siemens Aktiengesellschaft | Verfahren und systeme zum bereitstellen eines simulationsmodells einer elektrischen rotatorischen maschine |
| GB2607568A (en) * | 2021-05-21 | 2022-12-14 | Edwards Ltd | Pump monitoring system and method |
| EP4361582B1 (de) | 2022-10-24 | 2025-02-26 | Wilo Se | Verfahren zur zustandsuntersuchung bei einem pumpenaggregat sowie softwareapplikation, speichermedium und untersuchungsgerät zur ausführung des verfahrens |
| DE102022128744A1 (de) | 2022-10-28 | 2024-05-08 | KSB SE & Co. KGaA | Verfahren zum Informationsaustausch zwischen einem externen Empfänger und einer Pumpe |
| EP4386210A1 (de) * | 2022-12-14 | 2024-06-19 | Schneider Toshiba Inverter Europe SAS | Verfahren zur erkennung von laufradverschleiss und übermässigem verschleissringspiel in kreiselpumpen |
| CN116292336B (zh) * | 2023-05-12 | 2023-09-19 | 安徽明泉水设备有限公司 | 一种水泵叶片检测方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2946049A1 (de) * | 1979-11-15 | 1981-05-27 | Hoechst Ag, 6000 Frankfurt | Verfahren zum regeln des durchflusses von kreiselpumpen |
| JPS63198792A (ja) * | 1987-02-13 | 1988-08-17 | Toshiba Corp | ポンプ制御装置 |
| DD258467A1 (de) | 1987-03-12 | 1988-07-20 | Nahrungsguetermaschinenbau Veb | Anordnung zur bestimmung der leistung und/oder des moments an induktionsmotoren |
| SU1665087A1 (ru) * | 1989-04-29 | 1991-07-23 | Ульяновское высшее военно-техническое училище им.Богдана Хмельницкого | Насосна установка |
| DE3927476A1 (de) * | 1989-08-19 | 1991-02-21 | Guenther & Co Gmbh & Co | Verfahren zur drehmoment- und/oder leistungsueberwachung von antrieben |
| US5267453A (en) * | 1991-06-06 | 1993-12-07 | Guilford Mills, Inc. | Loop-type textile fastener fabric and method of producing same |
| DE4330097A1 (de) * | 1993-09-06 | 1995-03-09 | Klein Schanzlin & Becker Ag | Kreiselpumpengehäuse mit Fördermengenmeßeinrichtung |
| DE19618462A1 (de) | 1996-05-08 | 1997-11-13 | Status Pro Maschinenmesstechni | Verfahren und Vorrichtung zum Bestimmen eines extrinsischen Leistungsparameters einer energieumwandelnden Vorrichtung |
| US6260004B1 (en) * | 1997-12-31 | 2001-07-10 | Innovation Management Group, Inc. | Method and apparatus for diagnosing a pump system |
| JP2000136790A (ja) * | 1998-11-04 | 2000-05-16 | Hitachi Ltd | ゲートポンプ装置 |
| DE19858946A1 (de) * | 1998-12-09 | 2000-06-15 | Ver Energiewerke Ag | Verfahren zur Feststellung von Kavitation an einer mehrstufigen Kreiselpumpe |
| DE10039917A1 (de) * | 2000-08-16 | 2002-02-28 | Ksb Ag | Verfahren und Vorrichtung zur Ermittlung der Fördermenge einer Kreiselpumpe |
| JP3723866B2 (ja) * | 2001-02-07 | 2005-12-07 | 株式会社日立製作所 | インターナルポンプの性能監視方法及び装置 |
| US6536271B1 (en) * | 2001-09-13 | 2003-03-25 | Flowserve Management Company | Pump with integral flow monitoring |
| US6648606B2 (en) * | 2002-01-17 | 2003-11-18 | Itt Manufacturing Enterprises, Inc. | Centrifugal pump performance degradation detection |
| GB0217494D0 (en) * | 2002-07-29 | 2002-09-04 | Boc Group Plc | Conditioning monitoring of pumps and pump systems |
| DE10334817A1 (de) * | 2003-07-30 | 2005-03-10 | Bosch Rexroth Ag | Vorrichtung und Verfahren zur Fehlererkennung an Pumpen |
| DE10359726A1 (de) | 2003-12-19 | 2005-07-14 | Ksb Aktiengesellschaft | Mengenmessung |
| EP1564411B2 (de) * | 2004-02-11 | 2015-08-05 | Grundfos A/S | Verfahren zur Ermittlung von Fehlern beim Betrieb eines Pumpenaggregates |
| RU2256100C1 (ru) * | 2004-08-18 | 2005-07-10 | Гаспарянц Рубен Саргисович | Способ диагностирования при работе с перегрузкой электродвигателей магистральных насосов нефтеперекачивающей станции магистрального нефтепровода (нпс мн) |
| JP2006307682A (ja) * | 2005-04-26 | 2006-11-09 | Ebara Densan Ltd | ポンプ装置 |
| DE102006049440B4 (de) | 2005-10-17 | 2014-08-21 | Ifm Electronic Gmbh | Verfahren, Sensor und Diagnosegerät zur Pumpendiagnose |
| US7693684B2 (en) * | 2005-10-17 | 2010-04-06 | I F M Electronic Gmbh | Process, sensor and diagnosis device for pump diagnosis |
| JP4625777B2 (ja) * | 2006-02-28 | 2011-02-02 | 株式会社東芝 | ポンプ健全性評価システム、ポンプ健全性評価装置とその評価方法、評価プログラム |
| DE102007022348A1 (de) * | 2007-05-12 | 2008-11-13 | Ksb Aktiengesellschaft | Einrichtung und Verfahren zur Störungsüberwachung |
| KR101364396B1 (ko) * | 2008-11-28 | 2014-02-17 | 스미도모쥬기가이고교 가부시키가이샤 | 하이브리드식 작업기계의 제어방법, 및 하이브리드식 작업기계의 펌프출력 제한방법 |
-
2009
- 2009-05-20 DE DE102009022107A patent/DE102009022107A1/de not_active Withdrawn
-
2010
- 2010-04-27 EP EP10717116.7A patent/EP2433010B1/de active Active
- 2010-04-27 HR HRP20151394TT patent/HRP20151394T1/hr unknown
- 2010-04-27 ES ES10717116.7T patent/ES2556236T3/es active Active
- 2010-04-27 RU RU2011151763/06A patent/RU2536656C2/ru active
- 2010-04-27 PL PL10717116T patent/PL2433010T3/pl unknown
- 2010-04-27 HU HUE10717116A patent/HUE028262T2/en unknown
- 2010-04-27 CN CN201080022540.XA patent/CN102439318B/zh active Active
- 2010-04-27 JP JP2012511220A patent/JP5868846B2/ja active Active
- 2010-04-27 PT PT107171167T patent/PT2433010E/pt unknown
- 2010-04-27 WO PCT/EP2010/055621 patent/WO2010133425A1/de not_active Ceased
- 2010-04-27 DK DK10717116.7T patent/DK2433010T3/en active
- 2010-04-27 SI SI201031081T patent/SI2433010T1/sl unknown
- 2010-04-27 BR BRPI1007672-7A patent/BRPI1007672B1/pt active IP Right Grant
-
2011
- 2011-11-18 US US13/300,261 patent/US8763464B2/en active Active
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017214203A1 (de) | 2017-08-15 | 2019-02-21 | KSB SE & Co. KGaA | Verfahren zum Schutz vor Kavitation bei Cyberangriffen und Einheit zur Durchführung des Verfahrens |
| WO2019034426A2 (de) | 2017-08-15 | 2019-02-21 | KSB SE & Co. KGaA | Verfahren zum schutz von kavitation bei cyberangriffen und einheit zur durchführung des verfahrens |
| US11475129B2 (en) | 2017-08-15 | 2022-10-18 | KSB SE & Co. KGaA | Method for the protection against cavitation in cyber attacks and unit for carrying out the method |
| WO2019096545A1 (de) | 2017-11-15 | 2019-05-23 | KSB SE & Co. KGaA | Verfahren und vorrichtung zum cyberangriffsschutz von pumpenaggregaten |
| US11487262B2 (en) | 2017-11-15 | 2022-11-01 | KSB SE & Co. KGaA | Method and apparatus for protecting pump units from cyber attacks |
| WO2022038026A1 (de) | 2020-08-18 | 2022-02-24 | KSB SE & Co. KGaA | Verfahren zur bestimmung einer synchrondrehzahl |
| DE102020005050A1 (de) | 2020-08-18 | 2022-02-24 | KSB SE & Co. KGaA | Verfahren zur Bestimmung einer Synchrondrehzahl |
| EP4200971B1 (de) * | 2020-08-18 | 2025-01-15 | KSB SE & Co. KGaA | Verfahren zur bestimmung einer synchrondrehzahl |
Also Published As
| Publication number | Publication date |
|---|---|
| PT2433010E (pt) | 2016-01-26 |
| BRPI1007672A2 (pt) | 2016-08-02 |
| US8763464B2 (en) | 2014-07-01 |
| HRP20151394T1 (hr) | 2016-02-12 |
| JP2012527563A (ja) | 2012-11-08 |
| PL2433010T3 (pl) | 2016-03-31 |
| JP5868846B2 (ja) | 2016-02-24 |
| HUE028262T2 (en) | 2016-12-28 |
| BRPI1007672B1 (pt) | 2020-10-27 |
| DE102009022107A1 (de) | 2010-11-25 |
| SI2433010T1 (sl) | 2016-01-29 |
| CN102439318B (zh) | 2015-10-21 |
| WO2010133425A1 (de) | 2010-11-25 |
| EP2433010A1 (de) | 2012-03-28 |
| US20120111114A1 (en) | 2012-05-10 |
| RU2536656C2 (ru) | 2014-12-27 |
| ES2556236T3 (es) | 2016-01-14 |
| CN102439318A (zh) | 2012-05-02 |
| DK2433010T3 (en) | 2015-12-21 |
| RU2011151763A (ru) | 2013-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2433010B1 (de) | Verfahren und vorrichtung zur betriebspunktbestimmung einer arbeitsmaschine | |
| EP3803122B1 (de) | Verfahren zur bestimmung oder überwachung des zustandes einer exzenterschneckenpumpe | |
| EP3824302B1 (de) | Verfahren zum bewerten eines schwingungsverhaltens eines elektromotors | |
| EP1564411B1 (de) | Verfahren zur Ermittlung von Fehlern beim Betrieb eines Pumpenaggregates | |
| EP3169903B1 (de) | Bestimmung des förderstroms einer pumpe | |
| EP2145112B2 (de) | Einrichtung und verfahren zur störungsüberwachung | |
| EP3449132B1 (de) | Verfahren zur detektion eines abnormalen betriebszustands eines pumpenaggregats | |
| EP3263148B1 (de) | Verfahren zur ermittlung von betriebsparametern einer blutpumpe | |
| EP2696175B1 (de) | Verfahren zum Erfassen der Durchflussmenge einer Kreiselpumpe | |
| EP2258949B1 (de) | Verfahren zur Ermittlung von charakteristischen Werten, insbesondere Werten , insbesondere von Parametern, eines in einer Anlage eingebundenen elektromotorisch angetriebenen Kreiselpumpenaggregates | |
| DE102009038011B4 (de) | Verfahren zur automatischen Erfassung und Erkennung von Fehlern an einer Auswuchtmaschine | |
| EP2024712A1 (de) | Einrichtung zur messwertübertragung | |
| EP3242035B1 (de) | Verfahren zum betreiben mindestens eines pumpenaggregates von einer vielzahl von pumpenaggregaten | |
| DE102006049440B4 (de) | Verfahren, Sensor und Diagnosegerät zur Pumpendiagnose | |
| DE102015201203B4 (de) | Verfahren zur Detektion von Kavitation | |
| WO2005081390A1 (de) | Verfahren zur diagnose von betriebszuständen einer synchronpumpe sowie vorrichtung zur durchführung dieses verfahrens | |
| EP3706308B1 (de) | Vorrichtung zur kontinuierlichen schwingungsüberwachung und verfahren | |
| DE19618462A1 (de) | Verfahren und Vorrichtung zum Bestimmen eines extrinsischen Leistungsparameters einer energieumwandelnden Vorrichtung | |
| EP4386150A1 (de) | Verfahren zur informationsgewinnung bei einem abwasserpumpenaggregat und/oder einem abwasserpumpensystem | |
| AT510096A1 (de) | Wasserkraft-staudruckmaschine | |
| EP2500579A1 (de) | Erkennung von Kavitation und Mitführung von Gas in einer elektrischen Kreiselpumpe | |
| WO2016016304A1 (de) | Verfahren zur motorsteuerung eines synchron-reluktanzmotors für eine pumpe und pumpe mit synchron-reluktanzmotor | |
| DE10242305B4 (de) | Verfahren zur Messung der Drehzahl eines Pumpenmotors | |
| EP4545793A1 (de) | Verfahren zum überwachen einer kreiselpumpe | |
| WO2010034632A1 (de) | Verfahren zur früherkennung von ventilschäden in oszillierenden verdrängerpumpen und oszillierende verdrängerpumpen mit integrierter sensorik zur verwendung in diesen verfahren |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20111107 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150508 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 751412 Country of ref document: AT Kind code of ref document: T Effective date: 20151015 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502010010361 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: TUEP Ref document number: P20151394 Country of ref document: HR Ref country code: DK Ref legal event code: T3 Effective date: 20151215 Ref country code: RO Ref legal event code: EPE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2556236 Country of ref document: ES Kind code of ref document: T3 Effective date: 20160114 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20151222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151224 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: T1PR Ref document number: P20151394 Country of ref document: HR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20150923 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160123 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: T3 Ref document number: E 20184 Country of ref document: SK |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502010010361 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20160624 |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E028262 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160427 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160427 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502010010361 Country of ref document: DE Owner name: KSB SE & CO. KGAA, DE Free format text: FORMER OWNER: KSB AKTIENGESELLSCHAFT, 67227 FRANKENTHAL, DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150923 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: ODRP Ref document number: P20151394 Country of ref document: HR Payment date: 20190401 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: PC Ref document number: 751412 Country of ref document: AT Kind code of ref document: T Owner name: KSB SE & CO. KGAA, DE Effective date: 20190415 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: ODRP Ref document number: P20151394 Country of ref document: HR Payment date: 20200326 Year of fee payment: 11 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: ODRP Ref document number: P20151394 Country of ref document: HR Payment date: 20210330 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: ODRP Ref document number: P20151394 Country of ref document: HR Payment date: 20220323 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20220429 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20220425 Year of fee payment: 13 Ref country code: NO Payment date: 20220428 Year of fee payment: 13 Ref country code: BG Payment date: 20220429 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FI Payment date: 20220420 Year of fee payment: 13 Ref country code: BE Payment date: 20220422 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: RO Payment date: 20230331 Year of fee payment: 14 Ref country code: CZ Payment date: 20230322 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: ODRP Ref document number: P20151394 Country of ref document: HR Payment date: 20230327 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SK Payment date: 20230322 Year of fee payment: 14 Ref country code: PT Payment date: 20230321 Year of fee payment: 14 Ref country code: PL Payment date: 20230323 Year of fee payment: 14 Ref country code: HR Payment date: 20230327 Year of fee payment: 14 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230712 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SI Payment date: 20230324 Year of fee payment: 14 Ref country code: HU Payment date: 20230331 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: MMEP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20230501 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20230430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230428 Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230430 Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230501 Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230430 |
|
| REG | Reference to a national code |
Ref country code: HR Ref legal event code: PBON Ref document number: P20151394 Country of ref document: HR Effective date: 20240427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241028 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: MM4A Ref document number: E 20184 Country of ref document: SK Effective date: 20240427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240428 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 Ref country code: SK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240428 Ref country code: HR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240427 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250430 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250426 Year of fee payment: 16 Ref country code: ES Payment date: 20250505 Year of fee payment: 16 Ref country code: DK Payment date: 20250429 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250428 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250426 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20250501 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250424 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20250421 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: SI Ref legal event code: KO00 Effective date: 20240428 |